Role of WeldinE Parameters in Determining the Geometrical
advertisement

/a
#
\-
R. Kovacevic
Z. N. Gao
Y. M.Zhang
and
forRobotics
Center
Systems,
Manufacturing
of KentuckY,
University
KY40506
Lexington,
1
in
Parameters
Roleof WeldinE
theGeometrical
Determining
of WeldPool
Appearance
A three-dimensional numerical model is developed to describe the fluidflow and heat
transfer in weld pools. Both full penetration and free deformation of th-e top and
bonim weld pooi surfaces aie considered. Temperature distribution and fluid flow
of welding para'meters on the
field are obtiined. Ii order to analyze the influence
"geometrical
appearance of weld pools, a normalized model is developed to ch'aracterappearance of weld pools. It is found that welding current can
ize the gro*iiirol
geornetrical shape. Wherywelding current increases, the curvathi
significintly affect
tire"oy thi piol bounbary at the trailing end increases. The effect of the welding
speed."onthi geometrical appearance is slight, althou,gh its influence on the pool size
ii great. In the interest ,iig" af arc length (from I y* to 4 mm), the arc length
cai offtct both the size andilrt ilrop" of the weld pool..However, cornpared with the
weldiig current and speed, its influences are muchweaker. GTAwelding experiments
op p"ilor*ed to verify the validity of the numerical models. The appeardnce of weld
pooi, ias obtained by using machine vision and a high-shutter speed camera- It is
good agreement with the experimental ones.
found that the calculated reiults have a
Introduction
A series of studies has demonstrated that the grain structure
of the weld metal plays a fundamental role in determining the
mechanical properties of the joint t1-31. Also, the microstrucnlre
of a weldment is primarily affected by the geometries of weld
jginldepend
pools
14-61. Th"s, the mechanical properties 9f the
^clirectly
on the geomefiry of the weld pool [7, 8]. In fact, the
solidification of the weld pool metal is usually considered to be
anucleation and growth process. The nucleation is first formed on
the solid-liquid interface. Then, grains grow along the maximum
temperaturJ gradient direction, i.e., along the direction normail to
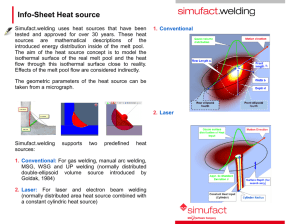
the weld pool bouodary. As shown in'Fig- l(a), at low heat
inputs and welding speeds, the weld pool becomes elliptical in
.fiup", and, therefoie, the columnar grains grow along thewelding
direction. At high heat inputs and welding speeds, on the other
hand, a teardropshaped weld pool forms and the resulting columnar grains are-straight, as illusffated in Fig. I(b).Therefore,
welding parameters can affect the grain structure of the weld
metal *pbugh its influence on the geometry of the weld pool.
Hence, in oider to acquire the desired mechanical properties, the
roles of the welding parameters in determining the geometrical
of the weld pool must be studied.
appearance
ih" understanding of the roles will also play a fundamental part
in the weld penetration control which has been one of the major
research interests of the authors [9, 10]. It is known that the topside sensing and confiol of the weld penenation, which is specified
by the penetration depth and back-side bead width of the weld
pool for the partial and full penetration respectivelyt _1e among
ihe most important research issues in automated welding- However, both the penetration depth and back-side bead widttt can not
be directly viewed using topside sensors. Indirect methods, such
as pool oscillation and infrared sensing, have to be used. It is
known that the weld pool can provide abundant important information about the welding process. A skilled human operator can
estimate the weld penetration by observing the weld pool. However, the sensing of _theweld pool is difficult. As an altemative,
\-
-
CoitUord by theMaterialsDivisionfor publicationin theJounNeror ENcr-
Manuscript received by the Materials
NEERING MATERIAI5 aNo TrcHNoLocv.
1995 - AssociDivision June I I, 1995; revised manuscript received December 24,
ate Tecbnical Fditor: K. S. Chan.
Joumal of Engineering Materials and Technology
the authors have sensed and controlled the sag geomefiry behind
the weld pool [10]. Because of the recent dwelopment in the
sensing technology, cleat images of the weld pools have been
acquirJd using a fugh shutter speed camera assisted with pulsed
taser ittuminition [11]. A real-time image processing algorithm
has been developed to extract the geomeny of the weld pool online [12]. Based on numerous accurate measurements of the weld
pooii, if was found that the back-side bead width (status of the
hrll penetration) can be determined from the measured parameters
of the weld pool using a neural-network [13, 14]. In order to
acquire the desired weld penetration, the geomefiry of the weld
pool needs to be confrolled. Thus, the correlation between the
*"tOi"g parameters and geomeffical parameters of the weld pool
must be understood.
Our research interest has been focused on the critical root
pass where the full peneffation is usually required. Although
numerical models have been established to determine heat
**y
transfer and fluid flow in the weld pool [15-20], the fully
penetrated weld pools with free top and bottom surface have
not been addressed.In this study, the geometry of the weld pool
is characterized by the proposed parameters of the weld pool.
A three-dimensional-numerical model is developed to calculate
the fluid and heat ffansfer in the weld pool. Free top and bottom
surfdces are used in the numerical model. The experimental
verification of the numerical modelis done. Based on the calculated weld pools, the roles of the welding parameters in determining the geometry of the weld pool are analyzed'
2
Numerical Model of Wetd Pool
2.1 Governing Equations. In order to develop the nuis
merical model, *ri pricess is defined as follows. The arc
regarded as a spatiaily distribute{ -heat,current, and pressure
pool'
flux source.Heat 1,*rf* and fluid flow occurin the weld
for
The following uAaiiional assumptionshave been adopted
further simplification:
( 1) The flow is Newtonian, incompressible'and laminar'
have
(2) Heat,"uo"oq and pressuredistributionsof the arc
Gaussiancharacteristics.
(3) Physicalpropertiesare constant'
OCTOBER1996, Vol' 118 / 589
,1,
0u
- u o. &
)
a**' oy-
, 1, 'l
'I
:F,
.,
Au1
oz)
w - l
- K . r ( # . # . # () 3 )
; J. , r
;ii'!r:
rlil
,l*
Aw1
- u i. lAw 0w
a**, ar**a]
ii":,,:,
r$iij
:{.ll
iii;i
- F , - K . , ( # . # . #G
))
ii l,;
r;ii,i
Fig. 1 Effectof weldingparameterson grain structuret4]. (a) Low heat
iniut anOweldingspeel; (b) high heat input and weldingspeed'
It should be pointed out that when the pool surface is.significantly deformed, the heat, culTent, and pressure distributions
of the arc may not be exactly the Gaussian. However, in our
calculation, the maximum welding current is 160 A. The surface
deformation is not severe. Hence, the Gaussian distributions are
still used in our calculation.
In this study, the coordinate system (x, y, z) is attached to
the torch. The symmetric axis of the electrode is selected as the
- y
z axis. The work bottom surface is used to define the x
governing
The
x
axis.
the
along
travels
plane and the torch
iquations, described by the continuity equation, the momentum
e{uation, and the energy equation for quasi-steady state velocity
and temperature fields in the workpiece, may be written as
follows:
-0u + -0a + :0w
-:0
0x 0y 0z
ou
f
.au
ol(" - ui A**, Arn
-xl
NP
-
r a
^
'
ox
(1)
- u)K.,ff*-T,l
ec,lr,
(s)
. *,?T,)
: *(.T). &(.K)
where u, u, arrdil/fepresentthex, y , andz directionalvelocities,
respectively.uo is the welding speed,K-thermal conductivity,
7-temp-density,p-viscosity, Co-specific heat,P-pressure,
-and
of the body force.
components
F,are-the
und
Fy,
fout*".'F,,
'fn"
Uoay fot"" F is calculatedusing the electromagneticand
buoyancyforce l20l:
F:JxB-
P7SQ-T^)
(6)
WhereJistheculTentdensityvector,B.magneticinduction
vector, }-coefficient of volume expansion,g-gravitationalaccelerationvector, and L-melting temperature"
2.2 BoundarYConditions
(i) PooI Surface Deformation. The molten pool is distorted by the gravitationalforce and arc pressure.The surface
tensionicts to supportthe molten pool. For the arc-poolinterface, i.e., the top iool surface,the static force balancecan be
describedbY [21]:
r ( # . # . # )e )
Nomenclature
a, b : model parameters of geometrical apPearance of the
weld Pool
B : rragnetic induction vector
Co : sPecific heat
F,, Fy,4 : components of bodY force
g : gravitational acceleration
vector
.I: welding cunent
J : current densitY vector
K : thermal conductivitY
I : thickness of specimen
I : length of weld pool
leuap: latent heat for the liquid-vapor phase-change
rrt: evaporation mass rate
rla : ilormal unit vector to bottom surface
n, : norrnal unit vector to top
surface
P : liquid Pressure
Po: NC Pressure
59O / Vol. 118, OCTOBER 1996
econv: heat loss from convection
e",ap: heat loss from evaPoration
Qradt: heat loss from radiation
r : radial distance
7: temperature
Z- : melting temperature
7L : ambient temperature
t6" : tangential unit vector of bottom
surface parallel to x - e Plane
:
t6, ttngential unit vector of bottom
surface parallel to Y - z Plane
:
tangential unit vector of top surt*
face'parallel to .r - e Plane
:
tangential unit vector of top surto
face parallel to Y - e Plane
:
x-direction velocity
u
ttw : anc voltage
uo: welding speed
Va : velocity vector of bottom surface
Vr : velocity vector of toP surface
p : y-direction velocitY
,rs - Tdkection velocity
x, !, z: regular coordinate sYstem
x,, !, = normalized coordinate system
P ='viscosity
Po = lrltlglletic PermeabilitY
P : density
F : coefficient of volume exPansion
y = surface tension
0y l.0T : surface tension temperature coefficient
atc efficiencY
\:
o : Stefan-Boltzmann constant
oi : ztc current flux distribution parameter
oq: arc heat flux distribution Parameter
e : surface emittance
0 : shape function of toP Pool surface
ry' : shape function of bottom PooI
surface
Transactions of the ASME
P " - p g Q+ c
(b)
- z+,9,Q, + o
- -_v^.<t + o3>a*
_+JJ
(7)
\wherez : L - Q@,y) is the top pool surface,L is the material
thickness,7 is the surfacetension,aur.td
Q.: (0Q/0x),.4o:
(ALO/Ar2), etc. The arc pressureP, is determinedusing the
following formula I22l:
p o '(!x/., -Dg: e x p f - { # )
(8)
zo? /
4ro1---'\
where1is the welding culTent,oi-ulCcurrentdistributionpafameter,and ps-magnetiJpermeabiiity.Wtrenthe weld pool is fully
penetrated,the bottom pool surface is also deformed. On the
bottom pool surface,the surfacetensionpreventsthe weld pool
from being burnt-through. The balance between gravity and
surfacetensioncan be written as:
E
0
x
E
E
E
E
Ex O
*
.E
t
6
Xais(mm)
X-atis(mm)
Fig. 3 Comparisonbetween the numerical boundaryand normalized
one (- numerical,-- normalized).(a) 120A(b) 8OA.
tor of the top surface parallel to thex - zplane,tr-the tangential
- z plane, and'
unit vector of the top surface parallel to the y
tension.
The heat
the
surface
of
coefficient
07 tlT-temperature
loss due to convection, evaporation, and radiation can be written
as:
(lco,.,u:h(T-T*)
ps$+L-Q)-c
:
Qe',aP
: - y^.t
,
niw
/
expl
'\
2t r o' n
-'-
r'+y'\
= ;'
|
2oi /
-
Q",,.,,,
Qraai
-
Q.uap
whereA andB aretwo constantsdependingon theusedmaterial.
(iii)
Bottom*o!'*;r.,,6
-
(23)
(12)
Va'na = 0
(24)
(13)
where n6 is the normal unit vector of the bottom surface, V6velocity vector on the bottom surface, t6;the tangential unit
vector bf *re bottom surfaceparallel to x - z plane, and t6r-the
tangential unit vector of the bottom surface parallel to the y
e plane.
Front Surface.
(14)
-pv(v,'to)' n, :
( 1 s ) (v) Rear Surface.
V r' n , : 0
( 16)
where n, is the normal unit vector of the top surface, uw-atc
voltage, o q-archeat flux distribution parameter, \ -ffi c effi ciency,
V,-velocity vector on the top surface, to-the tangential unit vec-
v
Fig. 2
Normalized cootdinate system
Journal of Engineering Materials and Technology
(zL)
- FY(Y.'tur)'o,.u
:
#VT'tby
-pV(V,'to)'n, : yrYT'to
to
- e,.ai
-e"onu
(11)
(iv)
#,VT'
( le)
(22)
-KVT'n,
;-;
(18)
- FY(Yu'tr)' ou:
tb,
?rVT'
Top Surface.
:
f!)
(17)
where ft is the convectioncoefficient,o-Stefan-Boltzmanconstant, e-surfaceemittance, ?L-arnbienttemperature,Z"uup-latent
heat for the tiquid-vapor phase-change,and m-evapontton mass
rate. For a metal such as steel,m can be written as [23]:
( 20)
l og(m) - !- B IT - 0.5 l og Z
(10)
# Q@,y)dxdy ff,lt(*,y)dxdy:o
Equation (7) and Eq. (9) have the following boundaryconditions, respectively,
6(x, Y) : O, when T = T^
t(x, Y) : O, when T < T*
thL"uuP
Qruai: oe(Ta
(e)
: (0$/
wherez : - {(x,y) is the bottompool surface,and 111.
0x), {* : (Az{tlAx'), etc.Exactly speaking,the liquid in the
weld pool is compressible.However,in orderto avoid complexity, it hasfrequentlybeenassumedthat the liquid is incompressiUte.tn our calculation,this assumptionis also used so that the
differencebetweenthe liquid and solid densitiesis negligible.
Hence, the constant c can be determined from the following
constraintof constantvolume:
(ii)
'-5 1h s " i - 2 0 2
- € - 6 4 - 2 0 2
u:u=w:o
T:T-
(2s)
u,:"1):w:o
(27)
Ky:
oy
-{l"onu
(26)
(28)
3 Normalization of Weld PooI Geometry APPear'
ance
In order to study the geometry of the weld pool, the weld
pool must be characteriiedby parameters.Although the pool
iength and width could provide a rough descriptionof the geometxy,a more accuratedescription is preferred.
parametrig ryodel to deWe have proposed the following-thb
normalized coordinate
scribe ttre wetA^pool boundary in
systemx,o!, (Fig. 2) [14]:
(29)
!,:*a(L-x,)bx, (a>0, 1-b>O)
and
pool'
weld
the
wherex, : xll, y, : yl\l, / is the length of
(Fig'
3)
shown
been
Las
It
parametersinoaet
*i
i ia i'arc
OCTOBER1996, Vol. 118 / 591
Table L Farameters used in computation
C, : 630J/kg'K
ft : 80Wm2.K
K:22 Wm.K
L=3 x 10-3m
7L:300K
7,"= 1723K
ry= 0.65
p:6 x 1o-3kg/m.s
Fo = 1.26x 10-oFVm
p : 7200 kg/m3
0:lx1o-4K-'
y : i.0 N/m
0y/07 : -0.112 x I0-3 N/mK
that the geometry of the weld pool can be sufflciently characterized using the parameters /, a, artd b 1141. Also, the back-side
bead width can be accurately calculated using l, a, and b ll4f .
Thus, these parameters are used to characteize the geometry
of the weld pool.
4 Cornputational Results and Experimental Verifications
The governingequationswith the boundaryconditionsare
transformed into finite difference equations. In order to improve
the accuracy ofthe calculation,50 x 50 x 30 unevenly spaced
grids are used for the 50 x 30 x 3 mm calculational domain.
The minimum grid space was 0.4, 0.25, and 0.1 mm in the x-,
y-, and e-directions, respectively. Fine spacing was used in the
weld pool region because of the higher temperature gradient.
The finest spacing was used for the thickness-direction in order
to describe the deformed weld pool surface. The SMPLER
algorithm L24l is employed to calculate the temperature and
fluid flow fields. Different welding parameters have been used
in the calculation in order to analyze the effect of welding
parameters on the geometry of weld pools. It is known that
both on and on increase when the welding current or arc length
is increased. In our calculation, on ard oq are determined for
different welding current and arc length according to the experimental results [22). Calculations are made for GTA weld pools
on stainless steel (304) plates. The parameters used in the computation are shown in Table 1.
The calculated results of temperature distribution for partial
peneffation and full penetration are shown in Fig. 4 and Fig. 5,
respectively. In Fig. 4(a), (b) and Fig. 5(a), (b), melting
temperature is indicated using the dash-dot lines. The interval
of temperature between the two adjacent lines is 250"K. The
deformation of the top and bottom surfaces can be seen clearly.
The top surface of the molten metal is concave in the plasma
impacted region and is convex in the non-impacted region. The
bottom surface of the molten pool is entirely concave downward. In Fig. 4(c) , (d) nd Fig. 5 (c), (d), three-dimensional
temperature distributions on the top and bottom surfaces for
partial and full penetration are shown. On both the top and
bottom surfaces, there are temperature peaks, and the temperature gradient ahead of the moving arc is larger than that behind
the arc.
The calculated results of fluid flow in weld pools for partial
and full penetration are shown in Figs. 6 and 7.It can be seen
that in both partial and full penetration cases, there are similar
patterns of fluid flow in weld pools, i.e., except for the pool
edge, the molten metal on the surface flows radially outward
and moves vertically upwards in the neighborhood of the arc
axis. The maximum flow velocities are 0.62 mls in Fig. 6, and
0.69 m/s in Fig. 7. It is known that buoyancy norrnally plays
a less important role in determining the flow pattern than the
temperature coefficients of the surface tension and electromagnetic force l251.In our case, small currents, maximally 160 A,
were used and the electromagnetic force is therefore relatively
small. As a result, the pattern of convection in the weld pool is
mainly determined by the temperature coefficient of the surface
tension. That means that the geometrical appearanceof the weld
pool is also mainly determined by the temperature coefficient
of the surface tension. For stainless steel, the temperature coefficient of the surface tension on the pool surface is usually
negative. In this case, the highest surface tension is reached at
the solid-liquid interface, while the surface tension of the weld
pool at the arc center is the lowest. Consequently, the molten
metal flows outward from the a.rccenter. It can be seen that our
results are consistent with the experimental observations of the
eg
Ii
_-_Ti
? 4
'?2
I
\w
tii s
interval:250K
N 0
2
-15
5
X-axis (mm)
5
at f:Q
(a)
?r
6
x t
I
N
0
0
Y-a:cis (mm)
(b)
atx:0
t0
(d)
Fig. 4 Calculated temperature distribution with partial penetration. (a) Cross section; (b) longitudinal
section; (c) top surface; (d) bottom surface {workpiece: stainless steel, welding parameters: 140A, 12V,
3,5 mm/s).
592 I Vol. 118, OCTOBER1996
Transactions of the ASME
? 4
q
t
x
6
I
N g
-2
t0
at x:0
-t0
(c)
^
4
v
2
q
x
6
"!o
-2
-5
X -a:<is(rnn)
;10
at y-0
5
(b)
(d)
Fig.5 Calculated temperature distribution with full penetration. (a) Cross section; {b} longitudinal section;
parameterc: 160A" 12V, 3'5 mm/s).
i"i ap surface; (d) bottom surface (worftpiece: stainless steel, welding
6
0' 5 m,/s
(?iiy
.?z
€
I
N
?+
i'
E I
I
N 0
0
-2
-
e
-
6
-
1
1
_2
-
-8
6
-
{
2
0
Y-axis (mn)
2
-
2
A
2
4
Y-arcis (mm)
4
6
8
x:-dmm
6 8
x---4mn
(a)
(a)
5
6
-0.5m/e
?'
? t
E
4€ ,
15 2
I
N
I
0
N g
-2
-2
-r0 -8
-r0 -8
-
-
0.5 m/s
6
- 4 - 2
X - axis (crn)
0
2
G)
8
-
6
1
at Y:0
- f - 2
X - axis (nsr)
(b)
0
2
1
at YEO
q
*[.$6/3
6
6
E 4
-{
x
{t 2
E
o
x
9 2
I
)r
0
0
-2
-2
-
1
0
-
8
-
6
-
4
-
X - a:ris (srm)
2
0
2
4
at Pool -sLttfacc
-10-8
-6
-4
-2
x -Dds
0
(mgr)
I
2
at Pool - surfacc
\Fig. 6 Calculated fluid flow in weld pools with partial penetration. (a)
cross section; (b) longitudinal section; (c) top surface (workpiece: stainless steel, welding parameters: 140A, 12V' 3.5 mm/s).
Journal of Engineering Materials and Technology
Gross
Fig. 7 calculated fluid flow in weld pools with full peneration. {a)
stainless
"e-"tion; (b) longitudinal section; (c) top sudace (workpiece:
steel, weiding parameters: 160A, 12V,3.5 mm/sl'
OCTOBER1996, Vol. 118 | 593
measured
calculatedwith deformation
calculatedwithout deformation
€ro
3
2
0
-6
-
4
-
2 0 2 '
Y-uis (Dn)
l
g1o
o
E
o
6
Fig.8 Weldcrosssectioncomparisonbetweencalculationandexperim6nt. (workpiece:stainlesssteel, welding parameters:160A,12V' 3'5
mm/s)
partially penetrated weld pools t261. Hence, the small flow
velocity on the bottom pool surface does not significantly affect
the overall flow pattern in the weld pool.
GTA welding experiments are carried out for measuring the
geometry of the weld pool and cross sectional thape of the
iveld in-order to verify the validity of the nume\cal model.
A comparison between calculated and experimental$ obtained
weld cioss section. is shown in Fig. 8. In Fig. 8, thd solid line
indicates the measured result, the dash-dot line represents the
calculated result without consideration of pool surface deformation, and the dash line is the calculated one with consideration of
pool surface deformation. The measured boundary was obtained
hom the macrograph of the weld cross section. It can be seen
that predicted results with the consideration of pool surface
deformation matches better with the experimentally observed
ones.
A high-shutter speed camera assisted with pulsed laser illumination it tl is used to capture the clear image of the weld pool
The pool boundary is extracted by the develFig.9(a)-(c).
oped real-time image processing algorithm [12]. Then the normalized models can be identified based on the extracted pool
boundaries [14], The comparisons between the calculated and
measured weld pools are shown in the normalized coordinate
It can be seen that the numerically
system (Fig. 9(d)-(/)).
ialculated iesults are in good agreement with the measured
5 Results and Discussion
The influence of welding parameters on width, length, and
depth of the weld pool is shown in Fig. 10. The bead width,
o
N
0 c
E
o
I L O
5
o-0
100 150
50
W€ldingcun€nt(A)
x I
6
I
N
15
g10
o
o
a 5
E
o
o . 0
N
6
15
^15
1
2
3
4
Weldingspeed(mm/s)
0
5
1
Arc l€ngilh(mm)
0
-Fig. 10 Size of weld pools versus welding parameters(-.!gngttt'
(b)
-.
welding
(a)
current
welding
depth).
width,
back-side
*i-dth,..
speed(c) weldingarc length.
length, and depth (or the backside width) increase when increising the current or decreasingthe speed (Fig. 10(a)' (b))'
on the other hand, the effect of arc length on the bead width,
length, and depth (or the backside width) is more complex (Fig'
10(;)). It seems that there is an optimal range of arc length
for generating the maximum full penetration state (back-side
bead width).
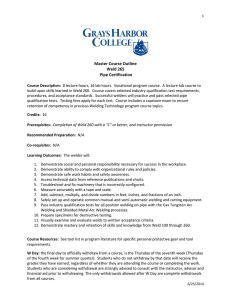
The effect of welding currents on geometrical appearance is
shown in Fig. 11. The geometrical appearances of weld pools
in the regular coordinate and the normalized coordinate systems
and (b), respectively. It is found that
are shown in Fig. ll(a)
when increasing the welding current, the length of weld pool
increases faster than the width. In order to analyze and compare
the change in shape of weld pools (as shown in Fig. ll(b)),
the weld pool lengths with different welding cunents have been
defined as rhe unit length (Its value equals 1). It is found that
when increasing welding current, the trailing angle of the pool
becomes smaller (sharper). In fact, when increasing welding
current, the surface temperature over the whole,weld pool area
tends to increase quickly. However, due to the movement of
the arc, the condition of heat ffansfer across the width of weld
is better than the transfer condition along the lengthfi"i;
direction. Therefore, the increase of heat energy from the increase in welding current will be consumed by increasing the
length of weld pools more than by increasing the width of weld
poo1s.This can also be seen in Fig. 10(a). Hence, by changing
ihe welding current, it is possible to efficiently control the width
to length iatio and the trailing angles of weld pools, which
as noted in the introduction can significantly affect the grain
structure. The above calculation results are currently being used
to develop a control model.
The eflect of welding current on the maximum width and
arc center location is shown in Fig. 11(c). It can be seen that
the change in distance between the pool rear (i.e- the point (0,
0) in Fig. 11(b)) and the arc center (described with the dashdot line) has a complex ffend as the current changes. When the
current is low, the distance has a minimum value. After the
weld pool is fully penetrated, the distance nearly remains constant. On the other hand, the distance between the pool rear and
the location of maximum width (described with the solid line)
always increases with the current. In addition, the ffend of the
change in distance between the arc center and the location of
maximum width (described with dash line) is similar to that of
the distance between the pool rear and the arc center.
p
t s o
a
-0.5L
n
-0.5 L
0.5
Unh Length
1
0
0.5
Unit Lengih
1
0.5
Unit Lenglh
1
Fig. 9 Appearance geometry comparison of weld pools between calculation and measurement (- measurement, -- numerical calculation).
(a)-(c) weld pool images (The images were acquired from the pool rear
it +S aeg view angle [12].), (d]-(4 comparison between calculated and
measured pool boundaries in the normalized coordinate. (a) and (d):
241 mm/s, (b) and (e): 1.95 mm/s, (c) and (f): 1'43 mm/s (workpiece:
stainless steel, welding parameters: 100A, 12V'3 mm arc length.)
594 | Vol. 118, OCTOBER1996
- 5 0
X-axis (mm)
0.5
UnitLengnh
150 200
1S
WeldingCunent (A)
Fig. 11 Effect of welding currents on geometrical appearance of weld
po6ts. (a) geometrical appearance of weld pools in regular coordinate
i-. ooA, -- 1ooA, .. 120A, - 160A) (b) geometrical appearance of weld
poots in normalized coordinate (-.60A, -- 100A,..120A, - 160A) (c)
iocations of arc center and maximum width (-. arc center, - maimum
width, -- distance between arc center and maximum width)
Transactions of the ASME
\-
The effect of welding speedson the geometryof-weld pools
weld pools
is shownin Fig. LZ.T1; geometricalappearances-of
in the regular Joordinate anAtfre normalized coordinatesystems
are sho#n in Fig. L2(a) and (D), respectivety:Tt-lggation of
arc center and maximum width is shown in Fig. l2(c). It is
found that when increasingthe welding speed,the increasesin
the length of weld pool are almost the same as those in the
width o:fweld poot. Similar resultshave also been acquiredby
experimentation1rig.
-is9). This implies that the effect of welding
spied on the shape not significant.Thus, the welding speed
&o U. adjusted?o acquire the desired size of the weld pool.
Ttre condol of the pool size and shape can be significantly
simplified. On the ottrer hand, it can be seenthat the locations
of the arc center and the maximum width in the normalized
coordinatesystem remain nearly constant (Fig. l2(c)). This
again showi that the influence of the welding speed on the
shapeof the weld Pool is slight.
Eff."t of the arl length on the geometry of weld pool is
shown in Fig. 13. The geometricalappearanceof weld pool in
the regular coordinate and the normalized coordinate systems
are sh6wn in Fig. l3(a) and (b). The locations of arc center
and maximum width are shown in Fig. 13(c). It can be seen
that the change in the pool size is significant when the arc
length is less than 3 mm. However, when the arc length exceeds
bey-ond3 mm, the changein the pool size becomesslow' In
addition to the size, the shape of the weld pool also changes
with the arc length when the arc length is small. It can be seen
in Fig. l3(b) thit ttre weld pool becomescircular when the arc
lengtf, decreases.Similaly, when the arc length further in"r"ir"r, its influence on the shapeof the weld pool tends to be
small (Fig. 13(b)). compared with the current, the influence
of the arclength on the shapeis much smaller (Fig. 11(D) and
Fig. 13). A1;, the influence of the arc length on-1{resize of
thJ weld pool is rmrch smaller than that of the welding speed.
Thus,in the prospectiveconffol systemof the weld poolgeometry, the current and welding speed should be selected as the
main confol variables to adjust the size and shapeof the weld
pool. As the auxiliary variable,the arc length could be used to
achieve a fine control system for the weld pool geometry. On
the other hand, the locations of the arc center and maximum
width changevery slowly (Fig. 13(c)). In fact,when changing
the arc length, ttre arc distributed region of heat, current, and
pressuret"nas to change evenly. Therefore, the effect of arc
iength on geometricalippearanie of weld pools is not signiflcant.
6
A three-dimensionalnumerical model has been developedto
describethe fluid flow and heat transfer in weld pools. Both
the full peneffation and the free surface deforrnation of weld
pools on^th" top and bottom are considered.TemperaturedistriLution and fluid flow field are obtained. GTA welding experiments are made to verify the validity of the numerical models.
It is found that the calculated results have a good agreement
1
10
o
o
c
L
-to
*--3r,"trh)
*_l
I
(6
Eo-.
c
5
1
0
unitLength
Fig. 13 Effect of welding arc lengths on geometrical appearance of
wJH pools. (a) Geometrical appearancg of weld pools in the regular
coordinate ( -. i mm, - 3 mm, . . 5 mm, - 7 mm). (b) geometrical appear- 3 mm, "
ance of weld pools in the normalized coordinate (-' 1 mm'
s'-'.zmm}.(c}|ocationsofarccenterandmaximumwidth(-.arc
centei - maxirirum-width, - distance between arc centerand maximum
width)
with the experimental ones. In order to analyzethe influence
of welding parameterson the geomefical appearanceof weld
pools, a n6rrralized model is developedto characteize the geometrical apperlranceof weld pools. .Based on the numerical
results,the following are found:
( 1) The welding current can significantly affect the geometrical appearance.Asthe welding current increases,the curvatUre
of the-weld pool boundary at the trailing end increases'
(2) The-effect of the welding speed on the geometrical
appearanceshape is slight. Whereas its influence on the pool
size is great.
-In
(3)
the interest range of arc length (frol -1 mm to 4
.titl, the arc length can affect both the size and the shapeof
the *el6qool. However, compared with the welding current
and speed,h influences are much weaker.
Thus, the welrling cufrent and speedcould be selectedas the
main control variablesfor adjusting the geometricalappea$nce
(size and shape)of the weld pool. The arc length cogld be used
ur un auxiliary control variable for a fine control of weld pool.
Becauseof tire weak influence of the welding speed on the
weld pool shape,a decoupling control systgm.could_be easily
developed to iontrol the size and shape of the weld pool in
order tb achieve the desired weld grain structure'
Acknowledgment
This work is supportedby the National ScienceFoundation
(DMI-9412637 an[ DMI-9414530) and Allison Engine Company, Indianapolis,IN.
References
Conclusion
6
E
sx 5
I0.5
f
c
)
- 5 0
X-axis(mm)
g"n
sl-r{i
!.t,*Tvl5,r
o
E
0.5
UnitLengtl
1
0
2
s
4
5
WddingSpeed(mtn/a)
Fig.12 Effect of welding speeds on geometrical appearance of weld
po.-ols.(a) Geometrical ap=pearanceof weld pools in the regular coordinate (-'. i.l mm/s, -. 2.i mmts, ..3.3 mm/s, - 3.9 mm/s) (b) geometricaf appearance oi weld pools in the normalized coordinate (-.2.1 mml
- 3.9 mm/s) (cl locations ot-arc center
s, --'2.7 mm/s, .. g.s ;ds,
and maximum width (-. arc center, - maximum width, -- distance between arc center and maximum width)
Joumal of Engineering Materials and Technology
..Grain Structureand SolidificationCracking
1. Kou, S., and Le, Y., 1985,
in oscillated fuc welds of 5052 Aluminum Alloy," Metall. Trans., vol. 16A'
'p. 1345.
"Alternating Grain Orientation and Weld
2 Kou, S., and Le, Y., 1985,
Vol' 16A, p' 1887'
SolidificationCracking," MetatL Trans.,
"Lnproving Weld Quality by -Low Frequency
3 Kou, S., and G, Y., 1985,
p- 5t'
Arc Oscillation," Weld../', Vol. 64'
..Welding Pararnetersand the Grain Structure
4 Kou, S., and Le, Y., 1.988,
19A'
of Weld Metal-A firirmaldynamic Consideration," Metall. Trans., Vol.
p. 1075.
"$y'eld
Metal
5 Savage,W. F', Lundin, C. D., and Atonson, A' H', 1965'
SolidificationMechanics," WeM.J., Yol.44, pp. 175s'
"hefened Orientadonin the
6 Savage,W. F', and Aronson, A. H., 1966'
Weld Fusion Zone," Weld J., Vol. 45, p. 85s'
"solidification of
7 Savage,W. F., Lundin, C. D- uod Chu'", T' F', 1968'
," Weld' J', Vol' 47' o' 522s'
Fusion Wetd in Face-CenteredCubic Metals
..Synthesisof Weld SolidificationUsing
8 Savage,and l{rubec, R. J., Lnz,
J-, VoL 51' p' 260s'
CrystallineOrganic Materials," WeId.
"Determining loin119n9lation in GTAW with
9 7-hang,Y.M., et al.,lgg3,
p' 4639'
of Weld-FaceGeometry," Weld J', VoL72'
Vision Sensin-g
"D'/namic,Analysisand
10 7jrrartg,Y.M., Kovacevic,R., and Wu, L', 1996'
control,"
Identification or Gasrungst"n Arc welding Processfor Full Penetration
p' 123-13.6'
ASME Joumal of Engi;eeing for Industrv, Vol' 118(1)'
Inaging for ProcesJControl," Advanced
1l Hoffman, t., tiSl,.l{"ut-''i-"
Material and Process,Vol. 14O'p. 37'
and Control
12 Kovacivic, R., Zhang, V. Vf', and Ruan, S'' 1995' llsgrsinS
GTA Welding," ASME Journal of Engi'
of weld toot ceometrfrJl";;"d
neeringfor Industry, Vol. 117, p' 2tO-222'
OCTOBER 1996, Vol' 118 / 595
- - l
13 Kovacevic, R., Zhang, Y. M., and Li, L., 1996, ,,Monitoring of Wetd
Penetration Based on weld Pool Geometrical Appearance," to appear in Research
Supplement, Weld, J.
14 Zhang, Y. M., Li, L., and Kovacevic, R., 1995, ,.Dynamic Estimation of
Full Penetration using Geometry of Adjacent weld pools," ASME Journal of
Engineering for Industry, Submission.
15 Zachaia,T. et al. "Three-Dimensional Transient wod{n
Arc Weldine
/
Process," Metall. Trans., Vol. 20B. o.645.
"The
16 Thompson, M. E., and Szekely, J., 1989,
Transienr Behavior of
Weld Pools with a Deformed Free Surface," Inter. J. of Heat and Mass Transfer,
Yol. 32, p. 1007.
17 Choo, R. T. C., and Szekely, J., 1990, "Modeting of High-Current Arc
With Emphases on Free Surface Phenomena in the Weld Pool," Wetd. J., YoI.
69, p.223s.
l8 Tsai, M. C., and Kou, S., 1989, "Marangoni Convection in Weld pools
With a Free Surface," Inter. J- of Numerical Methods in Fluid, Vol. 9, p. 1503.
19 Kim, J. W., and Na, S. J., 1994, "A Study on the Three-Dimensional
Analysis of Heat and Fluid Flow in Gas Metal Arc Welding Using Boundary-
Fitted Coordinates," ASME Journal of Engineering for Industry, Vol. li6, p.
78.
20 Kim, S. D., and Na, S. J., 7992, "Effect of Weld Pool Deformation on
Weld Penetration in Stationary Gas Tungsten Arc Welding," Weld. J., yol. 11,
p. 179s.
2l
Ohji, T., and Nishiguchi, K., 1983, "Mathemarical Modelling of Molten
Pool in Arc Welding of Thin Plate," IIW DOC.211-555-83.
22 Tsai, N. S., and Eagar, T. W., 1985, "Distribution of the Heat and Current
Flues in Gas Tungsten Arcs," MetaIL Trans., Vol. 168, p. 841.
23 Choi, M., and Greif, R., 1987, "A Study of the Heat Transfer During Arc
Welding With Applications to Pure Metals Temperature Materials," Numerical
Heat Transfer, Vol. Il, p. 477.
24 Patankar, S. V., 1980, Numerical Heat Transfer and Fluid Flow, McGrawHiII, NY,
25 Woods, R. A., and Milner, D. R., 1971, "Motion in the Weld Pool in Arc
Welding," Weld. J., Vol. 50, p. 163s.
26 Heiple, C. R., and Roper, J. R., 1982, "Mechanism for Minor Element
Effects on GTA Fusion Zone Geometry," Weld. "r., Vol. 61, p. 97s.
Uoecouponsto purchaeeall ASMEpublicatio
includinqopecialpublicaNionz,
codeoand etandards,and
technical ?a?gr?(preprinte). Uoecou?onelo eavemoney.Technical?a?erecoot leoewhenyou ?urchasethem
yrt\ 9o-uponelOnecou?onmay be redeemedforonetechnical ?a?er. Th,al'sa oavin66of fi.5o for members,
(otr fhe reqularpricefor preprinto).
il.OO for non-membero
?sgrrrcA{.P*psR${pftrprunrrs}€o$psffBoox
Fusrrcamorys
€ctrporu8oo{
Cotr,uNe10 couroNE
ORprnNo. COOOO|
94O (A?ME MeuBrne)/ fiBO (NoN-MrvrFERe)
CoNraws
1Ocourons(01Oeacu)
OnprnNo,C$OOO2
(Mrvarn& NoI.r-MTMFER)
fi1OO
5 9 6 / V ol. 118, O C T O B ER1 9 9 6
Transactions of the ASME