Chapter 2 – Laplace Transforms
advertisement

Chapter 2 – Laplace Transforms
Chapter 2 – Laplace Transforms
Goals
To describe what Laplace transforms are
To show one how to solve ODEs using Laplace transforms
To show the necessity of using inverse Laplace transforms
To show the method of partial fraction expansion for finding the inverse Laplace transform
To explain what a transfer function is
To explain the Final Value Theorem as a method of finding a system’s steady-state response
The rôle of Laplace transforms in the age of Matlab/Simulink
Control systems are used to control the behavior of mechanical, fluid, electrical, and other types of
physical systems. These systems exhibit specific behavior over time that follows the dictates of physical
laws, such as Newton’s Second Law, Kirchhoff’s Laws, flow continuity, etc. The application of such
physical laws to the system at hand results usually in a linear ordinary differential equation as an
expression of the behavior of the system over time. The solution to the ODE is the time history of the
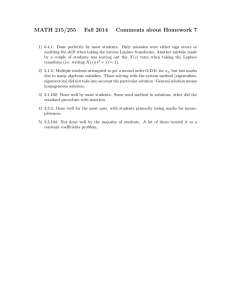
variable of interest. For a very common example found in motion control systems, a mass-damperspring system is subjected to an actuator force to drive it into a new location. Such a system is shown in
Figure 2.1.
x
F(t)
c
m
k
Figure 2.1 – mck-system
If one analyzes this system using Newton’s Second Law, one arrives at the system’s equation of motion,
which is a linear ODE in x and its derivatives.
̈
̇
The solution to this equation is x(t), the time history of the motion of the system under the influence of
the applied force. This is a typical example found often in a motion control system, and this is an
important sub-branch of controls. In automated manufacturing systems and in aircraft control systems,
for example, the aim of a control system is to move a mass from one position to another. The topic of
the next chapter is to cover mechanical systems such as this as well as systems in in other domains
(electrical, fluid, flow). The analysis of all these systems using physical laws results in corresponding
ODEs. Thus the solution of these ODEs is pertinent to getting the time behavior of these systems.
Prior to the advent of such simulation systems as Matlab/Simulink, the main solution procedure for
getting these time histories from the ODE was Laplace transforms. Much of the mathematical drudgery
of this approach can be avoided nowadays, with the use of Matlab/Simulink. So the necessity of an in2-1
Chapter 2 – Laplace Transforms
depth coverage of Laplace transforms has been obviated. Still, anyone involved in the science of control
theory needs to know the basics of Laplace transforms, because their use explains much about the
behavior of an ODE-modeled system. Thus this chapter aims to introduce you to Laplace transforms but
not overburden you with details that you will not need in this day and age of powerful, inexpensive
simulation tools.
The Laplace transform and its use
One writes the Laplace transform of a function as shown.
{
}
The actual mathematical definition of the Laplace transform is
{
}
∫
But as you shall see, for all common functions F(s) has already been worked out, so there is hardly ever
any need to resort to this definition. Thus one uses tables of Laplace transforms to solve ODEs. A table
of Laplace transforms is given in Table 2.1. The unit impulse, step, and ramp functions are common
input functions for control systems, as we shall see.
f(t)
F(s)
1
(t) (unit impulse function)
1
u(t) (unit step function)
t∙u(t) (unit ramp function)
sin(t) ∙ u(t)
cos(t) ∙ u(t)
Table 2.1 – Laplace transforms
Thus we see that functions are transformed from the t-domain into the s-domain by the Laplace
transform. This offers advantages and a means to solve differential equations. Also useful is to see how
operations such as integration and differentiation transform into the s-domain. Table 2.2 gives Laplace
transform theorems for important operations.
2-2
Chapter 2 – Laplace Transforms
t-domain
a∙f(t) (linearity)
s-domain
a∙F(s)
f1(t) + f2(t) (linearity)
F1(s) + F2(s)
̇
∫
(Final Value Theorem)
Table 2.2 – Laplace transforms of operations
The Laplace transform is linear. The implication of this is seen in the first two table entries. How
differentiation translates to the s-domain is seen in the next three table entries. There is a pattern
there. This is given in the entry for the nth derivative. Notice in all these entries that the initial
conditions of the system play an important rôle. Notice also that the pattern of powers of s decrease in
the sequence of the sum, while the order of the derivative of the initial conditions increases in the
sequence. This is very easy to mix up. It is often the case that the initial conditions of a system are all
0—that is, the system is at rest until t = 0. This greatly simplifies the solution, when this is the case. In
this case we can say that differentiation is the t-domain is equivalent to multiplication by s in the sdomain. Thus differentiation becomes an algebraic operation in the s-domain. This summarizes the
strength of the Laplace transform. Also note what happens when the degree of differentiation is -1.
This corresponds with integration in the time domain.
Solving ODEs via the Laplace transform
As we shall see in the next chapter, one often encounters 1st- and 2nd-order systems when modeling
physical components. The mck-system shown above is an example of a second order system. A 1storder system has the form
̇
Note how the ODE is arranged. x and its derivatives are on the left-hand side of the ODE. All non-x
terms are on the right. As given, there is a generic forcing function on the right. To find the time history
of x, one must know what F(t) actually is. A common loading function in practice is the step function.
This function represents a sudden, constant load applied to the previously unloaded system. One uses
2-3
Chapter 2 – Laplace Transforms
the linearity of the Laplace transform and the unit step function to model a load of any size. Thus if the
applied load is as shown in Figure 2.2
F(t)
F0
t
Figure 2.2 – Step load
its mathematical representation is
So the equation of motion of the system becomes
̇
Let’s see how one would go about solving such an ODE using Laplace transforms. First take the less
complicated case of the system at rest (0 initial conditions) when the load is applied. One uses the
linearity properties of the sum and multiplication by a constant. In the s-domain this equation becomes
We solve this equation for X(s). This is not what we want for a result. We are seeking x(t), the solution
of the ODE, the system’s time history of motion. But solving for X(s) is a step in the right direction. So
To get x(t), one looks in the Laplace transform table for an entry in the right hand column that
corresponds to the right side of the equation above. There is none. The problem is that the solution for
X(s) above is a combination of entries. To separate the components above, one uses a process called
partial fraction expansion. The procedure is as is illustrated below.
This separation of components in the denominator introduces the unknown constants A and B. To find
them, one first multiplies the equation by s.
2-4
Chapter 2 – Laplace Transforms
Then one lets s→0, which eliminates the second term on the right-hand side from the equation. Thus
Now multiply the equation by s+a.
Now let s→-a. This eliminates the first term on the right-hand side of the equation. Thus
So,
⁄
One finds the two entries, and
⁄
in the table. Multiplication by the constants
⁄ and
⁄ can be
dealt with with the linearity property. Thus
{
}
[
]
This case occurs so frequently, it is called the step response of the system.
Also very common is subjecting a second order system to a step input. This would appear
̈
̇
Again, consider a system that starts from rest, so
transform of the equation
̇
and
are both 0. Taking the Laplace
X(s) seems to be made of two components because of the two factors in the denominator—s and
s2+a∙s+b. Actually the inverse transform back into the t-domain depends upon the nature of s2+a∙s+b,
specifically whether its roots are real or complex. From the quadratic equation
√
Case 1 – Real, distinct roots
2-5
Chapter 2 – Laplace Transforms
In this case,
√
and
√
Thus
so
and one proceeds just as illustrated with the first-order system above. This is an overdamped secondorder system and can be regarded as simply a 2x(1st-order system).
Case 2 – Real, non-distinct roots
If a2 = 4b, the system has 2 repeated real roots. In this case, the previously illustrated partial fraction
expansion must be modified as follows. s = -a/2. So
To deal with the double root, one uses the following partial fraction expansion.
One finds A as previously done with the first-order system. Then the procedure differs to find B and C.
Multiply the equation by
and let s→-a/2.
To get B, differentiate the F0/s equation above with respect to s.
Now B is isolated. One lets s→-a/2 again to leave B alone.
So the trick to dealing with repeated roots is to multiply the equation for X(s) by the repeated-root
factor, then differentiate.
The case of repeated roots is known as the critically damped second order.
2-6
Chapter 2 – Laplace Transforms
Case 3 – Complex roots
If the roots of the quadratic factor are complex, the partial-fraction-expansion procedure is as follows.
To find the unknown coefficients A, B and C, one multiplies through by the denominator
.
Thus
Recall that a and b are known parameters. So matching coefficients on either side of this equation,
,
,
,
This gives then
⁄
⁄
⁄
*
⁄
+
(Eq. 2.1)
The fraction in brackets can be reworked to give
⁄
⁄
⁄
⁄
(
⁄
)
(
⁄
(
⁄
)
√
)
(
⁄
)
√
⁄
(
(Eq. 2.2)
)
If we compare the two terms of this equation with the last two entries of Table 2.1 and use the next-tothe-last entry in Table 2.2, we see that the former term represents a decaying cosine and the latter
represents a decaying sine. The results of Eq. 2.2 need then to be combined with Eq. 2.1 to get an
expression, which can be inverted back into the t-domain. The decaying sine and cosine can be
combined using trigonometric identities to yield
[
]
2-7
(Eq. 2.3)
Chapter 2 – Laplace Transforms
That is, the response consists of a decaying (
) sine with a phase shift.
Note that in the examples in this section, the denominators of the fractions that give X(s) all have 1 for
the coefficient of the highest order derivative. Often it is the case that this coefficient is not 1. For
example, for the mck-system discussed at the first of this chapter, with a step force input and zero initial
conditions
The coefficient of s2 is m. To make the above analysis apply, one can simply multiply the numerator and
denominator of the above fraction by 1/m. Thus
⁄
⁄
⁄
Now the results of the analysis of the second-order system above can be directly applied to this mcksystem, with care being taken to use F0/m for F0 in the analysis and c/m for a and k/m for b. This type of
manipulation of fractions is very common in controls, so you should review the algebra of fractions and
be very adept at their manipulation, as illustrated in the foregoing analysis.
The case of complex roots is called an underdamped second order.
Transfer function
Control systems make use of what is called the transfer function of a system. As you have seen in
Chapter 1, an important graphical tool in controls is the block diagram. Each block, with the exception
of a summing block, takes one input, operates on it, and produces an output. Thus the block transfers
the input to the output. So the contents of a block are called the transfer function of that component.
As an example, with the mck-system, the applied, external force produces a displacement. So the
cause—the input—is the force and the effect—the displacement—is the output. The transfer function is
simply the quotient of effect/cause, output/input. The transfer function is usually given the symbol G.
Thus we might write
⁄
⁄
⁄
All of these variants are useful for one purpose or another.
Final Value Theorem
As you have seen from the underdamped second order analysis, finding the inverse Laplace transform to
solve an ODE can be a tedious process. Often one is not interested in the time history of a system’s
motion but simply in its final value, where the system winds up after the dynamics have damped out.
2-8
Chapter 2 – Laplace Transforms
There is a useful theorem for Laplace transforms that is given as the last entry of Table 2.2. This
theorem, the Final Value Theorem, allows a user to answer the question of where a system winds up
without calculating the inverse Laplace transform of a system. Take the mck-system above as an
example. Subject it to a unit step input, so F(s) = 1/s. Then
Using the FVT from Table 2.2
(
)
Problems
2.1
A first-order system has the ODE
̇
The ODE is written in the variable Δh, so the “motion” of the system is the time history
. Since the right-hand side of this equation is 0, F(t) = 0, i.e. there is no “force” being applied
to the system. Work out the system response to an initial non-zero
. Plot the time
history using Matlab. About how long does it take the system to get to equilibrium?
(We will encounter this system later. It represents a tank-level system, and h is the level of a
liquid in the tank. There is a reason that the system is written in the deviation of the tank level,
Δh, rather than in the tank level itself, h, as we shall see in the following Chapter.)
2.2
Repeat Problem 2.1, but start with 0 initial conditions. Apply a “force” of 4·u(t) to the system.
Plot the system response. About how long does it take the system to get to equilibrium?
2.3
Use Laplace transforms to calculate the unit step response of the system whose ODE is
̈
̇
The initial conditions for the system are all 0. Plot the response using Matlab.
2.4
Use Laplace transforms to calculate the unit step response of the system whose ODE is
̈
̇
The initial conditions for the system are all 0. Plot the response using Matlab.
2.5
Use Laplace transforms to calculate the unit step response of the system whose ODE is
̈
̇
The initial conditions for the system are all 0. Plot the response using Matlab.
2-9
Chapter 2 – Laplace Transforms
2.6
Use Laplace transforms to calculate the unit step response of the system whose ODE is
̈
The initial conditions for the system are all 0. Plot the response using Matlab.
2-10