Solutions
advertisement

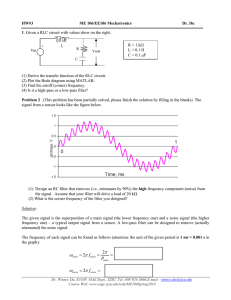
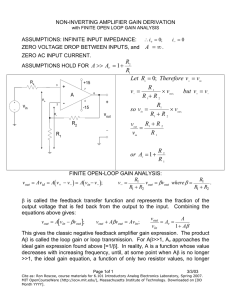
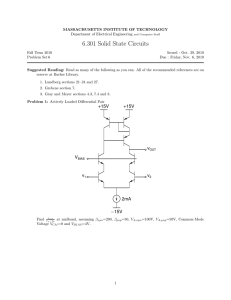
HW#3 Solutions ME 106/EE106 Mechatronics Problem 1 1. (1) Derive the transfer function of the RLC circuit. (2) Plot the bode diagram using MATLAB or Excel. L + R Vin R = 1 k L = 0.1 H C = 0.1 F Vout C Solution: (1) Using voltage division: The transfer function is: Vout (Z R ZC ) Vin Z L (Z R ZC ) TF Vout (Z R ZC ) Vin Z L ( Z R Z C ) 1 ) ( j ) RC 1 1104 ( j ) 1 j C 2 8 2 4 1 j L ( R ) ( j ) LC ( j ) RC 1 110 ( j ) 110 ( j ) 1 j C (R (2) Since TF 1 104 ( j ) 1 1108 ( j ) 2 1104 ( j ) 1 » NUM=[0.0001 1]; » SYS=TF(NUM,DEN); » DEN=[0.00000001 0.0001 1]; » bode(SYS) »grid; Draw the bode diagram, fc is about 1.8104 Hz. -3dB C Dr. Winncy Du, E310F, MAE Dept., SJSU, Tel.:408-924-3866,E-mail: wdu@sjsu.edu Problem 2 (This problem has been partially solved, please finish the solution by filling in the blanks) The signal from a sensor looks like the figure below. (1) Design an RC filter that removes (that is, attenuates by 90%) the high frequency component from the signal below. Assume that your filter will drive a load of 20 k. (2) What is the corner frequency of the filter you designed? Solution: The given signal is the superposition of a main signal (the lower frequency one) and a noise signal (the higher frequency one) – a typical output signal from a sensor. A low-pass filter can be designed to remove (actually attenuated) the noise signal. The frequency of each signal can be found as follows (attention: the unit of the given period is 1 ms = 0.001 s in the graph): main 2 f main noise 2 f noise 2 2 6.283 10 3 (rad/s) Tmain 0.001 2 Tnoise 2 125.664 10 3 (rad/s) 0.001 / 20 To design a RC filter is to choose a proper R and C values so that the useful signal (the lower frequency signal in this case) can pass through, while the noise signal (with the higher frequency) will be attenuated. Assume that we want the noise signal to be attenuates by 90%, that means V out , noise Vin ,noise 1 2 1 noise R 2C 2 0.1 noise RC 99 RC 99 / noise 7.92 10 5 How do we decide what value of R or C should be? One consideration is that we try to keep Vout , main Vin , main close to 1 as possible as we can. That means the main (useful) signal is kept to its original value as possible. In the real practice, we often send the filter output to a device (called “load” here). Assume a load of 20 k is Dr. Winncy Du, E310F, MAE Dept., SJSU, Tel.:408-924-3866,E-mail: wdu@sjsu.edu added to the circuit (see the graph below). To a low frequency input, the capacitor is near to be open (recall the voltage and current relationship of a capacitor). Thus, there is a voltage division between R and RL i.e., R + - RL C Vin Vout Vout RL Vin R RL We don’t want R to get too much voltage because there will be nothing left for the load Vout . That is, we want Vout / Vin is close to 1: RL Vin R RL Vout Vout RL 1 Vin R RL R / RL 1 That means the ratio R / RL must be as small as possible. Usually R / RL < 10% is good enough. Let us take R / RL = 5%, thus (assume a load of 20 k), R 20 k 0.05 1 k Then, the capacitor can be determined by C 7.92 10 5 / R 79.2 F or 0.0792 F (2) The corner frequency can be found by: TF Vout ,noise Vin ,noise 1 1 R C 2 c 2 2 0.707 1 2 Plug in R 1 k and 0.0792 F , we have c or 1 c2 R 2 C 2 2 . 1 12.63 10 3 rad/s RC Note: c can also be found from the bode diagram, as shown below 1 1 Vout 1 = . 5 Vin j RC 1 ( j )7.92 10 1 0.0000792 j 1 The corner frequency in radian, c, is about 12,000 rad/s. Dr. Winncy Du, E310F, MAE Dept., SJSU, Tel.:408-924-3866,E-mail: wdu@sjsu.edu -3dB C Dr. Winncy Du, E310F, MAE Dept., SJSU, Tel.:408-924-3866,E-mail: wdu@sjsu.edu