Bode Plots - Department of Mechanical Engineering
advertisement

Bode Plots
Rajesh Rajamani
ME 4231
Department of Mechanical Engineering
University Of Minnesota
TRANSFER FUNCTIONS
In the case of a single-input single-output (SISO) LTI
system, the relation between the input and output in
the s-domain can be represented by a rational function
called a transfer function
Example
Spring-mass-damper system
G(s)
X ( s)
1
2
F ( s ) ms cs k
1
TRANSFER FUNCTIONS
F
mx cx kx F
x
m
k
Input: F
Output: x
c
G(s)
X ( s)
1
2
F ( s ) ms cs k
Example
Spring-mass-damper system
FREQUENCY RESPONSE
Assume the transfer function G(s) is
asymptotically stable
y (t ) A sin(t )
x(t ) sin(t )
G (s )
A?
?
Answer
A | G ( j ) |
G ( j )
2
COMPLEX NUMBERS
Every complex number has a magnitude and phase
z a bj
Im
| z | a 2 b 2
1 b
*
z tan
a
z
b
Re
a
FREQUENCY RESPONSE
F
G(s)
x
X ( s)
1
2
F ( s ) ms cs k
Input: F sin(t )
m
Output:
k
x | G ( j ) | sin t G ( j )
c
G ( j )
1
m 2 cj k
{
| G ( j ) |
1
k m c
2 2
2
2
c
G ( j ) tan 1
k m 2
3
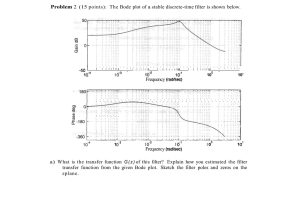
UNDERSTANDING BODE PLOTS
Bode plot of spring-mass-damper system:
Plot | G ( j ) | and G ( j ) as a function of
-3
10
*
magnitude
-4
10
*
-5
10
*
-6
10
-2
-1
10
10
0
1
10
10
frequency (Hz)
UNDERSTANDING BODE PLOTS
-4
y
2
x 10
0
-2
0
5
10
time (sec)
15
20
4
BODE PLOTS
G ( s)
1
s
G(s) s
1
G ( j ) tan 1 ( / 0) 90o
| G ( j ) |
| G ( j ) |
G ( j ) 90 o
BODE PLOTS
The magnitude plot of
G ( s)
1
s
has a slope of - 20 dB/dec
When changes by a factor of 10, | G ( j ) | changes by a
factor of 10
| G ( j ) |
1
1
j
| G ( j1) | 1
| G ( j10) |
1
0.1
10
20 log | G ( j 2 ) | 20 log | G ( j1 ) |
G ( j 2 )
1
20 log |
| 20 log 20
G ( j1 )
10
5
BODE PLOTS
Relative degree of transfer function
= order of denominator - order of numerator
1
s
Relative degree = 1
Transfer function rolls off at - 20 dB/dec
1
Ts 1
Relative degree = 1
Transfer function rolls off at - 20 dB/dec
G ( s)
G (s)
G ( s)
n2
s 2 2 n s n 2
Relative degree = 2
Transfer function rolls off at - 40 dB/dec
BODE PLOTS
G (s)
1
Ts 1
| G ( j ) |
1
T 2 2 1
G ( j )
tan 1 (T )
6
BODE PLOTS
G ( s ) Ts 1
| G ( j ) | T 2 2 1
G ( j ) tan 1 (T )
BODE PLOTS
G ( s)
| G ( j ) |
n2
s 2 2 n s n 2
n 2
2
n
2
G ( j ) tan 1 (
2
2
2
n
2 n
n2 2
)
7
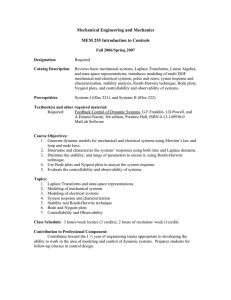
IMPORTANCE OF BODE PLOTS
Experimentally determining the dynamic model for a
system
Design of vibration isolation mounts
Design of sensors
Design of actuators
Signal processing filters
Control system design
Countless other applications …….
VIBRATION ISOLATION
Designing vibration isolation mounts for a machine
F - mean 5000 N and sinusoidal 1000 N at 25Hz
F
x
Machine
m
k
c
Structure
Objective
• Motion of the machine
should be less than 1 mm
from equilibrium
• At 25 Hz, less than 250 N
of force should be
transmitted to the structure
8
VIBRATION ISOLATION
Designing vibration isolation mounts for a machine
Ft cx kx
F
x
Motion of machine
m
G(s)
k
c
X ( s)
1
2
F ( s ) ms cs k
Force transmitted to structure
H ( s)
mx cx kx F
Ft ( s)
cs k
2
F ( s) ms cs k
VIBRATION ISOLATION
Motion of machine
G(s)
F
n2
X ( s)
1
1
2
F ( s ) ms cs k k s 2 2 n s n 2
x
1
10
m
k=16000
k=100,000
k=5,000,000
0
10
-1
10
-2
k
c
10
-3
10
-4
10
mx cx kx F
-5
10
-1
10
0
10
10
1
10
2
9
VIBRATION ISOLATION
5
10
Force Transmitted
4
F ( s)
cs k
H ( s) t
2
F ( s ) ms cs k
c
n 2 s 1
1
k
2
k s 2 n s n 2
k=16000
k=100,000
k=5,000,000
10
3
10
2
10
1
10
0
10
-1
10
0
10
1
10
2
10
VIBRATION ISOLATION
Designing vibration isolation mounts for a machine
Conclusions
F
x
Machine
m
k
c
Structure
• A very hard spring can
restrain motion to be
less than 1 mm
• But a hard spring
increases the high
frequency forces
transmitted to the
structure
10
IMPORTANCE OF BODE PLOTS
Experimentally determining the dynamic model for a
system
Design of vibration isolation mounts
Design of sensors
Design of actuators
Signal processing filters
Control system design
Countless other applications …….
11