G u(t) y(t)
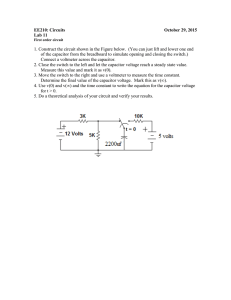
advertisement
 y(t)")
EG1110 SIGNALS AND SYSTEMS
• Split this integral between time before a reference point,0− , and a time after:
y(t) =
Input/Output analysis of systems
Z 0
−
−∞
g(τ )u(t − τ )dτ +
Z ∞
0−
g(τ )u(t − τ )dτ
• Define
Free and Forced response of systems
y0(t) =
u(t)
y(t)
G
Z 0
−
−∞
g(τ )u(t − τ )dτ
This is the response of the system due to all inputs up until time 0 −.
• Thus we get
• Let G have impulse response g(t).
General expression for y(t) is
y(t) = y0(t) +
y(t) =
Z ∞
−∞
Z ∞
0−
g(τ )u(t − τ )dτ
i.e. the system is a function of its output at time t = 0− plus an additional term.
g(τ )u(t − τ )dτ
1
2
• Assume g(t) is causal:
• Thus for a general causal linear time invariant system, output is given by
⇒ y(t) = 0 for all τ > t
y(t) = y0(t) +
(Output at time t is not dependent on anything which happens in the future)
i.e.
Z t
0−
g(τ )u(t − τ )dτ
• We denote
– yF REE (t) = y0(t) response of system if no input were applied after time t = 0.
y(t) = y0(t) +
= y0(t) +
Z t
0−
Z t
0−
g(τ )u(t − τ )dτ +
g(τ )u(t − τ )dτ
Z ∞
|t
g(τ )u(t − τ )dτ
{z
=0
}
(1)
i.e. the response due to INITIAL CONDITIONS
– yF ORCED (t) =
Rt
0−
g(τ )u(t − τ )dτ response of system due to inputs applied after time t = 0,
assuming inputs zero for all τ < t.
• Thus total response of system depends on
– “Output” at time t = 0 due to inputs applied before hand - initial conditions
– Convolution of its impulse response and input from time t = 0 to present time (t).
– Often we may have initial condition values which are easier to use than input values i.e. y 0(t)
is a fairly simple function.
3
4
Electrical example
• Let y(t) = e(t), then integrating the above equation we get:
e(t)
C
q
charge
e
voltage across capacitor
e(t) = e(t = 0) +
1
C
Z t
0
i(τ )dτ
• Now take
C capacitance
i
– y(t) = e(t) (output)
current
– u(t) = i(t) (input)
Let
i(t)
i(t) =
• Consider a capacitor which stores charge in the standard way:
1
0 < t1 < t < t2 < ∞
0
otherwise
q = Ce
q̇ = i = C ė
5
• Thus we have
6
Mechanical example
x(t)
y(t) =
=
=
=
1 Zt
e(t = 0) +
i(τ )dτ
C 0
Z
1 t2
i(τ )dτ
e(t = 0) +
C t1
1 Z t2
1dτ
e(t = 0) +
C t1
1
e(t = 0) + [t2 − t1]
C
i.e. the voltage across the capacitor (the system’s output) depends on:
F(t)
• Consider a cart rolling on wheels (assume no friction in bearings etc.)
Input
– The voltage across it at time t = 0
M
•
u(t) Force applied F (t)
Ouput y(t) velocity of ball
– The length of time for which further current is being applied (the input is being applied)
• Define input as
u(t) =
7
1
0 < t1 < t < t2 < ∞
0
otherwise
8
Then as F = mẍ (x displacement)
More on free response
• Thus velocity of cart depends on
y = ẋ
1 Zt
F (τ )dτ + ẋ(0)
=
m 0
1 Zt
F (τ )dτ
= y(0) +
m 0
1 Z t2
1dτ
= y(0) +
m t1
1
= y(0) + [t2 − t1]
m
– Its initial velocity y(0).
• Systems we are interested in often described by ordinary differential equations (ODE’s).
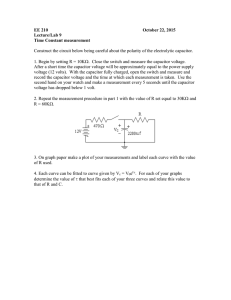
• Electrical example. Consider discharge of capacitor through resistor
– The time interval over which the external force is applied.
C
• Obviously if y(0) = 0 the velocity of the
ball after time t is different to if it was
R
some constant y(0) = c.
No forcing voltage.
9
• We know that iC = C ė and e = iR R, or IR = e/R
10
• Integrate on l.h.s from e(0) to e(t) and on r.h.s from 0 to t:
• Using Kirchoff’s current law
Z e(t)
e(0)
e
R
1
e
⇒ ė = −
CR
1
de
= −
e
dt
CR
de
1
⇒
=
dt
e
CR
C ė = −
[by separating the variables]
1
de =
e
⇒ ln[e(t)] − ln[e(0)] =
e(t)
⇒ ln
=
e(0)
e(t)
⇒
=
e(0)
⇒ e(t) =
1
dt
CR
1
t
−
CR
1
−
t
CR
1
exp[−
t]
CR
1
e0 exp[−
t]
CR
Z t
0
• Hence voltage will be an exponentially decaying function of time determined by
– e(0) - initial voltage across capacitor/resistor
– CR - time constant of system
• Note no external input so no forced response!
11
12
(2)
(3)
(4)
(5)
More on forced response
• If “initial conditions” are zero, it turns out that
yF REE (t) =
Z 0
−∞
g(τ )u(t − τ )dτ = 0
for all t > 0.
• Hence, can disregard this in computing response system after t = 0
i.e.
y(t) = yF ORCED (t) =
Z t
0
g(τ )u(t − τ )dτ
• This is equivalent to considering
– Motion of mechanical systems “at rest”
– Electrical systems with no initial voltages across/currents through circuit elements.
13