64
ELECTROMOTION 19 (2012) 64-79
PID controller for series-parallel resonant
converters using bacterial foraging optimization
E.H.E. Bayoumi and F. Salem
Abstract – The paper presents a design technique for robust PID controllers for Inductance Capacitance Inductance–T
network (LCL-T), Capacitance Inductance Inductance–T network (CLL-T), and Inductance Inductance Capacitance–T
network (LLC-T) Series-parallel Resonant Converters. The Series-parallel Converter controllers design is based on
Bacterial Foraging Optimization (BFO). A BFO algorithm is employed in order to obtain the controller parameters
assuring enhanced step response performance criterion. Simulation results of the designed controllers are compared with
that of classical controllers whose parameters are adjusted using Ziegler-Nichols technique. Results signify the superiority
of the proposed technique over the classical method. Experimental measurements of system performance validate the
proposed technique and highlight its practicability.
Keywords: resonant converter, bacterial foraging optimization, PID controller.
1. Introduction
Resonant Converters (RC) are characterized
by: 1- zero voltage switching (ZVS), 2- zero
current switching (ZCS), 3- high-frequency
operation, 4- high efficiency, 5- small size, and
6- low electromagnetic interference (EMI). RC
have been used in; dc power supplies for
industrial,
commercial,
and
domestic
applications, high-frequency ac power supplies
for induction heating, power-factor correction,
and discharge lamp ballast. The series and
parallel RC (SRC and PRC respectively) circuits
are the basic resonant converter topologies with
two reactive elements. The advantages of SRC
are; better part-load efficiency and inherent dc
blocking of the isolation transformer due to the
series capacitor in the resonant network.
However, its part-load regulation is poor and
output-voltage regulation at no load is not
possible by switching frequency variation. On
the other hand, PRC offers no-load regulation but
suffers from poor part-load efficiency and lack of
inherent dc blocking for the isolation transformer
[1, 2]. To remove these limitations, RCs with
three and four reactive components were
investigated in [3, 4].
The Series-Parallel Resonant Converters
(SPRC) with three reactive elements is a great
choice, due to various inherent advantages and
better regulation. The LCL tank circuit based
DC-DC resonant converter has been tested and
reported by many researchers [5-7]. In [8], the
LCL-T resonant converter has been established
with constant current output fed resistive load.
The converter exhibits load-independent voltage
and current gain at resonant frequency. The
feedback control circuit has not been provided.
In [9] the LCL-T half bridge resonant converter
has been developed, it is operated in constant
current power supply. The output current /
voltage are sensed for every change in load due
to the output voltage or current which increase
linearly. In this case, the feedback control circuit
has not been considered. Later, in [10] the
characteristics of LCL-T resonant converter have
been demonstrated using asymmetrical duty
cycle (ADC). The converter operated at fixed
resonant frequency and it is analyzed using state
space approach. The open loop series-parallel
resonant converter with independent load
operated at resonant frequency is tested [11]. The
converter performance characteristics are
presented by using the state space approach. The
loads are studied against supply voltage
© 2012 – Mediamira Science Publisher. All rights reserved.
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
variations.
LCC
series-parallel
resonant
converter using robust control method has been
introduced in [12]. The closed loop operation
was presented using PI controller with load
independent operation. Later, in [13] a CLC
SPRC with fuzzy logic controller was presented.
The performance of controller has been
evaluated; it was established that the load
independent operation may not be possible.
In [14], the ZVS LCL push-pull converter
with closed loop operation was represented using
PI controller. Active clamp ZVS DC-DC
converter is given in [15]. The steady state
stability analysis was presented for ZVS buck
converter. The load independent operation is not
considered. In [16] CLL half bridge resonant
converter with open loop operation is designed
and tested. The AC equivalent circuit analysis
and fundamental mode approximation (FMA)
analysis was derived. The evaluation of static
and dynamic performance was not provided. The
dynamic analysis of LLC half bridge series
resonant converter was presented in [17].
Analysis for two operating region (CCM, DCM)
is given. The performance of controller has been
evaluated. It is reported that; the load variation
and load independent operation may not be
possible [18].
Evolutionary computations with stochastic
search techniques appear to be a more promising
approach and provide a powerful method to
solve the parameter estimation problem. To
overcome difficulty of tuning approach and
improve the PID controller performance some
intelligent
methods
and
evolutionary
optimization algorithms are used for parameter
tuning. For example, evolutionary algorithms
such as Neural Network, Fuzzy Logic, Genetic
Algorithm
(GA)
and
Particle
Swarm
Optimization PSO have widely been applied to
tune PID controllers. The fuzzy logic controller
based ZVS quasi-resonant converter has been
represented in [19]. The controller performance
was presented and tested. The LCLC type seriesparallel resonant converter with open loop
operation has been developed and analyzed using
complex AC circuit [20]. The simulation results
have been given and the performance of the
converter for varying load conditions was
65
evaluated. In [21,22] parallel and series-parallel
resonant converter have been achieved. The PID
controller based on FLC is simulated. The results
give better response compared to conventional
PID controller.
In GA-Based optimization, its natural genetic
operations would still result in an enormous
computational effort, it may appear shortcoming
of premature convergence and convergence is
more slowly [23, 24]. Conversely, PSO presents
some attractive features over the previous
heuristic optimization algorithms which are as
follows: ease of implementation, stable
convergence [25], and shorter calculation time
[26]. According to these features, PSO has been
applied for optimization of many nonlinear and
highly complex problems [25] and [27]. As an
example of PSO application in power systems,
PSO-PID method was used for AVR system and
compared with Genetic Algorithm based PID
controller (GA-PID). It showed that PSO is more
efficient than GA [25]. This study proposes
design of a PSO-Based PID controller by using
various fitness functions. As, the performance of
evolutionary algorithm depends on selected
fitness function, parameters of proposed
controller are obtained by using of 8 fitness
functions. The performances of the optimized
controller are compared in the hardware circuit
with respect to Overshoot, Undershoot, Rise
Time, Settling Time, and Steady State Error. The
optimized controllers are applied to a DC-DC
buck converter which is a simple and the most
used static power converter. To compare the
performance of the optimized controller in
hardware, a digital signal processor based DCDC buck converter evolution board is used [28].
It should be noted that even the most successful
nature-inspired optimization techniques, such as
GA and PSO, are also sensitive to the increase of
the problem complexity and dimensionality due
to their stochastic nature [29]. In recent years,
more attention is given to bacterial foraging
optimization (BFO) which has a rich source of
potential
engineering
applications
and
computation. Few models have been developed
to mimic bacterial foraging behaviors and been
applied for solving practical problems [29, 30].
Among them, BFO is a population-based
66
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
Fig. 1. Block-diagram of general series-parallel resonant converter.
numerical optimization algorithm. It solved these
engineering problems successfully.
In this paper, we are focused to develop the
state space model and analyze the performance
of series-parallel resonant converter. Various
resonant topologies (like LCL-T, CLL-T and
LLC-T) are compared in terms of dynamic and
steady state stability analysis. The LCL-T SPRC
provides better performance compared to CLL-T
SPRC and LLC-T SPRC. The performance of
controller is enhanced by using bacterial forging
optimization in designing the PID controller
employed for different converters. A prototype
300 W, 100 kHz LCL-T SPRC is implemented
and tested. The experimental results of the
prototype show a mutual agreement with the
simulation results.
2. Generalized SPRC control circuit
The block diagram of SPRC with two PID
controllers is shown in Fig.1. It consists of two
stages; the first stage converts a DC voltage to a
high frequency AC voltage. The second stage of
the converter is to convert the ac power to dc
power by suitable high frequency rectifier and
filter circuit. Power from the resonant circuit is
taken either through a transformer in series with
the resonant circuit or series in the capacitor
comprising the resonant circuit. In both cases the
high frequency feature of the link allows the use
of a high frequency transformer to provide
voltage transformation and ohmic isolation
between the dc source and the load.
In SPRC the load voltage can be controlled by
varying the switching frequency or by varying
the phase difference between the converters. The
phase control technique is suitable for wide load
operations since the output voltage is
independent of load. Another advantage of this
circuit is that the device currents are proportional
to load current, which increases the efficiency of
the converter at light loads [31].
A schematic diagram of general SPRC is
shown in Fig. 2. The resonant circuit consists of
general series impedance Z1, parallel impedance
Z3 and series impedance Z2. The S1-S4 are
MOSFET switching devices and the D1-D4 are
anti-parallel diodes across these switching
devices. The MOSFET (S1) and its anti-parallel
diode (D1) act as a bidirectional switch. The
positive portion of switch current flows through
the MOSFET and negative portion flows through
the anti-parallel diode. The load is connected
across a bridge rectifier via L0 and C0. Thus, the
voltage across the point AB is rectified and fed
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
67
Fig. 2. General series-parallel resonant converter.
to the load through L0 and C0. It is assumed that
the converter operates in the continuous
conduction mode and the semiconductors have
ideal characteristics.
3. Mathematical model of SPRC
The equivalent circuit of general SPRC is
shown in Fig.3. In addition, the following
simplifying assumptions are made.
1. All semiconductors are lossless.
2. All components are ideal.
3. Switches have zero transition time.
4. There is no delay between the switch gating
signals.
5. The effects of snubber capacitors are
neglected.
Vo ( s)
Z3 Z L
Vin ( s ) ( Z 2 Z 3 ) ( Z1 Z 3 Z L ) Z 32
Z3 Z L
Z1Z 2 Z1Z 3 Z 2 Z L Z 2 Z 3 Z 3 Z L
(1)
The state space model for CLL-T SPRC,
LLC-T SPRC, and LCL-T SPRC is given in the
following sections.
3.1. CLL-T SPRC model
1
, Z 2 L2 s , and
Cs
Z 3 L1 s . Substitute by Z1, Z2, and Z3 in Eq. (1).
The vector space equation for the converter is
given by:
In CLL-T SPRC Z1
X A X BU
The Transfer Function for the general SPRC
is:
where
iL1
d
X VZ 3 ,
dt
iL 2
Fig. 3. Equivalent circuit for general SPRC.
(2)
iL1
u
X VZ 3 , U in ,
uo
iL 2
68
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
uin=Vin and uo=Vo
The state space model for CLL-T SPRC is:
0
X 1 L1 L2
X CL L
2
1 2
4. Design tools
1
0
Z L ( L1 L2 ) x1 Z L u in
x2 L
L1 L2
2
(3)
The output equation is:
x
yo 1 0 1
x2
(4)
3.2. LLC-T SPRC model
1
, and
Cs
Z 3 L2 s . Substitute by Z1, Z2, and Z3 in Eq. (1).
The state space model for LLC-T SPRC is:
In LLC-T SPRC Z1 L1 s , Z 2
X 1 0
X 0
2 Z
L
X3
CL
L
1 2
1
0
L1 L2
CL1 L2
0 x1 0
1 x 2 0 u in
ZL ZL
x3
L2
L1
(5)
The output equation is:
x1
yo 1 0 0 x2
x3
(6)
3.3. LCL-T SPRC model
In LCL-T SPRC Z1 L1 s , Z 2 L2 s , and
1
Z3
. Substitute by Z1, Z2, and Z3 in Eq. (1).
Cs
The state space model for LCL-T SPRC is:
X 1 0
X 0
2 Z
L
X3
CL1 L2
1
0
1 1
1
( )
C L1 L2
0 x1 0
1 x 2 0 u in
Z
ZL
x3 L
L1
CL1 L2
(7)
The output equation is:
x1
yo 1 0 0 x2
x3
(8)
4.1. Converter design parameters
The design of SPRC is given in [8], its
specifications are; minimum and maximum value
of dc voltage, maximum output current (Io),
corresponding to the full-load condition and
switching frequency (fs). The transformer turns
ratio (N1/N2) is unity.
The designed elements for SPRC are
presented in Appendix 1. The model used assures
resonance for all different power ranges (load
independent design) and limits the current and
voltage peak values. The BFO algorithm is
employed to estimate the best gains values for
the PID controllers which enhance the step
response performance criterion. The controllers
utilized are robust against parameter variations
and cope well for a wide load operating
conditions.
4.2. PID controller
A standard PID controller is a three terms
controller, whose transfer function is given by:
Kp
Gc K p K p Td s
(9)
Ti s
There are several prescriptive rules used for
tuning PID controllers. In the proposed system
the Ziegler-Nichols method is used for tuning the
gain value (kp, Td, and Ti). Controllers based on
the PID approach are commonly used for DC–
DC converter applications.
4.3. Bacterial foraging optimization (BFO)
In recent years, bacterial foraging behaviors
(i.e. bacterial chemotaxis) as a rich source of
potential
engineering
applications
and
computational model have attracted more and
more attentions. Few models have been
developed to mimic bacterial foraging behaviors
and have been applied for solving practical
problems. Among them, Bacterial Foraging
Optimization (BFO) is a population-based
numerical optimization algorithm.
The motile bacteria such as E. coli and
salmonella propel themselves by rotating their
flagella. To move forward, the flagella
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
counterclockwise rotate and the organism
“swims” (or “runs”). While a clockwise rotation
of the flagellum causes the bacterium randomly
“tumble” itself in a new direction and then swims
again. Alternation between “swim” and “tumble”
enable the bacterium search for nutrients in
random directions. Swimming is more frequent
as the bacterium approaches a nutrient gradient.
Tumbling, hence direction changes, is more
frequent as the bacterium moves away from
some food to search for more. Basically,
bacterial chemotaxis is a complex combination
of swimming and tumbling that keeps bacteria in
places of higher concentration of nutrients.
Bacterial chemotaxis can also be considered as
the optimization process of the exploitation of
known resources, and costly exploration for new,
potentially more valuable resources.
The original Bacterial Foraging Optimization
system consists of three principal mechanisms,
namely
chemotaxis,
reproduction,
and
elimination-dispersal. We briefly describe each
of these processes as follows.
a) Chemotaxis
In the original BFO, a unit walk with random
direction represents a “tumble” and a unit walk
with the same direction in the last step indicates
a “run”. Suppose θi (j,k,l) represents the
bacterium at jth chemotactic, kth reproductive, and
lth elimination-dispersal step. C(i) is the
chemotactic step size during each run or tumble
(i.e., run-length unit). Then in each
computational chemotactic step, the movement
of the ith bacterium can be represented as
(i)
i ( j 1, k , l ) i ( j, k , l ) C (i)
(10)
T (i)(i)
where Δ(i) is the direction vector of the jth
chemotactic step. When the bacterial movement
is run, Δ(i) is the same with the last chemotactic
step; otherwise, Δ(i) is a random vector whose
elements lie in [-1, 1]. With the activity of run or
tumble taken at each step of the chemotaxis
process, a step fitness, denoted as J (i,j,k,l), will
be evaluated.
69
b) Reproduction
The health status of each bacterium is
calculated as the sum of the step fitness during
Nc
its life, i.e.
J (i, j, k , l ) ,
where Nc is the
j 1
maximum step in a chemotaxis process. All
bacteria are sorted in reverse order according to
health status. In the reproduction step, only the
first half of population survives and a surviving
bacterium splits into two identical ones, which
are then placed in the same locations. Thus, the
population of bacteria keeps constant.
c) Elimination and dispersal
The chemotaxis provides a basis for local
search, and the reproduction process speeds up
the convergence which has been simulated by the
classical BFO. While to a large extent, only
chemotaxis and reproduction are not enough for
global optima searching. Since bacteria may get
stuck around the initial positions or local optima,
it is possible for the diversity of BFO to change
either gradually or suddenly to eliminate the
accidents of being trapped into the local optima.
In BFO, the dispersion event happens after a
certain number of reproduction processes. Then
some bacteria are chosen, according to a preset
probability Ped, to be killed and moved to another
position within the environment.
d) Step-by-step algorithm
The step-by-step algorithm of the BFO can be
summarized as:
[Step 1] Initialize parameters n, S, Nc, Ns, Nre,
Ned, Ped, C(i) (i=1,2,…,S), θi. Where,
n: Dimension of the search space,
S: The number of bacteria in the colony,
C(i): the size of the step taken in each run
or tumble.
[Step 2] Elimination-dispersal loop: l=l+1.
[Step 3] Reproduction loop: k=k+1.
[Step 4] Chemotaxis loop: j=j+1.
[substep a] For i=1=1, 2,…, S, take a
chemotactic step for bacterium i as
follows:
[substep b] Compute fitness function, J
(i,j,k,l).
70
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
[substep c] Let Jlast=J (i,j,k,l) to save this
value since we may find better value via a
run.
[substep d] Tumble: Generate a random
vector Δ(i)∈ Rn with each element Δm(i),
m=1, 2, …, n, a random number on [-1,
1].
[substep e] Move: Let
(i)
(11)
i ( j 1, k , l ) i ( j, k , l ) C (i)
T (i)(i)
reached and start the next generation in the
chemotactic loop.
[Step 8] Elimination–dispersal: For i=1, 2, …, S,
with probability Ped, eliminate and disperse
each bacterium, which results in keeping the
number of bacteria in the population constant.
To do this, if a bacterium is eliminated,
simply disperse one to a random location on
the optimization domain. If l < Ned, then go to
step 2; otherwise end.
This results in a step of size C(i) in the
direction of the tumble for bacterium i.
[substep f] Compute J (i,j+1,k,l) with θi
(j+1,k,l).
[substep g] Swim:
(i) Let m=0 (counter for swim length).
(ii) While m< Ns (if has not climbed down
too long)
• Let m=m+1.
• If J (i,j+1,k,l)< Jlast, let Jlast =
J(i,j+1,k,l), then another step of size
C(i) in this same direction will be
taken as equation (11) and use the
new generated θi (j+1,k,l) to
compute the new J (i,j+1,k,l).
• Else let m= Ns.
[substep h] Go to next bacterium (i+1). if
i≠S, go to substep(b) to process the next
bacterium.
[Step 5] If j < Nc, go to step 3. In this case,
continue chemotaxis since the life of the
bacteria is not over.
[Step 6] Reproduction:
[substep a] For the given k and l, and for
each i=1, 2, …, S, let
e) Fitness function
The tuning of the PID controller parameters
can be done by using BFO. The evolutional
computing tools give optimal solution. To have a
well designed controller based on tuned
parameters, four control terms have to be
optimized.
These terms are; percent overshoot (Mp),
settling time (ts), rise time (tr) and steady state
error (Ess). The optimization function is given
by:
i
J health
Nc 1
J (i, j, k , l )
(12)
j 1
be the health of the bacteria. Sort bacteria
in order of ascending values (Jhealth).
[substep b] The Sr bacteria with the highest
Jhealth values die and the other Sr bacteria
with the best values split and the copies
that are made are placed at the same
location as their parent.
[Step 7] If k<Nre go to step 2. In this case the
number of specified reproduction steps is not
Minimize f (k p , Td , Ti ) (1 e ) (M p Ess ) e (ts tr )
k p , Td ,Ti
(13)
where is a weighting factor ( < 0.7 to reduce
ts and tr and >0.7 to reduce Mp and Ess). The
BFO fitness function (J) is the reciprocal of the
optimization function given by (13).
5. Results
5.1. Stability analysis for SPRC
Fig.4 represents the stability investigation of
the SPRC using the Nyquist Stability Criterion.
The stability is determined if G(s)H(s) contour in
the G(s)H(s) plan corresponding to Nyquist
contour in s-plan encircles the point -1+j0 in the
anti-clockwise direction as many times as the
number of right half s-plan poles of G(s)H(s).
Then the closed loop system is stable. If there is
no encirclement of -1+j0 point. This implies that;
the system is stable if there are no poles of G(s)
H(s) in the right half s-plan. If there are poles on
right half s-plan then the system is unstable.
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
71
Fig. 4. Stability analysis of (a) CLL-T SPRC, (b) LLC-T SPRC, (c) LCL-T SPRC.
a) A. CLL-T SPRC
The CLL-T SPRC Nyquist plot is shown in
Fig.4 (a) and extracted from the state space
model Eq. (2). It is observed that the -1+j0 point
is encircled in clockwise direction one time.
Therefore, the CLL-T converter circuit is
unstable against the system parameters
variations.
b) LLC-T SPRC
The Nyquist plot for LLC-T SPRC is given in
Fig.4(b). The plot is drawn from the state space
model Eq. (4). It is observed that the -1+j0 point
is encircled clockwise. Then, the closed loop
system is unstable. It is concluded that the LLCT converter circuit is unstable against the system
parameters variations.
c) LCL-T SPRC
The Nyquist plot given in Fig. 4(c) has been
illustrated for LCL-T SPRC from state space
model Eq. (6). It is concluded that the LCL-T
converter circuit is stable against the system
parameters variations. It is observed that -1+j0
point is encircled in the both direction in one
time. Hence net encirclement is zero. Also the
open loop system has no poles at the right half of
s-plan.
5.2. Simulation results
The PID controller for three-types of SPRC is
designed off-line using BFO. The BFO algorithm
given in this paper is achieved by using
MATLAB software. The BFO optimize the
controller parameters (kp, Td, and Ti) to enhance
the controller response. Hence, the maximum
72
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
Fig. 5. MATLAB Simulink model of the LCL_T SPRC.
degree of system stability is obtained by solving
the minimize optimization problem via BFO.
The LCL-T SPRC, CLL-T SPRC and LLC-T
SPRC have been simulated. The entire system is
tested with a switching frequency of 100 KHz.
The proposed PID controller is compared with
the Ziegler-Nichols conventional one. The
MATLAB/Simulink simulation model for the
LCL-T SPRC is given in Fig. 5.
a) CLL-T SPRC
In CLL-T SPRC, the inductor and capacitor
are connected to the output of inverter for
resonance purpose. They are selected for
impedance matching, and current control.
Another good feature of this converter is that; the
converter operation is not affected by the non
idealities of the output transformer (magnetizing
inductance) due to the additional resonance
inductor L2.
The Two PIDs controllers of CLL-T SPRC
using the BFO have been simulated. The
converter resonant voltage, resonant current and
output load voltage are shown in Fig. 6. Fig. 6(a)
shows the converter resonant voltage, resonant
current at point AB by using Ziegler-Nichols
PID technique for the controller 1. Fig. 6(b)
shows the same variables as Fig. 6(a) by using
the BFO-PID technique for controller 1. A
comparison between the classical and proposed
technique is presented in Fig 6 (c) to illustrate
the output voltage Vo of the second PID
controller in the two techniques. The control
parameters of the two PID controllers with BFO
and Ziegler-Nichols for CLL-T SPRC are given
in Table 1. The output voltage controller step
response performance parameters for CLL-T
SPRC (Mp, tr, ts, and Ess) are shown in Table 4.
Table 1. The parameters of PID controllers for CLL-T
SPRC
PID parameters
Kp
Td
Ti
Kp
Td
Ti
Ziegler-Nichols
Controller 1
15.23
27.25
0.523
Controller 2
9.756
0.795
1.693
BFO
97.32
154.59
0.874
7.823
2.349
0.953
b) LLC-T SPRC
The LLC-T SPRC has been simulated using
MATLAB/Simulink toolbox. The LLC-T SPRC
PID-BFO controllers has been designed and
simulated. The wave forms of resonant voltage,
resonant current and output voltage are shown in
Fig.7. The LLC-T SPRC performance is
compared with Ziegler-Nichols PID controllers.
The control parameters of the two PID
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
73
Fig. 6. (a) Inverter voltage and inverter current with Ziegler-Nichols technique; (b) Inverter voltage and inverter current
with BFO technique; (c) Output voltage with BFO and Ziegler-Nichols techniques (Vr =100V).
controllers with BFO and Ziegler-Nichols for
LLC-T SPRC are given in Table 2.
Table 2. The parameters of PID controllers for LCC-T
SPRC.
PID parameters
Kp
Td
Ti
Kp
Td
Ti
Ziegler-Nichols
Controller 1
23.22
33.67
0.645
Controller 2
6.256
0.879
0.784
BFO
93.3
260.53
1.251
8.742
1.238
0.8056
The output voltage controller step response
performance parameters for CLL-T SPRC (Mp,
tr, ts, and Ess) are shown in Table 4. It has been
shown in Fig.7 a slight drop in the resonant
characteristics. This is due to the increase in
conduction losses in the bridge inverter and
resonant network.
c) LCL-T SPRC
LLC-T SPRC resonant current and resonant
voltage are illustrated in Fig. 8. The overshoot
and settling time is less compared to the other
two-converters. It is seen that the inverter output
is a square wave without any distortion.
74
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
Fig. 7. (a) Inverter voltage and inverter current with Ziegler-Nichols technique; (b) Inverter voltage and inverter current
with BFO technique; (c) Output voltage with BFO and Ziegler-Nichols techniques (Vr =100V).
Fig. 8. (a) Inverter voltage and inverter current with Ziegler-Nichols technique (b) Inverter voltage and inverter current
with BFO technique (c) Output voltage with BFO and Ziegler-Nichols techniques (Vr =100V).
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
75
Fig. 8(b) shows a sinusoidal inverter current
with low ripple contents. In Fig.8.(c) it is shown
that the output voltage follows the reference with
high accuracy. It shows a good tracking response
of the proposed controller. The ts is 0.0009 sec,
the Ess is 0.001 V and the Mp is 0%.
It is reported that; the CLL-T SPRC, LLC-T
SPRC are ineffective in eliminating the
overshoot, rise time and high frequency noise
suppression. This is because of:
1- The integrator increases the system type
number, thus minimizing the steady-state
error.
2- The additional phase delay introduced by the
integrator tends to slow down the response.
Table 4 shows that the percent overshoot of
the BFO output voltage controller compared to
Ziegler-Nichols output voltage controller is too
low in LLC-T and CLL-T SPRCs. As well, it is
eliminated in LCL-T SPRC. The settling time,
rise time and steady state error are much lower
with the BFO control strategy contrasted to
conventional control method (Ziegler-Nichols).
The measurement noise is highly suppressed.
Moreover, we can conclude that the LCL-T
SPRC with the proposed control strategy has a
superior performance compared to other resonant
topologies.
It is inferred that the measurement overshoot
and noise is highly suppressed. The transient and
steady state performance of the conventional and
the proposed PID controller 2 are given in
Table 4. This ensures that the system can be
controlled effectively with BFO-PID controllers.
A prototype of CLL-T, LLC-T and LCL-T
SPRC was designed and built. It is operating at
300 W, 100 kHz. The specifications and design
values of the major components of the converter
are summarized in Appendix 1. The table also
lists, the values of the components used in the
test. IRF 840 MOSFETs are used as the switches
in the converter. Fast-recovery diodes MUR
4100 are used for the output bridge rectifier. A
SHARC DSP (ADSP-21262) 32-Bit FloatingPoint is used to generate driving pulses. These
pulses are amplified using the driver IC IR2110.
The two PID controllers programs are
implemented by the DSP. The controller’s gains
are evaluated off line by the BFO algorithm by
using MATLAB.
The experimental waveforms of resonant
voltage, resonant current and output voltage, are
demonstrating CLL-T, LLC-T and LCL-T SPRC
in Figs. (9-11). These figures demonstrate the
BFO-PID controller performance, which have
good dynamic and robust response. It is clearly
seen form Fig.9 (a) and (b) the resonant voltage,
resonant current and output voltage of CLL-T
SPRC. These waveforms are slightly distorted.
They contain some harmonics due to the loading
effect of the resonant circuit. Figs.10. (a) and (b)
presents the inverter voltage, inverter current and
output voltage for LLC-T SPRC, it is measured
from the point AB of the bridge inverter. It can
be seen that the peaks are relatively high, but an
almost constant level is presented, which is
assured by the primary converter controller.
Table 3. The parameters of PID controllers for LCL-T
SPRC.
PID parameters
Kp
Td
Ti
Kp
Td
Ti
Ziegler-Nichols
Controller 1
18.47
54.4
1.257
Controller 2
7.0674
1.084
0.486
BFO
85.72
98.35
1.726
9.143
1.436
1.232
Table 4. Comparative analysis of LLC-T, CLL-T, and
LCL-T SPRC output voltage
Type of
Mp
PID
(percent
Controller overshoot)
ZieglerNichols
BFO
ZieglerNichols
BFO
ZieglerNichols
BFO
6.94 %
tr (rise
time)
ts (settling Ess (steady
time)
state error)
LLC-T SPRC
0.029 sec 0.081 sec
5.97 volts
1.06 %
0.0187 sec 0.056 sec 1.96 volts
CLL-T SPRC
7.043 % 0.025 sec 0.0703 sec 6.89 volts
2.96 %
0.211 sec 0.0401 sec 5.13 volts
LCL-T SPRC
9.105 % 0.0017 sec 0.00423
0.324
sec
volts
0.00 % 0.0009 sec 0.00211
0.001
(zero %)
sec
volts
5.3. Experimental results
76
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
Fig. 9. Experimental waveforms (a) CH1: Resonant voltage [Volt. Scale: 40 V/div.].CH2: Resonant current [Amp. Scale:
0.5A/div.] for CLL-T SPRC (b) Output voltage for CLL-T SPRC (CH1: Output capacitor voltage [Volt. Scale: 50 V/div.]
Fig. 10. Experimental waveforms (a) CH1: Resonant voltage [Volt. Scale: 40 V/div.].CH2: Resonant current [Amp. Scale:
0.5A/div.] for LLC-T SPRC (b) Output voltage for LLC-T SPRC (CH1:Output capacitor voltage [Volt. Scale: 50 V/div.]
Fig. 11. Experimental waveforms (a) CH1: Resonant voltage [Volt. Scale: 40 V/div.].CH2: Resonant current [Amp. Scale:
0.5A/div.] for LCL-T SPRC (b) Output voltage for LCL-T SPRC (CH1: Output capacitor voltage [Volt. Scale: 50 V/div.]
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
In Figs.11 (a-b) the inverter voltage, inverter
current and output voltage waveform for LCL-T
SPRC are given. It shows the following:
1- Low switching power losses.
2- Nearly sinusoidal current waveform (very
low harmonics content).
3- No output voltage drop (no output voltage
steady state error).
Fig. 12 shows that the proposed controller is
able to operate under load- independent
operation. The output follows the reference with
precise accuracy and superior dynamic
performances.
1
0.9
0.8
Efficiency
0.7
0.6
0.5
0.4
0.3
0.2
LCL-T SPRC
LLC-T SPRC
CLL-T SPRC
0.1
0
0
50
100
150
200
Output Power (watt)
250
300
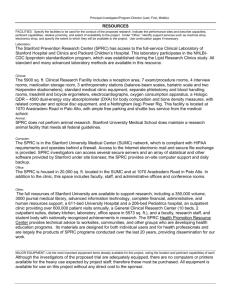
Fig. 12. Output power vs. efficiency for CLL-T, LLC-T,
and LCL-T SPRC for inductive load.
The comparison chart shown in Fig.12 shows
that the LCL-T SPRC has the highest efficiency
for the same output power compared to CLL-T,
and LLC-T SPRCs. The conversion efficiency of
the prototype is measured by varying the pulse to
the inverter to vary the output power under
different loading conditions at 100 V input DC
voltage. The full load conversion efficiency of
the prototype is measured to be 92 for LCL-T
SPRC, 0.81 for LLC-T SPRC and 0.74 for CLLT SPRC. It remains above 0.80 for 100-300 W
output power in CLL-T SPRC. The power loss in
the prototype operating occurs in the MOSFETs
and diodes are the small portion. While, the rest
of losses can be attributed largely to the core and
winding loss in transformer and resonant
inductor.
77
6. Conclusion
The mathematical models for CLL-T, LLC-T,
and LCL-T SPRCs have been developed.
Bacterial foraging optimization is designed and
used to estimate the PID controller parameters.
These parameters are selected to tune and
enhance the performance criterion of the step
response (percent overshoot, settling time, raise
time, and steady state error). The proposed
system for CLL-T, LLC-T and LCL-T SPRC are
simulated by using MATLAB. The response of
the developed controllers is compared to that of
conventional PID controllers whose parameters
are tuned using the well-known Ziegler-Nichols
method. Stability analysis for the three-SPRCs is
presented. Results indicate the primacy of the
proposed technique over the conventional
method. It is concluded that the bacterial
foraging optimization-PID controllers for LCL-T
SPRC can provide load independent operation
and better voltage regulation compared to the
other two resonant topologies. Prototypes for
three SPRC were designed, implemented and
tested. Moreover, the theoretical results are
confirmed, and the proposed technique is ratified
through experimental measurements.
Appendix 1. SPRC design parameters
Parameter
Power output
Minimum input voltage
Minimum output voltage
Maximum load current
Maximum overload current
Transformer Turns ratio (N1/N2)
Switching frequency (fs)
Series Inductance L1, L2
Parallel Capacitance (C)
Load Inductance (Lo)
Load Capacitance (Co)
Appendix 2. BFO parameters
Type
S
Nc
Ns
Nre
Ned
dattract
BFO
100
4
100
5
2
0.1
Value
300 W
100 V
100 V
3A
4A
1
100 KHz
39.18 μH
66 nF
1 mH
650 μF
78
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
attract
hrepellent
repellent
Ped
C
0.2
0.1
10
0.1
10-3x [-5.12, 5.12]
References
1. Vorperian, V. and Cuk, S., A complete dc analysis of
series resonant converter. Proc. IEEE Power
Electronics Specialists Conf. (PESC), Cambridge,
MA, 1982, pp. 85–100.
2. Bhat, A.K.S. and Swamy, M.M., Analysis and design
of high frequency parallel resonant converter
operating above resonance. Proc. IEEE Applied Power
Electronics Conf. and Expo. (APEC), New Orleans,
LA, 1988, pp. 182–189.
3. Severns R.P., Topologies for three-element resonant
converters. IEEE Transactions on Power Electronics,
vol. 7, no. 1, Jan. 1992, pp. 89–98.
4. Bataresh I., Resonant converter topologies with three
and four energy storage elements. IEEE Transactions
on Power Electronics, vol. 9, no. 1, Jan. 1994, pp. 64–
73.
5. Raju, G.S.N. and Seshagirirao, D., An LCL Resonant
converter with PWM Control Analysis, simulation,
and Implementation. IEEE Transactions on Power
Electronics, vol.10, no.2, March 1995, pp.164-174.
6. Mangesh, B., Sunil, T. and Swarna K., Analysis and
Design of an LCL-T Resonant Converter as a
Constant-Current Power Supply. IEEE Transactions
on Industrial Electronics, vol. 52, no. 6, December
2005, pp.1547-1554.
7. Mangesh, B., Sunil T. and Swarna K., LCL-T Resonant
Converter With Clamp Diodes: A Novel ConstantCurrent Power Supply With Inherent ConstantVoltage Limit. IEEE Transactions on Industrial
Electronics, vol. 54, no. 2, April 2007, pp.741-746.
8. Mangesh B., Nagesh, K.V., Bhatia, M.S. and Sunil T.,
Characteristics and Design of an Asymmetrical DutyCycle-Controlled LCL-T Resonant Converter. IEEE
Transactions on Power Electronics, vol. 24, no.10,
October 2009, pp.2268-2275.
9. Vijayakumar B., and Bhat, A.K.S., Series-Parallel
Resonant Converter Operating in Discontinuous
Current Mode-Analysis, Design, Simulation, and
Experimental Results. IEEE Transactions on Circuits
and System-I: Fundamental Theory and Applications,
vol. 47, no. 4, April 2000, pp.433-442.
10. Chew, L.C. and Eng, K.K., A Noval Robust Control
Method for the Series-Parallel Resonant Converter.
IEEE Transactions on Power Electronics, vol. 24,
no.8, August 2009, pp.1896-1904.
11. Sivakumaran, T.S. and Natarajan S.P., Development of
Fuzzy Control of Series-Parallel Loaded Resonant
converter-Simulation and Experimental Evaluation.
Proceedings of India International Conference on
Power Electronics, 2006, pp 360-366.
12. Arun S. and Rama Raddy, S., PSPICE simulation and
implementation of closed loop controller ZVS LCL
push-pull DC-DC Converter. International Journal of
Computer Science and Network Security, vol. 8, no.6,
June 2008, pp.67-73.
13. Bhat, A.K.S., Analysis and Design of a Series-Parallel
Resonant converter, IEEE Transactions on Power
Electronics, vol.8, no.1, January 1993, pp.1-11.
14. Correa, J.M. and Farret, F.A., A Fuzzy-Controlled
Pulse Density Modulation Strategy for a Series
Resonant Inverter with Wide Load Range. IEEE
Transactions on Power Electronics, vol. 12, no 1, May
2003, pp 1650-1655.
15. Lakshminarasamma, N., Masihuzzaman, M. and
Ramanarayanan, V., Steady state stability of Current
Mode Active Clamp ZVS DC-DC Converter. IEEE
Transactions on Power Electronics, vol. 24, no.10,
October 2009.
16. Martin, P.F., Christopher, R., Gould Adam, J.G.,
David, A.S., and Christopher, M.B., Analysis of CLL
Voltage-Output Resonant Converters using Describing
Function. IEEE Transactions on Power Electronics,
vol. 23, no.4, July 2008.
17. Guan-Chyn, H., Cheng-Yuan, T. and Shih-Hung, H.,
Design Considerations for LLC Series-Resonant
Converter in Two-Resonant Regions. IEEE
Transactions on Power Electronics, vol. 17, no.21
June 2007, pp 731 – 736
18. Hang-Seok, C., Design Considerations of Half Bridge
LLC Series-Resonant Converter. International Journal
of Power Electronics, vol. 7, no.1, January 2007.
19. Arulselvi, S., Govindarajan, U. and Saminath, V.,
Development of Simple Fuzzy Logic Controller
(SFLC) for ZVS Quasi-Resonant Converter: Design,
Simulation and Experimentation. Indian institute of
science. J. Indian inst. Sci., vol. 86, June 2006, pp
215–23.
20. Laouamer, R., Ferrieux, J.P., Benqassmi, H.,
Normand, O. and Buchheit, N., A Comparison of
Resonant Converter Topologies with Three and Four
Energy Storage Elements for Automatic Inductive
Charging Application. Electrical Power Components
and Systems, vol.27, issue 3, 1999, pp.221-236.
21. Nagarajan, C. and Madheswaran, M., Performance
Analysis of LCL-T Resonant Converter with Fuzzy /
PID Controller Using State Space Analysis.
International Journal of Electronic Engineering
Research, vol. 2, no. 1, 2010, pp. 51–70.
22. Bhat, A.K.S., Analysis and Design of LCL-Type Series
Resonant Converter. IEEE INTELEC, 1994, pp. 172178.
23. Mitsukura, Y., Yamamato, T. and Kaneda, M., A
design of Self Tuning PID Controllers using Genetic
Algorithm. American Conference on Control, vol. 5,
2001, pp. 78-82.
24. Krohling, R.A., Jaschek, H. and Rey, J.P., Designing
PI/PID Controller for a Motion Control System based
on Genetic Algorithm. 12th IEEE International
Symposium on Intelligent Control, 1997, pp. 125-130.
E.H.E. Bayoumi, F. Salem / PID controller for series-parallel resonant converters
25. Gaing, Z.L., A particle swarm optimization approach
for optimum design of PID controller in AVR system,
IEEE Transactions on Energy Conversion, 19(2),
2004, pp. 384–391.
26. Boeringer, D.W., Werner, D.H., Particle swarm
optimization versus genetic algorithms for phased
array synthesis. IEEE Transactions on Antennas and
Propagation, 52(3), 2004, pp. 771–779.
27. Yoshida, H., Kawata, K., and Fukuyama, Y., A particle
swarm optimization for reactive power and voltage
control considering voltage security assessment. IEEE
Transactions on Power Systems, 15(4), 2000, pp.
1232–1239.
28. Microchip Technology Inc., dsPICDEM SMPS Buck
Development
Board
Available:
http://www.microchip.com
29. Müller, S., Marchetto, J., Airaghi, S., and
Koumoutsakos, P., Optimization based on bacterial
chemotaxis. IEEE Transactions on Evolutionary
Computation, vol. 6, no. 1, 2002, pp. 16–29.
79
30. Passino, K.M., Biomimicry of Bacterial Foraging for
Distributed Optimization and Control. IEEE. Control
System Magazine, vol. 22, 2002, pp.52-67.
31. Laskshminarasamma,
N.,
Masihuzzaman,
M.,
Ramanarayanan, V., Steady-state stability of current
mode active clamp ZVS DC-DC converter. IEEE
Transactions on Power Electronics, vol. 25, no. 10,
June 2010, pp. 1546-1555.
Received December 22, 2011
Assoc. Prof. Ehab H.E. Bayoumi
Dr. Fawzan Salem
Department of Power Electronics and Energy Conversion
Electronics Research Institute (ERI)
Cairo, Egypt