Application Note: Virtex-5, Virtex-4, and Spartan-3 Generation Devices
R
XAPP863 (v1.0) June 1, 2007
Using Digitally Controlled Impedance:
Signal Integrity vs. Power Dissipation
Considerations
Author: David Banas
Summary
On-die termination (ODT) promises higher signaling rates for printed circuit board (PCB) interchip interfaces through improved signal integrity. However, when using ODT, there is
sometimes an associated power penalty. This application note explains the reason for the
power penalty and suggests a simulation technique for comparing the signal integrity and
power dissipation of internally and externally terminated versions of an interface. The
termination architecture that is most appropriate to a product’s requirements can be chosen
intelligently in advance, thus saving valuable engineering design cycles.
Introduction
With the advent of Digitally Controlled Impedance (DCI) in Xilinx FPGAs comes the promise of
implementing higher speed interfaces through superior Signal Integrity (SI) as well as reduced
Bill of Materials (BOM) part count and, therefore, lower production cost in electronic designs.
However, DCI (often referred to as ODT in electronic trade publications and component data
sheets) should not be considered a panacea for every electronic design challenge. Like most
aspects of engineering, DCI represents an inherent compromise between two or more
desirable goals, and its use must be evaluated in a system-level architectural analysis to decide
whether DCI should be used in any particular design.
This application note begins by introducing the concept of SI quantification, which allows signal
quality to be expressed in a less qualitative, more meaningful way. It then shows how to
calculate input/output (I/O) power dissipation (PD) for several common circuit topologies in both
DCI and non-DCI cases. With these two pieces of information, intelligent choices can be made
regarding the system-level trade-offs between PD and SI. Finally, these techniques are applied
to two specific design examples that are typical of current electronic design activity: the
SSTL18 (see [Ref 1]) termination standards applied to DDR2 SDRAM address/control and
data lines.
SI
Quantification
A proper and conclusive evaluation of several different termination topologies requires their
behavior to be described quantitatively. This section discusses one way of doing this.
Eye Diagram Construction
Eye diagrams are used to analyze the quality of interfaces because they provide an aggregate
view of the interface’s performance. The interface cannot be designed to perform well for only
a single bit in a particular data stream. Rather, it must be ensured to perform well for every bit
of any data stream (subject to the design limitations of the chosen interface). The aggregate
signal represented in the eye diagram is an ideal vehicle for achieving this goal and so is used
exclusively in this work.
Eye Diagram SI Metrics
It is necessary to define and justify the SI metrics to be applied to the measured eye diagrams.
The following three metrics of eye diagram quality are used in this application note.
© 2007 Xilinx, Inc. All rights reserved. All Xilinx trademarks, registered trademarks, patents, and further disclaimers are as listed at http://www.xilinx.com/legal.htm. PowerPC is a
trademark of IBM Inc. All other trademarks and registered trademarks are the property of their respective owners. All specifications are subject to change without notice.
NOTICE OF DISCLAIMER: Xilinx is providing this design, code, or information "as is." By providing the design, code, or information as one possible implementation of this feature,
application, or standard, Xilinx makes no representation that this implementation is free from any claims of infringement. You are responsible for obtaining any rights you may require
for your implementation. Xilinx expressly disclaims any warranty whatsoever with respect to the adequacy of the implementation, including but not limited to any warranties or
representations that this implementation is free from claims of infringement and any implied warranties of merchantability or fitness for a particular purpose.
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
1
R
SI Quantification
Overshoot/Undershoot
This is a measure of the extent to which the maximum and minimum voltages recorded in the
eye fall outside the I/O cell’s power supply range, 0–VCCO, or 0–1.8V for the two specific design
examples used later in this application note. This metric is an important characteristic of the
signal impinging upon an input. Input voltages that lie too far outside the power supply range
can damage gate oxides and/or cause increased system PD due to increased average
protection diode current flow. This application note reports overshoot/undershoot margin to
remain consistent with the other two metrics for which higher positive numbers imply a better
eye.
Eye Width at Switching Thresholds
This is a measure of the duration in time during which the voltage at an input lies either above
the minimum High input level or below the maximum Low input level, whichever is shorter. This
metric is an important characteristic of the signal impinging upon an input; it determines how
much timing margin is available to accommodate such things as clock jitter/skew, signal skew,
input buffer delay variation, etc., while still allowing for correct data capture.
Minimum Headroom Due to Ringback
This metric is a measure of the vertical clearance between the switching threshold and the
point of maximum negative reflection in the data valid window. It is an important characteristic
of the signal impinging upon an input because it determines how much voltage margin is
available to accommodate noise while still allowing for correct data capture.
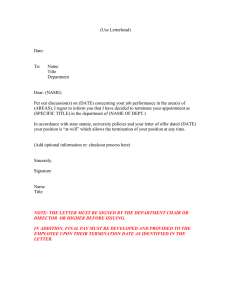
Figure 1 illustrates these three eye metrics and was generated by simulating an unterminated
Virtex™-5 SSTL18_II 1 ns delay link in HyperLynx. As shown, the performance of such a link is
very poor. The horizontal yellow lines represent the input switching thresholds for this standard.
The bottom reference for the overshoot measurement is VCCO, which is 1.8V for this I/O
standard.
XAPP863_01_052307
Figure 1: Sample Eye Showing Three Chosen Metrics
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
2
R
Power Dissipation Calculations
Power
Dissipation
Calculations
This application note is only concerned with those components of system PD that change
depending upon whether or not DCI is used. Therefore, all internal switching currents are
ignored when calculating PD, and instead, only the currents flowing through the following
components are considered:
•
I/O totem pole transistors
•
External termination network
•
Internal DCI termination network, when enabled
•
Any capacitive loads driven
Furthermore, the PD analysis is divided into the following two categories:
•
The static (DC or quiescent) power dissipated due to the continuous current that flows
through the termination network (external or internal) when the output has settled into its
new state.
•
The dynamic (AC or active) power dissipated due to the transient current that must flow
immediately after the output switches state in order to charge any capacitance attached to
the output node to the new steady-state level.
Static vs. Dynamic I/O Power Dissipation
Because the static PD is a function only of the average DC voltage level of the output and of the
DC characteristics of the particular termination network chosen, it is not frequency dependent.
While this is not strictly true (it ignores the effect of finite rise and fall times), the distinction
being made between static and dynamic power dissipation remains valid. The dynamic PD,
however, is frequency dependent since it must charge and discharge the output node
capacitance through the output voltage range with every cycle of the output state. To show the
frequency dependence of the results, it is necessary to differentiate between the static and
dynamic PD.
The static PD is easily calculated by taking the average of the power dissipation due to the
effective resistance of the termination network that occurs for the High and Low output states.
It is assumed, for the sake of simplicity, that the output spends an equal amount of time in its
High and Low states.
Calculating the dynamic PD is more complicated. [Ref 2] provides a detailed treatment of this
topic. Equation 1 is taken from [Ref 2] and gives the dynamic power, P, dissipated by a driver
connected to a capacitive load, which is being continually charged and discharged over the full
extent of the power supply voltage range:
P = f×C×V
2
Equation 1
Where:
f
=
cycling frequency of the load capacitor (fclk/2 for randomly changing DDR data
lines; fclk/4 for SDR data lines)
C
=
capacitance of the load capacitor
V
=
output driver’s supply voltage (VCCO in this case)
However, Equation 1 overestimates the dynamic power dissipated when the capacitive load is
not being charged and discharged through the full supply voltage range, as is the case with the
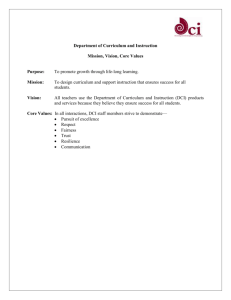
specific examples considered later. Figure 2 shows an output driver stage driving a capacitive
load.
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
3
R
Power Dissipation Calculations
VCCO
VCCO
ICHARGE
VDS
C
C
VDS
IDISCHARGE
XAPP863_02_050807
Figure 2: Schematic Showing Charge and Discharge of Capacitive Load
A typical drive cycle proceeds as follows:
1. At time t = 0, the upper transistor turns on and the lower transistor turns off. Also at this
time, the voltage across the capacitor is V1.
2. Current flows from the VCCO supply through the upper transistor into the capacitor,
gradually charging it to some final voltage, V2.
3. At time t = T/2, the upper transistor turns off and the lower transistor turns on.
4. Current now flows out of the capacitor through the lower transistor into ground, discharging
the capacitor to voltage V1 at time t = T, at which point the cycle begins again.
The power dissipated by the upper and lower transistors during the charging and discharging
phases of the cycle is calculated as follows. Taking the charging phase first, at any time, t, the
voltage across the upper transistor is given by Equation 2.
Equation 2
V DS ( t ) = V CCO – V C ( t )
The instantaneous power dissipated by the upper transistor is given by Equation 3.
Equation 3
P ( t ) = V DS ( t ) × I ( t )
So, the increment of energy dissipated by the transistor can be defined by Equation 4 as:
dE (charge ) = P (t )dt = V DS (t ) ×I (t )dt
= [ V CCO – V C ( Q C ) ] dQ C
Equation 4
= [ V CCO – V C ] ×CdV C
Where the independent variable has changed from t to QC and then to VC. Equation 5
integrates the energy differential over the voltage range of interest to give the total energy
dissipated by the upper transistor during the charging phase of the cycle.
V2
∫
E (charge ) = C V CCO dV C –
V1
V2
∫
2
2
V2 – V1
V C dV C = C V CCO ( V 2 – V 1 ) – -----------------------2
Equation 5
V1
The energy dissipated by the lower transistor during the discharging phase of the cycle is given
by Equation 6:
dE ( discharge ) = VC (Q C ) × ( – dQ C ) = – C ×VC dVC
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
Equation 6
4
R
Power Dissipation Calculations
Where the sign inversion on dQC is necessary to accommodate the fact that energy dissipated
in the lower transistor is accompanied by a reduction in the charge stored in C. Equation 7
integrates dE to give:
V1
E (discharge ) = – C
2
2
2
2
V1 – V2
V2 – V1
VC dVC = – C ×------------------------- = C ×------------------------2
2
∫
Equation 7
V2
Equation 5 and Equation 7 are added to get the total energy dissipated per charge/discharge
cycle as shown in Equation 8.
E CYC = C × V CCO × ( V 2 – V 1 )
Equation 8
Multiplying ECYC by the cycle repetition rate gives the average dynamic power dissipation
(Equation 9) for any arbitrary values of High and Low settling voltages:
Equation 9
P DYNAMIC = f × C × V CCO × V DCpp ( in )
Where VDCpp(in) is the DC peak-to-peak voltage swing at the receiver’s input node, i.e., the
peak-to-peak voltage swing ignoring any switching transient ringing. Setting VDCpp(in) equal to
VCCO reduces Equation 9 to Equation 1, which is correct.
Direct vs. Thevenin Equivalent Termination
When parallel terminating the receiving end of a transmission line resistively, two basic
topologies tend to be used in the majority of real-world design examples: direct and Thevenin
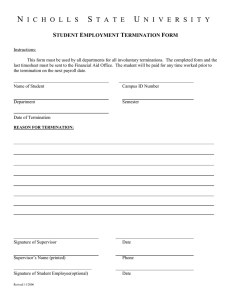
equivalent. These two termination schemes are depicted schematically in Figure 3. Both
schemes use series termination at the driving end of the line.
Vt1
0.9V
Direct
R1
U1.1
50Ω
R4
U2.1
TL1
20Ω
Virtex-5
SSTL18_I
50Ω
1 ns
Simple
Lsw01
Virtex-5
SSTL18_I
VCC
1.8V
Thevenin Equivalent
R2
U3.1
100Ω
R5
U4.1
TL2
20Ω
Virtex-5
SSTL18_I
50Ω
1 ns
Simple
Lsw03
R3
Virtex-5
SSTL18_I
100Ω
XAPP863_03_052307
Figure 3: Direct vs. Thevenin Equivalent Termination
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
5
R
Power Dissipation Calculations
Both termination schemes shown in Figure 3 present the incoming switching transients with an
effective termination of 50Ω to 0.9V. The SI at the inputs of U2 and U4 are, therefore, expected
to be the same, and the two waveforms are plotted in Figure 4. The plots in Figure 4 show the
eyes predicted by HyperLynx for the signals at the inputs of receivers U2 and U4, when probed
at the die, and when the two drivers, U1 and U3, are set to produce a 27 PRBS pattern at
800 Mb/s.
1800.0
1600.0
1400.0
Voltage (nV)
1200.0
1000.0
800.0
600.0
400.0
200.0
V [U4.1 (at die)]
V [U2.1 (at die)]
0.0
200.0
600.0
1000.0
1400.0
1800.0
2200.0
Time (ps)
XAPP863_04_050807
Figure 4: Superimposed Eyes Showing Equivalent SI for
Direct and Thevenin Termination
As shown in Figure 4, both direct and Thevenin equivalent termination yield the same SI at the
receiver’s input, as expected. This does not imply that external and internal (i.e., DCI)
termination provide the same SI. Other differences between external and internal termination,
besides topology, affect SI (see “Example 1: SSTL18 Class I”).
The dynamic PD is the same for both termination schemes because they are both driving the
same capacitive load. The High and Low state static PD for the directly terminated case is
straightforward and is obtained by calculating the current flowing through the 50Ω termination
resistor (because no current flows into the receiver input in the non-DCI case) and multiplying
that current by the total voltage drop through which it falls, which is 0.9V
(VCCO – VCCO/2 = VCCO/2 = 0.9V) in either case. It is necessary to include the entire voltage
drop that the current falls through, including the drop across the output driver’s pass transistor
and the 20Ω series termination resistor, in order to calculate the total power dissipated. In
general, average static power dissipation is given by Equation 10:
CCO⎞ ⎛ V CCO
⎛ V ( hi ) – V
-------------- + --------------- – V IN ( low )⎞
IN
V CCO 1 ⎝
⎠
2 ⎠ ⎝ 2
P STATIC (Direct ) = --------------- × --- --------------------------------------------------------------------------------------------------------Z0
2
2
Equation 10
V CCO
= --------------- ×V DCpp ( in )
4Z 0
Where Z0 is the characteristic impedance of the transmission line (and, therefore, assuming the
line is terminated properly, the termination resistance). Equation 10 actually gives the worst-
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
6
R
Power Dissipation Calculations
case bound on average static power dissipation because it ignores the finite rise and fall times
of the input signal, which tend to reduce average static power dissipation.
For the Thevenin equivalent case, the total power is obtained by adding the power dissipated by
the three components that draw current; namely, the top and bottom parallel termination
resistors (R2 and R3 in Figure 3) and the on transistor in the driver output’s totem pole (the
upper PMOS transistor in the High case, and the lower NMOS transistor in the Low case). This
is shown schematically in Figure 5, which is similar to Figure 3 except that U3 is replaced with
a schematic depiction of its output totem pole structure. The High case has been shown in
Figure 5.
VCC
1.8V
IR2
R2
ITRAN
100Ω
R5
U4.1
TL2
20Ω
50Ω
1 ns
Simple
Lsw01
R3
100Ω
Virtex-5
SSTL18_II
IR3
XAPP863_05_050707
Figure 5: Schematic for Deriving Thevenin Static Power Dissipation
Solving for the general case yields equations in terms of VCCO, Vin, and Z0. The power
dissipated by the two termination resistors, R2 and R3, in the High case is given by Equation 11
and Equation 12, respectively.
2
2
( V CCO – V IN ( hi ) )
V = -----------------------------------------------P STATIC_R2 ( hi ) = -----R
2Z 0
2
Equation 11
2
V CCO – 2V CCO V IN ( hi ) + V IN ( hi )
= -------------------------------------------------------------------------------------------2Z 0
2
V in ( hi )
P STATIC_R3 ( hi ) = -------------------2Z 0
Equation 12
The power dissipated by the on transistor and its series terminator, R5, is obtained by first
determining what current is flowing through them, and then using P = VI to determine their total
PD. P = V2/R cannot be used because the transistor’s on resistance is unknown and is not
constant. To determine the current flowing through the on transistor and R5, it is seen that
(Equation 13):
I R3 = I R2 + I TRAN
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
Equation 13
7
R
Power Dissipation Calculations
That is, the current flowing through the upper totem pole transistor adds to the current flowing
through the upper resistor in the termination network and the resultant total current is what
flows through the lower resistor. Furthermore, it is known that IR2 and IR3 are given by
Equation 14 and Equation 15, respectively.
V CCO – V in ( hi )
I R2 = --------------------------------------2Z 0
Equation 14
V in ( hi )
I R3 = ----------------2Z 0
Equation 15
Rearranging Equation 13 gives Equation 16:
2V in ( hi ) – V CCO
I TRAN = I R3 – I R2 = ------------------------------------------2Z 0
Equation 16
and Equation 17:
2V in ( hi ) – V CCO
P STATIC_Qon + R5 ( hi ) = V × I = ( V CCO – V in ( hi ) ) × ------------------------------------------2Z
0
2
Equation 17
2
– V CCO – 2V in ( hi ) + 3V CCO V in ( hi )
= -------------------------------------------------------------------------------------------------2Z 0
Adding Equation 11, Equation 12, and Equation 17 gives the total static PD in the Thevenin
equivalent case for the High state (Equation 18).
P STATIC ( Thevenin_hi ) =
= P STATIC_R2 ( hi ) + P STATIC_R3 ( hi ) + P STATIC_Qon + R5 ( hi )
2
2
2
2
V CCO – 2V CCO V in ( hi ) + 2V in ( hi ) – V CCO – 2V in ( hi ) + 3V CCO V in ( hi )
= ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------2Z 0
Equation 18
V CCO V in ( hi )
= --------------------------------2Z 0
This result could have been easily determined by noticing that all the current in Figure 5 flows
through R3 and experiences a voltage drop equal to VCCO. Equation 19 provides a similar
analysis for the Low case.
V CCO ( V CCO – V in ( low ) )
P STATIC ( Thevenin_low ) = ---------------------------------------------------------------2Z 0
Equation 19
Equation 20 gives the average static PD in the Thevenin equivalent case.
P STATIC ( Thevenin_hi ) + P STATIC ( Thevenin_low )
P STATIC ( Thevenin ) = ------------------------------------------------------------------------------------------------------------------------------------------2
2
2
V CCO
V CCO + V CCO × V DCpp ( in ) V CCO
= ------------------------------------------------------------------------- = ------------------ + -------------- × V DCpp ( in )
4Z 0
4Z 0
4Z 0
Equation 20
Comparing Equation 10 and Equation 20 confirms that the average static power dissipated in
the Thevenin equivalent case should be greater than that in the directly terminated case by
exactly the power dissipated by the two termination resistors, R2 and R3, being placed across
the power supply rails. Substituting the particular values for VCCO, Vin, and Z0 into Equation 10
and Equation 20 gives Equation 21 and Equation 22, respectively.
P STATIC ( Direct ) = 8.1 mW
Equation 21
P STATIC ( Thevenin ) = 24.3 mW
Equation 22
Equation 21 and Equation 22 show that a 200% static power penalty is incurred for choosing
the Thevenin equivalent style termination scheme for this particular I/O standard and circuit
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
8
R
Power Dissipation Calculations
topology. The significance of this penalty is unknown until the ratio of static PD to total PD (i.e.,
Total PD = static PD + dynamic PD) is determined.
Assuming that the receiver has 10 pF of input capacitance and that the link is running at
800 Mb/s (i.e., fCLK = 400 MHz) as shown in Figure 4, then, inferring a value of 0.9V for
VDCpp(in) from Figure 4 and referring to Equation 9, the dynamic PD is given by Equation 23:
P DYNAMIC = 200 MHz × 10 pF × 1.8V × 0.9V = 3.24 mW
Equation 23
Which is the same for either termination scheme. Combining this result for the dynamic PD with
the static PD results for direct and Thevenin equivalent termination, respectively, gives the total
PD for both termination schemes (Equation 24 and Equation 25).
P TOTAL ( Direct ) = P STATIC ( Direct ) + P DYNAMIC
P TOTAL ( Thevenin ) = P STATIC ( Thevenin ) + P DYNAMIC
Equation 24
Equation 25
This yields 11.3 mW and 27.5 mW for the total PD in the direct and Thevenin equivalent cases,
respectively. From a total PD perspective, the actual penalty for using Thevenin equivalent
termination is an additional 143%, which is a severe penalty but not as severe as a static PD
analysis alone would have been. In addition to increasing the total PD over that of the
externally, directly terminated case, all of the PD is moved inside the FPGA.
There are three main reasons to use the Thevenin equivalent termination style:
•
Sometimes, using an asymmetric split termination is the only way a line can be properly
terminated while still providing a sufficient voltage swing at the receiver’s input.
•
When DCI is chosen as an alternative to external termination components, the choice of
termination style is relinquished and the style is dictated by the DCI topology for a
particular I/O standard. In the case of the two standards used here as examples, that style
is Thevenin equivalent.
•
Sometimes, it is cost prohibitive to include a direct termination voltage source in a design.
Finally, Figure 6 shows how the total PD comparison between direct and Thevenin equivalent
termination schemes varies as a function of data bit rate.
The data is synthesized simplistically. The value of f in Equation 9 ranges from 2.5 MHz to
2,500 MHz, and it is incorrectly assumed that this does not change the value of VDCpp(in). The
plot thus generated in Figure 6 is not very accurate.
70.00
60.00
Ptot_dir (mW)
Ptot_Thew (mW)
Power (mW)
50.00
40.00
30.00
20.00
10.00
0.00
10
20
50
100
200
500
1000
2000
5000
10000
Bit Rate (Mb/s)
XAPP863_06_050207
Figure 6: Total Power Dissipation Comparison for Direct vs. Thevenin Termination
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
9
R
Example 1: SSTL18 Class I
At bit rates below about 1 Gb/s, the PD difference between the Thevenin equivalent and direct
termination styles is fairly constant and represents a significant power penalty when considered
relative to the total PD.
Example 1:
SSTL18 Class I
The first example is a DDR2 SDRAM address/control line using SSTL18 Class I signaling and
includes a comparison of the SI and PD of several different topologies. The schematic used to
run the simulation in HyperLynx is shown in Figure 7. The transmission lines are assumed to be
six inches of FR4 at 180 ps/in. A 0.9V supply rail is also provided so that direct external
termination can be used. If this supply rail had not been provided, no power penalty would have
been paid for using DCI termination since direct external termination would not have been
available as an option. That is, external termination would have to be Thevenin equivalent as
well.
Vt1
0.9V
R1
Case 1
50Ω
U1.1
U2.1
R4
TL1
20Ω
Virtex-5_FF1136
SSTL18_I
50Ω
1.080 ns
Simple
Virtex-5_FF1136
SSTL18_I
Case 2
U4.1
U3.1
TL2
50Ω
1.080 ns
Simple
Virtex-5_FF1136
SSTL18_I_DCI_O
Virtex-5_FF1136
SSTL18_I_DCI_I
Case 3
U5.1
U6.1
R5
TL3
20Ω
Virtex-5_FF1136
SSTL18_I
50Ω
1.080 ns
Simple
Virtex-5_FF1136
SSTL18_I_DCI_I
XAPP863_07_052307
Figure 7: Topologies Compared for SSTL18_I
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
10
R
Example 1: SSTL18 Class I
Case 1 and Case 2 correspond to the Xilinx external and DCI recommended use models,
respectively, given in [Ref 3] (see the SSTL18 Class I (1.8V) section). Case 3 is a hybrid
consisting of external series termination at the driver combined with DCI parallel termination at
the receiver.
Figure 8, Figure 9, and Figure 10 show the eye patterns at the inputs of receivers U2, U4, and
U6, respectively. The simulation is configured as follows:
•
standard eye, with:
♦
27 PRBS, initially High
♦
2.5 ns bit period
♦
1 pattern repetition
♦
first 8 bits (i.e., 20 ns) skipped
♦
0 added jitter
•
slow-weak IC modeling (FF1136 package. This causes HyperLynx to use the worst-case
package models.)
•
probes located at die
The corresponding metrics are tabulated in Table 1.
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
11
R
Example 1: SSTL18 Class I
XAPP863_08_050707
Figure 8: Eye at U2 - Case 1
XAPP863_09_050707
Figure 9: Eye at U4 - Case 2
XAPP863_10_050707
Figure 10: Eye at U6 - Case 3
Table 1: Metrics for SSTL18_I Eye Diagrams
Case
Type
Width at Threshold (ns)
Headroom from Ringback (mV)
Overshoot Margin (mV)
1
External
2.20
219
415
2
DCI
2.06
225
373
3
Hybrid
2.10
265
429
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
12
R
Example 1: SSTL18 Class I
The eyes for Case 1 and Case 2 (i.e., the waveforms in Figure 8 and Figure 9) appear very
different than the eye in Figure 4. It was the intent of Figure 4 to show that a Thevenin
equivalent termination produces an eye that is identical to that produced by its direct
termination counterpart, all other things being equal. There are two main reasons for the
difference:
•
When using DCI (i.e., Case 2 and Figure 9), the termination is provided by active devices
that are nonlinear and exhibit effective impedances that have a larger tolerance than the
typical resistors used for external termination. This larger tolerance results in an
impedance mismatch at the ends of the transmission line that is worse than in the
externally terminated case and varies with the voltage at the end of the line.
•
When the source series termination (i.e., R4 of Case 1 in Figure 7) is pulled inside the
driver IC as in Case 2, the transmission line becomes directly exposed to the parasitic
capacitance of the driver output. Thus, any energy reflected from the receiver has to see
that capacitance before it passes through the source series termination. Consequently,
the high frequency components of that reflected energy are reflected back toward the
receiver rather than being damped along with the low frequency components as in Case 1.
The removal of the resistive isolation between the transmission line and the parasitic
capacitance of the driver output when using DCI at the driver effectively creates a
completely unterminated line at high frequencies. This is due to the low impedance
exhibited by the parasitic capacitances at both ends of the line at high frequencies.
The total PD is given by Equation 24 for Case 1 and by Equation 25 for Case 2 and Case 3.
SSTL18_I/II_DCI inputs use a Thevenin equivalent topology. PSTATIC(Direct),
PSTATIC(Thevenin), and PDYNAMIC are given by Equation 10, Equation 20, and Equation 9,
respectively. VCCO = 1.8V, f = 100 MHz (the address/control lines are SDR and a 50%
probability of switching is assumed), and Z0 = 50Ω throughout. C is the total capacitance
formed by the driver output capacitance (given by CCOMP in the IBIS file as 6 pF), the total
transmission line capacitance (τ/Z0 = 21.6 pF), and the receiver input capacitance (also given
by CCOMP as 6 pF), and equals 33.6 pF. VDCpp(in) is inferred from the plots in Figure 8,
Figure 9, and Figure 10.
The numbers given in Table 2 and Table 3 for the various SI metrics, the total PD, and the PD
breakdown by component can now be used to select the best link topology for any particular
application.
Table 2: Power Dissipation for Three Class I Cases
Case
VDCpp(in) (V)
PSTATIC (mW)
PDYNAMIC (mW)
Total Power (mW)
1
0.80
7.2
4.84
12.0
2
0.96
24.8
5.81
30.6
3
0.90
24.3
5.44
29.7
Table 3: Power Dissipation Breakdown by Component
Case
PDRVR_IC (mW)
PEXT_TERM (mW)
PRCVR_IC (mW)
1
5.06
6.98
0
2
9.81
0
20.8
3
5.66
3.78
20.3
Notes:
1.
Numbers are based on an estimate of 30Ω for non-DCI driver output impedance.
The hybrid model provides an attractive alternative when little room is left to increase driver
power dissipation. In the specific example discussed here, when the hybrid model is chosen,
the driver power dissipation is increased by only 12% and superior performance in both the
Headroom from Ringback and Overshoot Margin SI metrics is gained. Only 5% of the Width at
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
13
R
Example 2: SSTL18 Class II
Threshold is sacrificed compared to the externally terminated case. A 148% penalty in total
power dissipation is incurred for the link when using the hybrid model as compared to the
externally terminated case, which offers the lowest total power dissipation.
Example 2:
SSTL18 Class II
A typical data line of the same DDR2 interface using SSTL18 Class II signaling as well as the
SI and PD of several different topologies is considered. Two of these topologies correspond to
the Xilinx recommended use models for the external and DCI termination schemes and the
third is a hybrid of the previous two (see SSTL18 Class II (1.8V) section in [Ref 3]). The
schematic used to run the simulation in HyperLynx is shown in Figure 11.
Vt1
0.9V
Vt1
0.9V
R8
R1
Case 1
50Ω
U1.1
50Ω
R4
R7
U2.1
TL1
20Ω
50W
900 ps
Simple
Lsw01
Virtex-5
SSTL18_II
20Ω
Virtex-5
SSTL18_II
Case 2
U4.1
U3.1
TL2
50Ω
900 ps
Simple
Lsw03
Virtex-5
SSTL18_II_DCI_O
Virtex-5
SSTL18_II_DCI_I
Case 3
50Ω
U5.1
U6.1
R5
TL3
20Ω
Virtex-5
SSTL18_II
50Ω
900 ps
Simple
Lsw05
Virtex-5
SSTL18_II_DCI_I
XAPP863_11_052307
Figure 11: Test Case Topologies for SSTL18 Class II
Figure 12, Figure 13, and Figure 14 show the eye patterns at the inputs of receivers U2, U4,
and U6, respectively. The simulation configuration is identical to the previous case with the
following exceptions:
•
1.25 ns bit period
•
first 16 bits (i.e., 20 ns) skipped
The eye metrics are given in Table 4.
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
14
R
Example 2: SSTL18 Class II
XAPP863_12_050707
Figure 12: Eye at U2 - Case 1
XAPP863_13_050707
Figure 13: Eye at U4 - Case 2
XAPP863_14_050707
Figure 14: Eye at U6 - Case 3
Table 4: Metrics for SSTL18_II Eye Diagrams
Case
Type
Width at Threshold (ps)
Headroom from Ringback (mV)
Overshoot Margin (mV)
1
External
780
167
434
2
DCI
947
227
300
3
Hybrid
902
195
390
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
15
R
Reference Design
Power dissipation calculations for these three Class II cases are explained here on a case by
case basis. In all cases, f = 200 MHz since these are data lines (DDR) and toggle at twice the
rate of address/control lines. The values of C and VCCO are the same as in the previous case,
and the values for VDCpp(in) are inferred from the plots in Figure 12, Figure 13, and Figure 14.
•
Case 1 and Case 2 can be handled simply by substituting 25Ω for Z0 in Equation 10 and
Equation 20, respectively. Reducing Z0 by a factor of two doubles each of the additive
terms in Equation 10 and Equation 20, and therefore, simultaneously accounts for the two
50Ω terminations in parallel as well as an extra Thevenin correction factor (i.e., the
additive VCCO2/4Z0 factor in Equation 20). This correction factor is required because the
parallel termination at the driver output is also Thevenin equivalent in the DCI case
(Case 2).
•
Case 3 requires that 50Ω is used for the first Z0 in Equation 20 and 25Ω is used for the
second. Even though one Thevenin correction is needed, there are still two
50Ω terminations in parallel.
The results are given in Table 5 and Table 6.
Table 5: Power Dissipation for Three Class II Cases
Case
Type
VDCpp(in) (V)
PSTATIC (mW)
PDYNAMIC (mW)
Total Power (mW)
1
External
0.74
13.3
8.95
22.3
2
DCI
0.98
45.7
11.9
57.6
3
Hybrid
0.82
29.5
9.92
39.4
Table 6: Power Dissipation Breakdown by Component
Case
Type
PDRVR_IC (mW)
PEXT_TERM (mW)
PRCVR_IC (mW)
1
External
4.21
18.0
0
2
DCI
36.6
0
21.0
3
Hybrid
4.55
15.3
19.6
Notes:
1.
Numbers are based on an estimate of 10Ω for non-DCI driver output impedance.
Table 6 shows the trade-off between SI and PD. Moving from the externally terminated case
through the hybrid model to the full DCI case, SI gets consistently better while PD increases
steadily. Minimal weighting is given to the overshoot margin metric when assessing overall SI
quality since there is 300 mV in even the worst case. The hybrid model can be very useful in
cases where the improved SI of the DCI model is desired, but little margin is left to increase the
driver power dissipation. In fact, the hybrid model also saves appreciably on total power
dissipation for the link. The recommended-use models are taken from the generic Virtex-5 user
guide ([Ref 3]). A more accurate representation of the current state-of-the-art in Xilinx memory
interface design can be found in [Ref 4] and [Ref 5].
Reference
Design
The reference design package, including HyperLynx simulation schematics, is available on the
Xilinx website at: http://www.xilinx.com/bvdocs/appnotes/xapp863.zip.
Conclusion
This application note discusses the general means for quantitatively assessing both the signal
integrity and the power dissipation of data transmission lines terminated with two of the most
common methodologies in use today: direct and Thevenin equivalent termination. These
general techniques are applied to two specific examples that are common to one of the most
ubiquitous interface technologies today: DDR2 memory interfaces using SSTL18_I/II signaling
standards. The signal integrity and power dissipation of several different candidate topologies
XAPP863 (v1.0) June 1, 2007
www.xilinx.com
16
R
References
are compared for each example, including cases that make use of DCI. A hybrid approach
using external termination at one end of the link and DCI termination at the other often provides
the best compromise; however, the decision of which topology to use must be made separately
for each design based upon particular design priorities.
References
1. JEDEC. 2003. Stub Series Terminated Logic for 1.8V (SSTL_18), JESD8-15A. JEDEC
Solid State Technology Association.
http://www.jedec.org/download/search/JESD8-15a.pdf
2. Johnson, Howard and Martin Graham. 1993. High-Speed Digital Design, A Handbook of
Black Magic. Prentice Hall PTR.
3. UG190, Virtex-5 User Guide
http://direct.xilinx.com/bvdocs/userguides/ug190.pdf
4. UG079, Virtex-4 ML461 Memory Interfaces Development Board User Guide
http://www.xilinx.com/bvdocs/userguides/ug079.pdf
5. UG199, ML561 Memory Interfaces Development Board User Guide
http://www.xilinx.com/bvdocs/userguides/ug199.pdf
Revision
History
XAPP863 (v1.0) June 1, 2007
The following table shows the revision history for this document.
Date
Version
06/01/07
1.0
Revision
Initial Xilinx release.
www.xilinx.com
17