Impact of slot geometry and rotor position on AC armature losses of
advertisement

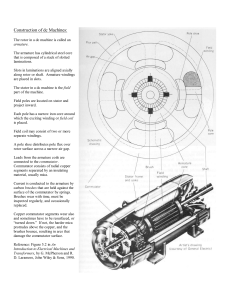
XIX International Conference on Electrical Machines - ICEM 2010, Rome Impact of slot geometry and rotor position on AC armature losses of Interior PM Synchronous Machines S. Hahlbeck, D. Gerling Φ Abstract -- This paper examines the influence of slot geometry in means of the impact of pole shoes at the stator teeth on ac armature losses in concentrated windings of Interior Permanent Magnet (IPM) synchronous machines. It is shown that the rotor position as well as the stator teeth geometry affects the ac armature losses in the concentrated windings. Here a configuration without a pole shoe tends to have higher losses due to the stronger effect of the rotor stray flux onto the stator windings. Index Terms—AC losses, AC machines, Armature losses concentrated winding, Permanent Magnet machines, slot leakage flux, stator pole shoe, Proximity losses I. INTRODUCTION I n applications with high requirements for torque and power density often IPM synchronous machines with concentrated windings are used. For automotive traction drive applications (e.g. hybrid-electrical vehicles) there is also the requirement to have an electric motor based on a production-geared design with low costs. For this it is of high advantage during machine assembly to have no pole shoes at the stator teeth. It enables a process where the preassembled single-tooth windings are mounted directly onto the stator teeth. The assembly process of the stator is much simpler and less cost intensive since two completely independent and fully automatable processes are possible for stator assembly. Major disadvantage of this production-geared stator design can be found in the electromagnetic design of the motor. As is known from [5] the electromagnetic torque of an IPM synchronous machine is dependent on the air gap length. The air gap length is a function of the nominal air gap length, the width of the slot opening and the slot pitch. The slot opening width and the slot pitch are usually expressed by the Carter-Factor. When omitting the pole shoes the Carter Factor will increase and the torque constant of the motor will decrease at the same time. Furthermore cogging torque and torque ripple will increase due to the salient pole design in the stator. Usually skewing is necessary to decrease cogging torque and torque ripple again. By skewing the rotor or stator the torque constant drops even further. These are effects which decrease the torque and power density of the machine. This is in contrast to the goal of designing a motor with very high torque and power density. Therefore a compromise out of raw material costs and production driven costs is to be found. In this paper a second impact caused by a stator pole design without pole shoes is investigated – the higher ac Steffen Hahlbeck is with the Dept. of Advanced Engineering, Daimler AG, 70546 Stuttgart Germany (e-mail: steffen.hahlbeck@daimler.com). Dieter Gerling is head of the institute of electrical drives at the Univ. of Federal Defense Munich, 85577 Neubiberg Germany (e-mail: Dieter.Gerling@unibw.de). 978-1-4244-4175-4/10/$25.00 ©2010 IEEE armature losses in the stator windings. In [1] the proximity losses of Switched Reluctance Machines (SRM) were analysed. Inherent to the functional principle of SRM the rotor stray flux has a very strong impact onto the proximity losses in the windings when the rotor position changes from unaligned to aligned position. In [3] and [4] an analytical model is presented for calculations of proximity losses for Surface Permanent Magnet (SPM) synchronous machines and results are compared with finite element (FE) calculations. The impact of rotor stray flux is omitted in both the analytical and FE model. Since the analysis in this paper is done for IPM synchronous machines, which represent a hybrid of the SRM and the SPM, the rotor stray flux is to be considered when calculating the ac armature losses. DEFINITION OF PROXIMITY, AND SLOT LEAKAGE LOSSES Proximity losses are caused by the effect of not uniformly distributed current density in the wire cross section when another nearby wire is energized with a high frequency current. This effect comes from the impact of the magnetic field of the second wire onto the regarded wire, when both wires are placed in free air. This not uniformly distributed current density (the current density is higher at parts of the surface of the wire than inside the wire) leads to increased losses in the AC case versus the DC case. The slot leakage effect is the effect of not uniformly distributed current density in the wire cross section coming from the magnetic leakage field crossing the slot cross section of an electrical machine because of the finite magnetic conductivity of the iron material and the (usually quite small) slot opening. The slot leakage effect can be amplified by the rotor flux of a permanent magnet rotor when the rotor flux crosses the slot opening and superimposes the slot leakage flux. Both, proximity losses and slot leakage losses, can occur in the windings of IPM machines of the type regarded here. The skin effect is neglected since frequencies and wire diameters are too small in the considered applications. II. III. STUDY ASSUMPTIONS For the analysis an IPM synchronous machine design with 20 poles and 24 stator slots is chosen. This slot / pole combination has a very high winding factor and low cogging torques as well as torque ripples [2]. The major measures and definitions of the motor are provided in Table I. The motor design is analysed by using 2D Finite Element Method (FEM) and transient analysis. The ac armature losses in the windings are calculated by using a quarter model of the motor (see Fig. 1). The model is solved in 45 loadsteps. For every loadstep the rotor is rotated one mechanical degree in counter clockwise direction. TABLE I Rotor poles 20 Active length [mm] 70 Stator slots 24 Air gap length [mm] 0.8 Slot-per-phase-per pole 0.4 Winding factor 0.933 Stator OD [mm] 290 Slot fill factor [%] 50.6 Air gap diameter [mm] 229.2 Slot opening width [mm] 5.5 In that way the model takes into account the movement of the rotor as well as saturation effects in the teeth and rotor bridges. The single wires of one coil of phase A are connected to an electrical circuit which simulates each wire with its active length and connects the whole coil to a sinusoidal current source. All other coils are treated the same way as it is done for static simulations. The load in these coils is applied as a current density on each wire. By calculating armature losses just in one coil of the machine, complexity in pre-processing and simulation time are decreased dramatically. An investigation in [1] showed an error in overestimating the ac losses of about 20 % by this simplification. this a very fine mesh is needed for the wires and within the slot. As a useful comparison unity the results are displayed as ohmic losses for one coil or coil side. The losses in the end windings are neglected here since the current distribution from the 2D FEM is not valid within the end windings. In Fig. 2 the ac versus dc losses for one coil of the two models as a function of rotor position are presented. In the model with pole shoes the losses are increased due to ac effects by a factor of 1.64 to 13.1 W. For the model without pole shoes it is even a factor of 2.01 which results in total losses for the coil of 16.1 W. 35 AC+DC losses with pole-shoe AC+DC losses without pole-shoe DC losses 30 25 Pv [W] MAJOR MEASURES AND DEFINITIONS OF THE ANALYSED MOTOR 20 15 10 5 0 5 10 15 20 25 30 35 40 delta [°mech] Fig. 2 Comparison of ac + dc to dc losses for different rotor positions Fig. 1 Quarter model of the machine with pole shoes at the stator teeth As working point for the analysis a speed of 5000 rpm at a load of 20 Nm is chosen. At this speed the electrical frequency is 833 Hz. The phase current is 86 Arms. The machine has a concentrated double-layer winding with four parallel paths per phase and two coils in series per path. So the current in the analysed coil becomes 21.5 Arms. Each coil consists of 24 windings and is wound with 3 strands in hand, where each strand wire has a diameter of 1.18 mm (pure copper). Neglecting the resistance of the end-windings, which are not modelled in 2D analysis, one coil has a resistance of 0.017 Ω. This results in DC losses of 8 W for one coil in average. After analysing the original design with pole shoes the model geometry is changed. The pole shoe at each stator tooth is cut away and the analysis is repeated using identical boundary conditions. IV. ANALYSIS RESULTS The results from the FEM simulations are among others the current density distributions in each wire of the coil. For Both models show high losses during rotor positions with low phase currents. This means the circulating eddy currents due to slot leakage flux and proximity effect never become zero even though the total phase current in the coil is zero. For these rotor positions with very low currents the ac loss characteristic of the two models is almost identical. This is due to the fact that the slot leakage flux is the same for both cases. The rotor positions in between 15°mech and 24°mech show higher slot leakage flux for the model without stator pole shoes. These are rotor positions with high values of dΦ/dt in the air gap. This occurs when the next rotor pole moves along the coil or in other words when the first coil side is opposite to the rotor q-axis. Here in case of the tooth with pole shoes the rotor flux is transferred within the pole shoe and does not affect the winding layers as strong as it is the case for the stator without pole shoes. In Fig. 3 the loss distribution separated for each coil side is shown. Since the rotor moves counter clockwise the rotor poles move from the lower to the upper coil side in the model. The lower coil side has higher losses – in numbers 35 %. As known from the investigations in [1], the coil side at the stator pole which is first penetrated by the rotor stray flux has the higher losses. These losses are located almost only in the two winding layers closest to the air gap as can be seen from Fig. 4. In the first winding layer eddy currents show high values for both current directions even though the phase current has its amplitude in positive direction (out of the plane). All lower layers just influence each other as examined in [3]. 20 upper coilside lower coilside 18 16 14 Pv [W] 12 10 8 6 4 2 0 5 10 15 20 25 delta [°mech] 30 35 40 Fig. 3 Comparison of losses in upper and lower coil side for the model without pole shoes. low phase currents the efficiency drop is not as high as expected from the increase of ac to dc losses, which is 100%. Nevertheless due to the higher losses in the windings the continuous power of the machine will be significantly lower. When deciding for a manufacturing method of the concentrated windings the drop of 2 % in machine efficiency, as represented by this working point, is to be compared with the cost-benefits in manufacturing costs and the effects in the overall system efficiency of the powertrain. For sure the motor active length needs to become longer if the same maximum torque shall be reached. The investigated motor without pole shoes has an 11 % lower maximum torque. This would be exactly the increase in active length needed. VI. CONCLUSIONS By transient FE analysis the impact of the rotor stray flux on the ac armature losses in the windings of an IPM synchronous machine was shown. Two different stator configurations, one with stator pole shoes and one without the pole shoes were analysed. The results show 22 % higher ac losses in the configuration without pole shoes. The possible cost-benefits of the production-geared design (stator design without pole shoes) are paid with a lower motor efficiency due to higher ac winding losses and with lower maximum torque due to the increase in the effective air gap length. Fig. 4 Current densities in coils at 18°mech for the model without stator pole shoes. V. DISCUSSION OF RESULTS The results of the FE simulations show the strong impact of rotor stray flux of IPM synchronous machines onto ac armature losses in the windings when simplifying the stator pole design. As mentioned earlier the wide slot opening of the machine without pole shoes increases the Carter Factor which results in a lower torque constant. This is a main disadvantage for low speeds till base speed. In the field-weakening area, when the electrical frequency becomes the main reason for losses in the means of iron losses, the efficiency decreases further due to higher ac losses in the windings. In measurements for the machine with pole shoes at this working point, a machine efficiency of 80 % was reached. This quite low efficiency for an IPM machine is caused by the low dc-link voltage which is available in the use-case of a hybrid-electrical vehicle. For that the machine is in high field-weakening area at a speed of 5000 rpm which results in a low efficiency at low loads due to high iron and copper losses. Iron losses could be reduced here by a lower number of poles. But due to the available cross-section for the machine design, which is a thin ring in between a diameter of 199 mm (inner rotor diameter) and 290 mm (outer stator diameter), the yokes in rotor and stator become very thin and a higher pole number is to be chosen. The simulation results yield even to an increase of 22 % in copper losses when omitting the pole shoes compared to the model with pole shoes. From this the machine efficiency for the investigated working point becomes 78 %. Due to the VII. [1] [2] [3] [4] [5] REFERENCES C. Carstensen, “Eddy Currents in Windings of Switched Reluctance Machines” Ph.D. dissertation, Dept. of Electrical Eng., RWTH Aachen, 2007 F. Magnussen, H. Lendenmann, “Parasitic Effects in PM Machines with Concentrated Windings”, IEEE Trans. on Industry Applications Vol. 43 No. 5, Sep./Oct. 2007 P. B. Reddy, Z. Q. Zhu, S.-H. Han and T. M. Jahns, “Strand-Level Proximity Losses in PM Machines Designed for High-Speed Operation”, ICEM 2008, 2008 P. B. Reddy, T. M. Jahns, A. M. El-Refaie, „Impact of Winding Layer Number and Slot/Pole Combination on AC Armature Losses of Synchronous Surface PM Machines Designed for Wide ConstantPower Speed Range Operation“, Industry Appl. Society Annual Meeting, 2008 Vogt, Karl, et al.: “Berechnung elektrischer Maschinen”, 6th ed., Wiley-VCH Verlag, Weinheim, 2008 VIII. BIOGRAPHIES Steffen Hahlbeck, born in 1981. He studied Electrical Engineering at the University of Applied Sciences, Mittweida, Germany, where he got his degrees as B.Eng. and M.Sc. in 2004 and 2006, respectively. His employment experience includes the series development and advanced engineering for electrical drives at Daimler AG, Sindelfingen and Stuttgart, Germany. Dieter Gerling, born in 1961, got his diploma and Ph.D. degrees in Electrical Engineering from the Technical University of Aachen, Germany in 1986 and 1992, respectively. From 1986 to 1999 he was with Philips Research Laboratories in Aachen, Germany as Research Scientist and later as Senior Scientist. In 1999 Dr. Gerling joined Robert Bosch GmbH in Bühl, Germany as Director. Since 2001 he is Full Professor and Head of the Institute of Electrical Drives at the University of Federal Defense Munich, Germany.