The torque on a dipole in uniform motion
advertisement

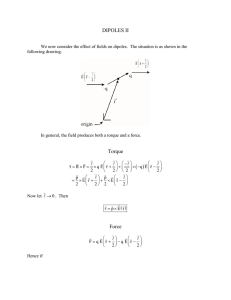
The torque on a dipole in uniform motion David J. Griffiths∗ Department of Physics, Reed College, Portland, Oregon 97202 V. Hnizdo National Institute for Occupational Safety and Health, Morgantown, West Virginia 26505 arXiv:1308.4569v3 [physics.class-ph] 18 Jan 2014 We calculate the torque on an ideal (point) dipole moving with constant velocity through uniform electric and magnetic fields. I. INTRODUCTION The torque on an electric dipole p, at rest in a uniform electric field E, is N = p × E. -q r- (1) q d r+ The torque on a magnetic dipole m, at rest in a uniform magnetic field B, is N = m × B. But what if the dipole is moving, at a constant velocity v? It is well known that a moving electric dipole acquires a magnetic dipole moment1 mv = −(v × p), (3) so one might guess that the torque on a moving electric dipole in uniform electric and magnetic fields would be2 N = (p × E) + (mv × B). (4) Similarly, a moving magnetic dipole acquires an electric dipole moment3 pv = 1 (v × m), c2 (5) and one might guess that the torque on a moving magnetic dipole would be N = (m × B) + (pv × E). (6) But these formulas are incorrect; in each case there is a third term:4 Np = (p × E) + (mv × B) + v × (p × B), Nm = (m × B) + (pv × E) + v × (pv × B). (7) (8) In general, then, N = (p × E) + (m × B) + v × (p × B). Our purpose in this note is to derive that result.5 FIG. 1. Electric dipole. (2) (9) II. ELECTRIC DIPOLE IN MOTION An electric dipole consists of positive and negative charges ±q separated by a displacement d (Figure 1). The force on a point charge is F = q (E + v × B) , (10) 6 so the torque on a dipole of moment p = qd is N = (r+ × F+ ) + (r− × F− ) = (r+ − r− ) × [q (E + v × B)] = qd × (E + v × B) = (p × E) + p × (v × B). (11) Using the vector identity p × (v × B) = v × (p × B) + (p × v) × B, the previous result becomes N = (p × E) + (mv × B) + v × (p × B). (12) That is surely the easiest way to obtain Eq. (7) (it borrows from an argument by V. Namias7 ). But the magnetic analog is not so straightforward,8 so let’s repeat the derivation, this time treating the electric dipole as the point limit of a uniformly polarized object.9 Polarization (P) and magnetization (M) together constitute an antisymmetric second-rank tensor: 0 cPx cPy cPz 0 −Mz My −cPx P µν = , (13) −cPy Mz 0 −Mx −cPz −My Mx 0 and the transformation rule gives10 v v Pz =Pz0 , Px =γ(Px0 − 2 My0 ), Py =γ(Py0 + 2 Mx0 ), (14) c c Mz =Mz0 , Mx =γ(Mx0 +vPy0 ), My =γ(My0 −vPx0 ). (15) 2 We use primes for the “proper” (rest) system of the dipole (S 0 ); no prime means the “lab” frame (S), through which the dipole is moving with velocity v ẑ. Notice that if M0 = 0, then M = −(v × P), confirming Eq. (3), and if P0 = 0, then P = (1/c2 )(v × M), confirming Eq. (5). Now, suppose we have an electric dipole p0 at rest at the origin in S 0 : P0 (x0 , y 0 , z 0 ) = p0 δ(x0 )δ(y 0 )δ(z 0 ). (16) Assume first that p0 is perpendicular to v, say p0 = p0 x̂. so N = p0 x̂×[E+(v ×B)] = (p0 ×E)+p0 ×(v ×B), (29) which agrees with Eq. (11), and hence confirms Eq. (7) for the case p0 perpendicular to v. (For this orientation the electric dipole moments in S and S 0 are the same— there is no Lorentz contraction. R This can be confirmed by integrating Eq. (18): p ≡ P d3 r = p0 .) If p0 is parallel to v, p0 = p0 ẑ, (17) (30) giving Then Px = γp0 δ(x0 )δ(y 0 )δ(z 0 ) = γp0 δ(x)δ(y)δ(γ(z − vt)) = p0 δ(x)δ(y)δ(z − vt), (18) 0 0 0 My = −vγp0 δ(x )δ(y )δ(z ) = −vp0 δ(x)δ(y)δ(z − vt), (19) Pz = p0 δ(x0 )δ(y 0 )δ(z 0 ) = (20) ∂P . ∂t (21) ρ = −p0 δ 0 (x)δ(y)δ(z − vt), (22) (24) (33) p0 δ(x)δ(y)δ 0 (z − vt)[E + (v × B)]. γ (34) The torque is N= ∇×M=vp0 [δ(x)δ(y)δ 0 (z−vt) x̂−δ 0 (x)δ(y)δ(z−vt) ẑ] , (23) ∂P = −vp0 δ(x)δ(y)δ 0 (z − vt) x̂, ∂t vp0 δ(x)δ(y)δ 0 (z − vt) ẑ, γ so that f =− In our case,12 (32) and J=− J=∇×M+ p0 δ(x)δ(y)δ 0 (z − vt) γ ρ=− where11 ρ = −∇ · P, (31) with all other components of P and M being zero. In this case, and all other components are zero. According to the Lorentz law, the force density is f = ρE + J × B, p0 δ(x)δ(y)δ(z − vt), γ p0 × [E + (v × B)]. γ (35) Because of Lorentz contraction, p = p0 /γ—as is confirmed by integrating Eq. (31)—and again we recover Eq. (7). so J = −vp0 δ 0 (x)δ(y)δ(z − vt) ẑ = −p0 δ 0 (x)δ(y)δ(z − vt) v (25) and 0 f = −p0 δ (x)δ(y)δ(z − vt)[E + (v × B)]. (26) MAGNETIC DIPOLE IN MOTION Now, suppose we have a magnetic dipole m0 , at rest at the origin, in S 0 : M0 (x0 , y 0 , z 0 ) = m0 δ(x0 )δ(y 0 )δ(z 0 ). The torque is Z N = (r × f ) d3 r Z 0 = − p0 δ (x)δ(y)δ(z − vt)r dx dy dz ×[E + (v × B)], III. (36) Assume first that m0 is perpendicular to v, say m0 = m0 x̂. (27) where r = (x, y, z). The y and z components of the integral are zero; the x component is13 Z Z 0 xδ (x)δ(y)δ(z − vt) dx dy dz = xδ 0 (x) dx = −1, (28) (37) From the transformation rule, vm0 vm0 Py =γ 2 δ(x0 )δ(y 0 )δ(z 0 )= 2 δ(x)δ(y)δ(z−vt), (38) c c Mx =γm0 δ(x0 )δ(y 0 )δ(z 0 )=m0 δ(x)δ(y)δ(z−vt). (39) This time ρ = −∇ · P = − vm0 δ(x)δ 0 (y)δ(z − vt), c2 (40) 3 ∇×M=m0 [δ(x)δ(y)δ 0 (z−vt) ŷ−δ(x)δ 0 (y)δ(z−vt) ẑ] , (41) v2 ∂P = − 2 m0 δ(x)δ(y)δ 0 (z − vt) ŷ, ∂t c (42) so J = m0 1 0 0 δ(x)δ(y)δ (z − vt)ŷ − δ(x)δ (y)δ(z − vt)ẑ , γ2 (43) and vm0 δ(x)δ 0 (y)δ(z − vt)E c2 1 + m0 2 δ(x)δ(y)δ 0 (z − vt)ŷ − δ(x)δ 0 (y)δ(z − vt)ẑ γ ×B. (44) f =− IV. HIDDEN MOMENTUM In the presence of an electric field, a magnetic dipole (a loop of electric current) carries “hidden momentum”14 ph = (1/c2 )(m × E) and hence also hidden momentum 1 Lh = 2 r × (m × E). (51) c It is “hidden” in the sense that it is not associated with overt motion of the object as a whole; it occurs in systems with internally moving parts, such as current loops.15 The total angular momentum is the sum of “overt” and hidden components: L = Lo + Lh , (52) The torque is vm0 m0 (ŷ × E) − 2 ẑ × (ŷ × B) + m0 ŷ × (ẑ × B) c2 γ = (pv × E) + (m0 × B) + v × (pv × B), (45) N= and the torque is its rate of change:16 dLo dLh + dt dt 1 = No + 2 v × (m × E). c N= in agreement with Eq. (8), for m0 perpendicular to v. (In this orientation, the magnetic dipole moments in S and S 0 areR the same, as we confirm by integrating Eq. (39): m ≡ M d3 r = m0 .) If m0 is parallel to v, m0 = m0 ẑ, (46) (53) Thus, combining Eqs. (9) and (53), the “overt” torque on a moving dipole is giving Mz = m0 δ(x0 )δ(y 0 )δ(z 0 ) = m0 δ(x)δ(y)δ(z − vt), (47) γ with all other components of P and M being zero. In this case ρ and ∂P/∂t vanish, leaving J= m0 [δ(x)δ 0 (y)δ(z − vt) x̂ − δ 0 (x)δ(y)δ(z − vt) ŷ] , γ (48) so No = (p×E)+(m×B)+v×(p×B)− 1 v×(m×E). (54) c2 By contrast, a (stationary) electric dipole has no internally moving parts, and it harbors no hidden momentum.17 However, when it is in motion it picks up a magnetic dipole moment mv = −(v) × p [Eq. (3)] that does carry hidden momentum,18 so Eq. (54) (with m = mv ) applies to this case as well.19 m0 [δ(x)δ 0 (y)δ(z − vt) x̂ − δ 0 (x)δ(y)δ(z − vt) ŷ] × B, γ (49) and the torque is f= 1 N = (m0 × B), γ ACKNOWLEDGMENT (50) which is again consistent with Eq. (8) because in this orientation pv = 0 and, integrating Eq. (47), m = m0 /γ. ∗ 1 Electronic address: griffith@reed.edu See, for instance, V. Hnizdo, “Magnetic dipole moment of a moving electric dipole,” Am. J. Phys. 80, 645-647 (2012). V.H. co-authored this note in his private capacity; no official support or endorsement by the Centers for Disease Control and Prevention is intended or should be inferred. 2 In this paper, except for Eqs. (1) and (2), p and m are the dipole moments of the moving dipoles—not the “proper” moments in the dipoles’ rest frame. 4 3 4 5 6 7 8 9 10 See, for example, K. W. H. Panofsky and M. Phillips, Classical Electricity and Magnetism, 2nd ed. (Dover, New York, 2005), Sec. 18-4. In a recent article [D. J. Griffiths and V. Hnizdo, “Mansuripur’s paradox,” Am. J. Phys. 81, 570-574 (2013)] we stated that there is no “third term” in the torque formula. This was misleading: there is a third term (in general), but it was zero (in that context) because B = 0 at the location of the dipole. If the fields are nonuniform, the torque (9) is supplemented by r × [(p · ∇)E + ∇(m · B) + p × (v · ∇)B], where r is the dipole’s displacement from the point with respect to which torques are calculated. The term inside the brackets comprises the force on a moving dipole [G. E. Vekstein, “On the electromagnetic force on a moving dipole,” Eur. J. Phys. 18, 113–117 (1997)]. This additional term vanishes when torques are calculated with respect to the position of the dipole. We shall calculate all torques and angular momenta with respect to the origin. V. Namias, “Electrodynamics of moving dipoles: The case of the missing torque,” Am. J. Phys. 57, 171-177 (1989). Of course, you could model m as separated monopoles (this is what Namias did in Ref. 7), but it turns out the torque is different for “Gilbert” dipoles and “Ampère” dipoles (tiny current loops). See Ref. 4. This approach is based on an argument by M. Mansuripur, “Trouble with the Lorentz Law of Force: Incompatibility with special relativity and momentum conservation,” Phys. Rev. Lett. 108, 193901-1-4 (2012). A simpler version starts by representing stationary electric and magnetic by their charge and current densities: ρ(r, t) = −(p0 · ∇)δ 3 (r), J(r, t) = 0; ρ(r, t) = 0, J(r, t) = −(m0 × ∇)δ 3 (r), and Lorentz transforming the 4-vector (cρ, J) to get ρ and J for moving dipoles [Eqs. (22), (25), (40), and (43)]. See, for example, D. J. Griffiths, Introduction to Electrodynamics, 4th ed. (Pearson, Boston, 2013), Eq. (12.118). 11 12 13 14 15 16 17 18 19 Ref. 10, Section 7.3.5. When attached to a delta function, the prime denotes differentiation with respect to its argument. Here we integrate by parts. W. Shockley and R. P. James, “ ‘Try simplest cases’ discovery of ‘hidden momentum’ forces on ‘magnetic currents’,” Phys. Rev. Lett. 18, 876-879 (1967); W. H. Furry, “Examples of momentum distributions in the electromagnetic field and in matter,” Am. J. Phys. 37, 621-636 (1969); L. Vaidman, “Torque and force on a magnetic dipole,” Am. J. Phys. 58, 978-983 (1990). Hidden momentum is mechanical in nature, even though it arises (typically) in electromagnetic contexts. For details see Ref. 4, or Ref. 10 (Example 12.13). If the electric field is a function of time, there will be an additional term of the form (1/c2 )r × [m × (dE/dt)], but it vanishes if the torque is calculated with respect to the dipole’s location. There is no term involving dm/dt, since the dipole moments are assumed to be constant. D. J. Griffiths,“Dipoles at rest,” Am. J. Phys. 60, 979-987 (1992). Note that a moving electric dipole carries a component of circulating current; see Hnizdo, Ref. 1. A. L. Kholmetskii, O. V. Missevitch, and T. Yarman, “Torque on a Moving Electric/Magnetic Dipole,” Prog. Electromagn. Res. B 45, 83-99 (2012). These authors claim that the last two terms are new discoveries, but both these terms were obtained already by Namias (Ref. 7, Eqs. (1) and (3); the 3rd term is implicit in the former equation). Incidentally, the same result [Eq. (54)] holds for p and m constructed from magnetic monopoles and their currents, though (curiously) the roles of the last two terms are reversed: the fourth appears already in the analog to Eq. (9), while the third is due to hidden momentum.