Lecture 15 Nyquist Criterion and Diagram
advertisement

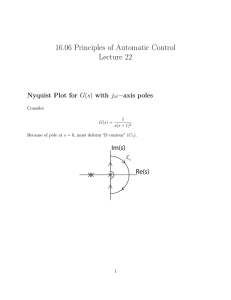
Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 Lecture 15 Nyquist Criterion and Diagram Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 1. Review of System Stability and Some Concepts Related to Poles and Zeros 1. 1 System stability Consider the following closed-loop system: R(s) E(s) + C(s) G(s) _ B(s) H(s) The closed-loop transfer function, T(s), is T (s) = C (s ) G (s ) = R(s ) 1 + G (s ) H (s ) where G (s ) H (s ) is the open-loop transfer function, i.e., the equivalent transfer function relating the error, E(s), to the feedback signal, B(s). The closed-loop poles are the roots of the characteristic equation, i.e., 1 + G (s ) H (s ) = 0 In order that the closed-loop system is stable, all of the closed-loop poles must be in the left half plane (LHP). Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 2 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 1.2 Some Concepts Related to Poles and Zeros For a function F(s) with a variable of s, the poles of F(s) are the values of s such that F (s) = ∞ ; and the zeros of F(s) are the values of s such that F ( s ) = 0 . Please note the above definition is consistent with the definition that we had for the closed-loop poles/zeros and the open-loop poles/zeros. The closed-loop poles/zeros are G (s ) the poles/zeros of the closed-loop transfer function, i.e., ; and the open1 + G (s ) H (s ) loop poles/zeros are the poles/zeros of the open-loop transfer function, i.e., G (s ) H (s ) . Particularly, we have following relationships: the closed-loop poles = the roots of characteristic equation: 1 + G (s ) H (s ) = 0 = the zeros of 1 + G (s ) H (s ) the open-loop poles = the poles of 1 + G (s ) H (s ) As an example, the above relationships can be verified by using G ( s ) H ( s ) = ( s + 1)( s − 3) . s ( s − 2) Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 3 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 2. Cauchy’s Principle of Argument 2.1 Mapping from s-plane to F-plane through a function of F(s) For a point. Taking a complex number in the s-plane and substituting it into a function of F(s), the result is also a complex number, which is represented in a new complex-plane (called F-plane). This process is called mapping, specifically mapping a point from splane to F-plane through F(s). For a contour. Consider the collection of points in the s-plane (called a contour), shown in the following figure as contour A. Using the above point mapping process through F(s), we can also get a contour in the F-plane, shown in the following figure contour B. Case 1: F(s) has one zero, i.e., F ( s ) = s − a Case 2: F(s) has one pole, i.e., F ( s ) = 1 s−a Case 3: F(s) has a number of poles and zeros, i.e, F ( s ) = ( s − z1 )( s − z 2 )L ( s − p1 )( s − p2 )L Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 4 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 2.2 Cauchy’s Principle of Argument The Cauchy’s Principle of Argument states that, if taking a clockwise contour in the splane and mapping it to the F-plane through F(s), The number of clockwise rotations about the origin of the contour in the F-plane, N = The number of zeros of F(s) inside the contour in the s-plane, Z - The number of poles of F(s) inside the contour in the s-plane, P or simply N=Z–P Example 1 Determine the number of clockwise rotations about the origin of the mapping through ( s − 1)( s − 2)( s + 5) . If the contour in the s-plane includes the entire right half ( s − 3)( s + 4) plane, as shown in following figure. F (s) = ∞ ∞ Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 5 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 3. Nyquist Criterion Nyquist Contour: is the contour in the s-plane that includes the entire right half plane, as shown in the proceeding page. Now, let’s consider F ( s ) = 1 + G ( s) H ( s ) and the contour in the s-plane is the Nyquist contour (i.e., the entire right half plane). Applying the Cauchy’s Principle of Argument, we should have The number of rotations about the origin of the mapping through 1 + G ( s) H ( s ) , N = The number of zeros of 1 + G ( s) H ( s ) in the right half plane, Z - The number of poles of 1 + G ( s) H ( s ) in the right half plane, P Please note The mapping through G ( s) H ( s) is virtually the same as the one through 1 + G ( s) H ( s) , except that the contour is shifted one unit to the left. Thus, we can count rotations about -1 instead of rotations about the origin in the above statement. The zeros of 1 + G ( s) H ( s) = the closed-loop poles. The poles of 1 + G (s ) H (s ) = the open-loop poles or the poles of G (s ) H (s ) . Therefore The number of rotations about -1 of the mapping through G ( s) H ( s) , N = The number of closed-loop poles in the right half plane, Z - The number of open-loop poles in the right half plane, P or The number of closed-loop poles in the right half plane, Z = The number of rotations about -1 of the mapping through G ( s) H ( s) , N + The number of open-loop poles in the right half plane, P The above relationship is called the Nyquist Criterion; and the mapping through G ( s) H ( s ) is called the Nyquist Diagram of G ( s) H ( s) For a system to be stable, Z must be zero. Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 6 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 Example 2 The following figures (a) and (b) show, respectively, the Nyquist contour (in which × denotes the location of an open loop pole) and the Nyquist diagram for a control system. Determine the system stability using the Nyquist criterion. (a) Nyquist contour (b) Nyquist diagram Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 7 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 4. Sketching the Nyquist Diagram Suppose the open-loop transfer function G ( s ) H ( s ) = 1 , sketch its Nyquist diagram. 1+ s B C A D Nyquist contour Key Points of the polar plot: ω =0 ω =∞ Cross Re: ω =0 ω =∞ Cross Re: ω =0 ω =∞ ω = 1 rad/s GH ∠GH 1 0 0 -90o See above See above See above See above 0.707 -45o Sketching the Nyquist diagram includes two steps: (1) Sketch the mapping of Point A to Point B, which is the same as the polar plot of frequency response for G ( s ) H ( s ) . Note that the semicircle with a infinite radius, i.e., B-C-D, is mapped to the origin if the order the denominator of G ( s ) H ( s ) is greater than the order the numerator of G ( s ) H ( s ) . (2) Sketch the mapping of Point A to Point D, which is the mirror image about the real axis of the mapping of Point A to Point B. Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 8 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 Example 3 Sketch the Nyquist diagram for the system shown in the following figure, and then determine the system stability using the Nyquist criterion. R(s) E(s) + _ C(s) 500 ( s + 1)( s + 3)( s + 10) Solution: (1) Sketch the Nyquist diagram. The open-loop transfer function: G ( s ) H ( s ) = 500 . ( s + 1)( s + 3)( s + 10) Replacing s with jω yields the frequency response of G ( s) H ( s ) , i.e., G ( j ω ) H ( jω ) = 500 500 = 2 ( jω + 1)( jω + 3)( jω + 10) (−14ω + 30) + j (43ω − ω 3 ) = 500 (−14ω 2 + 30) − j (43ω − ω 3 ) (−14ω 2 + 30) 2 + (43ω − ω 3 ) 2 Magnitude response: G ( jω ) H ( jω ) = Re 2 + Im 2 = 500 (−14ω + 30) 2 + (43ω − ω 3 ) 2 2 Phase response: ( ) − 43ω − ω 3 Im ∠G ( jω ) H ( jω ) = tan −1 = tan −1 2 Re − 14ω + 30 Cross Re: Im = 0 43ω − ω 3 = 0 − (43ω − ω 3 ) = ⇒ 0 (−14ω 2 + 30) 2 + (43ω − ω 3 ) 2 ω =∞ ⇒ ω=0 and ω = 6.56 rad/s Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 9 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 Cross Im: Re = 0 − 14ω 2 + 30 = 0 − 14ω 2 + 30 = ⇒ 0 (−14ω 2 + 30) 2 + (43ω − ω 3 ) 2 ω = ∞ ⇒ Key Points of the polar plot: ω =0 ω =∞ Cross Re: ω =0 ω =∞ ω = 6.56 rad/s Cross Re: ω =0 ω =∞ ω = 1.46 rad/s ω = 1.46 rad/s Nyquist diagram GH ∠GH 16.67 0 0 -270o See above 0.874 See above -180o Im 8.36j 16.67 -0.874 See above 8.36 See above -90o -8.36j (2) Determine the system stability using the Nyquist criterion. Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 10 Re