Residual flux-based a posteriori error estimates for finite
advertisement

Numerische Mathematik manuscript No.
(will be inserted by the editor)
Martin Vohralı́k
Residual flux-based a posteriori error
estimates for finite volume and related locally
conservative methods
Received: date / Revised: date
Abstract We derive in this paper a posteriori error estimates for discretizations
of convection–diffusion–reaction equations in two or three space dimensions. Our
estimates are valid for any cell-centered finite volume scheme, and, in a larger
sense, for any locally conservative method such as the mimetic finite difference,
covolume, and other. We consider meshes consisting of simplices or rectangular
parallelepipeds and also provide extensions to nonconvex cells and nonmatching
interfaces. We allow for the cases of inhomogeneous and anisotropic diffusion–
dispersion tensors and of convection dominance. The estimates are established in
the energy (semi)norm for a locally postprocessed approximate solution preserving the conservative fluxes and are of residual type. They are fully computable
(all occurring constants are evaluated explicitly) and locally efficient (give a local
lower bound on the error times an efficiency constant), so that they can serve both
as indicators for adaptive refinement and for the actual control of the error. They
are semi-robust in the sense that the local efficiency constant only depends on local variations in the coefficients and becomes optimal as the local Péclet number
gets sufficiently small. Numerical experiments confirm their accuracy.
Keywords a posteriori error estimates · convection–diffusion–reaction equation ·
inhomogeneous and anisotropic diffusion · convection dominance · locally
conservative methods · finite volume method · mimetic finite difference method ·
covolume method · nonmatching grids
Mathematics Subject Classification (2000) 65N15, 76M12, 76S05
This work was supported by the GdR MoMaS project “Numerical Simulations and Mathematical
Modeling of Underground Nuclear Waste Disposal”, PACEN/CNRS, ANDRA, BRGM, CEA,
EdF, IRSN, France.
The main part of this work was carried out during the author’s post-doc stay at Laboratoire de
Mathématiques, Analyse Numérique et EDP, Université de Paris-Sud and CNRS, Orsay, France
M. Vohralı́k
Laboratoire Jacques-Louis Lions, Université Pierre et Marie Curie (Paris 6), B.C. 187, 4 place
Jussieu, 75252 Paris, France.
Tel.: +33-1-44 27 72 01
Fax: +33-1-44 27 72 00
E-mail: vohralik@ann.jussieu.fr
2
Martin Vohralı́k
1 Introduction
We consider in this paper the convection–diffusion–reaction problem
− ∇ · (S∇p) + ∇ · (pw) + rp = f
p=g
−S∇p · n = u
in Ω ,
on ΓD ,
on ΓN ,
(1.1a)
(1.1b)
(1.1c)
where S is a diffusion–dispersion tensor (which can be inhomogeneous and anisotropic), w is a possibly dominating velocity field, r is a reaction function, f is
a source term, and g and u prescribe the Dirichlet and Neumann boundary conditions, respectively. We suppose that Ω ⊂ Rd , d = 2, 3, is a polygonal (meaning
alternatively also polyhedral) domain (open, bounded, and connected set), that
ΓD ∩ ΓN = 0,
/ ΓD ∪ ΓN = Γ := ∂ Ω , that |ΓD | =
6 0, where |ΓD | is the measure of the
set ΓD , and that Γin := {x ∈ ∂ Ω ; w · n < 0} ⊂ ΓD . Finally, n stands for the unit
normal vector of ∂ Ω , outward to Ω . Our purpose is to derive a posteriori error
estimates for finite volume, and, in a larger sense, any locally conservative discretizations of the problem (1.1a)–(1.1c).
Residual a posteriori error estimates are nowadays well established for discretizations of the pure diffusion form of (1.1a)–(1.1c) (i.e., w = r = 0) by the
finite element method, cf. for example the survey by Verfürth [46]. In most cases,
however, the analysis is only given for S being an identity matrix; an in-depth
analysis for the general inhomogeneous (and anisotropic) diffusion tensor was presented by Bernardi and Verfürth [14]. In recent years a posteriori error estimates
have been extended to convection–diffusion problems as well. We cite in particular Verfürth [47], who derived estimates in the energy norm for the conforming
Galerkin method and its stabilized SUPG version. His estimates are both reliable
and locally efficient and, moreover, the efficiency constant becomes optimal as
the local Péclet number gets sufficiently small. Similar results have been obtained
in the framework of nonconforming finite element methods by Ainsworth [7] for
the inhomogeneous pure diffusion case and by El Alaoui et al. in [26] for the
convection–diffusion case. Recently, Verfürth [48] improved his results while giving estimates which are fully robust with respect to convection dominance in a
norm incorporating a dual seminorm of the convective derivative. The new norm
is, however, not computable, there is no local lower bound, and the estimators do
not change with respect to [47] and hence the adaptive strategies will remain the
same.
The theory of a posteriori error estimation is much less developed for finite
volume methods. For vertex-centered schemes, the analogy with the finite element case is usually exploited in order to obtain a posteriori error estimates—this
is, e.g., the case of the works of Afif et al. [4], Bergam et al. [13] or Lazarov
and Tomov [36] (cf. also [18]). Still less work has been done for cell-centered
schemes. Agouzal and Oudin [6] simply note that one can exploit the relations
between the lowest-order Raviart–Thomas mixed finite element, the lowest-order
nonconforming finite element, and the cell-centered finite volume methods on triangular meshes in order to obtain an error indicator under a saturation-like hypothesis. Rigorous a posteriori error estimates are obtained by Achdou et al. [2],
however, only for two particular schemes. Equivalence of the discrete forms of the
schemes with some finite element ones is used for this purpose. Nicaise [37,38]
Residual flux-based a posteriori error estimates for finite volumes
3
gives a posteriori estimates for Morley-type interpolants of the original piecewise
constant finite volume approximation. Finally, yet a different approach, yielding
an estimate in the L1 -norm, independent of the size of the diffusion tensor, is
given by Ohlberger [39,40], whereas one of the first results on a posteriori error estimation in finite volume methods were obtained by Angermann [8] and
Angermann et al. [9]. In the two years refereeing period of this paper, a few new
references appeared. Kim [35] presents estimates applicable to any locally conservative method, as we do it here. Both approximation to −S∇p (which we shall
term here as “velocity”) and to p (which we shall term here as “potential”) have to
be specified first. Then bounds up to an undetermined constant are given for this
couple in a mesh-dependent norm, which contains a weighted jump term for the
potential. Beirão da Veiga [45] gives a posteriori error estimates for the mimetic
finite difference method, more precisely for the known velocity and a piecewise
linear postprocessing of the originally piecewise constant potential. Again a meshdependent norm is used and the estimator features an unknown generic constant.
The purpose of this paper is to develop a sufficiently general and unified
framework for a posteriori error estimation in the finite volume method, and, in
a larger sense, in any locally conservative method. The derived estimates are first
of all independent of particular schemes. Any cell-centered finite volume scheme,
cf. Eymard et al. [28], the schemes proposed in [22,30,31,33], “multi-point fluxapproximation” schemes [1,25], “discrete duality finite volume” schemes [23],
and “mixed finite volume” schemes [24] can be considered. Similarly, the estimates are valid for the mimetic finite difference, cf. [16], covolume, cf. [21],
and other locally conservative methods. The only requirement we have is that the
scheme satisfies a conservation equation over each computational cell, and prescribes in particular the discrete fluxes. We focus here on bounds for the error
measured in the natural energy (semi)norm for the (postprocessed) potential only
and our estimates hold and have the same form from pure diffusion cases to the
full convection–diffusion–reaction ones. As an important point, we derive them
for very general meshes containing nonconvex cells and nonmatching interfaces.
For the sake of completeness of the analysis, we also consider general inhomogeneous Dirichlet or Neumann boundary conditions. The derived estimators are associated with the mesh cells, are locally and easily computable, and they are also
fully computable in the sense that all occurring constants are evaluated explicitly.
This in particular means that they can serve not only as indicators for adaptive
refinement, which is the usual practice, but also for the actual control of the error.
In the developed independent theory, no equivalence with a different (finite element or mixed finite element) case is necessary. Also, no convexity of the domain,
no additional regularity of the weak solution, and no saturation assumption are
needed.
The basis of our approach is to exploit the particular feature of the considered
schemes, which is the conservativity of the discrete fluxes across the sides (edges if
d = 2, faces if d = 3) of the mesh. Inspired by the results of Eymard et al. [29] and
of the author [52], we first build a postprocessed approximate potential p̃h which
preserves exactly the given discrete diffusive fluxes and whose mean or point value
is in each cell fixed by the original constant approximation. The interest of such
a postprocessing is twofold. First of all, we obtain an approximate potential suitable for energy error measuring (recall that the piecewise gradient of the original
4
Martin Vohralı́k
cellwise constant approximation is zero, so that it gives no sense to measure the
energy error in it). Secondly, by such a construction, −S∇ p̃h lies in the H(div, Ω )
space. In the finite volume case, moreover, using the fixation of p̃h by the original
cell values, we are able to prove the convergence of p̃h and to give a priori error
estimates, under the condition that the original scheme satisfies some necessary
properties. The construction of the postprocessed potential is particularly easy
for simplices (triangles if d = 2 and tetrahedra if d = 3) or, when S is diagonal,
for rectangular parallelepipeds (rectangles if d = 2, rectangular parallelepipeds if
d = 3); in this case p̃h is a second-order polynomial whose gradient (times minus S) is constructed as in the lowest-order Raviart–Thomas mixed finite element
method, cf. [15,43]. The crucial advantage −S∇ p̃h ∈ H(div, Ω ) is, however, compensated by the fact that p̃h is nonconforming in the sense that p̃h 6∈ H 1 (Ω ). We
describe all the above results in detail in Section 3, after collecting some preliminary remarks, notation, assumptions, and details on the continuous problem in
Section 2. In this section, we also recall the Oswald interpolation operator and
describe its generalization to arbitrary grids and boundary conditions.
Section 4 is then devoted to our a posteriori error estimates. They consist of
several independent estimators, the principal of which penalize the fact that p̃h is
nonconforming and that its residual is nonzero. For pure diffusion problems, only
these estimators (plus possibly still a Neumann boundary one) are present. When
there is some convection, additional convection and upwinding estimators appear,
and for cases with reaction, a reaction quadrature estimator may be present as
well. We next prove that the principal (nonconformity, convection, and residual)
estimators represent local lower bounds for the error as well,
where in particular
the efficiency constants are of the form c1 + c2 min Pe, ρ , where Pe (the local
Péclet number) and ρ are given below by (4.12) and where c1 , c2 only depend
on local variations in S (i.e., on local inhomogeneities and anisotropies), on local variations in w and r, on the space dimension, on the polynomial degree of
p̃h , f , w, r, and on the shape-regularity parameter of the mesh. These estimators
are thus in particular optimally efficient as the local Péclet number gets sufficiently
small. We are not able to obtain similar results for the upwinding estimator but numerical experiments suggest that this estimator represents a higher-order term as
soon as the local Péclet number gets sufficiently small. We also remark that in
a norm incorporating a dual seminorm of the convective derivative and a certain
mesh-dependent seminorm of the jumps, these results would become robust with
respect to the convection dominance as in Verfürth [48], following the approach
given in [27]. A more detailed discussion, as well as several other remarks, is
given in Section 4.3.
We finally in Section 5 discuss a particular approach to meshes consisting of
arbitrary polygons (we use this notation also for polyhedrons) which may be nonmatching and consist of elements which are not necessarily convex. It consists in
subdividing each mesh element into a simplicial submesh and then directly using
the theory established previously. Finally, we illustrate the accuracy of the derived estimates in Section 6 on several numerical experiments and conclude by
some technical lemmas in Section 7. This paper is a detailed description, completion, and extension of the results previously announced in [51] and [54]. Robust a
posteriori error estimates for vertex-centered-like finite volume methods are then
presented in [53] and [19]. Finally, for a complementary approach to a posteriori error estimation in locally conservative methods, evaluating the error in the
velocity only (and alternatively in the velocity and the potential), we refer to [55].
Residual flux-based a posteriori error estimates for finite volumes
5
2 Preliminaries
We introduce here the notation, define admissible partitions of the domain Ω , recall some inequalities which will be important in the sequel, state the assumptions
on the data, give details on the continuous problem (1.1a)–(1.1c), and finally recall
and give some extensions on the Oswald interpolation operator. In what follows,
we conceptually denote by CA , cA constants basically dependent on a quantity A
but always independent of the discretization parameter h.
2.1 Function spaces
For a domain S ⊂ Rd , we denote by Ll (S) and Ll (S) = [Ll (S)]d the Lebesgue
spaces, by (·, ·)S the L2 (S) or L2 (S) inner product, and by k · kS the associated
norm. We mean by |S| the Lebesgue measure of S, by |σ | the (d − 1)-dimensional
Lebesgue measure of σ ⊂ Rd−1 , and in particular by |s| the length of a segment
s. At the same time, |A| is the cardinality of a set A. Next, H l (S) is the Sobolev
space of functions with square-integrable weak derivatives up to order l; HD1 (S)
is a subspace of H 1 (S) of functions with traces vanishing on ΓD and H 1/2 (ΓD )
is the trace space on ΓD . Next, H(div, S) is the space of functions with squareintegrable weak divergences, H(div, S) = {v ∈ L2 (S); ∇ · v ∈ L2 (S)}, and h·, ·i∂ S
stands for (d − 1)-dimensional inner product on ∂ S. Finally, for a partition Th of
Ω as defined below, we will use the “broken Sobolev space” H l (Th ), H l (Th ) :=
{ϕ ∈ L2 (Ω ); ϕ |K ∈ H l (K) ∀K ∈ Th }. We refer to Adams [3] for more details.
2.2 Partitions of the domain
We
S consider in this paper partitions Th of Ω into closed polygons such that Ω =
K∈Th K and such that the intersections of their interiors are pairwise empty. For
K ∈ Th , we denote by EK the set of such subsets σ of ∂ K that there exists L ∈
Th , L 6= K, such that σ = σK,L := ∂ K ∩ ∂ L has a positive (d − 1)-dimensional
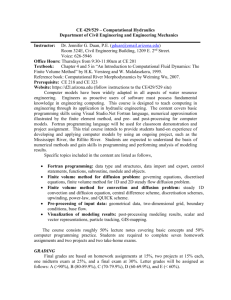
Lebesgue measure. We call σ a side and K and L neighbors. We note that for
matching meshes (containing no hanging nodes) consisting of convex elements,
σ are simply the sides in the geometrical sense, which is not necessarily the case
on general polygonal meshes, see Figure 2.1. The set EK is completed by the
(geometrical) sides of K lying at the boundary; we suppose in this case that each
σ lies entirely either in ΓD or in ΓN . We next denote by Eh the set of all, by Ehint the
set of interior, and by Ehext the set of exterior sides of Th . Also, let EhN stand for the
sides contained in ΓN , EhD for those contained in ΓD , EK for σ ∈ Ehint which share
at least a vertex with K ∈ Th , and TK for all elements sharing at least a vertex with
K ∈ Th . A family of meshes {Th }h is parameterized by h := maxK∈Th hK , where
hK stands for the diameter of K; we also denote by hσ the diameter of σ ∈ Eh .
For matching meshes consisting of simplices or rectangular parallelepipeds,
we will in some parts of the paper need the following assumption (κK := |K|/hdK ):
Assumption (A) (Shape regularity of matching meshes consisting of simplices or
rectangular parallelepipeds)
There exists a constant κT > 0 such that minK∈Th κK ≥ κT for all h > 0.
6
Martin Vohralı́k
σK,L
K
σK,M
M
L
Th
TcM
Ω
Fig. 2.1 Considered meshes and notation
Let ρK denote the diameter of the largest ball inscribed in K. Then Assumption (A) is equivalent to the usual requirement of the existence of a constant
θT > 0 such that maxK∈Th hK /ρK ≤ θT for all h > 0.
In the general case, we make the following shape regularity assumption:
Assumption (B) (Shape regularity of arbitrary polygonal meshes)
(B1) There exists a constant κT > 0 such that minK∈Th κK ≥ κT for all h > 0;
(B2) there exists a constant ξT > 0 such that maxK∈Th |EK | ≤ ξT for all h > 0;
ch of Th which consist of simplices or rect(B3) there exist matching refinements T
angular parallelepipeds and satisfy Assumption (A).
By Assumption (B), the elements of Th are not “flat”, the number of their sides
ch . In the sequel, as for the
is limited, and each Th admits a matching refinement T
int
ext
b K , and T
b K also for Tc
mesh Th , we will use the notation Ebh , Ebh , EbK , E
h . We also
c
c
denote by TK the partition of K ∈ Th by the elements of Th .
2.3 Poincaré, Friedrichs, and trace inequalities
Let K be a convex polygon, σ its (geometrical) side, and ϕ ∈ H 1 (K). Three inequalities will play an essential role in the derivation of our a posteriori error
estimates.
First, the Poincaré inequality states that
kϕ − ϕK k2K ≤ CP,K h2K k∇ϕ k2K ,
(2.1)
where ϕK is the mean of ϕ over K given by ϕK := (ϕ , 1)K /|K| and where the
constant CP,K can for each convex K be evaluated as 1/π 2 , cf. [41,12].
Second, the generalized Friedrichs inequality states that
kϕ − ϕσ k2K ≤ CF,K,σ h2K k∇ϕ k2K ,
(2.2)
where ϕσ is the mean of ϕ over σ ∈ EK given by ϕσ := hϕ , 1iσ /|σ |. It follows
from [49, Lemma 4.1] that CF,K,σ = 3d for a simplex K and its side σ . For a
Residual flux-based a posteriori error estimates for finite volumes
7
general convex K, CF,K,σ can be evaluated from the proof of [28, Lemma 9.4]
and [29, Lemma 3] in the form Chd−1
K /|σ | with C only depending on d and κK .
Finally, the trace inequality states that
kϕ − ϕσ k2σ ≤ Ct,K,σ hK k∇ϕ k2K ,
kϕ − ϕK k2σ ≤ Cet,K,σ hK k∇ϕ k2K ,
(2.3a)
(2.3b)
cf. the proof of [28, Lemma 9.4] and [29, Lemma 1]. It has in particular been
shown in [37, Lemma 3.5] that Ct,K,σ = Ct,d hK /hσ for a simplex, where Ct,d ≈
1.55416 if d = 2 and Ct,d ≈ 11.53557 if d = 3. Similarly, it follows from the proof
of [49, Lemma 4.1] that Cet,K,σ = 3dhK |σ |/|K| for a simplex. Finally, Cet,K,σ only
depends on d and κK for a general convex K and its side σ .
The above inequalities are also valid for nonconvex polygons K or when σ is
only a general part of ∂ K such that |σ | > 0, cf. [28, Lemma 10.4]. The dependencies on K and σ are in this case, however, more complicated in general.
2.4 Assumptions on the data
fh of Ω such that the data of the
We suppose that there exists a basic partition T
fh in the following way:
problem (1.1a)–(1.1c) are related to T
Assumption (C) (Data)
(C1) S (SK := S|K ) is a piecewise constant, symmetric, bounded, and uniformly
positive definite tensor such that cS,K v · v ≤ SK v · v ≤ CS,K v · v, cS,K > 0,
CS,K > 0, for all v ∈ Rd and all K ∈ Tf
h;
(C2) w ∈ H(div, Ω ) and each component of w is a polynomial of degree at most
fh ;
fh such that w|K ≤ Cw,K , Cw,K ≥ 0, for all K ∈ T
k on each K ∈ T
f
(C3) r is a polynomial of degree at most k on each
K ∈ Th ;
1
(C4) 2 ∇ · w|K + r|K ≥ cw,r,K and ∇ · w|K + r|K ≤ Cw,r,K , cw,r,K ≥ 0, Cw,r,K ≥ 0,
for all K ∈ Tf
h;
(C5) f is a polynomial of degree at most k on each K ∈ Tf
h;
(C6) g ∈ H 1/2 (ΓD );
(C7) u ∈ L2 (ΓN );
(C8) if cw,r,K = 0, then Cw,r,K = 0.
The assumptions that S is piecewise constant and that w, r, and f are piecewise
polynomial are made only for the sake of simplicity and are usually satisfied in
practice. They are in fact only needed for the local efficiency proofs of our a
posteriori error estimates. If the functions at hand do not fulfill these requirements,
interpolation can be used. Also, note that Assumption (C8) allows cw,r,K = 0 but
w|K 6= 0.
8
Martin Vohralı́k
2.5 Continuous problem
fh . We define a bilinear
Let Th be, as throughout the whole paper, a refinement of T
form B by
p, ϕ ∈ H 1 (Th )
B(p, ϕ ) := ∑ (S∇p, ∇ϕ )K + (∇ · (pw), ϕ )K + (rp, ϕ )K
K∈Th
and the corresponding energy (semi)norm by
|||ϕ |||2Ω :=
∑
K∈Th
|||ϕ |||2K ,
(2.4)
|||ϕ |||2K := kS1/2 ∇ϕ k2K + 1/2 2
1
ϕ K
2∇·w+r
ϕ ∈ H 1 (Th ).
In this way B(·, ·) and ||| · |||Ω are well-defined for p, ϕ ∈ H 1 (Ω ) as well as for
p, ϕ that are only piecewise regular. We remark that ||| · |||Ω is always a norm on
HD1 (Ω ), whereas it is a norm on H 1 (Th ) only when cw,r,K > 0 for all K ∈ Th .
The weak formulation of the problem (1.1a)–(1.1c) is then to find p ∈ H 1 (Ω )
with p|ΓD = g in the sense of traces such that
B(p, ϕ ) = ( f , ϕ )Ω − hu, ϕ iΓN
∀ϕ ∈ HD1 (Ω ).
(2.5)
Assumptions (C1)–(C7), the Green theorem, and the Cauchy–Schwarz inequality
imply that
B(ϕ , ϕ ) ≥ |||ϕ |||2Ω
B(ϕ , ϕ ) =
|||ϕ |||2Ω
+
1
2
∀ϕ ∈ HD1 (Ω ),
∑
K∈Th
hϕ , w · ni∂ K
2
(2.6)
∀ϕ ∈ H (Th ),
1
Cw,r,K
|||p|||Ω |||ϕ |||Ω
B(p, ϕ ) ≤ max 1, max
K∈Th cw,r,K
Cw,K
+ max √
∀p, ϕ ∈ H 1 (Th )
|||p|||Ω kϕ kΩ
cS,K
K∈Th
(2.7)
(2.8)
and problem (2.5) under Assumption (C) in particular admits a unique solution.
Remark 2.1 (Notation) In estimate (2.8), if cw,r,K = 0, then the term Cw,r,K /cw,r,K
should be evaluated as zero; since Assumption (C8) for this case gives Cw,r,K = 0,
the term with Cw,r,K in fact does not even enter the estimate. To simplify notation,
we will systematically use the convention 0/0 = 0 throughout the text.
Remark 2.2 (Different partitions) We clarify here the relations between the diffh is only used so as
ferent partitions of Ω considered. First of all, the partition T
to describe the different parts of Ω with different data (materials). Next, Th is the
fh . Finally,
“computational” partition and we suppose that Th is a refinement of T
for general (nonmatching) polygonal meshes, we shall sometimes need a matching
refinement Tc
h of Th consisting of simplices or rectangular parallelepipeds.
Residual flux-based a posteriori error estimates for finite volumes
9
2.6 Oswald interpolation operator
The Oswald operator, previously considered, e.g., in [2,34] and studied in detail
in [34,17], associates to a discontinuous piecewise polynomial function p̃h its
conforming (continuous, contained in H 1 (Ω )) interpolant. We briefly recall it here
and present its extension to arbitrary grids and boundary conditions.
Let Th be matching, consisting of simplices or rectangular parallelepipeds,
and satisfying Assumption (A). If Th consists of simplices, let Rl (Th ) := Pl (Th )
denote the space of polynomials of total degree at most l on each simplex (without
any continuity requirement at the sides). Similarly, if Th consists of rectangular
parallelepipeds, let Rl (Th ) := Ql (Th ) denote the space of piecewise polynomials
of degree at most l in each variable. The Oswald interpolation operator IOs :
Rl (Th ) → Rl (Th ) ∩ H 1 (Ω ) is defined as follows: given a function ϕh ∈ Rl (Th ),
the value of IOs (ϕh ) is prescribed at the Gauss–Lobatto nodes on rectangular
parallelepipeds and suitable (e.g., Lagrangian on triangles when l = 2) nodes on
simplices, see [17, Sections 3 and 5] of Rl (Th ) ∩ H 1 (Ω ) by the average of the
values of ϕh at this node, IOs (ϕh )(V ) = ∑K∈TV ϕh |K (V )/|TV |, where TV is the
set of such K ∈ Th that contain the node V . Note that the interpolant is in particular
equal to ϕh |K (V ) at a node V lying in the interior of some K ∈ Th . Let [[ϕh ]] be the
jump of a function ϕh across a side σ : if σ = ∂ K ∩ ∂ L, then [[ϕh ]] is the difference
of the value of ϕh in K and L (the order of K and L has no influence on what
follows) and [[ϕh ]] := 0 otherwise. The following result has been proved in [17],
see Lemmas 3.2 and 5.3 and Remark 3.2 in this reference:
Lemma 2.1 (Oswald interpolation operator) Let Th be matching, consisting of
simplices or rectangular parallelepipeds, and satisfying Assumption (A). Let next
ϕh ∈ Rl (Th ) and let IOs (ϕh ) be constructed as described above. Then
kϕh − IOs (ϕh )k2K ≤ C1
k∇(ϕh − IOs (ϕh ))k2K
≤ C2
∑
hσ k[[ϕh ]]k2σ ,
∑
2
h−1
σ k[[ϕh ]]kσ
σ ∈EK
σ ∈EK
for all K ∈ Th , where the constants C1 , C2 only depend on the space dimension d,
on the maximal polynomial degree l, and on the shape regularity parameter κT .
If Th is nonmatching or consists of arbitrary polygons, let Tc
h be its conformch ).
ing submesh of Assumption (B3). Then each p̃h ∈ Rl (Th ) also belongs to Rl (T
ch as in the previous paragraph. We finally deHence we can define IOs ( p̃h ) on T
Γ ( p̃ ) ∈ H 1 (Ω ), differing from I ( p̃ ) only on such K ∈ T that contain
fine IOs
Os h
h
h
a boundary side, by
Γ
IOs
( p̃h )|ΓD = g
Γ
hIOs
( p̃h )w · n, 1iσ
in the sense of traces,
= WK,σ
∀σ
∈ EhN .
(2.9a)
(2.9b)
Here WK,σ are the given scheme convective fluxes, cf. Sections 3 and 4 below. In
particular, for the finite volume scheme (3.1)–(3.12) below, if w · n is constant but
Γ ( p̃ ) on
nonzero on a given σ ∈ EhN , then (2.9b) prescribes the mean value of IOs
h
this side by WK,σ /hw · n, 1iσ , i.e., by pσ .
10
Martin Vohralı́k
3 Cell-centered finite volume schemes and postprocessing
This section is devoted to the example of the cell-centered finite volume method
for the problem (1.1a)–(1.1c). We also demonstrate here the construction of the
locally postprocessed approximation p̃h which will serve later as the basis for our
a posteriori error estimates.
3.1 The cell-centered finite volume method
A general cell-centered finite volume scheme for the problem (1.1a)–(1.1c) can be
written in the following form: find pK , K ∈ Th , the approximations to p such that
∑
σ ∈EK
SK,σ +
∑
σ ∈EK
WK,σ + rK pK |K| = fK |K|
∀K ∈ Th ,
(3.1)
where fK := ( f , 1)/|K|, rK := (r, 1)/|K|, and where SK,σ and WK,σ are, respectively, the diffusive and convective fluxes through the sides σ of an element K,
functions of pK , K ∈ Th , of the mesh, and of the data. For the a posteriori error
estimates presented in this paper, we do not need the specific form of the diffusive
and convective fluxes; our analysis, however, relies on the finite volume concept
of their continuity, imposing that SK,σK,L = −SL,σK,L and WK,σK,L = −WL,σK,L for
all σK,L ∈ Ehint . Note also that for nonmatching grids, σ is not necessarily a side
of K in the geometrical sense, see Section 2.2. To fix ideas, we give an example.
When Th is admissible in the sense of [28, Definition 9.1], which is satisfied,
e.g., when Th is matching, consists of convex elements, and when there exist
points xK in the interior of each K ∈ Th such that the straight lines connecting xK
and xL for two neighboring elements K and L are orthogonal to σK,L = ∂ K ∩ ∂ L
and finally when an analogous orthogonality condition holds on the Dirichlet part
of the boundary, and under the additional assumption that SK = sK Id for all K ∈
Th , the following choices for SK,σ and WK,σ are possible:
|σK,L |
(pL − pK )
σ = σK,L ∈ Ehint ,
dK,L
|σ |
= −sK
(gσ − pK )
σ ∈ EK ∩ EhD ,
dK,σ
SK,σ = −sK,L
(3.2)
SK,σ
(3.3)
SK,σ = uσ |σ |
WK,σ = pσ wK,σ
σ ∈ EK ∩ EhN ,
σ ∈ EK .
(3.4)
(3.5)
Here dK,L = |xK − xL |, the Euclidean distance of xK and xL , dK,σ is the Euclidean
distance of xK and σ ∈ EK ∩ EhD , and
gσ :=
hg, 1iσ
,
|σ |
uσ :=
hu, 1iσ
,
|σ |
wK,σ := hw · n, 1iσ
(3.6)
are, respectively, the mean value of the Dirichlet boundary condition g on a side
σ ∈ EhD , the mean value of the Neumann boundary condition u on a side σ ∈ EhN ,
and the flux of the velocity field w through a side σ of K. For the value sK,L ,
Residual flux-based a posteriori error estimates for finite volumes
11
we have two choices, corresponding respectively to the arithmetic and harmonic
averaging in the diffusion–dispersion tensor,
sK + sL
,
2
2sK sL
:=
.
sK + sL
sK,L :=
(3.7a)
sK,L
(3.7b)
Finally, pσ is the weighted upwind value, given for interior or Dirichlet boundary
sides by
pσ := νσ p̂σ + (1 − νσ )pσ ,
(3.8)
where p̂σ is the upwind value and pσ the centered value, given respectively by
pK if wK,σ ≥ 0
(3.9)
p̂σ :=
, pσ := 12 (pK + pL )
pL if wK,σ < 0
if σ is an interior side between elements K and L and
pK if wK,σ ≥ 0
p̂σ :=
pσ := 12 (pK + gσ )
gσ if wK,σ < 0
(3.10)
if σ ∈ EK is a Dirichlet boundary side. Finally,
pσ := pK
(3.11)
if σ ∈ EK is a Neumann boundary side. In the above definitions, νσ ∈ [0, 1] is a
coefficient of the amount of upstream weighting. The full-upwind scheme (with
νσ = 1 for all σ ∈ Eh ) is classical, see [28, Section 9]. The introduction of the
parameter νσ is done in order to guarantee the stability of the scheme while simultaneously reducing the excessive numerical diffusion added by the full upstream
weighting. An optimal choice for νσ (cf. [20,32]) is (for wK,σ 6= 0, otherwise
νσ := 1)
2sK,L |σK,L |
1
−
min
,
1
if σK,L ∈ Ehint ,
d
|w
|
K,L
K,
σ
2sK |σ |
νσ :=
(3.12)
1
−
min
,
1
if σ ∈ EhD and wK,σ > 0,
d
|w
|
K,
σ
K,
σ
1
if σ ∈ EhD and wK,σ < 0.
Remark 3.1 (Local Péclet upstream weighting) The local Péclet upstream weighting (3.8)–(3.12) for the scheme (3.1)–(3.7b) on polygonal meshes Th admissible
in the sense of [28, Definition 9.1] guarantees, when SK = sK Id for all K ∈ Th ,
ΓN = 0,
/ and under appropriate assumptions on w, r, and f , the discrete maximum
principle, while reducing the excessive numerical diffusion added by the full upstream weighting, cf. [32, Theorem 4.5] and [28, Proposition 9.2]. Moreover, the
inequality
(3.13)
∑ ∑ pσ wK,σ pK ≥ 12 ∑ p2K (∇ · w, 1)K
K∈Th σ ∈EK
K∈Th
holds, see [52, Lemma 6.5]. Another possibility for still more precise discretization of the convection term would be to define the centered value pσ by the value
12
Martin Vohralı́k
that takes a linear function given by pK in xK and by pL in xL on σK,L ∈ Ehint common to K, L ∈ Th , i.e., to take into account the distances of xK and xL from the side
σK,L instead of putting pσ := (pK + pL )/2, and similarly at the boundary. While
under appropriate modification of (3.12) and under the above-mentioned assumptions, the discrete maximum principle would still hold, this would not in general
be the case for the inequality (3.13). This inequality is, however, very useful already while proving the existence and uniqueness of the discrete solution when
there is no discrete maximum principle (recall that this principle can in general
only be satisfied if S is not anisotropic and under some conditions on the mesh),
cf. [32, Theorems 4.3 and 4.4] and [28, Lemma 9.2].
Remark 3.2 (Inhomogeneous diffusion–dispersion tensors) Similarly as for the
convection term, instead of directly using (3.7a) or (3.7b), we may take into account the distances of xK and xL from the side σK,L ∈ Ehint common to K, L ∈ Th
for the discretization of inhomogeneous diffusion–dispersion tensors.
3.2 Postprocessing for cell-centered finite volumes
The approximate finite volume solution is only piecewise constant, given by the
value pK in each K ∈ Th . In order to derive a posteriori error estimates, we construct in this paper a postprocessed approximation which has more regularity. We
use for this purpose the additional knowledge that we have from a finite volume
scheme: the fluxes.
Developing the ideas of Eymard et al. [29] or of the author [52], the most
general postprocessed approximation p̃h ∈ H 1 (Th ) that we consider in this paper
is defined as the weak solution of the following local Neumann problems:
− ∇ · (S∇ p̃h ) =
(1 − µK )
1
SK,σ
|K| σ∑
∈EK
∀K ∈ Th ,
( p̃h , 1)K
+ µK p̃h (xK ) = pK ∀K ∈ Th ,
|K|
SK,σ
−S∇ p̃h |K · n =
∀σ ∈ EK ,
|σ |
(3.14a)
(3.14b)
∀K ∈ Th . (3.14c)
Here, µK = 0 or 1, depending on whether the particular scheme (3.1) represents
by pK the approximate mean value on K ∈ Th or the approximate point value in a
point xK (for simplicity assumed inside K) and also on the expected regularity of
p̃h . It is immediate to see that such p̃h verifies −S∇ p̃h ∈ H(div, Ω ). For general
elements, it is not clear how to practically find such p̃h ; it is, however, easy in two
particular cases treated below. We also show below that p̃h is a good approximation of the weak solution p under some conditions on the original scheme.
3.2.1 Postprocessing on simplices for general diffusion–dispersion tensors
For matching triangular or tetrahedral meshes, it is immediate to show that if S =
Id, p̃h given by (3.14a)–(3.14c) is a piecewise second-order polynomial of the
form p̃h |K = aK (x2 + y2 ) + bK x + cK y + dK if d = 2 and p̃h |K = aK (x2 + y2 + z2 ) +
Residual flux-based a posteriori error estimates for finite volumes
13
bK x + cK y + dK z + eK if d = 3. If S 6= Id, then p̃h verifying (3.14a)–(3.14c) is a
full second-order polynomial on each K ∈ Th (the symmetry of S is important in
this case). Simply, (3.14c) imposes the normal derivative of p̃h on the sides of K,
(3.14b) imposes the mean of p̃h over K or a point value in xK , and (3.14a) follows
by the Green theorem and by the fact that −∇ · (SK ∇ p̃h ) is constant. Note also
that the proposed postprocessing is local on each element and that one only has
to build a second-order polynomial on each K ∈ Th from the prescribed degrees
of freedom, so that its cost is negligible. The postprocessed approximation p̃h is,
however, in general nonconforming, not included in H 1 (Ω ) but only in H 1 (Th ).
3.2.2 Postprocessing on rectangular parallelepipeds for diagonal
diffusion–dispersion tensors
For S diagonal and matching meshes consisting of rectangles or rectangular parallelepipeds, p̃h verifying (3.14a)–(3.14c) is a piecewise second-order polynomial of the form p̃h |K = aK x2 + bK y2 + cK x + dK y + eK if d = 2 and p̃h |K =
aK x2 + bK y2 + cK z2 + dK x + eK y + fK z + gK if d = 3. Again, the postprocessing is
local and the new variable p̃h is nonconforming in the sense that it is in general
only in H 1 (Th ) (but −S∇ p̃h belongs to H(div, Ω )).
Remark 3.3 (Comparison with mixed finite elements) Similar postprocessing was
used in [52] for the lowest-order Raviart–Thomas mixed finite element method on
simplicial meshes. If ΓD = ∂ Ω and g = 0, it is proved in the above reference that in
this case, the means of p̃h on interior sides are continuous and its means on exterior
sides are equal to zero, so that we have at least some continuity of p̃h . For pure
diffusion problems (w = r = 0), it is possible to show the same result also for the
cell-centered finite volume scheme (3.1)–(3.7b), but only under the condition f =
0. It turns out that in general, p̃h ∈ H 1 (Th ) only. Note also that for pure diffusion
problems, cell-centered finite volumes and lowest-order Raviart–Thomas mixed
finite elements only differ by numerical integration, cf., e.g., Agouzal et al. [5] or
Arbogast et al. [10]. In the general case and on simplicial meshes, lowest-order
mixed finite elements are directly, without any numerical integration, equivalent
to a particular finite volume scheme, see [50] and also Younès et al. [56].
3.2.3 A priori error estimate for the postprocessed approximation
We give in this section an a priori error estimate for the finite volume postprocessed approximation p̃h given by (3.14a)–(3.14c).
fh be given
Theorem 3.1 (A priori error estimate for p̃h ) Let a basic partition T
and let its refinement Th be matching, consisting of convex elements, and satisfying Assumptions (B1)–(B2). Let p, the weak solution of the problem (1.1a)–(1.1c)
fh ) and −S∇p ∈ H(div, Ω ). Next, let the finite
given by (2.5), be such that p ∈ H 2 (T
volume scheme (3.1) be such that
!2
∑
K∈Th
hK
∑
σ ∈EK
k(SK,σ + hS∇p · n, 1iσ )|σ |−1 kσ
∑
K∈Th
≤ Ch2 ,
kp − pK k2K ≤ Ch2 ,
14
Martin Vohralı́k
where the constant C > 0 only depends on p, d, κT , ξT , the data, and Ω . Finally,
let p̃h be the postprocessed solution given by (3.14a)–(3.14c). Then
∑
K∈Th
k∇(p − p̃h )k2K ≤ Ch2 ,
kp − p̃h k2Ω ≤ Ch2 ,
where the constant C > 0 only depends on p, d, κT , ξT , the data, and Ω .
Proof We first study the estimate on the gradient, following the proof of [29, Theorem 2]. We have, for each K ∈ Th ,
cS,K k∇(p − p̃h )k2K ≤ (S∇(p − p̃h ), ∇(p − p̃h ))K
= −(∇ · (S∇p), (p − p̃h ))K + hS∇(p − p̃h ) · n, (p − p̃h )i∂ K
1/2
≤ k∇ · (S∇p)kK CP,K hK k∇(p − p̃h )kK
+
∑
σ ∈EK
1/2 1/2
Cet,K,σ hK kS∇(p − p̃h ) · nkσ k∇(p − p̃h )kK ,
using Assumption (C1), the Green theorem, the fact that k∇(p − p̃h )kK does not
depend on shifting p̃h by a constant and fixing temporarily ( p̃h , 1)K by (p, 1)K instead of (3.14b), which makes the term (∇·(S∇ p̃h ), (p− p̃h ))K disappear by virtue
of (3.14a), and finally using the Schwarz inequality, the Poincaré inequality (2.1),
and the trace inequality (2.3b). Thus
1/2
∑
1/2
cS,K k∇(p − p̃h )kK ≤ CP,K hK k∇ · (S∇p)kK + hK
σ ∈EK
Next, the triangle inequality and (3.14c) imply that
1/2
Cet,K,σ kS∇(p − p̃h ) · nkσ .
(3.15)
kS∇(p − p̃h ) · nkσ ≤ kS∇p · n − hS∇p · n, 1iσ |σ |−1 kσ
+k(hS∇p · n, 1iσ + SK,σ )|σ |−1 kσ
and we have
kS∇p · n − hS∇p · n, 1iσ |σ |−1 kσ ≤ CS,K k∇p · n − h∇p · n, 1iσ |σ |−1 kσ
1/2 1/2
≤ CS,K CK hK kpkH 2 (K)
using Assumption (C1) and [29, Lemma 2]; here the constant CK only depends on
d and κK . Thus, squaring (3.15), summing over all K ∈ Th , and using the triangle,
Cauchy–Schwarz, and the above inequalities gives
(
3
2
∑ cS,K k∇(p − p̃h )kK ≤ ∑ cS,K CP,K h2K k∇ · (S∇p)k2K
K∈Th
K∈Th
!2
1/2
2
2
2
+CS,K CK hK kpk 2
∑ Ce
H (K)
+hK
∑
σ ∈EK
σ ∈EK
1/2
Cet,K,σ k(SK,σ
t,K,σ
+ hS∇p · n, 1iσ )|σ |−1 kσ
!2 )
.
Residual flux-based a posteriori error estimates for finite volumes
15
Using the assumptions of the theorem, this concludes the proof of the bound for
the error in the gradient.
We now turn to the L2 (Ω )-estimate on p − p̃h . We have
kp − p̃h k2Ω =
∑
K∈Th
≤2
≤2
kp − p̃h k2K ≤ 2
∑
K∈Th
∑
K∈Th
∑
K∈Th
kp − pK k2K + kpK − p̃h k2K
kp − pK k2K +CP,K h2K k∇ p̃h k2K
(3.16)
kp − pK k2K + 2CP,K h2K k∇( p̃h − p)k2K + 2CP,K h2K k∇pk2K ,
using the triangle and Cauchy–Schwarz inequalities, (3.14b), and the Poincaré inequality (2.1) when µK = 0 or its continuous version when µK = 1. The assumptions of the theorem and the previously obtained bound on the gradient of p − p̃h
conclude the proof of this second estimate and thus of the whole theorem. ⊓
⊔
Remark 3.4 (Meaning of Theorem 3.1 and an example) Theorem 3.1 simply guarantees that if SK,σ from the finite volume scheme (3.1) are O(h) approximations of
the diffusive fluxes through the sides σ of all elements K ∈ Th and if the original
piecewise constant approximation given by pK in each K ∈ Th converges to p as
O(h) in the L2 (Ω )-norm, then p̃h converges to p as O(h) in the broken H 1 (Ω )norm. Let S = Id, ΓN = 0,
/ and p ∈ H 2 (Ω ). Then this is for example the case, under
some additional regularity assumptions on w, r, and g and under the assumption
that dK,L ≈ hK ≈ hL for all σK,L ∈ Ehint and dK,σ ≈ hK for all σ ∈ EhD and appropriate K, for the scheme (3.1)–(3.10) (with νσ = 1 for all σ ∈ Eh ) on polygonal
meshes Th admissible in the sense of [28, Definition 9.1], see [28, Theorem 9.4
and Remark 9.12].
3.2.4 Convergence for the postprocessed approximation
For the sake of completeness, we state here the following result, discussing the
convergence of p̃h when p ∈ H 1 (Ω ) only.
Theorem 3.2 (Convergence of p̃h ) Let w = r = 0, S = Id, ΓN = 0,
/ and g = 0.
Let Th be admissible in the sense of [28, Definition 9.1] and satisfying Assumptions (B1)–(B2) and let the finite volume scheme be given by (3.1)–(3.7b). Let
finally p be the weak solution of the problem (1.1a)–(1.1c) given by (2.5) and let
p̃h be the postprocessed solution given by (3.14a)–(3.14c). Then
∑
K∈Th
k∇(p − p̃h )k2K → 0 as
h → 0,
kp − p̃h k2Ω → 0 as
h → 0.
The convergence of the gradient of p̃h to the gradient of p was proved in [29].
The convergence of p̃h to p then follows using the estimate (3.16).
16
Martin Vohralı́k
4 A posteriori error estimates for locally conservative methods
In this section, we present our a posteriori error estimates for the discretization
of the problem (1.1a)–(1.1c) by locally conservative methods. The developments
here are completely independent of Section 3 on finite volumes; the only assumption that we make is that we are given a function p̃h , cell values pK , K ∈ Th ,
and convective fluxes WK,σ , K ∈ Th , σ ∈ EK (locally conservative, i.e., WK,σK,L =
−WL,σK,L for all σK,L ∈ Ehint ) such that
p̃h ∈ Rl (Th ),
−S∇ p̃h ∈ H(div, Ω ),
f + ∇ · (S∇ p̃h ) − rpK , 1 K −
−S∇ p̃h · n = uσ
∀σ
(4.1)
(4.2)
∑
σ ∈EK
N
∈ Eh ,
WK,σ = 0
∀K ∈ Th ,
(4.3)
(4.4)
where uσ are the mean values of the Neumann boundary condition given by (3.6).
In the finite volume case, the way to obtain p̃h satisfying (4.1), (4.2), and (4.4)
was shown in Section 3.2. The relation (4.3) then easily follows from (3.1) by the
Green theorem and by (3.14c), which gives (∇ · (S∇ p̃h ), 1)K = hS∇ p̃h · n, 1i∂ K =
− ∑σ ∈EK SK,σ . We consider general meshes Th but we are aware of the fact that
finding p̃h satisfying (4.1)–(4.4) may not be practically feasible for nonmatching
meshes or elements other than simplices or rectangular parallelepipeds. Thus an
alternative approach for general meshes is developed in Section 5 below. We first
state here the a posteriori error estimate and its local efficiency, then give several
remarks, and finally present the proofs of the estimate and of its local efficiency.
4.1 A posteriori error estimate
We state here our a posteriori error estimate. Let us first put
h2K
1
2
mK := min CP,K
,
cS,K cw,r,K
for all K ∈ Th , where CP,K is the constant from the Poincaré inequality (2.1). We
define the residual estimator ηR,K by
Γ ( p̃ )
IOs
h
ηR,K := mK k f + ∇ · (S∇ p̃h ) − ∇ · ( p̃h w) − r p̃h kK .
(4.5)
Let
be the modification of the Oswald interpolate IOs ( p̃h ) at the boundΓ ( p̃ ). Then the
ary given by (2.9a)–(2.9b), see Section 2.6. Denote v := p̃h − IOs
h
nonconformity estimator ηNC,K is given by
ηNC,K := |||v|||K
and the convection estimator ηC,K by
k∇ · (vw) − 12 v∇ · wkK + k∇ · (vw)kK
ηC,K := min
,
√
cw,r,K
1/2 CP,K h2K k∇v · wk2K 9kv∇ · wk2K
.
+
cS,K
4cw,r,K
(4.6)
(4.7)
Residual flux-based a posteriori error estimates for finite volumes
17
Next, let
m2σ
|σ |h2K
|σ |
, max
:= min max CF,K,σ
|K|cS,K K; σ ∈EK |K|cw,r,K
K; σ ∈EK
(4.8)
for interior or Dirichlet boundary sides. Here CF,K,σ is the constant from the generalized Friedrichs inequality (2.2). The upwinding estimator ηU,K is given by
∑
ηU,K :=
σ ∈EK \EhN
Γ
mσ k(WK,σ − hIOs
( p̃h )w · n, 1iσ )|σ |−1 kσ .
(4.9)
Finally, the reaction quadrature estimator ηRQ,K is given by
ηRQ,K := √
1
krK pK − (r p̃h , 1)K |K|−1 kK
cw,r,K
(4.10)
and the Neumann boundary estimator ηΓN ,K by
√
p
hK
ηΓN ,K := 0 + √
Ct,K,σ kuσ − ukσ ,
∑
cS,K
N
(4.11)
σ ∈EK ∩Eh
where Ct,K,σ is the constant from the trace inequality (2.3a). We then have the
following a posteriori error estimate:
Theorem 4.1 (A posteriori error estimate on the mesh Th ) Let p be the weak
solution of the problem (1.1a)–(1.1c) given by (2.5) and let p̃h satisfy (4.1)–(4.4).
Then
(
)1/2
|||p − p̃h |||Ω ≤
∑
2
ηNC,K
+
K∈Th
(
∑
(ηR,K + ηC,K + ηU,K + ηRQ,K + ηΓN ,K )2
K∈Th
)1/2
.
4.2 Local efficiency of the estimate
For K ∈ Th , let the local Péclet number PeK and ρK be given by
PeK := hK
Cw,K
,
cS,K
ρK := √
Cw,K
.
√
cw,r,K cS,K
(4.12)
Next, let
5k∇ · wk2∞,K
CS,K
2
α∗,K := cS,K
+ 8ρK , β∗,K := 12 ∇ · w + r∞,K +
,
cS,K
cw,r,K
9k∇ · wk2∞,K
CS,K
α#,K := cS,K
+CP,K Pe2K , β#,K := 12 ∇ · w + r∞,K +
,
cS,K
4cw,r,K
18
Martin Vohralı́k
and, for ϕ ∈ H 1 (K),
|||ϕ |||2∗,K := α∗,K k∇ϕ k2K + β∗,K kϕ k2K ,
|||ϕ |||2#,K := α#,K k∇ϕ k2K + β#,K kϕ k2K .
Finally, let
cS,TK := min cS,L ,
L∈TK
and, for ϕ ∈
cw,r,TK := min cw,r,L ,
L∈TK
H 1 (Th ),
|||ϕ |||2♭,Eb := cS,TK
K
∑ ∑
bL
cK σ ∈E
L∈T
+cw,r,TK
−1 2
h−1
σ kh[[ϕ ]], 1iσ |σ | kσ
∑ ∑
bL
cK σ ∈E
L∈T
hσ kh[[ϕ ]], 1iσ |σ |−1 k2σ .
The theorem below discusses the local efficiency of the a posteriori error estimators of Theorem 4.1.
Theorem 4.2 (Local efficiency of the a posteriori error estimators of Theorem 4.1) Suppose that the assumptions of Theorem 4.1 are verified. Let moreover
Th satisfy Assumption (B). Then, for the residual estimator ηR,K (4.5) on each
K ∈ Th , there holds
s
(s
(
))
CS,K
CS,K
Cw,r,K
ηR,K ≤ C3 |||p − p̃h |||K
max 1,
+ min PeK ,
ρK
,
cS,K
cw,r,K
cS,K
(4.13)
where the constant C3 only depends on the space dimension d, on maxK∈Th CP,K ,
on the shape of the elements K ∈ Th and in particular on the regularity parameter κT , on the polynomial degree l of p̃h , and on the polynomial degree k of
f , w, and r (see Lemma 4.8 below). Let next for K ∈ Th , the nonconformity and
convection estimators ηNC,K and ηC,K be respectively given by (4.6) and (4.7).
Then
α∗,K
β∗,K β∗,K h2K
α#,K
2
2
,
ηNC,K
+ ηC,K
≤ C4 min
+ min
,
cS,TK
cw,r,TK cS,TK
cS,TK
β#,K β#,K h2K
|||p − p̃h |||2TK + |||p − p̃h |||2♭,Eb
+ min
,
K
cw,r,TK cS,TK
+C4 β∗,K
inf
ch )∩H 1 (Ω )
sh ∈Rl (T
kp − sh k2TK
(4.14)
Γ
Γ
+2 max |||IOs ( p̃h ) − IOs
( p̃h )|||2∗,K , |||IOs ( p̃h ) − IOs
( p̃h )|||2#,K
with the constant C4 only depending on d, the regularity parameter κTc, and the
polynomial degree l of p̃h (see Lemma 4.9 below).
4.3 Various remarks
We give several remarks in this section. For further comments on this type of
estimators, we refer to [52, Section 5].
Residual flux-based a posteriori error estimates for finite volumes
19
4.3.1 Nature of the estimate and comparisons with different estimators
The basis for our a posteriori error estimates is the construction of the postprocessed approximation p̃h satisfying (4.1)–(4.4). This approximation is more regular than the original piecewise constant one and gives sense to the energy error.
In comparison with a posteriori error estimates used in the Galerkin finite element
method, p̃h has the crucial advantage that the normal traces of −S∇ p̃h are by (4.2)
continuous across interior sides. Hence the side error estimators penalizing the
mass balance common in Galerkin finite element methods (cf. [47]) do not appear
here at all. This advantage is, however, compensated by the fact that p̃h is nonconforming in the sense that it is not included in H 1 (Ω ), so that the estimators (4.6)
and (4.7), penalizing in fact the jumps in p̃h (cf. (4.17) in the proof of Lemma 4.9
below) come in place. Next, whereas in the lowest-order Galerkin finite element
method, ∇ · (SK ∇ph )|K is always equal to zero on all K ∈ Th , the element residuals (4.5) are relevant even if the original solution is elementwise constant.
Nicaise [37,38] also proposed a posteriori error estimators for the finite volume method. His basic idea is also to first postprocess the original piecewise
constant finite volume approximation. He uses for this purpose Morley-type interpolants. However, only the means of the fluxes of this interpolant through the
mesh sides are continuous, so that, in the general case, one has to penalize both the
improper mass balance of −S∇ p̃h and the nonconformity of p̃h . We note, however,
that in certain cases, the Morley interpolant is conforming (contained in H 1 (Ω )),
so that the nonconformity penalization disappears. Another remark in this comparison may be that the postprocessed approximation presented in [37,38] has to
be constructed differently in dependence on whether convection and reaction are
present. This on the one hand permits to prove the local efficiency of the estimates
(see the next section for the discussion of the efficiency of our estimates), but
it on the other one complicates the implementation. Finally, the question of the
a priori error estimates (convergence) of the postprocessed approximation is not
investigated in [37,38].
4.3.2 The estimate and its efficiency with respect to S and w
Concerning the estimators of Theorem 4.1, we first remark that the only constants
appearing are those of the inequalities (2.1), (2.2), and (2.3a). They are known
for matching meshes consisting of simplices or rectangular parallelepipeds. Note,
however, that their evaluation may be more complicated in the general case and
that some precaution should be made here. In particular, on nonmatching meshes
when convection is present, the assumption that |σ | ≈ hd−1
for all σ ∈ EK (now
K
not necessarily the sides of K in the geometrical sense, see Section 2.2) it is practically necessary in order that the constant CF,K,σ of (4.8) does not explode. Let us
also note that, as the numerical experiments of Section 6 below and in particular
Figure 6.5 show, all the estimators featuring these constants are superconvergent
and only important on rough grids or in the singular limits.
Concerning the efficiency of Theorem 4.2, we remark that the residual, nonconformity, and convection estimators are semi-robust with respect to the inhomogeneities in the sense that the local efficiency does not depend on the maximal ratio
of the inhomogeneities over the whole domain, but for a given element K, only on
20
Martin Vohralı́k
the maximal ratio
p over K and elements sharing a vertex with K; this is the meaning of the term α∗,K /cS,TK from Theorem 4.2. Under the “monotonicity around
vertices” assumption on the distribution of the diffusion tensor (cf. Bernardi and
Verfürth [14, Hypothesis 2.7]) and using the Oswald interpolation operator with
diffusion tensor-dependent weights following Ainsworth [7], the present estimators would become robust with respect to inhomogeneities.
The local efficiency
p
with respect to anisotropy is then expressed by CS,K /cS,K and is always local
in a given K. Next, one can easily see that the local efficiency gets to optimal
values as soon as only the local Péclet number (4.12), not the global one, gets
sufficiently small. We finally remark that for the nonconformity and convection
estimators, the above statements are only valid up to higher-order terms (the part
infs ∈R (Tc)∩H 1 (Ω ) ), which is, however, only present when 12 ∇ · w + r > 0. Moreh
l
h
over, it follows from Lemma 4.9 that these terms disappear when only the terms
β∗,K h2K /cS,TK and not the minimum of these terms and of β∗,K /cw,r,TK (and similarly for #) in (4.14) are present. Note also that the error in the approximation of
the boundary conditions is left aside from these considerations by the last term of
2
2 . We finally point on the conceptual difference
the estimate (4.14) on ηNC,K
+ ηC,K
with the mixed finite element methods, see [52, Theorem 4.4]. There p̃h is such
that h[[ p̃h ]], 1iσ = 0 for all σ ∈ Ehint and one has the local efficiency in the original
energy norm. Here, in contrast, the additional term |||p− p̃h |||2 b appears, see also
♭,EK
Remark 3.3 in this respect.
Next, note that the reaction quadrature estimator is zero whenever r is piecewise constant and µK from (3.14b) is set to zero. If this is not the case, its influence is as that of a quadrature formula—see Section 6.2 below for an example
of its influence in a numerical
experiment. One could eliminate this estimator by
considering directly (r p̃h , 1 K in (4.3). In what concerns the Neumann boundary
estimator, it only penalizes the fact that the Neumann boundary condition is not
exactly satisfied by the approximate solution p̃h when it is not given by a piecewise
constant function. It has a form similar to Neumann boundary estimators from the
finite element method, see [47].
Finally, the fact that the upwinding estimator cannot in general give a lower
bound for the error is quite obvious and explained in [52, Section 5.2]. The numerical experiments for finite volumes presented below in Section 6.2, however,
show that this estimator represents a higher-order term as soon as the local Péclet
number gets small and when the upstream weighting (3.8)–(3.12), modified in
the sense of Remark 3.1, is used. Similarly to the reaction quadrature estimator,
Γ ( p̃ ) in the disthis estimator would completely disappear while employing IOs
h
cretization of the convective term. We, however, notice that such a convective
flux does not seem too much appealing for practical computations: whereas the
scheme (3.1)–(3.12) on admissible triangular meshes is very simple and leads to
Γ ( p̃ ) in the discretization of the convection term
a 4-point stencil, employing IOs
h
would complicate the definition of the scheme and imply instead of 4 at around 20
nonzero values on each matrix row.
Residual flux-based a posteriori error estimates for finite volumes
21
4.3.3 The estimate for pure diffusion problems
When w = r = 0, on simplices or on a rectangular parallelepipeds when S is diagonal and with p̃h constructed as in Section 3.2.1 or 3.2.2, (4.3) implies −∇ ·
(SK ∇ p̃h ) = fK for all K ∈ Th . Thus using the fact that s ∈ H 1 (Ω ) such that s|ΓD = g
in the sense of traces in Lemma 4.2 below can be chosen arbitrarily, our a posteriori error estimate becomes
(
)1/2
|||p − p̃h |||Ω ≤
inf
s∈H 1 (Ω ), s|ΓD =g
||| p̃h − s|||Ω +
∑
(ηR,K + ηΓN ,K )2
. (4.15)
K∈Th
p
√
Note that the residual estimator becomes ηR,K = hK CP,K / cS,K k f − fK kK , a
superconvergent term usually considered separately and called “data oscillation”.
Apparently, it is for this reason that our estimators are almost asymptotically exact
and robust in the numerical experiments presented below in Section 6. For further
remarks on this point, we refer to [52, Section 5.3] and to [55].
4.3.4 Further generalizations of Theorem 4.1
We remark that for the a posteriori estimate of Theorem 4.1 itself, p̃h does not
necessarily have to be a polynomial on each K ∈ Th , p̃h ∈ H 1 (Th ) would be sufficient. The assumption that p̃h ∈ Rl (Th ) is only necessary in the given proof of
the local efficiency. The postprocessed approximation p̃h could thus be, in the finite volume setting, obtained from (3.14a)–(3.14c) on general elements. As this,
however, not at all practical, a different approach is developed in Section 5 below.
4.4 Proof of the a posteriori error estimate
We give in this section a proof of Theorem 4.1. To begin with, we recall the following lemma ([52, Lemma 7.1]):
Lemma 4.1 (Abstract framework) Let p, s ∈ H 1 (Ω ) be such that p−s ∈ HD1 (Ω )
and let p̃ ∈ H 1 (Th ) be arbitrary. Then
p−s
|||p − p̃|||Ω ≤ ||| p̃ − s|||Ω + B p − p̃,
|||p − s|||Ω
p−s
1
.
+ ∑ ∇ · (( p̃ − s)w) − 2 ( p̃ − s)∇ · w,
|||p − s|||Ω K K∈T
h
Consequently, the following bound for the error |||p − p̃h |||Ω holds:
Lemma 4.2 (Abstract error estimate) Let the assumptions of Theorem 4.1 be
verified and let s ∈ H 1 (Ω ) such that s|ΓD = g in the sense of traces be arbitrary.
Then
|||p − p̃h |||Ω ≤ ||| p̃h − s|||Ω +
sup
TR (ϕ ) + TC (ϕ )
ϕ ∈HD1 (Ω ), |||ϕ |||Ω =1
+TU (ϕ ) + TRQ (ϕ ) + TΓN (ϕ ) ,
22
Martin Vohralı́k
where
TR (ϕ ) :=
∑
K∈Th
TC (ϕ ) :=
∑
K∈Th
TU (ϕ ) :=
TRQ (ϕ ) :=
∇ · (( p̃h − s)w) − 12 ( p̃h − s)∇ · w, ϕ
+h(s − p̃h )w · n, ϕK i∂ K ,
∑ ∑
K∈Th σ ∈EK
(rK pK − (r p̃h , 1)K |K|−1 , ϕK )K ,
∑
huσ − u, ϕ − ϕσ iσ ,
σ ∈EhN
K
,
K
h(WK,σ − hsw · n, 1iσ )|σ |−1 , ϕK iσ ,
∑
K∈Th
TΓN (ϕ ) :=
f + ∇ · (S∇ p̃h ) − ∇ · ( p̃h w) − r p̃h , ϕ − ϕK
and where ϕK is the mean of ϕ over K ∈ Th , ϕK := (ϕ , 1)K /|K|, and ϕσ is the
mean of ϕ over σ ∈ Eh , ϕσ := hϕ , 1iσ /|σ |.
Proof Let us consider an arbitrary ϕ ∈ HD1 (Ω ). We have, using the bilinearity of
B(·, ·), the definition (2.5) of the weak solution p, and the Green theorem in each
K ∈ Th ,
B(p − p̃h , ϕ )
= ( f , ϕ )Ω − hu, ϕ iΓN −
=
∑
K∈Th
∑
K∈Th
(4.16)
(S∇ p̃h , ∇ϕ )K + ∇ · ( p̃h w), ϕ K + (r p̃h , ϕ )K
f + ∇ · (S∇ p̃h ) − ∇ · ( p̃h w) − r p̃h , ϕ
K
+
∑
σ ∈EK ∩ΓN
huσ − u, ϕ iσ .
Note that we have in particular used the continuity of the normal trace of S∇ p̃h
across interior sides following from (4.2), the fact that hS∇ p̃h · n, ϕ iσ = 0 for
σ ∈ EhD following by ϕ ∈ HD1 (Ω ), and finally (4.4) for Neumann boundary sides.
If σ ∈ EhN , notice, moreover, that huσ − u, ϕ iσ = huσ − u, ϕ − ϕσ iσ , since huσ −
u, ϕσ iσ = 0 by (3.6) (recall that ϕσ is a constant).
Now by the local conservativity assumption (4.3), it follows that
f + ∇ · (S∇ p̃h ) − ∇ · ( p̃h w) − r p̃h , ϕK K + h p̃h w · n, ϕK i∂ K − ϕK ∑ WK,σ
+(r p̃h , ϕK )K − ϕK rK pK |K| ± hsw · n, ϕK i∂ K = 0
∀K ∈ Th ,
σ ∈EK
using that ϕK is the constant mean of ϕ over K and that (∇ · ( p̃h w), 1)K = h p̃h w ·
n, 1i∂ K by the Green theorem. Hence we can subtract this term from each summand in (4.16). To conclude the proof, if now suffices to use Lemma 4.1. ⊓
⊔
Remark 4.1 (Upwinding and reaction quadrature estimators) Using the fact that
ϕK is constant, we have subtracted in the above proof the term hsw · n, 1iσ |σ |−1
instead of sw·n in TU (ϕ ). As for a function ψ ∈ L2 (σ ), khψ , 1iσ |σ |−1 kσ ≤ kψ kσ ,
this can considerably reduce the size of the upwinding estimator and it was indeed
necessary in the numerical experiments of Section 6.2 below. A similar remark
applies to TRQ (ϕ ) as well.
Residual flux-based a posteriori error estimates for finite volumes
23
We now estimate the terms TR , TC , TU , TRQ , and TΓN separately, putting s =
Γ ( p̃ ) in Lemma 4.2.
IOs
h
Lemma 4.3 (Residual estimate) Let ϕ ∈ HD1 (Ω ) be arbitrary. Then
TR (ϕ ) ≤
∑
K∈Th
ηR,K |||ϕ |||K ,
where ηR,K is given by (4.5).
Proof The Schwarz inequality and Lemma 7.1 from Section 7 below imply
TR (ϕ ) ≤ ∑ f + ∇ · (S∇ p̃h ) − ∇ · ( p̃h w) − r p̃h K kϕ − ϕK kK
K∈Th
≤
∑
K∈Th
ηR,K |||ϕ |||K . ⊓
⊔
Lemma 4.4 (Convection estimate) Let ϕ ∈ HD1 (Ω ) be arbitrary. Then
TC (ϕ ) ≤
∑
K∈Th
ηC,K |||ϕ |||K ,
where ηC,K is given by (4.7).
Γ ( p̃ ). Then, for each K ∈ T ,
Proof Denote v := p̃h − IOs
h
h
∇ · (vw) − 12 v∇ · w, ϕ K − hvw · n, ϕK i∂ K
= ∇ · (vw) − 12 v∇ · w, ϕ K − (∇ · (vw), ϕK )K
∇ · (vw) − 1 v∇ · w + k∇ · (vw)kK
2
K
≤
|||ϕ |||K ,
√
cw,r,K
using the Green theorem. Alternatively,
(∇v · w, ϕ − ϕK )K + 12 v∇ · w, ϕ K − (v∇ · w, ϕK )K
p
CP,K hK k∇v · wkK √
3kv∇ · wkK √
≤
cS,K k∇ϕ kK + √
cw,r,K kϕ kK
√
cS,K
2 cw,r,K
1/2
CP,K h2K k∇v · wk2K 9kv∇ · wk2K
≤
+
|||ϕ |||K ,
cS,K
4cw,r,K
employing the Cauchy–Schwarz inequality and the Poincaré inequality (2.1).
Lemma 4.5 (Upwinding estimate) Let ϕ ∈ HD1 (Ω ) be arbitrary. Then
TU (ϕ ) ≤
where ηU,K is given by (4.9).
∑
K∈Th
ηU,K |||ϕ |||K ,
⊓
⊔
24
Martin Vohralı́k
Proof We have
∑
TU (ϕ ) =
σK,L ∈Ehint
+
∑
Γ
h(WK,σK,L − hIOs
( p̃h )w · nK , 1iσK,L )|σK,L |−1 , ϕK − ϕL iσK,L
σK ∈EhD
Γ
h(WK,σK − hIOs
( p̃h )w · nK , 1iσK )|σK |−1 , ϕK iσK ,
Γ ( p̃ ) are continuous across interelement sides, a
using that w · n as well as IOs
h
similar continuity of the finite volume convective fluxes WK,σ , and (2.9b). Let
σK,L ∈ Ehint and let us put ϕσK,L := hϕ , 1iσK,L /|σK,L |. Then
kϕK − ϕL kσK,L ≤ kϕK − ϕσK,L kσK,L + kϕL − ϕσK,L kσK,L
1/2
|σK,L |h2M
CF,M,σK,L
≤ max
(|||ϕ |||K + |||ϕ |||L)
|M|cS,M
M={K,L}
by the triangle inequality and the first estimate of Lemma 7.2 from Section 7
below. At the same time,
kϕK − ϕL kσK,L ≤ kϕK kσK,L + kϕL kσK,L
1/2
|σK,L |
≤ max
(|||ϕ |||K + |||ϕ |||L),
M={K,L} |M|cw,r,M
using the triangle inequality and the second estimate of Lemma 7.2. Similar estimates on kϕK kσK for σK ∈ EhD follow directly from Lemma 7.2 using that ϕσK = 0
on Dirichlet boundary sides by ϕ ∈ HD1 (Ω ). Hence, with mσ given by (4.8),
(
)
TU (ϕ ) ≤
=
∑
σ ∈Eh \EhN
∑
K∈Th
(
Γ
mσ k(WK,σ − hIOs
( p̃h )w · n, 1iσ )|σ |−1 kσ
∑
σ ∈EK \EhN
∑
K; σ ∈EK
Γ
mσ k(WK,σ − hIOs
( p̃h )w · n, 1iσ )|σ |−1 kσ
Noticing the definition of ηU,K by (4.9) concludes the proof.
|||ϕ |||K
)
|||ϕ |||K .
⊓
⊔
Lemma 4.6 (Reaction quadrature estimate) Let ϕ ∈ HD1 (Ω ) be arbitrary. Then
TRQ (ϕ ) ≤
∑
K∈Th
ηRQ,K |||ϕ |||K ,
where ηRQ,K is given by (4.10).
Proof The Schwarz inequality and the definition of ||| · |||K by (2.4) imply
TR (ϕ ) ≤ ∑ rK pK − (r p̃h , 1)K |K|−1 kK kϕ kK ≤ ∑ ηRQ,K |||ϕ |||K . ⊓
⊔
K∈Th
K∈Th
Residual flux-based a posteriori error estimates for finite volumes
25
Lemma 4.7 (Neumann boundary estimate) Let ϕ ∈ HD1 (Ω ) be arbitrary. Then
TΓN (ϕ ) ≤
∑
K∈Th
ηΓN ,K |||ϕ |||K ,
where ηΓN ,K is given by (4.11).
Proof We have, using the trace inequality (2.3a) and the definition of ||| · |||K
by (2.4),
TΓN (ϕ ) =
∑
∑
K∈Th σ ∈EK ∩E N
huσ − u, ϕ − ϕσ iσ
h
≤
∑
K∈Th
1/2
k∇ϕ kK hK
∑
σ ∈EK ∩EhN
1/2
Ct,K,σ kuσ − ukσ ≤
∑
K∈Th
ηΓN ,K |||ϕ |||K . ⊓
⊔
Lemmas 4.1–4.7 and the Cauchy–Schwarz inequality prove Theorem 4.1.
4.5 Proof of the local efficiency of the estimate
We give in this section a proof of Theorem 4.2.
Lemma 4.8 (Local efficiency of the residual estimator) Let K ∈ Th and let ηR,K
be the residual estimator given by (4.5). Then, under assumptions of Theorem 4.2,
(4.13) holds true.
The proof of this lemma follows the one given in [47], is based on the equivalence of norms on finite-dimensional spaces, the inverse inequality, and the definition of ||| · |||K by (2.4), see [52, Lemma 7.6] for the simplicial case.
Lemma 4.9 (Local efficiency of the nonconformity and velocity estimators)
Let K ∈ Th and let ηNC,K and ηC,K be the nonconformity and velocity estimators
given respectively by (4.6) and (4.7). Then, under assumptions of Theorem 4.2,
(4.14) holds true.
ch ) ∩
Proof Let us first recall that by construction of Section 2.6, IOs ( p̃h ) ∈ Rl (T
1
c
H (Ω ) is the Oswald interpolate of p̃h taken as an element of Rl (Th ). We will use
this fact in the proof.
To begin, it is easy to show that
2
2
Γ
Γ
ηNC,K
+ ηC,K
≤ min ||| p̃h − IOs
( p̃h )|||2∗,K , ||| p̃h − IOs
( p̃h )|||2#,K
with ||| · |||∗,K and ||| · |||#,K defined in Section 4.2. Thus
2
2
ηNC,K
+ ηC,K
≤ 2 min ||| p̃h − IOs ( p̃h )|||2∗,K , ||| p̃h − IOs ( p̃h )|||2#,K
Γ
Γ
( p̃h )|||2∗,K , |||IOs ( p̃h ) − IOs
( p̃h )|||2#,K
+2 max |||IOs ( p̃h ) − IOs
follows immediately. The rest of the proof, devoted to showing a bound on ||| p̃h −
IOs ( p̃h )|||∗,K , follows the path of that given in [52, Lemma 7.7]. The proof for
||| p̃h − IOs ( p̃h )|||#,K can be established likewise.
26
Martin Vohralı́k
Let henceforth C denote a constant only depending on d, κTc, and l, not necessarily the same at each occurrence. It follows directly from Lemma 2.1 and the
definition of ||| · |||∗,K that
||| p̃h − IOs ( p̃h )|||2∗,K ≤ C α∗,K
+β∗,K
We will next use the inequality
−1/2
hσ
k[[ψh ]]kσ ≤ C
∑ ∑
b
M∈Tc
K σ ∈E M
∑ ∑
bM
cK σ ∈E
M∈T
∑
L;σ ∈EbL
2
h−1
σ k[[ p̃h ]]kσ
hσ k[[ p̃h ]]k2σ
!
.
(4.17)
k∇(ψh − ϕ )kL ,
(4.18)
ch ) such that h[[ψh ]], 1iσ = 0, and ϕ ∈ H 1 (Ω ) are arwhere σ ∈ Ebhint , ψh ∈ H 1 (T
bitrary. This inequality was established in [2, Theorem 10] for simplicial meshes
and it generalizes easily to rectangular parallelepipeds. The triangle inequality, the
fact that h[[p]], 1iσ = 0, and a few manipulations then imply
−1/2
hσ
k[[ p̃h ]]kσ ≤ C
Thus, finally,
∑
−1/2
L;σ ∈EbL
k∇( p̃h − ϕ )kL + hσ
γ +1
γ
hσ k[[ p̃h ]]k2σ ≤
Chσ
minL;σ ∈Eb cS,L
L
∑
L;σ ∈EbL
kh[[p − p̃h ]], 1iσ |σ |−1 kσ .
γ
kS∇( p̃h − p)k2L +2hσ kh[[p− p̃h ]], 1iσ |σ |−1 k2σ ,
ch ) such that h[[ψh ]], 1iσ =
where we put γ = −1, 1. Next, for an arbitrary ψh ∈ Rl (T
1
c
0 and an arbitrary sh ∈ Rl (Th ) ∩ H (Ω ),
∑
1/2
hσ k[[ψh ]]kσ ≤ hσ C
≤C
L;σ ∈EbL
∑
L;σ ∈EbL
k∇(ψh − sh )kL ≤ C
kψh − sh kL ≤ C
∑
L;σ ∈EbL
∑
L;σ ∈EbL
hL k∇(ψh − sh )kL
kψh − pkL +C
∑
L;σ ∈EbL
kp − sh kL ,
using (4.18), the inverse inequality, and the triangle inequality. Hence
1
1
∇ · w + r 1/2 ( p̃h − p)2 (4.19)
hσ k[[ p̃h ]]k2σ ≤ C
∑
2
L
minL;σ ∈Eb cw,r,L
b
L
+C
∑
L;σ ∈EbL
L;σ ∈EL
kp − sh k2L + 2hσ kh[[p − p̃h ]], 1iσ |σ |−1 k2σ
holds as well, which gives a sense when all cw,r,L for L such that σ ∈ EbL are
nonzero. Combining estimates (4.17)–(4.19) while estimating minL;σ ∈Eb cL for a
L
side σ such that σ ∩ K 6= 0/ from below by minL∈TK cL and a few manipulations
conclude the proof. ⊓
⊔
Lemmas 4.8–4.9 together prove Theorem 4.2.
Residual flux-based a posteriori error estimates for finite volumes
27
5 Estimates on arbitrary polygonal grids by the solution of local Neumann
problems
We propose here an approach alternative to finding p̃h satisfying (4.1)–(4.4), which
may be difficult (impossible) to carry out practically on arbitrary polygonal grids.
This approach is motivated by the simple postprocessing (3.14a)–(3.14c) of the
finite volume case on simplices. We only consider in this section pure diffusion
problems (w = r = 0).
Let thus Th be a (nonmatching) grid consisting of arbitrary polygons and let
ch be its matching refinement consisting of simplices and satisfying AssumpT
tion (A) (cf. Assumption (B3)). Let a locally conservative scheme be given on
Th . This scheme then should define discrete diffusive fluxes SK,σ , K ∈ Th and
σ ∈ EK , and relation like (3.1) should hold. Now instead of directly searching
p̃h verifying (4.1)–(4.4), let us consider approximations by, e.g., the given locally
conservative method to the local Neumann problems (3.14a)–(3.14c) on the simcK of K, for all K ∈ Th . Suppose moreover that for K ∈ Th , the given
plicial grids T
scheme preserve exactly the given Neumann boundary fluxes SK,σ , σ ∈ EK (this is
the case of the majority of locally conservative methods) and note that by (3.14b),
cK , will be closely related to the original pK .
the approximate values pL , L ∈ T
ch is simplicial, we can immediately use the postprocessNow since the mesh T
c
ing (3.14a)–(3.14c) on Th in order to construct a piecewise second-order polynoch and have all the results of Section 4
mial p̃h satisfying (4.1)–(4.4) on the mesh T
c
for this p̃h . Note in particular that if TK for some K ∈ Th only contains K, i.e.,
when K is itself a simplex, then the present approach coincides with constructing
p̃h |K directly by (3.14a)–(3.14c).
We summarize the above results in the following theorem:
Theorem 5.1 (A posteriori error estimate for pure diffusion problems on arbitrary polygonal grids by the solution of local Neumann problems) Let p be
the weak solution of the problem (1.1a)–(1.1c) given by (2.5), with w = r = 0. Let
ch be its matching refinement, consisting of simTh satisfy Assumption (B) and let T
plices. Next, let a locally conservative scheme of the form (3.1) on Th be given and
let p̃h be given by the approximations of (3.14a)–(3.14c) on the simplicial grids
cK of K for all K ∈ Th and the subsequent postprocessing by (3.14a)–(3.14c) on
T
c
Th in the sense described above. Then p̃h satisfies (4.1)–(4.4) and all the results
ch .
of Section 4 hold true for this p̃h on the mesh T
Remark 5.1 (Relation to a posteriori error estimates based on the solution of local Neumann problems in the finite element method) Bank and Weiser [11] derive
a posteriori error estimates in the finite element method on the basis of approximate solution of local Neumann problems. In their case, the solutions of the local
problems serve to define an a posteriori error estimator for the original finite element approximation. Contrarily, we have in this section used the solutions of the
local problems in order to define a new approximate solution, for which we can
easily give an a posteriori estimate.
28
Martin Vohralı́k
6 Numerical experiments
We test our a posteriori error estimates on two model problems in this section. The
first problem contains a strongly inhomogeneous diffusion–dispersion tensor and
the second one is convection-dominated. In both cases, the analytical solution is
known.
We use the finite volume scheme (3.1)–(3.12), which we extend from triangular grids admissible in the sense of [28, Definition 9.1] to strictly Delaunay
triangular meshes (the circumcircle of each triangle does not contain any vertex
in its interior or on its boundary and no circumcenters of boundary triangles lie
outside the domain or on its boundary), cf. [28, Example 9.1]. The harmonic averaging (3.7b) for the diffusion–dispersion tensor is employed while modifying it in
the sense of Remark 3.2, i.e., by taking into account the distances of the circumcenters xK , K ∈ Th , from the sides of K. When σK,L ∈ Ehint and xK lies in L (which
may happen for strictly Delaunay triangular meshes), sK,L = sL . When convection
is present, we use the local Péclet upstream weighting (3.8)–(3.12), modified in the
sense of Remark 3.1. The postprocessed potential p̃h is given by (3.14a)–(3.14c)
with µK = 1 for all K ∈ Th and xK being the circumcenter of K, see Section 3.2.1.
All these choices seem to be important for the presented numerical results of our
a posteriori error estimates.
6.1 Model problem with strongly inhomogeneous diffusion–dispersion tensor
This model problem is taken from [42,25] and is motivated by the fact that in
real-life applications, the diffusion–dispersion tensor S may be discontinuous and
strongly inhomogeneous. We consider in particular Ω = (−1, 1) × (−1, 1) and the
equation (1.1a) with w = 0, r = 0, and f = 0. We suppose that Ω is divided into
four subdomains Ωi corresponding to the axis quadrants (in the counterclockwise
direction) and that S is constant and equal to si Id in Ωi . Under such conditions,
analytical solution writing
p(r, θ )|Ωi = rα (ai sin(αθ ) + bi cos(αθ ))
in each Ωi can be found. Here (r, θ ) are the polar coordinates in Ω , ai and bi
are constants depending on Ωi , and α is a parameter. This solution is continuous
across the interfaces but only the normal component of its flux u = −S∇p is continuous; it finally exhibits a singularity at the origin. We assume Dirichlet boundary conditions given by this solution and consider two sets of the coefficients,
with s1 = s3 = 5, s2 = s4 = 1 in the first case and s1 = s3 = 100, s2 = s4 = 1 in the
second one:
α = 0.53544095
a1 = 0.44721360
b1 = 1
a2 = −0.74535599
b2 = 2.33333333
a3 = −0.94411759
b3 = 0.55555556
a4 = −2.40170264
b4 = −0.48148148,
Residual flux-based a posteriori error estimates for finite volumes
1
0.035
0.8
29
1
0.8
0.025
0.03
0.6
0.6
0.025
0.4
0.2
0.02
0.4
0.2
0.02
0
0
−0.2
0.015 −0.2
−0.4
0.01
−0.6
−0.8
0.005 −0.8
−0.5
0
0.5
1
0.01
−0.4
−0.6
−1
−1
0.015
−1
−1
0.005
−0.5
0
0.5
1
Fig. 6.1 Estimated (left) and actual (right) error distribution, α = 0.53544095
α = 0.12690207
a1 = 0.1
b1 = 1
a2 = −9.60396040
b2 = 2.96039604
a3 = −0.48035487
b3 = −0.88275659
a4 = 7.70156488
b4 = −6.45646175 .
The original grid consisted of 112 triangles and we have refined it either uniformly (up to 4 refinements) or adaptively on the basis of our estimator. The latter
case is a little complicated, since we need the refined mesh to still be strictly Delaunay, and hence the usual “longest edge” refinement or its variants cannot be
used. We thus use the following concept: to the given set of vertices, we first add
those which correspond to edges midpoints of such triangles where the estimated
||| · |||Ω -error is greater than the half of the maximum of the estimators. Then the
Triangle mesh generator, see Shewchuk [44], is used to produce a mesh which
comprises the given set of vertices, respects the four subdomains, and guarantees
a minimal angle (20 degrees in the given case). This mesh is then checked for
the (uniform) strict Delaunay condition: the sum of the two opposite angles for
each interior edge has to be less than or equal to π − α where α is a positive
constant and similarly at the boundary. If it does not satisfy this condition, further vertices are added and the process is repeated until the mesh is (uniformly)
strictly Delaunay. Since f = 0, the residual estimators ηR,K (4.5) are zero for each
K ∈ Th (recall that this would be the case for general piecewise constant f , cf.
Section 4.3.3), and hence the a posteriori error estimate is entirely given by the
nonconformity estimator ηNC,K (4.6).
We give in Figure 6.1 an example of our a posteriori estimate on the error and
its distribution and the actual error and its distribution on an adaptively refined
mesh for the first test case. We can see that the predicted distribution is excellent and that in particular even in this case where the solution is smoother, the
singularity is well recognized. Next, Figure 6.2 gives an example of the approximate solution on an adaptively refined mesh and this mesh in the second test case.
Here, the singularity is much more important and consequently the grid is highly
refined around the origin (for an adaptively refined grid of 2000 triangles, the diameter of the smallest triangles near the origin is 10−15 and 80% of the triangles
are contained in the circle of radius 0.1). Figure 6.3 then reports the estimated and
30
Martin Vohralı́k
1
0.8
0.6
1
0.4
0.5
0.2
p
0
0
−0.5
−0.2
−1
−0.4
1
−0.6
1
0.5
−0.8
0.5
0
0
−0.5
−1
−0.5
−1 −1
y
x
Fig. 6.2 Approximate solution and the corresponding adaptively refined mesh, α = 0.12690207
1
2
10
10
error uniform
estimate uniform
error adapt.
estimate adapt.
error uniform
estimate uniform
error adapt.
estimate adapt.
0
Energy error
Energy error
10
1
10
−1
10
−2
10
0
2
10
3
4
10
10
Number of triangles
10 2
10
5
10
3
4
5
10
10
Number of triangles
10
Fig. 6.3 Estimated and actual error against the number of elements in uniformly/adaptively
refined meshes for α = 0.53544095 (left) and α = 0.12690207 (right)
1.6
4
efficiency uniform
efficiency adapt.
1.55
efficiency uniform
efficiency adapt.
3.8
1.5
3.4
1.45
3.2
1.4
Efficiency
Efficiency
3.6
1.35
1.3
3
2.8
2.6
2.4
2.2
1.25
2
1.2
1.8
1.6
1.15
1.1 2
10
1.4
3
4
10
10
Number of triangles
5
10
1.2 2
10
3
4
10
10
Number of triangles
5
10
Fig. 6.4 Overall efficiency of the a posteriori error estimates against the number of elements in
uniformly/adaptively refined meshes for α = 0.53544095 (left) and α = 0.12690207 (right)
Residual flux-based a posteriori error estimates for finite volumes
2
0
error uniform
est. uniform
est. res. uniform
est. nonc. uniform
est. upw. uniform
est. react. uniform
est. conv. uniform
10
−1
10
efficiency uniform
1.9
1.8
1.7
−2
Efficiency
Energy error
31
10
−3
10
1.6
1.5
1.4
−4
10
1.3
−5
10
1
10
2
10
3
10
Number of triangles
4
10
5
10
1.2 1
10
2
10
3
10
Number of triangles
4
10
5
10
Fig. 6.5 Estimated and actual error and the different estimators (left) and overall efficiency
(right) against the number of elements, ε = 1, a = 0.5
actual errors on uniformly/adaptively refined grids in the two test cases. The energy seminorm (2.4) was approximated with a 7-point quadrature formula in each
triangle. One can clearly substantially reduce the number of unknowns necessary
to attain the prescribed precision using the derived a posteriori error estimates and
adaptively refined grids. Finally, we can see in Figure 6.4 the efficiency plots for
the two cases, giving the ratio of the estimated ||| · |||Ω -error to the actual ||| · |||Ω error. This quantity simply expresses how many times we have overestimated the
actual error—recall that there are no undetermined multiplicative constants in our
estimates. These plots confirm the theoretical results of Section 4.3.3. Even while
only using IOs ( p̃h ) instead of evaluating the infimum in (4.15), (approximate)
asymptotic exactness and robustness with respect to inhomogeneities is confirmed.
6.2 Convection-dominated model problem
This problem is a modification of a problem considered in [26]. We put Ω =
(0, 1)×(0, 1), w = (0, 1), and r = 1 in (1.1a) and consider three cases with S = ε Id
and ε equal to, respectively, 1, 10−2 , and 10−4 . The right-hand side term f , Neumann boundary conditions on the upper side, and Dirichlet boundary conditions
elsewhere are chosen so that the solution was
0.5 − x
p(x, y) = 0.5 1 − tanh
.
a
This solution is in fact one-dimensional and possesses an internal layer of width
a which we set, respectively, equal to 0.5, 0.05, and 0.02. We start the computations from an unstructured grid of Ω consisting of 46 triangles and refine it either
uniformly (up to 5 refinements) or adaptively.
For ε = 1 and a = 0.5 (diffusion-dominated regime), estimated and actual
errors in the energy norm (2.4), the different estimators, and the efficiency on
uniformly refined grids are reported in Figure 6.5. Note in particular that in this
regime, the residual, convection, and upwinding estimators represent higher-order
terms and that the influence of the reaction quadrature estimator is limited. Finally,
our estimator reproduced very precisely the distribution of the error in this case.
32
Martin Vohralı́k
−3
x 10
1
−3
x 10
2.2
1
18
0.9
0.9
2
0.8
1.8
0.7
1.6
16
0.8
14
0.7
12
0.6
10
0.5
1.4
0.6
1.2
0.5
1
0.4
8
0.4
0.3
6
0.3
0.2
4
0.2
0.1
2
0.1
0.8
0
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.6
0.4
0.2
0
0
1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
Fig. 6.6 Estimated (left) and actual (right) error distribution, ε = 10−2 , a = 0.05
1
1
0.9
0.8
1
0.8
0.7
0.8
0.6
0.4
0.4
0.6
y
0.5
p
0.6
0.4
0.3
0.2
1
0.6
0.8
0.6
0.1
0.4
0.4
y
0.2
0.2
0
0
0.2
0.2
0.8
0
1
0
0
0
x
0.2
0.4
0.6
0.8
1
x
Fig. 6.7 Approximate solution and the corresponding adaptively refined mesh, ε = 10−4 , a =
0.02
1
10
error uniform
estimate uniform
error adapt.
estimate adapt.
0
error uniform
estimate uniform
error adapt.
estimate adapt.
1
10
Energy error
Energy error
10
−1
10
0
10
−1
10
−2
10
−3
10
−2
1
10
2
10
3
10
Number of triangles
4
10
5
10
10
1
10
2
10
3
10
Number of triangles
4
10
5
10
Fig. 6.8 Estimated and actual error against the number of elements in uniformly/adaptively
refined meshes for ε = 10−2 , a = 0.05 (left) and ε = 10−4 , a = 0.02 (right)
Residual flux-based a posteriori error estimates for finite volumes
12
100
efficiency uniform
efficiency adapt.
11
80
9
70
8
Efficiency
Efficiency
efficiency uniform
efficiency adapt.
90
10
7
6
60
50
40
5
4
30
3
20
2 1
10
33
2
10
3
10
Number of triangles
4
10
5
10
10 1
10
2
10
3
10
Number of triangles
4
10
5
10
Fig. 6.9 Overall efficiency of the a posteriori error estimates against the number of elements in
uniformly/adaptively refined meshes for ε = 10−2 , a = 0.05 (left) and ε = 10−4 , a = 0.02 (right)
For ε = 10−2 and a = 0.05 (convection-dominated regime on coarse meshes
and diffusion-dominated regime with progressive refinement), still the distribution
of the error is predicted very well, cf. Figure 6.6. Note in particular the correct localization of the error away from the center of the shock, as well as the sensitivity
of our estimator to the shape of the elements. Next, an example of an adaptively
refined mesh and of the corresponding solution for ε = 10−4 and a = 0.02 is given
in Figure 6.7. The problem with keeping the refined mesh uniformly strictly Delaunay reveals as very severe in this case. For this reason, much more vertices are
added at a time: the refinement criterion is set to 0.2- and 0.02-times the maximum
of the estimators for ε = 10−2 , a = 0.05, and ε = 10−4 , a = 0.02, respectively.
The estimated and actual errors for these cases are plotted against the number of
elements in uniformly/adaptively refined meshes in Figure 6.8. Again, one can
see that we can substantially reduce the number of unknowns necessary to attain
the prescribed precision using the derived a posteriori error estimates and adaptively refined grids. Finally, the efficiency plots are given in Figure 6.9. In the first
case, the efficiency is almost optimal for finest grids, whereas in the second one,
not even the elements in the refined shock region start to leave the convectiondominated regime, a point where the efficiency would start to decrease.
7 Auxiliary results
We give in this section two auxiliary results that were needed in the paper.
Lemma 7.1 Let K ∈ Th , let ϕ ∈ H 1 (K), and let ϕK be the mean of ϕ over K given
by ϕK := (ϕ , 1)K /|K|. Then
h2K
1
2
kϕ − ϕK kK ≤ min CP,K
,
|||ϕ |||2K .
cS,K cw,r,K
Proof The Poincaré inequality (2.1) and the definition of ||| · |||K by (2.4) imply
kϕ − ϕK k2K ≤ CP,K h2K k∇ϕ k2K ≤ CP,K
h2K
|||ϕ |||2K .
cS,K
34
Martin Vohralı́k
Next, the estimate
kϕ − ϕK k2K ≤ kϕ k2K ≤
1
|||ϕ |||2K
cw,r,K
follows from the fact that ϕK is an orthogonal projection of ϕ onto a constant and
from the definition of ||| · |||K by (2.4). ⊓
⊔
Lemma 7.2 Let K ∈ Th , let ϕ ∈ H 1 (K), and let ϕK be the mean of ϕ over K
given by ϕK := (ϕ , 1)K /|K| and ϕσ the mean of ϕ over σ ∈ EK given by ϕσ :=
hϕ , 1iσ /|σ |, respectively. Then
kϕK − ϕσ k2σ ≤ CF,K,σ
and
kϕK k2σ ≤
|σ |h2K
|||ϕ |||2K
|K|cS,K
|σ |
|||ϕ |||2K .
|K|cw,r,K
Proof Let us put ϕ̃ := ϕ − ϕσ and ϕ̃K := (ϕ̃ , 1)K /|K|. We now note that ϕ̃σ :=
hϕ̃ , 1iσ /|σ | = 0 and that ∇ϕ̃ = ∇ϕ , which allows us to estimate
kϕK − ϕσ k2σ = ϕ̃K2 |σ | ≤
|σ |
|σ |h2K
|σ |h2K
|||ϕ |||2K ,
kϕ̃ k2K ≤ CF,K,σ
k∇ϕ k2K ≤ CF,K,σ
|K|
|K|
|K|cS,K
using the generalized Friedrichs inequality (2.2) and the definition (2.4) of ||| · |||K .
For the second estimate, we have
kϕK k2σ = |σ |ϕK2 ≤
|σ |
|σ |
kϕ k2K ≤
|||ϕ |||2K ,
|K|
|K|cw,r,K
using the definition of ||| · |||K by (2.4).
⊓
⊔
References
1. Aavatsmark, I., Barkve, T., Bøe, Ø., Mannseth, T.: Discretization on unstructured grids for
inhomogeneous, anisotropic media. I. Derivation of the methods. SIAM J. Sci. Comput.
19(5), 1700–1716 (1998)
2. Achdou, Y., Bernardi, C., Coquel, F.: A priori and a posteriori analysis of finite volume
discretizations of Darcy’s equations. Numer. Math. 96(1), 17–42 (2003)
3. Adams, R.A.: Sobolev spaces. Academic Press [A subsidiary of Harcourt Brace Jovanovich,
Publishers], New York-London (1975). Pure and Applied Mathematics, Vol. 65
4. Afif, M., Bergam, A., Mghazli, Z., Verfürth, R.: A posteriori estimators for the finite volume discretization of an elliptic problem. Numer. Algorithms 34(2-4), 127–136 (2003).
International Conference on Numerical Algorithms, Vol. II (Marrakesh, 2001)
5. Agouzal, A., Baranger, J., Maı̂tre, J.F., Oudin, F.: Connection between finite volume and
mixed finite element methods for a diffusion problem with nonconstant coefficients. Application to a convection diffusion problem. East-West J. Numer. Math. 3(4), 237–254 (1995)
6. Agouzal, A., Oudin, F.: A posteriori error estimator for finite volume methods. Appl. Math.
Comput. 110(2-3), 239–250 (2000)
7. Ainsworth, M.: Robust a posteriori error estimation for nonconforming finite element approximation. SIAM J. Numer. Anal. 42(6), 2320–2341 (2005)
Residual flux-based a posteriori error estimates for finite volumes
35
8. Angermann, L.: Balanced a posteriori error estimates for finite-volume type discretizations
of convection-dominated elliptic problems. Computing 55(4), 305–323 (1995)
9. Angermann, L., Knabner, P., Thiele, K.: An error estimator for a finite volume discretization
of density driven flow in porous media. In: Proceedings of the International Centre for
Mathematical Sciences Conference on Grid Adaptation in Computational PDEs: Theory
and Applications (Edinburgh, 1996), vol. 26, pp. 179–191 (1998)
10. Arbogast, T., Dawson, C.N., Keenan, P.T., Wheeler, M.F., Yotov, I.: Enhanced cell-centered
finite differences for elliptic equations on general geometry. SIAM J. Sci. Comput. 19(2),
404–425 (1998)
11. Bank, R.E., Weiser, A.: Some a posteriori error estimators for elliptic partial differential
equations. Math. Comp. 44(170), 283–301 (1985)
12. Bebendorf, M.: A note on the Poincaré inequality for convex domains. Z. Anal. Anwendungen 22(4), 751–756 (2003)
13. Bergam, A., Mghazli, Z., Verfürth, R.: Estimations a posteriori d’un schéma de volumes
finis pour un problème non linéaire. Numer. Math. 95(4), 599–624 (2003)
14. Bernardi, C., Verfürth, R.: Adaptive finite element methods for elliptic equations with nonsmooth coefficients. Numer. Math. 85(4), 579–608 (2000)
15. Brezzi, F., Fortin, M.: Mixed and hybrid finite element methods, Springer Series in Computational Mathematics, vol. 15. Springer-Verlag, New York (1991)
16. Brezzi, F., Lipnikov, K., Shashkov, M.: Convergence of the mimetic finite difference method
for diffusion problems on polyhedral meshes. SIAM J. Numer. Anal. 43(5), 1872–1896
(2005)
17. Burman, E., Ern, A.: Continuous interior penalty hp-finite element methods for advection
and advection-diffusion equations. Math. Comp. 76(259), 1119–1140 (2007)
18. Carstensen, C., Lazarov, R., Tomov, S.: Explicit and averaging a posteriori error estimates
for adaptive finite volume methods. SIAM J. Numer. Anal. 42(6), 2496–2521 (2005)
19. Cheddadi, I., Fučı́k, R., Prieto, M.I., Vohralı́k, M.: Guaranteed and robust a posteriori error
estimates for singularly perturbed reaction–diffusion problems (2008). Preprint R08018,
Laboratoire Jacques-Louis Lions, submitted for publication
20. Chénier, E., Eymard, R., Nicolas, X.: A finite volume scheme for the transport of radionucleides in porous media. Comput. Geosci. 8(2), 163–172 (2004). Simulation of Transport
Around a Nuclear Waste Disposal Site: The COUPLEX Test Cases
21. Chou, S.H., Kwak, D.Y., Kim, K.Y.: A general framework for constructing and analyzing
mixed finite volume methods on quadrilateral grids: the overlapping covolume case. SIAM
J. Numer. Anal. 39(4), 1170–1196 (2001)
22. Coudière, Y., Vila, J.P., Villedieu, P.: Convergence rate of a finite volume scheme for a
two-dimensional convection–diffusion problem. M2AN Math. Model. Numer. Anal. 33(3),
493–516 (1999)
23. Domelevo, K., Omnes, P.: A finite volume method for the Laplace equation on almost arbitrary two-dimensional grids. M2AN Math. Model. Numer. Anal. 39(6), 1203–1249 (2005)
24. Droniou, J., Eymard, R.: A mixed finite volume scheme for anisotropic diffusion problems
on any grid. Numer. Math. 105(1), 35–71 (2006)
25. Eigestad, G.T., Klausen, R.A.: On the convergence of the multi-point flux approximation
O-method: numerical experiments for discontinuous permeability. Numer. Methods Partial
Differential Equations 21(6), 1079–1098 (2005)
26. El Alaoui, L., Ern, A., Burman, E.: A priori and a posteriori analysis of non-conforming
finite elements with face penalty for advection-diffusion equations. IMA J. Numer. Anal.
27(1), 151–171 (2007)
27. Ern, A., Stephansen, A.F., Vohralı́k, M.: Guaranteed and robust a posteriori error estimation
based on flux reconstruction for discontinuous Galerkin methods (2007). Preprint R07050,
Laboratoire Jacques-Louis Lions, submitted for publication
28. Eymard, R., Gallouët, T., Herbin, R.: Finite volume methods. In: Handbook of Numerical
Analysis, Vol. VII, pp. 713–1020. North-Holland, Amsterdam (2000)
29. Eymard, R., Gallouët, T., Herbin, R.: Finite volume approximation of elliptic problems and
convergence of an approximate gradient. Appl. Numer. Math. 37(1-2), 31–53 (2001)
30. Eymard, R., Gallouët, T., Herbin, R.: A cell-centred finite-volume approximation for
anisotropic diffusion operators on unstructured meshes in any space dimension. IMA J.
Numer. Anal. 26(2), 326–353 (2006)
31. Eymard, R., Gallouët, T., Herbin, R.: A new finite volume scheme for anisotropic diffusion
problems on general grids: convergence analysis. C. R. Math. Acad. Sci. Paris 344(6),
403–406 (2007)
36
Martin Vohralı́k
32. Eymard, R., Hilhorst, D., Vohralı́k, M.: A combined finite volume–nonconforming/mixedhybrid finite element scheme for degenerate parabolic problems. Numer. Math. 105(1),
73–131 (2006)
33. Faille, I.: A control volume method to solve an elliptic equation on a two-dimensional irregular mesh. Comput. Methods Appl. Mech. Engrg. 100(2), 275–290 (1992)
34. Karakashian, O.A., Pascal, F.: A posteriori error estimates for a discontinuous Galerkin
approximation of second-order elliptic problems. SIAM J. Numer. Anal. 41(6), 2374–2399
(2003)
35. Kim, K.Y.: A posteriori error analysis for locally conservative mixed methods. Math. Comp.
76(257), 43–66 (2007)
36. Lazarov, R., Tomov, S.: A posteriori error estimates for finite volume element approximations of convection–diffusion–reaction equations. Comput. Geosci. 6(3-4), 483–503 (2002).
Locally conservative numerical methods for flow in porous media
37. Nicaise, S.: A posteriori error estimations of some cell-centered finite volume methods.
SIAM J. Numer. Anal. 43(4), 1481–1503 (2005)
38. Nicaise, S.: A posteriori error estimations of some cell centered finite volume methods for
diffusion-convection-reaction problems. SIAM J. Numer. Anal. 44(3), 949–978 (2006)
39. Ohlberger, M.: A posteriori error estimate for finite volume approximations to singularly
perturbed nonlinear convection–diffusion equations. Numer. Math. 87(4), 737–761 (2001)
40. Ohlberger, M.: A posteriori error estimates for vertex centered finite volume approximations
of convection–diffusion–reaction equations. M2AN Math. Model. Numer. Anal. 35(2),
355–387 (2001)
41. Payne, L.E., Weinberger, H.F.: An optimal Poincaré inequality for convex domains. Arch.
Rational Mech. Anal. 5, 286–292 (1960) (1960)
42. Rivière, B., Wheeler, M.F., Banas, K.: Part II. Discontinuous Galerkin method applied to
single phase flow in porous media. Comput. Geosci. 4(4), 337–349 (2000)
43. Roberts, J.E., Thomas, J.M.: Mixed and hybrid methods. In: Handbook of Numerical Analysis, Vol. II, pp. 523–639. North-Holland, Amsterdam (1991)
44. Shewchuk, J.R.: Triangle: engineering a 2d quality mesh generator and Delaunay triangulator. In: Applied Computational Geometry: Towards Geometric Engineering, pp. 203–222.
Lecture Notes in Computer Science, Vol. 1148. Springer-Verlag, Berlin (1996)
45. Beirão da Veiga, L.: A residual based error estimator for the mimetic finite difference
method. Numer. Math. 108(3), 387–406 (2008)
46. Verfürth, R.: A review of a posteriori error estimation and adaptive mesh-refinement techniques. Teubner-Wiley, Stuttgart (1996)
47. Verfürth, R.: A posteriori error estimators for convection–diffusion equations. Numer. Math.
80(4), 641–663 (1998)
48. Verfürth, R.: Robust a posteriori error estimates for stationary convection-diffusion equations. SIAM J. Numer. Anal. 43(4), 1766–1782 (2005)
49. Vohralı́k, M.: On the discrete Poincaré–Friedrichs inequalities for nonconforming approximations of the Sobolev space H 1 . Numer. Funct. Anal. Optim. 26(7–8), 925–952 (2005)
50. Vohralı́k, M.: Equivalence between lowest-order mixed finite element and multi-point finite
volume methods on simplicial meshes. M2AN Math. Model. Numer. Anal. 40(2), 367–391
(2006)
51. Vohralı́k, M.: A posteriori error estimates for finite volume and mixed finite element discretizations of convection–diffusion–reaction equations. ESAIM Proc. 18, 57–69 (2007)
52. Vohralı́k, M.: A posteriori error estimates for lowest-order mixed finite element discretizations of convection-diffusion-reaction equations. SIAM J. Numer. Anal. 45(4), 1570–1599
(2007)
53. Vohralı́k, M.: Guaranteed and fully robust a posteriori error estimates for conforming discretizations of diffusion problems with discontinuous coefficients (2008). Preprint R08009,
Laboratoire Jacques-Louis Lions, submitted for publication
54. Vohralı́k, M.: Two types of guaranteed (and robust) a posteriori estimates for finite volume
methods. In: Finite Volumes for Complex Applications V, pp. 649–656. ISTE and John
Wiley & Sons, London, UK and Hoboken, USA (2008)
55. Vohralı́k, M.: Unified primal formulation-based a priori and a posteriori error analysis of
mixed finite element methods (2008). Preprint R08036, Laboratoire Jacques-Louis Lions,
submitted for publication
56. Younès, A., Ackerer, P., Chavent, G.: From mixed finite elements to finite volumes for
elliptic PDEs in two and three dimensions. Internat. J. Numer. Methods Engrg. 59(3), 365–
388 (2004)