Lecture 11 complete notes - College of Engineering, Michigan State
advertisement

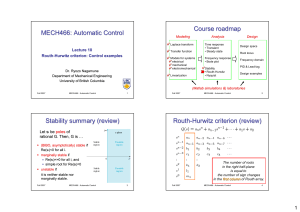
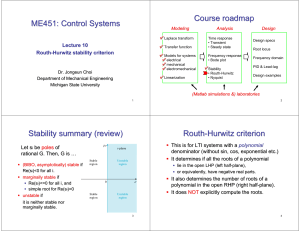
Course roadmap ME451: Control Systems Modeling Analysis Laplace transform Lecture 11 Routh-Hurwitz criterion: Control examples Transfer function Models for systems • electrical • mechanical • electromechanical Block diagrams Linearization Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Time response • Transient • Steady state Frequency response • Bode plot Stability • RouthRouth-Hurwitz • Nyquist Design Design specs Root locus Frequency domain PID & LeadLead-lag Design examples (Matlab simulations &) laboratories 1 Stability summary (review) 2 Routh-Hurwitz criterion (review) Let si be poles of rational G. Then, G is … (BIBO, asymptotically) stable if Re(si)<0 for all i. marginally stable if Re(si)<=0 for all i, and simple root for Re(si)=0 unstable if The number of roots in the right halfhalf-plane is equal to the number of sign changes in the first column of Routh array. it is neither stable nor marginally stable. 3 4 Example 1 Example 1: K(s)=K Characteristic equation Routh array Design K(s) that stabilizes the closed-loop system for the following cases. K(s) K(s) = K (constant) K(s) K(s) = KP+KI/s (PI (Proportional(Proportional-Integral) controller) 5 Example 1: K(s)=KP+KI/s 6 Example 1: Range of (KP,KI) Characteristic equation From Routh array, 3.5 Routh array 3 2.5 2 1.5 1 0.5 0 -1 7 0 1 2 3 4 5 6 7 8 9 8 Example 1: K(s)=KP+KI/s (cont’d) Select KP=3 (<9) Routh array (cont’d) Example 1: What happens if KP=KI=3 Auxiliary equation 2 1.8 1.6 1.4 1.2 Oscillation frequency 1 0.8 0.6 Period If we select different KP, the range of KI changes. 0.4 0.2 0 0 2 4 6 8 10 9 Example 2 12 14 16 18 20 Unit step response 10 Example 2 (cont’d) Determine the range of K and a that stabilize the closed-loop system. 11 12 Example 2 (cont’d) Example 2 (cont’d) Characteristic equation Routh array If K=35, oscillation frequency is obtained by the auxiliary equation 13 Summary and Exercises 14 More example 1 Control examples for Routh-Hurwitz criterion P controller gain range for stability Routh array PI controller gain range for stability Derivative of auxiliary poly. Oscillation frequency Characteristic equation Next 2 Time domain specifications (Auxiliary poly. is a factor of Q(s).) Q(s).) Exercises No sign changes in the first column 15 No root in OPEN(!) RHP 16 More example 2 More example 3 Routh array Routh array Derivative of auxiliary poly. 4 4 2 Derivative of auxiliary poly. 0 4 No sign changes in the first column No root in OPEN(!) RHP 17 One sign changes in the first column One root in OPEN(!) RHP 18