Physics Rotational Motion Problems
advertisement

n
t
O
ω
30
α
0.4 m
B
A
0.1m
0.1m
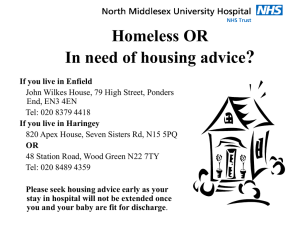
Figure 1: Problem 2
1. A torque applied to a flywheel causes it to accelerate uniformly from a
speed of 200 rev/min to a speed of 800 rev/min in 4 seconds. Determine
the number of revolutions N through which the wheel turns during this
interval.
Solution. The angular acceleration α during this interval is
α=
(800 − 200)/60
= 2.5 rev/s
4
Integrating α in terms of t gives the angular velocity ω
Z t
αdt = ω = 2.5t + (200/60)
0
Integrating the expression for ω in terms of t gives the angle in the number
of revolutions θ.
Z t
ωdt = θ = (2.5)t2 /2 + (200/60)t
0
Substituting t = 4 into the expression of θ gives
θ = 33.3 rev
2. The T-shaped body rotates about a horizontal axis through point O. At
the instant represented, its angular velocity is ω = 3 rad/s and its angular
acceleration is α = 14 rad/s2 in the directions indicated. Determine the
velocity and acceleration of (a) point A and (b) point B. Express your
results in terms of components along the n- and t-axes shown.
Solution. Using the right-hand rule gives
ω
α
= 3(et × en ) rad/s
= −14(et × en ) rad/s2
1
(1)
(2)
B
b
b
C
A
a
x
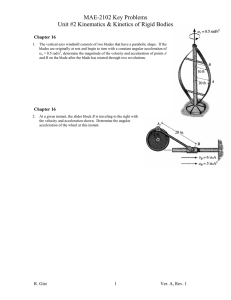
Figure 2: Problem 3
(a) The position vector from O to A is
r A = −0.4en m
(3)
The velocity and acceleration vector are
vA
= ω × (−0.4en )
= 3(et × en ) × (−0.4en )
= 1.2et m/s
aA
= α × rA + ω × {ω × (−0.4en )}
= −14(et × en ) × (−0.4en ) + 3(et × en ) × (1.2et )
= −5.6et + 3.6en m/s2
(4)
(5)
(b) The position vector from O to B is
r B = −0.4en + 0.1et m
(6)
The velocity and acceleration vector are
vB
= ω × (−0.4en + 0.1et )
= 3(et × en ) × (−0.4en + 0.1et )
= 1.2et + 0.3en m/s
aB
(7)
= α × rB + ω × {ω × (−0.4en + 0.1et )}
= −14(et × en ) × (−0.4en + 0.1et ) + 3(et × en ) × (1.2et + 0.3en )
= −6.5et + 2.2en m/s2
(8)
3. Point A is given a constant acceleration a to the right starting from rest
with x essentially zero. Determine the angular velocity ω of link AB in
terms of x and a.
Solution. The given motion of A is ẍ = a. The accompanying motion of
angle θ between the link AB and the vertical line is given by
sin θ =
x
2b
Differentiating gives
ω cos θ =
2
ẋ
2b
(9)
(10)
where
√
p
4b2 − x2
2
cos θ = 1 − sin θ =
2b
(11)
ẋ = at
(12)
The velocity of A is
We assume that A is located at x with t = ∆t. Therefore,
r
√
2x
∆t =
, ẋ(∆t) = 2ax
a
ω is
ω=
√
ẋ
2ax
=√
2b cos θ
4b2 − x2
3
(13)
(14)