Synchronous Generator Subtransient Reactance
advertisement

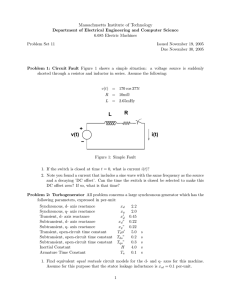
Synchronous Generator Subtransient Reactance Prediction Using Transient Circuit Coupled Electromagnetic Analyses & Odd Periodic Symmetry Joshua Lorenz Kato Engineering Inc., North Mankato, MN John T. Fowler Kato Engineering Inc., North Mankato, MN Abstract For synchronous 3 phase electrical generator machine design, the ability to predict the subtransient reactance of a particular machine design is of prime importance. The subtransient reactance has a significant impact on the magnitude of the fault currents generated within the machine during an event such as a 3 phase short-circuit. Power system designers routinely use the generator subtransient reactance as a key parameter to aid in the design of the complete power generation system. For new generator designs the subtransient reactance is routinely tested for as part of a thorough evaluation of the generator performance characteristics. In this paper, a method is presented to calculate the subtransient reactance of a particular generator design using transient circuit coupled finite element electromagnetic analyses. The finite element modeling technique presented utilizes odd periodic symmetry along with a ‘moving’ interface at the rotorstator air-gap. The use of odd periodic symmetry allows for the simulations to be accomplished with half of the model size as compared to even periodic symmetry. The calculated generator subtransient reactance from the finite element modeling technique presented is compared to generator test data as well as previous calculation methods. Other key pieces of information which may be generated throughout the process are also documented, such as calculated voltage harmonics and the open-circuit saturation curve. Introduction Kato Engineering primarily manufactures synchronous 3 phase electrical generators. The ability to predict the subtransient reactance of a particular generator design is of prime importance. Power system designers routinely use the generator subtransient reactance as a key parameter to aid in the design of the complete electrical power generation system. The subtransient reactance, X”d, is the generator internal impedance element that is effective in the first cycles of a transient load event and determines the magnitude of the instantaneous fault current from the generator. The transient reactance, X’d, becomes effective after approximately 6 cycles into a transient load event and determines the amount of voltage change seen at the generator terminals due to the step change in load. As stated, the reactances of a generator have a direct effect on the transient fault currents experienced in an electrical power generation system, as well as the motor starting capability of the generator. The magnitudes of the fault currents need to be calculated so that breakers, etc. can be sized accordingly. The peak magnitudes of the 3 phase fault currents are inversely proportional to the subtransient reactance of the generator. For new generator designs, the transient and subtransient reactances are routinely tested for as part of a thorough evaluation of the generator’s performance characteristics. Traditional reactance prediction methods have served engineers well when new designs closely mimic previous designs which have been tested and their reactance predictions validated. From the perspective of the machine designer, an uncomfortable level of uncertainty always accompanied a new design that deviated significantly from standard form. In this paper, a method is presented to calculate the transient and subtransient reactance of a generator using transient dynamic circuit-coupled finite element electromagnetic analyses. Finite Element electromagnetic analysis offers a powerful tool to reduce the risk in new generator design. A series of Finite Element (FE) electromagnetic simulations were performed in order to generate the following simulation data: • Open-Circuit Saturation Curve • Generator Voltage Signal Harmonics • Generator Transient and Subtransient Reactance The open-circuit saturation curve and voltage signal harmonics were obtained from the magnetostatic model and the reactance calculations were based upon results from a transient circuit-coupled model with a moving interface at the rotor-stator air gap. The voltage signal harmonics were also calculated with the transient circuit-coupled model, for comparison. The transient circuit-coupled finite element modeling technique presented utilizes odd periodic symmetry along with a ‘moving’ interface at the rotor-stator air gap. The use of odd periodic symmetry allows for the simulations to be accomplished with half of the model size as compared to even periodic symmetry. The particular generator design used for these analyses is a Kato Engineering, salient pole, 3 phase, 60 Hz, 13.8 kV synchronous generator. The generator rotor is a 4-pole rotor with a normal operating speed of 1800 RPM. The generator is rated for 4.5 MW of output power at 0.8 Power Factor with a temperature rise of 95ºC at an ambient temperature of 50ºC. The generator is approximately 7 ft wide by 10 ft tall by 11 ft long. Figure 1 shows a view of the generator assembly. One of the reasons this design was chosen for analysis was the fact there is a plethora of good test data in existence for this design. Figure 1. Generator Assembly View Model Information For all of the simulations performed, the portion of the generator assembly modeled is commonly referred to as the ‘active’ region of the generator rotor and stator. The ‘active’ region is comprised of the generator rotor and stator ‘stacks’ along with their respective windings. The models are all 2D models with periodic symmetry. The model covers 1 pole of a 4 pole generator (i.e. 90 degrees). The rotor shaft is included in the rotor portion of the model, and the stator portion of the model is bounded by the outer diameter of the laminated stator stack. Figure 2 shows a view of the 2D geometry which was utilized for all of the simulations. The geometry was created in Pro/Engineer and transferred to ANSYS via an IGES file transfer. The simulated ‘length’ of the model was 33.5 inches. This is representative of the stack lengths for the rotor and stator. Figure 2. Generator Modeled Geometry The circuit-coupled models utilized the circuit which is shown in Figure 3. The 1-pole model encloses half of a parallel circuit for the stator windings. The stator phase windings present in the model are A+, B+, Band C-. Therefore the circuit contains four circuit-coupled stator winding elements. For the open-circuit voltage harmonics simulation, the phase leakage inductors were effectively removed from the coupled circuit via voltage coupling constraints across each inductor. The rotor field windings are coupled to the circuit, and so are the rotor damper bars. Figure 3. Generator Coupled Circuit The circuit construction and portions of the model building process were handled via an APDL input file which was read into ANSYS with the use of the /INP command functionality. The element, material property, and real constant specifications were all defined in the APDL file. Elements Three basic element types were used in the models. The table below shows the element types that were used and a general description of where they were used in the models Table 1. Element Type Tabular Listing ANSYS Element Type Where Used PLANE53 Rotor shaft, rotor lamination, rotor windings, rotor damper cage, air regions, stator lamination, stator windings, stator slot sticks CIRCU124 All circuit elements MESH200 For mesh controls and circuit connection ‘dummy’ wires. The same element mesh was used for the magnetostatic model and the circuit-coupled models. The mesh contained 9,636 elements and 29,564 nodes (excluding the circuit elements and nodes). Figure 4 shows a view of the element mesh (excluding the circuit elements). The mesh is not connected at a boundary arc between the rotor and stator elements. The boundary arc resides at the middle of the ‘air-gap’ between the rotor and stator. Figure 4. Generator Element Mesh Material Properties For all of the simulations there were 3 unique magnetic materials, each with their own B-H curve. Figure 5 shows the B-H curves for the magnetic materials listed below: • Rotor laminations – 16 Gage ASTM A715 Grade 80 • Stator laminations – 26 Gage M27 C3 (adjusted) • Rotor shaft – AISI 1045 steel Figure 5. Simulation B-H curves The B-H curve for the stator laminations was adjusted from the vendor material property data in order to account for the fact the stator core is vented. For this design the stator core has (12) integral vents. The vents have an axial width of 0.375 inches. Therefore, over the active stack length of the machine (33.5”) the stator core only has 29” of active lamination material in the axial direction. The fraction of the stack length which is comprised of stator lamination material is 0.8657 (29/33.5). The actual stator lamination flux densities in reality are 1.155x those calculated from the 2D model (1/0.8657 = 1.155). The B-H curve of the stator lamination material is adjusted so that the correct magnetic induction (H) is required in order to produce the flux densities which would be seen in reality. The mathematical B-H curve adjustment is based solely upon the fraction of stator stack length active material (i.e. 0.8657). The open-circuit saturation curve from the magnetostatic model was developed with and without the ‘stator vent correction’ in order to see how the stator vent correction affects the results. The air regions, rotor and stator winding regions, stator slot stick regions, and damper cage element regions of the model were all assumed to have a relative magnetic permeability of 1.0. For the circuit-coupled models, the winding resistances for the circuit coupled winding elements were taken from one of our in-house generator spreadsheet design programs. The program calculates expected winding resistances based upon the design input parameters of the generator. The calculated cold winding resistances were used because the generator reactance test is normally conducted on a ‘cold’ generator. The ‘fill factors’ of the rotor and stator coils were back-calculated based on the given winding resistance, winding length, number of turns, geometric area, and cold resistivity in order that the ANSYS calculated winding resistances match the specified winding resistances from the Kato Engineering in-house design program. The equation used by ANSYS for winding resistance based upon fill factor, number of turns, geometric area, length, and resistivity is shown below: R= ρ × L × turns × FF area The circuit-coupled solid conductor elements, which represent the damper bars of the generator rotor, used the cold resistivity of copper in the solid conductor element specification. Boundary Conditions & Model Details For all models, odd-periodic symmetry constraints were applied to the periodic edges of the model (i.e. the boundary lines at 45 and 135 degrees). The constraints were applied via the use of the PERBC2D command. Odd-periodic symmetry was required because the model encompasses only a single polarity for the rotor poles. A model of twice the angular span (i.e. 180 degrees and 2 rotor poles) would allow for the use of even-periodic symmetry. However, even-periodic symmetry is not required to obtain all of the necessary simulation information and the use of odd-periodic symmetry allows for more efficient models. For all models, An Az = 0 constraint was applied at the OD of the stator laminations. This constraint can also be described as a ‘flux parallel’ constraint. For the magnetostatic model a uniform current density is applied to each side of the rotor field winding. A positive current density was used on the left hand side, and a negative current density was used on the right hand side (see Figure 2). Fifteen different current densities were used on the magnetostatic model in order to generate the open-circuit saturation curve. Each unique current density corresponds to a certain amount of ampere-turns of rotor field excitation. For the circuit-coupled transient dynamic models, the rotor field excitation was driven by a fixed DC voltage source connected to the circuit-coupled rotor field windings. The DC source voltage was set such that the ampere-turns generated in the rotor resulted in the nominal open-circuit voltage at the generator output terminals. The nominal open-circuit phase voltage is 7,967 Volts line to neutral (i.e. 13.8kV line to line). The circuit-coupled transient dynamic models also employ several voltage coupling equations and voltage constraints. All of the ‘grounded’ nodes in the coupled circuit have a zero voltage DOF constraint. All of the nodes on the right hand side of the solid conductor elements (i.e. damper cage conductor elements) have coupled voltage DOF. A coupling equation is also used, for cosmetic purposes, to couple the fixed DC voltage source to the rotor field winding elements. The coupled circuit contains a leakage inductor for each phase of the output voltage. The leakage inductor is used in the coupled-circuit in order to account for the leakage reactance of the generator armature. The leakage reactance of a generator armature can be categorized by 4 different armature leakage flux components [1]: • Slot leakage flux –The flux in the stator that does not completely encompass the stator slot by crossing the stator slot. Flux leakage increases with narrower slot and deeper slot. • Zig zag leakage flux – The flux that ‘zigzags’ across the air gap from tooth to tooth and never links the stator winding. Flux leakage increases with smaller air gap and wider teeth with respect to the slot pitch. • Belt leakage flux – Considered negligible in 3 phase synchronous machines. • End-connection leakage flux – The stator flux that is generated in air surrounding the stator end windings. Flux increases with the axial length of the coils with respect to the stack length. All but the end-connection leakage flux are accounted for in the Finite Element model. For this reason, the leakage inductors are added to each phase of the output voltage circuit in order to account for the armature end-connection leakage reactance. The inductance value used for the leakage inductors is based on a fraction of the total calculated armature leakage reactance. Inductance (L) and reactance (X) are related by the formula for inductive reactance, as shown below [2]: L= X ω Kato Engineering’s in-house design programs calculate the total armature leakage reactance based on the input design parameters of the generator. For the 3 phase short-circuit simulation the short-circuit fault is simulated by applying a zero voltage DOF constraint at the output terminals on the coupled circuit. The output terminal nodes correspond to the nodes on the right hand side of the inductor elements. For the magnetostatic model, the rotor and stator meshes are connected by the use of the CEINTF command. The CEINTF command effectively couples the Az DOF between the rotor and stator regions in the static model. For the dynamic models, the rotor/stator moving interface is dealt with via the use of a macro titled ‘ODDSLIDE’. The macro was written by the author, and is similar in functionality to the ‘SLIDE’ macro which is not documented, but supported to an extent by ANSYS. The ‘SLIDE’ macro does not support odd-periodic symmetry and can only be used for even-periodic symmetry models. The ‘ODDSLIDE’ macro allows for the use of odd-periodic symmetry (i.e. ½ the model size) and is discussed in further detail in the next section. For all but one of the transient dynamic models a time step increment of 750 microseconds was used for the simulations. This equates to an angular step of 8.1 degrees for the 1800 RPM machine, and a ‘sampling frequency’ of 1.33 kHz. The time stepping used was a compromise between solution fidelity and solution run time. The period of oscillation for the output voltage and current of the machine is approximately 16.7 milliseconds (i.e. 60 Hz). Therefore, the time stepping used results in roughly 22 solutions per period of oscillation. Another iteration of the transient dynamic model was performed with a time step increment of 130.2 microseconds (i.e. 7.68 kHz sampling frequency) in order to verify the open-circuit voltage signal harmonics which were calculated via the magnetostatic model. The generator voltage harmonics test data is available out to the 39th harmonic which has a frequency of 2.34 kHz. Dynamic Solution Routine In order to perform the circuit-coupled transient dynamic simulations using odd-periodic symmetry, a fairly detailed approach was used to carry out the simulation process. For all of the transient dynamic circuitcoupled simulations the solution process was started with a static solution obtained while the rotor and stator sections of the model were aligned. After the static solution, time integration was turned on and the time-stepping solution loop was carried out. The basic steps of the solution loop employed are listed below: • Identify the new rotor position in absolute degrees • Enter /prep7 • Call the ‘oddslide’ macro with the new absolute rotor position • Enter /solu • Set the analysis type to RESTART • Define the time of the new solution • Solve The basic loop shown above was repeated for each time step increment. For the short-circuit simulation the ‘output’ side of the inductor nodes (on the coupled circuit) were grounded at a particular time in the simulation loop. The grounding was accomplished by constraining the node voltage DOF to zero. The simulation loop was then continued with the grounded output terminals (i.e. 3 phase short-circuit). ’oddslide’ Macro The primary function of the ‘oddslide’ macro was to provide connectivity between the rotor and stator meshes at the air-gap line, given a displaced position of the rotor. The rotor and stator mesh densities need not be identical at the interface. The dissimilar meshes are handled with the CEINTF command within the ‘oddslide’ macro. Since only a single polarity of the rotor poles is included in the FE mesh, the macro must consider the absolute location of the displaced rotor in order to determine whether a ‘positive’ or ‘negative’ rotor pole is residing beneath the stationary portion of the FE mesh. In its simplest form, if a ‘positive’ pole is residing beneath the stator mesh the mesh coupling can be described as Az = Az or ‘even’ coupling. If a negative pole is residing beneath the stator mesh the mesh coupling can be described as Az = -Az or ‘odd’ coupling. This latter type of ‘odd’ coupling essentially reverses the polarity of the rotor pole as seen by the stator mesh. Figure 6 shows a very simplified flowchart of the process used in the ‘oddslide’ macro. Figure 6. ‘oddslide’ Macro Flowchart Analysis Results & Test Data Comparison All of the analyses were performed with ANSYS 10.0 on an Intel 32-bit system running Windows XP Professional. The machine was equipped with dual Xeon 3.06 GHz processors and 2.0 GB of RAM. Open-Circuit Saturation Curve Figure 7 shows a comparison of the simulation results and test data for the open-circuit saturation curve. A series of magnetostatic simulations were run with varying field current, to obtain the simulation results shown below. The generator armature phase voltage is calculated from each of the magnetostatic simulation results via the following formula [1], where the last two quantities ([Az.2-Az.1] x Ls) are equivalent to the flux per pole: VPH = 4.0 × f × f b × k D × k P × N × (A Z.2 − A Z.1 )× L S • f – output frequency • fb – form factor (1.11 for a perfect sine wave) • kD – winding distribution factor • kP – pitch (chord) factor • N – turns per phase • (AZ.2 - AZ.1) – difference in air-gap magnetic vector potential (per unit length) at adjacent quadrature axes • LS – generator stack length The output frequency, winding distribution factor, pitch factor, turns per phase, and generator stack length are all parameters which come from the Kato Engineering in-house spreadsheet design program for a given electrical machine design. The difference in air-gap magnetic vector potential at adjacent quadrature axes comes from the FE model results. The predicted field current required to produce rated voltage in the generator was 65.9 amps from the magnetostatic simulation. The actual field current required to produce rated voltage in the generator during Factory Acceptance Tests (FAT) was 66.2 amps. The percent error of the simulation prediction was 0.45%. The predicted open-circuit field currents from the Kato Engineering in-house spreadsheet design programs were 61.4 amps and 78.6 amps. The former prediction comes from our design program which is used on most new R&D projects and the latter prediction comes from our more standard design program which employs ‘test data correction’ after a design is built and tested. The R&D spreadsheet program is generally more accurate for ‘out of the box’ predictions of this type. Figure 7. Open-Circuit Saturation Curve Comparison Generator Voltage Signal Harmonics The simulation no-load voltage signal harmonics can be calculated from the magnetostatic simulation results via the use of the air-gap radial flux plot. Figure 8 shows the radial flux pattern versus path length along the air-gap of the machine, from the magnetostatic simulation results. The flux pattern is transformed from the time domain to the frequency domain via the use of a Fast Fourier Transform (FFT). The frequency domain magnitudes are normalized by the fundamental frequency (i.e. 1st harmonic). Each flux wave harmonic fraction is then multiplied by a pitch factor, distribution factor, and skew factor in order to calculate the individual voltage harmonics, expressed in percent. For this calculation there are unique pitch, distribution, and skew factors calculated for each individual flux wave harmonic based upon the number of poles, stator slots, throw, pitch percentage, skew, and phases. The total harmonic distortion (THD) is calculated by evaluating the square root of the sum of the squares of the individual harmonics (excluding the fundamental). Figure 8. Radial Air-Gap Flux versus Path Length The no-load voltage signal harmonics can also be calculated from the transient open-circuit simulation results by performing a Fast Fourier Transform directly on the simulation output voltage signal. The individual harmonic magnitudes from the FFT are once again normalized by the fundamental harmonic magnitude and the THD is calculated in the same manner as explained above. Figure 9 shows the transient open-circuit simulation output voltage signals. Figure 9. Transient Simulation Open-Circuit Voltage Figure 10 shows a tabular comparison of the no-load line to neutral (L-N) phase voltage signal harmonics from the simulation predictions and from the actual test data voltage signal harmonics measured in the generator FAT. The predicted peak individual harmonic was 0.99% and 1.03% for the 5th harmonic from the magnetostatic and transient simulations, respectively. The peak individual harmonic from the generator test data was 0.94% for the 5th harmonic. The predicted total harmonic distortion (THD) was 1.336% and 1.490% from the magnetostatic and transient simulations, respectively. The THD from the generator test data was 1.340%. The R&D spreadsheet program predicted a peak individual harmonic of 1.105% and a THD of 1.431%. Figure 10. Generator Voltage Harmonics Comparison Generator Transient and Subtransient Reactance Figure 11 shows a tabular comparison of the predicted and tested generator reactance values. The predicted transient reactance from the simulation was 10.0% and the transient reactance calculated from the actual test data was 11.2%. The predicted subtransient reactance from the simulation was 8.6% and the subtransient reactance calculated from the test data was 9.1%. The predicted transient and subtransient reactances from the R&D spreadsheet program were 15.3% and 12.8%, respectively. It is more convenient for electrical design engineers to express circuit values in percent or even per unit terms. To convert to actual ohmic values for the reactances, multiply the percentages (in decimal format) by the ‘base’ impedance (which is derived from rated voltage and current). Figure 11. Generator Reactance Comparison For the generator FAT, the transient and subtransient reactances are calculated individually for 3 separate current traces taken from 3 unique applications of a three phase fault. The results from the 3 calculations are averaged for the final reported values. The test operators try to achieve a balanced fault current trace as this makes the calculation process more reliable. For the simulation predictions, the transient and subtransient reactances are calculated for all 3 phase current traces and the results are averaged to obtain the final values for comparison. The process of calculating the reactance values from the short-circuit phase current traces is typically fairly time consuming and definitely somewhat subjective. The author developed an automated process for calculating the reactance values in order to reduce the time required to calculate the values based upon the short-circuit phase current trace data. The automated process was set-up and performed with the software program Mathcad. Figure 12 shows the phase current trace data from the short-circuit simulation. Figure 12. Short-Circuit Current Simulation Data Conclusions The open-circuit saturation curve predicted from the magnetostatic simulation correlates extremely well with the open-circuit saturation curve developed from the generator Factory Acceptance Tests. The predicted field current required to produce rated open-circuit voltage was within 0.5% of the actual tested field current requirement. The model does an excellent job of predicting the saturation characteristics of the machine and this capability has proven to be extremely useful. The heating in the field coil winding is proportional to the square of the current flowing in the winding, and the ability to accurately predict the current requirements has a big impact on the ability to predict the heat generation in the field coil windings, among other things. Our in-house spreadsheet design programs generally do a good job of predicting the linear behavior of the saturation curve (i.e. the air-gap line), but they tend to struggle with the actual saturation characteristics as well as the effects of the air vents in the stator stack. The excellent correlation of the FE model saturation curve essentially validates the magnetic material properties used for the analyses. The magnetostatic model and transient circuit-coupled model both do a good job of predicting the voltage signal harmonics for the generator. In this case, the predictions from the magnetostatic model were the most accurate. The peak individual harmonic prediction from the magnetostatic model was within 5.3% of the measured peak individual harmonic from the generator Factory Acceptance Tests. The Total Harmonic Distortion prediction from the magnetostatic model was within 0.3% of the measured Total Harmonic Distortion. The R&D in-house spreadsheet design program also does a reasonably good job of predicting the voltage signal harmonics. The spreadsheet predictions were within 17.6% and 6.8% for the peak individual harmonic and Total Harmonic Distortion, respectively. Note that the simulations show a higher harmonic distortion content near the 30th harmonic than what is found in the test data. For this generator design, the slot passing frequency for the rotor is 1.8 kHz. The 30th harmonic has a frequency of 1.8 kHz. The simulation voltage signal has a 1.8 kHz ripple due to the rotor passing the stator slots. This is typically reduced in reality by using a slot skew on the stator stack. This particular design has a 1 slot skew and the skew results in lesser measured distortion near the 30th harmonic. The transient circuit-coupled simulation provides a powerful tool for predicting the transient and subtransient reactances of the generator. The subtransient reactance prediction was within 5.5% of the measured value from the generator Factory Acceptance Tests. The transient reactance prediction was within 10.7% of the measured value. The reactance calculations themselves are a bit nebulous due to the nature of how the calculations are carried out. Typically, Kato Engineering guarantees the measured reactance values within +/-20% of the predicted reactance values. The importance of the ability to predict the reactance values can be brought to light by considering the history of this particular generator design. The guaranteed subtransient reactance for this generator design was 9.3% to 12.6% (+/-15% of the standard spreadsheet design program prediction). This particular customer specification had a slightly narrower tolerance band for the allowable subtransient reactance (i.e. +/-15%). The measured subtransient reactance was 9.1% and we had to request a specification deviation from the customer in order to deliver the generator. Had we been able to use the Finite Element simulation tools presented herein for predicting the subtransient reactance we would have put forth a guaranteed range of 7.3% to 9.9%, and the measured subtransient reactance would have been well within the limits of our customer driven specification. References 1. John H. Kuhlmann, “Design of Electrical Apparatus”, 3rd ed., John Wiley and Sons, New York, 1950. 2. James W. Nillson, “Electric Circuits”, 4th ed., Addison-Wesley Publishing Company, 1993.