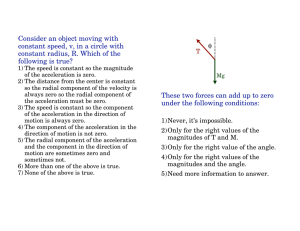
1 An object is moving along a circular path of radius r with a velocity
advertisement

Vf ∆r rf Vi ∆θ ri An object is moving along a circular path of radius r with a velocity that changes direction but has a constant magnitude so that: rf = ri and vf = vi ∆V Vi ∆θ Vf Since the velocity vectors are perpendicular to the position vectors the angle between the velocity vectors is the same as the angle between the position vectors as shown in the second figure. The triangles shown in the figures are similar. If we let r = ri = rf and v=vi = vf we have: ∆v ∆r = v r ∆v ∆r = v r Multiplying this equation by v and dividing by ∆t gives: If we take the limit as ∆t 0 we obtain: radial acceleration dv v dr = dt r dt ∆v v ∆r = ∆t r ∆t ⇒ ar = v2 r velocity Direction of the Acceleration dv vf vi When the time interval ∆t is made very small the angle between vi and vf is also very small and the angle between dv and vi (or vf) is 90 degrees. Since v is parallel to the tangent to the circle, dv points towards the center of the circle. Since dv determines the direction of ar, the radial acceleration points towards the center of the path. 1 v Acceleration of an object in circular motion with constant speed. ar v at total acceleration ar Acceleration components of an object in circular motion and speeding up. The component at is the tangential acceleration component. v Acceleration components of an object in circular motion and slowing down. ar total acceleration at 2