Resistance analysis of infinite networks
advertisement

Resistance analysis of infinite networks
Resistance analysis of infinite networks
Erin P. J. Pearse
erin-pearse@uiowa.edu
Joint work with
Palle E. T. Jorgensen
VIGRE Postdoctoral Fellow
Department of Mathematics
University of Iowa
University of Illinois, Urbana-Champaign
April 6, 2009
Resistance analysis of infinite networks
Electrical resistance networks
Networks and functions on networks
Definition (Electrical resistance network (G, c))
A network (G, c) is a simple, connected graph G = {G0 , G1 } with
vertices G0 and edges G1 .
The edges G1 are determined by a weight function called
conductance:
x ∼ y iff 0 < cxy < ∞.
Resistance analysis of infinite networks
Electrical resistance networks
Networks and functions on networks
Definition (Electrical resistance network (G, c))
A network (G, c) is a simple, connected graph G = {G0 , G1 } with
vertices G0 and edges G1 .
The edges G1 are determined by a weight function called
conductance:
x ∼ y iff 0 < cxy < ∞.
0
0
The conductance
P c : G × G → [0, ∞) satisfies
c(x) := y∼x cxy < ∞, for all x ∈ G0 , and
cxy = cyx for all x, y ∈ G0 .
Conductance is the reciprocal of the resistance.
What is the natural way to understand (G, c) as a metric space?
Resistance analysis of infinite networks
Electrical resistance networks
Networks and functions on networks
Examples of electrical resistance networks
Integer lattice with constant conductances: (Zd , 1).
(Homogeneous) trees or other Cayley graphs, with constant
conductances or with
|x| ∧ |y|
cxy = λ
, for some 0 < λ < 1.
Relation to fractals: analysis on PCF fractals is developed as a
renormalized limiting case of ERNs in [Kig], [Str], etc.
Resistance analysis of infinite networks
Electrical resistance networks
The energy form E and the Laplacian ∆
Definition ((Dirichlet)
energy of a function u : G0 → R)
X
E(u) := 21
cxy (u(x) − u(y))2 , dom E = {u ... E(u) < ∞}.
x,y∈G0
cxy = 0 unless x ∼ y; only pairs for which x ∼ y.
“ 21 ” indicates each edge is counted only once.
For f : R → R, the continuous analogue is E(f ) :=
Note: Ker E = {constant functions}.
R
|f 0 |2 dx.
Resistance analysis of infinite networks
Electrical resistance networks
The energy form E and the Laplacian ∆
Definition ((Dirichlet)
energy of a function u : G0 → R)
X
cxy (u(x) − u(y))2 , dom E = {u ... E(u) < ∞}.
E(u) := 21
x,y∈G0
cxy = 0 unless x ∼ y; only pairs for which x ∼ y.
“ 21 ” indicates each edge is counted only once.
Definition (Energy form E on functions u, v ∈ dom E)
P
E(u, v) := 12 x,y∈G0 cxy (u(x) − u(y))(v(x) − v(y))
(Polarization) E(u, v) = 41 [E(u + v) − E(u − v)].
(Markov property) E([u]) ≤ E(u), where [u] is any contraction of u.
Resistance analysis of infinite networks
Electrical resistance networks
The energy form E and the Laplacian ∆
Definition ((Network) Laplacian ∆)
A linear difference operator; weighted average of neighbouring
values.
X
(∆v)(x) :=
cxy (v(x) − v(y)).
y∼x
If the operator c is multiplication by c(x) :=
P
y∼x cxy ,
then
∆ = c − T,
where T is the transfer operator (weighted adjacency matrix)
X
cxy v(y).
(T v)(x) :=
y∼x
Resistance analysis of infinite networks
Effective resistance
Effective resistance on finite networks
Definition (Effective resistance)
The effective resistance R(x, y) is the voltage drop between x and y
when one unit of current is passed from x to y.
Series addition of resistors: R = R1 + R2 .
−1 −1
Parallel addition of resistors: R = (R−1
1 + R2 ) .
Resistance analysis of infinite networks
Effective resistance
Effective resistance on finite networks
Definition (Effective resistance)
The effective resistance R(x, y) is the voltage drop between x and y
when one unit of current is passed from x to y.
Let I be a flow from x to y:
div I = A(δx − δy ), for some A > 0.
If I is induced by v, then (v(x) − v(y))/A is independent of v.
R(x, y) = (v(x) − v(y))/A.
Recall Ohm’s law: V = IR, or R = VI :
Resistance analysis of infinite networks
Effective resistance
Effective resistance on finite networks
Resistance metric sees the topology of the graph
Theorem: Effective resistance R(x, y) is a metric.
For shortest-path metric, dist(a, b) = 4 = dist(x, y).
cxy ≡ 1
a
•
•
x
•
•
•
•
•
•
•
•
•
•
b
•
•
y
Diffusion through the network from x to y is much faster than from
a to b. To see this, attach the electrodes!
Resistance analysis of infinite networks
Effective resistance
Effective resistance on finite networks
Resistance metric sees the topology of the graph
Theorem: Effective resistance R(x, y) is a metric.
For shortest-path metric, dist(a, b) = 4 = dist(x, y).
cxy ≡ 1
a
1
2
/•
1
2
/•
0
•
1
2
•
/•
x
1
2
0
•
1
2
1
2
1
2
•
1
2
/b
1
4
1
4
•
1
4
/•
1
4
1
4
/•
1
4
•
1
2
1
2
/•
/•
/•
1
4
1
2
/y
Points are closer when there are more paths between them:
R(a, b) = 2 > 1 21 = R(x, y).
1
4
1
2
Resistance analysis of infinite networks
Effective resistance
Resistance metrics
Definition (Effective resistance)
The effective resistance R(x, y) is the voltage drop between x and y
when one unit of current is passed from x to y.
R(x, y) = min{v(x) − v(y) ... ∆v = δx − δy }
=
=
min{E(v) ...
min{D(I) ...
(1a)
∆v = δx − δy }
(1b)
div I = δx − δy }
..
.
= (min{E(u) u(x) = 0, u(y) = 1})
(1c)
−1
(1d)
= min{κ ≥ 0 ... |v(x) − v(y)|2 ≤ κE(v)}
(1e)
v(y)|2 ...
(1f)
= max{|v(x) −
E(v) ≤ 1}
P
2
The dissipation of a current is D(I) := e∈G1 c−1
xy I(e) .
The divergence of a current I at x ∈ G0 is div(I)(x) :=
P
y∼x I(x, y).
Resistance analysis of infinite networks
Effective resistance
Resistance metrics
R(x, y) is closely related to ∆ and the random walk
Let Xn be a RW started at x, i.e., X0 = x.
Then the probability of reaching b before a is
v(x)
= P[τb < τa ].
u(x) =
R(a, b)
Here, u, v are the extremizers from
.
R(x, y) = 1/ min{E(u) .. u(x) = 0, u(y) = 1}
.
= min{v(y) − v(x) .. ∆v = δx − δy }
.
= min{E(v) .. ∆v = δx − δy }
.
= min{κ ≥ 0 .. |v(x) − v(y)|2 ≤ κE(v)}
.
= max{|v(x) − v(y)|2 .. E(v) ≤ 1}
Again, the RW has p(x, y) =
cxy
,
c(x)
where c(x) :=
P
y∼x
cxy .
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
Extending resistance metric to infinite networks
For a finite subset H ⊆ G0 containing a, b, define RH (a, b) just as
before, using any of the six formulas, except now extremizing over
u, v : H → R.
Let {Gk }∞
of G:
k=1 be an exhaustion
S
Gk ⊆ Gk+1 , G = Gk , each Gk is finite and connected.
Then define R(x, y) := limk→∞ RGk (x, y).
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
Extending resistance metric to infinite networks
For a finite subset H ⊆ G0 containing a, b, define RH (a, b) just as
before, using any of the six formulas, except now extremizing over
u, v : H → R.
Let {Gk }∞
of G:
k=1 be an exhaustion
S
Gk ⊆ Gk+1 , G = Gk , each Gk is finite and connected.
Then define R(x, y) := limk→∞ RGk (x, y).
PROBLEM: Some of the six formulas still give the right answer,
but others don’t. Example:
min{E(v) ... ∆v = δx − δy } < lim min{E(vk ) ... ∆vk = δx − δy on Gk }
k→∞
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
Extending resistance metric to infinite networks
For a finite subset H ⊆ G0 containing a, b, define RH (a, b) just as
before, using any of the six formulas, except now extremizing over
u, v : H → R.
Let {Gk }∞
of G:
k=1 be an exhaustion
S
Gk ⊆ Gk+1 , G = Gk , each Gk is finite and connected.
Then define RF (x, y) := limk→∞ RGk (x, y).
F is for free.
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
Extending resistance metric to infinite networks
For a finite subset H ⊆ G0 containing a, b, define RH (a, b) just as
before, using any of the six formulas, except now extremizing over
u, v : H → R.
Let {Gk }∞
of G:
k=1 be an exhaustion
S
Gk ⊆ Gk+1 , G = Gk , each Gk is finite and connected.
Then define RF (x, y) := limk→∞ RGk (x, y).
F is for free.
For a finite subset H ⊆ G0 , define H W to be the network obtained
by identifying (“wiring together”)
Xall vertices in G \ H to a new
vertex called ∞ with cx∞ :=
cxy .
y∼x, y∈H
/
Then define RW (x, y) := limk→∞ RGW (x, y).
k
W is for wired.
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
For the exhaustion {GkS
}∞
k=1 :
Gk ⊆ Gk+1 , G = Gk , each Gk is finite and connected.
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
{
Form GW
k by identifying all vertices of Gk to some new vertex ∞.
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
This is electrically equivalent to requiring that all neighbours of
bd Gk have the same potential.
(Hence no current flows through G{k .)
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
Extending resistance metric to infinite networks
Theorem: RF , RW are metrics on (G, c) and RF (x, y) ≥ RW (x, y).
Strict inequality can only happen when dom E contains
nonconstant harmonic functions.
Lemma: Let v, h ∈ dom E. If v is a solution of ∆v = δx − δy and h is
nonconstant and harmonic on G, then E(v) 6= E(v + h).
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
Extending resistance metric to infinite networks
Theorem: RF , RW are metrics on (G, c) and RF (x, y) ≥ RW (x, y).
Strict inequality can only happen when dom E contains
nonconstant harmonic functions.
Lemma: Let v, h ∈ dom E. If v is a solution of ∆v = δx − δy and h is
nonconstant and harmonic on G, then E(v) 6= E(v + h).
Historically, this is the problem of nonuniqueness of currents.
Given some initial
P data
div I = x∈X ξx δx ,
how can you tell when there is a unique current I with this
divergence?
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
The energy space HE
dom E/R1 is a Hilbert space
HE = dom E/R1,
hu, viE := E(u, v).
Fix a reference vertex o ∈ G0 , once and for all.
Define Lx : dom E → R by Lx u := u(x) − u(o).
Lx is continuous on HE , so Lx u = hvx , uiE for some vx ∈ HE .
Theorem: x 7→ vx is an isometric embedding of (G, RF ) into HE :
RF (x, y) = kvx − vy k2E .
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
The energy space HE
dom E/R1 is a Hilbert space
HE = dom E/R1,
hu, viE := E(u, v).
Fix a reference vertex o ∈ G0 , once and for all.
Define Lx : dom E → R by Lx u := u(x) − u(o).
Lx is continuous on HE , so Lx u = hvx , uiE for some vx ∈ HE .
Theorem: x 7→ vx is an isometric embedding of (G, RF ) into HE :
RF (x, y) = kvx − vy k2E .
Definition
vx is a dipole. The collection {vx }x∈G0 is the energy kernel.
Theorem: {vx }x∈G0 is a reproducing kernel:
hvx , uiE = u(x) − u(o) for all u ∈ HE .
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
The structure of HE
dom E/R1 is a Hilbert space
HE = dom E/R1,
hu, viE := E(u, v).
Theorem: HE = Fin ⊕ Harm, where
Harm := {h ∈ HE ... ∆h(x) = 0, ∀x ∈ G0 }, and
Fin := [{f ∈ HE ... f (x) = k, for all but finitely many x ∈ G0 }]E .
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
The structure of HE
dom E/R1 is a Hilbert space
HE = dom E/R1,
hu, viE := E(u, v).
Theorem: HE = Fin ⊕ Harm, where
Harm := {h ∈ HE ... ∆h(x) = 0, ∀x ∈ G0 }, and
Fin := [{f ∈ HE ... f (x) = k, for all but finitely many x ∈ G0 }]E .
Theorem (Discrete
Formula)
X Gauss-Green
X
∂v
hu, viE =
u∆v +
u ∂n
G0
Z
bd G
Z
∇ϕ · ∇ψ dV = −
U
Z
ϕ∆ψ dV +
U
∂U
ϕ ∂∂n ψ dS
Resistance analysis of infinite networks
The Hilbert space formalism
Resistance metric on infinite networks
The structure of HE
dom E/R1 is a Hilbert space
HE = dom E/R1,
hu, viE := E(u, v).
Theorem: HE = Fin ⊕ Harm, where
Harm := {h ∈ HE ... ∆h(x) = 0, ∀x ∈ G0 }, and
Fin := [{f ∈ HE ... f (x) = k, for all but finitely many x ∈ G0 }]E .
Theorem (Discrete
Formula)
X Gauss-Green
X
∂v
hu, viE =
u∆v +
u ∂n
G0
bd G
For v = f + h, with f ∈ Fin, h ∈ Harm, E(v) = E(f ) + E(h)
X
X
kvk2E =
f ∆f +
h ∂∂hn
G0
bd G
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
Theorem (Discrete Gauss-Green)
X
X
u∆v +
For u, v ∈ dom E, hu, viE =
u ∂∂vn .
G0
Let Gk ⊆ Gk+1 , G =
S
bd G
Gk , as before.
bd Gk := {x ∈ Gk ... ∃y ∈ G{k , y ∼ x}
X
∂v
cxy (v(x) − v(y)),
x ∈ bd Gk
∂ n (x) :=
y∈Gk
Think: ∂∂vn (x) = ∆G (x).
k
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
Theorem (Discrete Gauss-Green)
X
X
u∆v +
For u, v ∈ dom E, hu, viE =
u ∂∂vn .
G0
bd G
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
Theorem (Discrete Gauss-Green)
X
X
u∆v +
For u, v ∈ dom E, hu, viE =
u ∂∂vn .
G0
X
bd G
u ∂∂vn := lim
k→∞
bd G
X
x∈bd Gk
u(x) ∂∂vn (x).
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
Theorem (Discrete Gauss-Green)
X
X
u∆v +
For u, v ∈ dom E, hu, viE =
u ∂∂vn .
G0
bd G
Theorem (PJ & EP)
The following are equivalent:
1
HE = Fin = [functions of finite support]E = [span{δx }]E .
2
Harm = 0.
P
∂v
bd G u ∂ n = 0 for all u, v ∈ HE . (I.e., E(u, v) = hu, ∆vi`2 .)
3
Theorem
HE = Fin ⊕ Harm.
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
RF (x, y) = (vx − vy )(x) − (vx − vy )(y)
(2a)
= E(vx − vy )
(2b)
.
= min{D(I) .. div I = δx − δy and I =
.
..
= (min{E(v) v(x) = 1, v(y) = 0})
.
..
−1
P
ξ γ χγ }
+ E(PHarm (vx − vy )) (2d)
2
= inf{κ ≥ 0 |v(x) − v(y)| ≤ κE(v), ∀v ∈ dom E}
= sup{|v(x) −
.
v(y)|2 ..
(2c)
E(v) ≤ 1, ∀v ∈ dom E}
(2e)
(2f)
.
(3a)
= min{E(v) ∆v = δx − δy , v ∈ dom E}
(3b)
RW (x, y) = min{v(x) − v(y) .. ∆v = δx − δy , v ∈ dom E}
.
..
= min{D(I)
.
..
div I = δx − δy }
.
..
= (min{E(v) v(x) = 1, v(y) = 0})
.
..
(3c)
−1
2
= inf{κ ≥ 0 |v(x) − v(y)| ≤ κE(v), ∀v ∈ Fin}
= sup{|v(x) −
.
v(y)|2 ..
E(v) ≤ 1, ∀v ∈ Fin}
(3d)
(3e)
(3f)
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
RF vs. RW in terms of boundary conditions on ∆
RF (x, y)(= u(x) − u(y) where u is the limit of the solutions to
∆u = δx − δy , on Gk ,
∂u
on G \ Gk ,
∂ n = 0,
RW (x, y)
(= u(x) − u(y) where u is the limit of the solution to
∆u = δx − δy , on Gk ,
u = const,
on G \ Gk .
F
HE ={u ∈ dom E ... u(x) − u(y) = 0 unless x, y ∈ H}
H
W
and HE = {u ∈ HE ... spt u ⊆ H}
H
Both are spaces of functions which have no energy outside of H.
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
Shortcuts through ∞
RF (x, y) = min{D(I) ... div I = δx − δy and I =
RW (x, y) = min{D(I) ... div I = δx − δy }
P
ξγ χγ }
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
Shortcuts through ∞
RF (x, y) = min{D(I) ... div I = δx − δy and I =
RW (x, y) = min{D(I) ... div I = δx − δy }
P
ξγ χγ }
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
Shortcuts through ∞
RF (x, y) = min{D(I) ... div I = δx − δy and I =
RW (x, y) = min{D(I) ... div I = δx − δy }
Note that some current “paths” pass through ∞.
P
ξγ χγ }
Resistance analysis of infinite networks
The Hilbert space formalism
The discrete Gauss-Green formula
A nontrivial harmonic function in dom E
Let cxy = 1. Then E(h) = 1 and limn→±∞ h(xn ) = ±1.
Intuition: Harm 6= 0 means the network “grows fast”.
| bd S|
More precisely, (G, c) is an expander: inf
> 0.
|S|<∞ |S|
Resistance analysis of infinite networks
Boundary representation
Theorem (Discrete Gauss-Green
formula)
X
X
u∆v +
u ∂∂vn .
For u, v ∈ dom E, hu, viE =
G0
bd G
Corollary (Boundary sum representation for harmonic functions)
For u ∈ Harm, and hx = PHarm vx ,
X
x
u(x) =
u ∂h
∂ n + u(o).
bd G
Proof. Let v = hx . Then hu, hx iE = u(x) − u(o).
Recall:
kvk2E =
X
G0
f ∆f +
X
bd G
h ∂∂hn
Resistance analysis of infinite networks
Boundary representation
Theorem (Discrete Gauss-Green
formula)
X
X
u∆v +
u ∂∂vn .
For u, v ∈ dom E, hu, viE =
G0
bd G
Corollary (Boundary sum representation for harmonic functions)
For u ∈ Harm, and hx = PHarm vx ,
X
x
u(x) =
u ∂h
∂ n + u(o).
bd G
Recall the Poisson kernel k : Ω × ∂Ω → R from which
R
u(x) = ∂Ω u(y)k(x, dy),
y ∈ ∂Ω,
for any bounded harmonic function u.
Fatou-Primalov: a bounded harmonic function can be extended to
the boundary almost everywhere. (So u(y) makes sense a.e.)
Resistance analysis of infinite networks
Boundary representation
u(x) =
X
x
u ∂h
∂ n + u(o)
Z
7→
u(y)k(x, dy), y ∈ ∂Ω.
u(x) =
bd G
∂Ω
Goals:
A measure space bd G and a measure P on it.
An extension of u, hx ∈ Harm to elements ξ ∈ bd G.
A kernel k(x, dξ) := hx (ξ)dP(ξ) on G0 × bd G.
Z
An integral representation u(x) =
u(ξ)k(x, dξ) + u(o).
bd G
A concrete realization of ξ ∈ bd G.
Resistance analysis of infinite networks
Boundary representation
Problem: HE is too small to support P.
Theorem (Nelson): If µ is a σ-finite measure on a Hilbert space H,
then µH = 0.
Resistance analysis of infinite networks
Boundary representation
Problem: HE is too small to support P.
Theorem (Nelson): If µ is a σ-finite measure on a Hilbert space H,
then µH = 0.
Solution: construct a Gel’fand triple for HE .
S ⊆ HE ⊆ S 0 .
S is dense in HE with respect to E.
S has another, strictly finer, “test function” topology.
S 0 is the dual of S with respect to the test function topology.
Think: S = {test functions} and S 0 = {distributions}.
The boundary will be some suitable subspace of S 0 .
Resistance analysis of infinite networks
Boundary representation
The space of test functions (“of rapid decay”)
Definition
Let V = span{vx } be the finite linear combinations of dipoles.
∗ V denote any self-adjoint extension of the (graph) closure of
Let ∆
the Laplacian when taken to have this dense domain.
Resistance analysis of infinite networks
Boundary representation
The space of test functions (“of rapid decay”)
Definition
Let V = span{vx } be the finite linear combinations of dipoles.
∗ V denote any self-adjoint extension of the (graph) closure of
Let ∆
the Laplacian when taken to have this dense domain.
Definition
T∞
p
∞ ) :=
∗
∗ ).
Define S := dom(∆
V
V
p=1 dom(∆
p
∗ ukE .
S is a Fréchet space with seminorms kukp := k∆
V
Resistance analysis of infinite networks
Boundary representation
A Gel’fand triple for HE
Theorem. S ⊆ HE ⊆ S 0 is a Gel’fand triple.
The energy form extends to a pairing on S × S 0 defined by
p
−p
∗ u, ∆
∗
hu, ξiW = h∆
V
V ξiE = limn→∞ ξ(En u).
−p
th
∗
Note: ∆
V ξ is the p primitive (“antiderivative”) of ξ,
∗ V.
nothing to do with the inverse of ∆
p
∗ ukE ,
ξ ∈ S 0 ⇐⇒ |ξ(u)| ≤ Ck∆
V
.
p
p
∗ u) := hu, ξi is continuous on span{∆
∗ u .. u ∈ HE }.
so ϕ(∆
V
V
Resistance analysis of infinite networks
Boundary representation
A Gel’fand triple for HE
Theorem. S ⊆ HE ⊆ S 0 is a Gel’fand triple.
The energy form extends to a pairing on S × S 0 defined by
p
−p
∗ u, ∆
∗
hu, ξiW = h∆
V
V ξiE = limn→∞ ξ(En u).
−p
th
∗
Note: ∆
V ξ is the p primitive (“antiderivative”) of ξ,
∗ V.
nothing to do with the inverse of ∆
Note: En u is the
R n spectral truncation of u.
En u := 1/n E(dλ)u.
En u ∈ S because R
n
p
2
2p
2
2p
2
∗ En uk ≤
k∆
V
E
1/n λ kE(dλ)ukE ≤ n kukE .
Theorem. S is a dense analytic subspace of HE (w.r. E).
Resistance analysis of infinite networks
Boundary representation
A Gel’fand triple for HE : S ⊆ HE ⊆ S 0
What to do with a Gel’fand triple?
Minlos: {pos. def. fns on S } ↔ {Radon prob. meas. on S 0 }.
1
2
RF (x, y) = kvx − vy k2E is negative semidefinite, so e− 2 ku−vkE is
positive definite on HE × HE . (Bochner)
Now we have HE ⊆ S 0 and L2 (S 0 , P) to work with.
Resistance analysis of infinite networks
Boundary representation
A Gel’fand triple for HE : S ⊆ HE ⊆ S 0
What to do with a Gel’fand triple?
Minlos: {pos. def. fns on S } ↔ {Radon prob. meas. on S 0 }.
1
2
RF (x, y) = kvx − vy k2E is negative semidefinite, so e− 2 ku−vkE is
positive definite on HE × HE . (Bochner)
Now we have HE ⊆ S 0 and L2 (S 0 , P) to work with.
The Wiener transform W : vx 7→ hvx , ·iW is an isometric embedding
of HE into L2 (S 0R, P):
hu, viE = S 0 ũṽ dP, ũ(ξ) := hu, ξiW .
Resistance analysis of infinite networks
Boundary representation
A Gel’fand triple for HE : S ⊆ HE ⊆ S 0
What to do with a Gel’fand triple?
Minlos: {pos. def. fns on S } ↔ {Radon prob. meas. on S 0 }.
1
2
RF (x, y) = kvx − vy k2E is negative semidefinite, so e− 2 ku−vkE is
positive definite on HE × HE . (Bochner)
Now we have HE ⊆ S 0 and L2 (S 0 , P) to work with.
The Wiener transform W : vx 7→ hvx , ·iW is an isometric embedding
of HE into L2 (S 0R, P):
hu, viE = S 0 uv dP, u(ξ) := hu, ξiW .
Resistance analysis of infinite networks
Boundary representation
Boundary integral representation of u ∈ Harm
Theorem. For u ∈ Harm
Z and hx = PHarm vx ,
u(x) =
S0
u(ξ)hx (ξ) dP(ξ) + u(o).
R
Substitute u ∈ Harm and
R v = vx into hu, viE = S 0 uv dP:
hvx , uiE = S 0 uvx dP = u(x) − u(o).
Resistance analysis of infinite networks
Boundary representation
Boundary integral representation of u ∈ Harm
Theorem. For u ∈ Harm
Z and hx = PHarm vx ,
u(x) =
S0
Compare to u(x) =
X
u(ξ)hx (ξ) dP(ξ) + u(o).
x
u ∂h
∂n
Z
+ u(o) =
bd G
bd G
u(ξ)k(x, dξ).
Goals:
A measure space bd G and a measure P on it.
An extension of u, hx ∈ Harm to elements ξ ∈ bd G.
A kernel k(x, dξ) on G0 × bd G.
An integral representation u(x) =
R
A concrete realization of ξ ∈ bd G.
bd G u(ξ)
k(x, dξ) + u(o).
Resistance analysis of infinite networks
Boundary representation
The kernel k(x, dP)
Since u(x) =
R
A problem:
R
One expects
R
uhx dP + u(o), the obvious choice is hx dP.
R
S 0 k(x, dξ) = S 0 1hx dP = 0.
S0
S0
k(x, dξ) = 1.
Resistance analysis of infinite networks
Boundary representation
The kernel k(x, dP)
From the Wiener isometry:
∞
M
L2 (S 0 , P) =
H⊗n = C1 ⊕ H ⊕ H2 ⊕ . . . .
n=0
H = W(HE )
H⊗0 := C1 for a unit “vacuum” vector 1.
H⊗n is the n-fold symmetric tensor product of H with itself.
Resistance analysis of infinite networks
Boundary representation
The kernel k(x, dP)
From the Wiener isometry:
∞
M
L2 (S 0 , P) =
H⊗n = C1 ⊕ H ⊕ H2 ⊕ . . . .
n=0
H = W(HE )
H⊗0 := C1 for a unit “vacuum” vector 1.
H⊗n is the n-fold symmetric tensor product of H with itself.
u 7→ hu, ·i ∈ H1 , (u, v) 7→ hu, ·ihv, ·i ∈ H2 , etc.
Observe that 1 is orthogonal to Fin and Harm, but is not the zero
element of L2 (SG0 , P).
Resistance analysis of infinite networks
Boundary representation
The kernel k(x, dP) = (1 + hx )dP
R
R
R
Now S 0 k(x, dP) = S 0 1 dP + S 0 hx dP = 1.
It follows that hx ≥ −1 P-a.e. on S 0 .
kx = 1 + h .
Also, k(x, ·) P with Radon-Nikodym derivative ddP
x
k(x, dP) = (1 + hx )dP is supported on G0 × S 0 /Fin:
Let f ∈ Fin. Since hx is harmonic,
Z
Z
f k(x, dP) =
(1 + hx )f dP
SG0
SG0
Z
=
SG0
Z
1f P +
= 0 + hhx , f iE
= 0.
SG0
hx f dP
Resistance analysis of infinite networks
Boundary representation
The boundary bd G
A path is a sequence of vertices γ = (x0 , x1 , . . . ) with xi ∼ xi−1 .
Define γ ' γ 0 iff limn→∞ (h(γn ) − h(γn0 )) = 0 for every h ∈ Harm.
Resistance analysis of infinite networks
Boundary representation
The boundary bd G
A path is a sequence of vertices γ = (x0 , x1 , . . . ) with xi ∼ xi−1 .
Define γ ' γ 0 iff limn→∞ (h(γn ) − h(γn0 )) = 0 for every h ∈ Harm.
Let β = [γ] be such an equivalence class. Define
νγ := limn→∞ k(xn , dP).
Resistance analysis of infinite networks
Boundary representation
The boundary bd G
A path is a sequence of vertices γ = (x0 , x1 , . . . ) with xi ∼ xi−1 .
Define γ ' γ 0 iff limn→∞ (h(γn ) − h(γn0 )) = 0 for every h ∈ Harm.
Let β = [γ] be such an equivalence class. Define
νγ := limn→∞ k(xn , dP).
Alaoglu’s theorem
Z gives a weak-? limit, so for
Z any u ∈ Harm,
u(xn ) =
n→∞
S 0 /Fin
u(1 + hx ) dP −−−−−→
S 0 /Fin
u dνγ := u(β).
So bd G is the set of all equivalence classes of infinite paths in G,
under this equivalence relation.
Resistance analysis of infinite networks
Boundary representation
The boundary bd G
Compare
R k(xn , dP) to an approximate identity in Fourier analysis:
(xn , dP) = 1 for each n, and
S 0 /Fin kR
limn→∞ S 0 /Fin k(xn , dP) is a Dirac mass (at β).
Resistance analysis of infinite networks
Boundary representation
The boundary bd G
Compare
R k(xn , dP) to an approximate identity in Fourier analysis:
(xn , dP) = 1 for each n, and
S 0 /Fin kR
limn→∞ S 0 /Fin k(xn , dP) is a Dirac mass (at β).
Intuition: on any finite subset Gk , define a probability measure µx
on bd Gk by
µx (y) := Px [Xτbd Gk = y], for all y ∈ bd Gk .
Resistance analysis of infinite networks
Boundary representation
The boundary bd G
Compare
R k(xn , dP) to an approximate identity in Fourier analysis:
(xn , dP) = 1 for each n, and
S 0 /Fin kR
limn→∞ S 0 /Fin k(xn , dP) is a Dirac mass (at β).
Intuition: on any finite subset Gk , define a probability measure µx
on bd Gk by
µx (y) := Px [Xτbd Gk = y], for all y ∈ bd Gk .
Consider Brownian motion on a disk with such an exit measure.
Resistance analysis of infinite networks
Boundary representation
Resistance analysis of infinite networks
Erin P. J. Pearse
erin-pearse@uiowa.edu
Joint work with
Palle E. T. Jorgensen
VIGRE Postdoctoral Fellow
Department of Mathematics
University of Iowa
University of Illinois, Urbana-Champaign
April 6, 2009
Resistance analysis of infinite networks
Supporting material
Probability and the Laplace operator
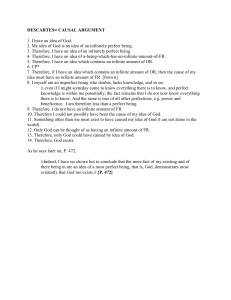
Approximating the reproducing kernels on the tree
1
1
1
1
1
x
v(k)
x
0
2k − 1
2k+2 − 2 x
(k)
fx
1
2
0
2k-j − 1
2k+2 − 2
0
0
j = 0,1, ... , k
2k-1 − 1
2k+2 − 2
2k − 1
2k+2 − 2
0
0
0
1
2k-j − 1
2k+2 − 2
1
x
j = 0,1, ... , k
1
k
1− 22k+2−−12
1−
2k-1 − 1
2k+2 − 2
1−
2k-j − 1
2k+2 − 2
1
j = 0,1, ... , k
1
2
(k)
hx
2k − 1
2k+2 − 2
2k-j − 1
2k+2 − 2
j = 0,1, ... , k
0
y
0
Resistance analysis of infinite networks
Supporting material
Probability and the Laplace operator
Definition ((Network) Laplacian ∆)
A linear difference operator; weighted average of neighbouring
values.
X
(∆v)(x) :=
cxy (v(x) − v(y)).
y∼x
If the operator c is multiplication by c(x) :=
P
y∼x cxy ,
then
∆ = c − T,
where T is the transfer operator (weighted adjacency matrix).
Resistance analysis of infinite networks
Supporting material
Probability and the Laplace operator
Definition ((Network) Laplacian ∆)
A linear difference operator; weighted average of neighbouring
values.
X
(∆v)(x) :=
cxy (v(x) − v(y)).
y∼x
If the operator c is multiplication by c(x) :=
P
y∼x cxy ,
then
∆ = c − T,
where T is the transfer operator (weighted adjacency matrix).
∆p = 1 − c−1 T is the “probabilistic Laplacian”.
P := c−1 T gives transitions with probabilities p(x, y) =
cxy
c(x) .
Resistance analysis of infinite networks
Supporting material
Probability and the Laplace operator
Laplacian and random walk
∆p = 1 − c−1 T is the “Probabilistic Laplacian”.
P := c−1 T gives transitions with probabilities p(x, y) =
cxy
c(x) .
Let µ be a probability measure on G0 giving the initial distribution
of a random walker.
Then: µP gives the distribution of the walker after 1 step, and
µPn gives the distribution after n steps.
To start a random walk at x ∈ G0 , let µ = δx .
Resistance analysis of infinite networks
Supporting material
Probability and the Laplace operator
Laplacian and random walk
∆p = 1 − c−1 T is the “Probabilistic Laplacian”.
P := c−1 T gives transitions with probabilities p(x, y) =
cxy
c(x) .
Let µ be a probability measure on G0 giving the initial distribution
of a random walker.
Then: µP gives the distribution of the walker after 1 step, and
µPn gives the distribution after n steps.
To start a random walk at x ∈ G0 , let µ = δx .
Similarly, let u be a function on G0 .
Then: Pu gives the expected value of u after 1 step, and
Pn u gives the expected value of u after n steps.
Resistance analysis of infinite networks
Supporting material
Probability and the Laplace operator
Laplacian and random walk
Definition (Harmonic function)
h is harmonic on F ⊆ G0 iff ∆h(x) = 0 for each x ∈ G0 .
Definition (Dirichlet problem)
Designate B ⊆ G0 as a “boundary”.
Given g : B → R, find h so hB = g and ∆h(x) = 0 for x ∈ G0 \ B.
Theorem (Doob)
The solution is given by h(x) = E(g(Xτb )), where
Xn is the location of the random walker at time n, and
τB := min{n ... Xn ∈ B}.
τB is called the hitting time of B.
Resistance analysis of infinite networks
Supporting material
The trace resistance
Trace and Schur complement
For a finite subset H ⊆ G0 , write the Laplacian of G in block form
with H appearing first:
H
A BT
.
∆=
B D
H
{
The Schur complement is ∆H := A − BT D−1 B.
Resistance analysis of infinite networks
Supporting material
The trace resistance
Trace and Schur complement
For a finite subset H ⊆ G0 , write the Laplacian of G in block form
with H appearing first:
H
A BT
.
∆=
B D
H
{
The Schur complement is ∆H := A − BT D−1 B.
∆H defines a subnetwork called the trace of G to H.
The trace H S has the same vertices as H and edges given by
{
cH
xy = cxy + c(x)P[x → y | H ].
P[x → y | H { ] is the probability that the RW started at x makes it to y without
passing through H.
Resistance analysis of infinite networks
Supporting material
The trace resistance
Trace and Schur complement
The trace resistance is then defined to be
RS (x, y) := lim RGS (x, y),
k→∞
k
where {Gk } is any exhaustion of G.
Theorem: Let H 0 = {x, y} be any two vertices of G. Then the trace
resistance can be computed via
1
1 −1
= A − BT D−1 B.
∆H = S
1
R (x, y) −1
Resistance analysis of infinite networks
Supporting material
The trace resistance
Trace and Schur complement
The trace resistance is then defined to be
RS (x, y) := lim RGS (x, y),
k→∞
k
where {Gk } is any exhaustion of G.
Theorem: Let H 0 = {x, y} be any two vertices of G. Then the trace
resistance can be computed via
1
1 −1
= A − BT D−1 B.
∆H = S
1
R (x, y) −1
Theorem: The trace resistance RS (x, y) is given by
1
RS (x, y) =
.
c(x)P[x → y]
Resistance analysis of infinite networks
Supporting material
The trace resistance
Trace and Schur complement
The trace resistance is then defined to be
RS (x, y) := lim RGS (x, y),
k→∞
where {Gk } is any exhaustion of G.
Theorem: RS (x, y) = RGS (x, y) for all k.
k
k
Resistance analysis of infinite networks
Supporting material
The trace resistance
Trace and Schur complement
The trace resistance is then defined to be
RS (x, y) := lim RGS (x, y),
k→∞
k
where {Gk } is any exhaustion of G.
Theorem: RS (x, y) = RGS (x, y) for all k.
k
Theorem: RGk (x, y) decreases monotonically to RS (x, y).
Therefore, RF (x, y) = RS (x, y).
Resistance analysis of infinite networks
Supporting material
The trace resistance
Trace and Schur complement
The trace resistance is then defined to be
RS (x, y) := lim RGS (x, y),
k→∞
k
where {Gk } is any exhaustion of G.
Theorem: RGk (x, y) decreases monotonically to RS (x, y).
Therefore, RF (x, y) = RS (x, y).
Compare:
1
1
P
=
.
c(x)P[x → y]
c(x) γ∈Γ(x,y) P(γ)
P
RF (x, y) = min{D(I) ... div I = δx − δy and I =
ξγ χγ }.
RF (x, y) =
P(γ) = P(x0 , x1 , . . . ) :=
Q∞
n=1
p(xn−1 , xn )
Resistance analysis of infinite networks
Supporting material
The trace resistance
Why the Schur complement works
∆=
H
H{
A BT
B D
=
cA − TA
− TBT
− TBT cB − TD
.
If `(G0 ) := {f : G0 → R}, the corresponding mappings are
A :`(H) → `(H)
B :`(H) → `(H { )
BT : `(H { ) → `(H)
D : `(H { ) → `(H { ).
Resistance analysis of infinite networks
Supporting material
The trace resistance
Why the Schur complement works
∆=
H
H{
A BT
B D
=
cA − TA
− TBT
− TBT cB − TD
.
Since P = c−1 T, the Schur complement is
∆H = (cA − TA ) − (− TBT )(cD − TD )−1 (− TB )
= cA − cA PA − cA PBT (I − PD )−1 c−1
cD PB
! D!
∞
X
= cA − cA PA + PBT
PnD PB .
n=0
Next, consider an entry of the matrix PA + PBT
P∞
n
n=0 PD
PB .
Resistance analysis of infinite networks
Supporting material
The trace resistance
Why the Schur complement works
P∞
The (x, y)th entry of the matrix PA + PBT
PA (x, y)+
∞ X
X
n
n=0 PD
PB :
PBT (x, s)PnD (s, t)PB (t, y)
n=0 s,t
˛
“
˛
= P(c) {γ ∈ Γ(x, y) ˛
= P(c)
∞
[
.
..
H{
˛
˛
{γ ∈ Γ(x, y) ˛
k=1
˛ ”
“
˛
= P(c) Γ(x, y) ˛
H{
˛
˛
= P[x → y] ˛
{
H
∞
˛
” X
“
˛
|γ| = 1} +
P(c) {γ ∈ Γ(x, y) ˛
k=2
!
.
..
H{
|γ| = k}
.
..
H{
|γ| = k}
”