ALTERNATING CURRENTS
advertisement

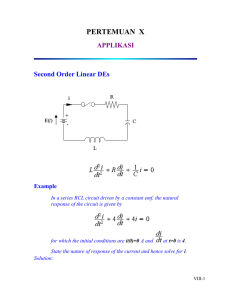
ALTERNATING CURRENTS 1. Alternating Current and Alternating EMF An alternating current is one whose magnitude changes continuously with time between zero and a maximum value and whose direction reverses periodically. The simplest type of alternating current is one which varies with time simple harmonically. It is represented by i i0 sin t …(i) or i i0 cos t, …(ii) where i is the instantaneous value of the current at time t and i0 is the maximum (or peak) value of the current and is called 'current amplitude'. ф is called the 'angular frequency' of alternating current (a.c.) and is given by 2 2f T where T is the 'time period' and f is the frequency of a.c. Eq. (i) and (ii) represent alternating current i as a sine function of time t and as a cosine function of time t respectively. Both representations lead to the same result. Fig. 1 (a) and (b) are graphical representations of i as sine function of t and as cosine function of t respectively. The complete set of variations of the current in one time-period T is called a 'cycle.' The emf (or voltage) which produces alternating current in some circuit is called 'alternating emf' (or voltage). Thus, the emf (or voltage) whose magnitude changes continuously with time between zero and a maximum value and whose direction reverses periodically is known as alternating emf (or voltage). The instantaneous value of alternating emf may be represented by E = E0 sin Өt ...(iii) or E = E0 cos Өt …(iv) The graphical representations of E as sine and cosine functions of t are of the same form as those of i (Fig. la and b). 2. Amplitude, Periodic Time and Frequency of Alternating Current Amplitude : The alternating current varies in magnitude and reverses in direction periodically. The maximum value of the current in either direction is called the 'peak value' or the 'amplitude' of the current. It is represented by i0. Periodic Time : The time taken by the alternating current to complete one cycle of variations is called the 'periodic-time' of the current. If, in eq. (i) or (ii), t be increased by 2 , the value of i remains unchanged. Hence the periodic-time T of the alternating current is given by T= 2 . Frequency : The number of cycles completed by an alternating current in one second is called the 'frequency' of the current. If the periodic-time of the alternating current be T, then its frequency is f= 1 T But T = 2 . f . 2 The unit of frequency is 'cycles/second' (c/s) or hertz (Hz). The frequency of the domestic alternating current is 50 cycles/second or 50 Hz. 3. Mean (or Average) Value and Root-Mean-Square Value of Alternating Current Mean (or Average) Value of Alternating Current : An alternating current flows during one half-cycle in one direction and during the other half-cycle in the opposite direction. Hence, for one complete cycle the mean value of alternating current is zero. This is why there is no deflection in a moving-coil galvanometer when an alternating current passes through it. However, the mean value of alternating current over half a cycle is a finite quantity and, in fact, it is this quantity which is defined as the 'mean value' of alternating current. It is given by imean = 1 T 2 T 2 i dt, 0 where i is instantaneous value of the current. Now i = i0 sin Өt, where i0 is the peak value of the current and T= 2 . imean 2 i 0 = 0.637 i0. Thus, the mean (or average) value of a.c. for a half-cycle (t = 0 to t = T ) 2 is 0.637 times, or 63.7%, of the peak value. Similarly, the mean value of a.c. for the other half-cycle (t = will be – 0.637 i0. Obviously, it is zero for the full cycle. T to t = T) 2 Root-mean-square Value of Alternating Current: The root-mean- square (rms) value of an alternating current is defined as the square-root of the average of i2 during a complete cycle, where i is the instantaneous value of the alternating current. Now, the average value of i2 over a complete cycle is given by T 1 i T i 2 2 dt. 0 Putting i = i0 sin Өt and T = 2 , we get i20 i . 2 2 Hence the root-mean-square value of the alternating current is given by irms i2 = i0 2 0.707 i0. Thus, the root-mean-square value of an alternating current is 0.707 times, or 70.7%, of the peak value. In a similar way, the root-mean-square value of an alternating emf represented by E = E0 sin Өt is given by Erms E0 2 = 0.707 E0. The ammeter measuring alternating current gives directly the rms value of the current. Similarly, the voltmeter measuring alternating voltage gives the rms value of the voltage. If an ammeter connected in an alternating-current circuit reads 5 A, it means that the rms value of the current is 5 A. In our houses, the alternating current is supplied at 220 V. It actually means that the rms value of the alternating voltage is 220 V, The peak voltage of the current is V0 = = 2 × rms value of the voltage 2 × 220 = 311 V. Hence the voltage in domestic supply varies from + 311 V to – 311 V in each cycle. It is due to this reason that 220 V a.c. is more dangerous than 220 V d.c. The root-mean-square value of alternating current has special significance. If an alternating current given by i = i0 sin Өt passes through a resistance R, the instantaneous rate of production of heat is P = i2 R. Since the magnitude of the current i is changing, the rate of production of heat P will also be changing. The average' rate of production of heat over one complete cycle of current is P i2 R, where i2 is the mean of the square of the current (i2) over one complete cycle, i.e. i2 = (irms)2. Thus P irms R. 2 If we pass a direct current of strength irms in a resistance R, then also the rate of production of heat will be (irms)2 R. Thus, the root-mean-square value of an alternating current is equal to that direct-current which would produce heat in a given resistance at the same rate as the alternating current. Hence, the root-mean-square value of an alternating-current (irms) is also called the 'effective value' or 'virtual value' of the current. ivirtual = irms = i0 2 . Similarly, the root-mean-square value of an alternating emf is equal to that direct emf which would produce heat in a given resistance at the same rate as the alternating emf. Hence, the root-mean-square value of an alternating emf (Erms) is also called the 'effective value' or 'virtual value' of the emf. Evirtual = Erms = 4. E0 2 . Measurement of Alternating Current and Voltage If we pass an alternating current through an ordinary ammeter, then there will be no deflection in its needle. The reason is that the direction of alternating current changes very rapidly. Therefore, the direction of the magnetic field produced due to the current in the ammeter-coil and hence the direction of the deflection of the needle will also change with equal rapidity. But, because of its inertia, the needle cannot change its direction with that rapidity. So, it remains stationary in its mean position. Similarly, on passing an alternating current through a voltameter, the polarity of the plates of the voltameter will change very rapidly and, as a result, there will be no electrolysis. Clearly, to measure alternating current, some property of the current which is independent of the direction of the current, will have to be used. An example is the 'heating effect' of current. We know that when an electric current is passing through a resistance wire, the wire is heated and its length is increased, whatever be the direction of current. Hence it can be used to measure the alternating current. Ammeters and voltmeters used to measure alternating currents and alternating voltages are based on this principle. These are called 'hot-wire ammeter' and 'hot-wire voltmeter'. Hot-wire Ammeter : It consists of a resistance-wire AB (Fig. 2) of high coefficient of linear expansion and high specific resistance which is stretched between two screws. This wire is made of platinum-iridium alloy which is not easily oxidised. A silk-thread tied to the middle point C of the wire AB is wound round a cylinder D and then connected to a spring M. The cylinder D can rotate about its axis. At its centre is attached a pointer which moves over a scale graduated in ampere. A and B are connected to two bindingscrews P1 and P2 fitted at the base of the instrument. A thick wire called the 'shunt' is connected between P1 and P2 in parallel with AB. Working : When alternating current is passed through the wire AB, the length of the wire increases and it becomes loose. As a result, the spring M pulls the silk thread downward and the cylinder D rotates in the clockwise direction and the pointer moves towards right on the scale. Whatever be the direction of current in the wire, the pointer will always move towards right. (That is why no positive and negative signs are marked on the scale). The deflection of the pointer is proportional to the increase in the length of the wire and this increase in length is proportional to the heat produced. According to Joule's law, the heat produced in the wire is proportional to the square of the strength of the current in the wire. Thus, the deflection 6 of the pointer is proportional to the square of the current (i2) through the wire, i.e., i2. But the scale is so graduated that it reads directly in ampere. This is why, the marks on the scale are not equidistant, and the distance between them goes on increasing. Hot-Wire Voltmeter: The construction of the hot-wire voltmeter is just like the hot-wire ammeter except that instead of shunt, a high-resistance wire is connected in series with AB. Here, the deflection 0 of the pointer is proportional to the square of the potential difference (V2) across the ends of the wire, i.e., V2 But the scale is so graduated that it reads directly in volt. This is why the scale is not marked at equal distances. In the beginning the marks are closer but gradually the distance between them increases. 5. Phasors and Phasor Diagrams In an alternating-current circuit, although the frequency of alternating current and alternating emf is same but it is not necessary that the alternating current and alternating emf be in the same phase. Usually, when the current in the circuit is maximum, the emf is not maximum. The phase difference between the two depends upon the type of the circuit. In certain circuits, the current reaches its maximum value after the emf becomes maximum. Then the current is said to 'lag' behind the emf. In certain other circuits, the current reaches its maximum value before the emf has become maximum. In such cases the current is said to 'lead' the emf. The study of a.c. circuits is much simplified if we treat alternating current and alternating emf as vectors with the angle between the vectors equal to the phase difference between the current and the emf. The current and emf vectors are more appropriately called 'phasors'. A diagram representing alternating current and alternating voltage (of same frequency) as vectors (phasors) with the phase angle between them is called a 'phasor diagram'. 6. Different Types of A.C. Circuits In an alternating-current circuit the phase difference between the current and the emf depends upon the type of the circuit. We shall first study simple circuits containing only one element (resistor, inductor or capacitor) and then circuits containing combinations of these basic circuit elements. (i) Circuit containing Resistance only: Let an alternating emf given by E = E0 sin Өt, …(i) be applied across a pure (non-inductive) resistance R Let i be the instantaneous current in the circuit. By Ohm's law, the applied emf at any instant, E, must be equal to iR, the p.d. across the resistance at that instant. That is E = iR or E0 sin Өt = iR or i = But E0 sin t. R E0 i0 , the peak value of the current in the circuit. R i i0 sin t. …(ii) A comparison of eq. (ii) with eq. (i) shows that in a pure resistor the current is always in phase with the applied emf. This phase relationship graphically. (ii) Circuit containing Inductance only : Let an alternating emf given by E = E0 sin Өt, be applied across a pure (zero resistance) coil of inductance L . As the current i in the coil varies continuously, an opposing (back) emf is induced in the coil whose magnitude is L where di is the rate of change of current. The net instantaneous emf is dt thus E0 sin –L di . But this should be zero because there is no dt resistance in the circuit. Thus E0 sin t L or L di 0 dt di E0 sin t dt E0 sin t dt. L or di Integrating both sides, we have di or i di , dt E0 L sin t dt E0 cos t L = E0 cos t L or i = E0 sin t . L 2 The maximum value of sin t E is 1. Therefore, 0 is the L 2 maximum current is the circuit. Thus i = i0 sin t , 2 E0 is the peak value of current. A comparison of this L where i0 equation with the emf equation E = E0 sin t shows that in a pure inductor the current lags behind the emf by a phase angle of (or the emf leads the current by a phase angle of or 90° 2 or 90°). This means 2 that when the emf is maximum, the current is zero and vice-versa. Fig. 7 (a) shows this phase relationship graphically. Fig. 7 (b) is the corresponding phasor diagram. Inductive Reactance : The peak value of current in the coil is i0 E0 . L Applying Ohm's law, we find that the product ѠL has the dimensions of resistance. It represents the 'effective opposition' of the coil to the flow of alternating current. It is known as the 'reactance of the coil' or 'inductive reactance' and is denoted by XL. Thus XL = ѠL = 2Ѡ fL, Where f is the frequency of the alternating current. Thus, the inductive reactance increases with increasing frequency of the current. This is easy to understand. The inductive reactance XL (= 2Ѡ f L) is zero for d.c. for which f = 0. (iii) Circuit containing Capacitance only: Let an alternating emf given by E = E0 sin Өt be applied across the plates of a perfect capacitor of capacitance C. As the emf is alternating, the charge on the capacitor plates varies continuously and correspondingly current flows in the connecting leads. Let q be the charge on the capacitor plates and i the current in the circuit at any instant. Since there is no resistance in the circuit, the instantaneous p.d. q across the capacitor plates must be C equal to the (alternating) applied e.m.f. This is q E0 sin t. C The instantaneous current i in the circuit is, therefore, given by i = dq dt d E sin t dt 0 = E0 cos t = E0 sin t 1 2 C The maximum value of sin t E is 1. Therefore, 0 is the 1 2 C maximum current in the circuit.Thus i i0 sin t . 2 E where i0 0 is the peak value of current. A comparison of this 1 C equation with the emf equation E = E0 sin Өt shows that in a perfect capacitor the current leads the emf by a phase angle of the emf lags behind the current by a phase angle of or 90° (or 2 or 90°). This 2 means that when the emf is zero, the current is maximum and vice- versa. shows this phase relationship graphically. The corresponding phasor diagram. Capacitive Reactance: The peak value of current in the capacitor circuit is i0 E0 . 1 C Applying Ohm's law, we find that the quantity 1 has the dimensions C of resistance. It represents the 'effective opposition' of the capacitor to the flow of alternating current. It is known as the 'reactance of the capacitor' or 'capacitve reactance' and is denoted by XC. Thus XC 1 1 , C 2 f C where f is the frequency of the alternating current. Thus, the capacitive reactance decreases with increasing frequency of current. 1 is in 2 f C When C is in farad and f in hertz (cycles/sec), then XC ohm. 1 The capacitive reactance XC in infinite for d.c. for which f = 2 f C 0. The reciprocal of reactance (inductive or capacitive) is called 'susceptance' of the a.c. circuit. It is measured in 'mho' or 'ohm–1 (Ѡ–1) or 'siemen' (S). (iv) Circuit containing Inductance and Resistance in Series (L–R Series Circuit): Let an alternating emf E = E0 sin t be applied to a circuit containing an inductance L and a non-inductive resistance R in series. The same current will flow both in L and R. Let i be the current in the circuit at any instant and VL and VR the p.d.'s across L and R respectively at that instant. Then VL = iXL and VR = iR, where XL is the inductive reactance. Now, VR is in phase with the current i, while VL leads i by 90°. Thus VR and VL are mutually at right angles. (Their sum is not equal to the impressed emf E.) The vector OA represents VR (which is in phase with i), while OB represents VL (which leads i by 90°). The vector OD represents the resultant of VR and VL, which is the applied emf E. Thus E2 VR2 VL2 or E2 i2 R2 XL2 or i E R 2 XL2 . Applying Ohm's law, we see that R2 XL2 is the effective resistance of the circuit. It is called the 'impedance' of the circuit and is represented by Z. Thus, in L–R circuit, we have Z= R2 XL2 But XL = ѠL. Z R2 L . 2 The quantity Z, measured in ohm, is called impedance because it impedes the flow of alternating current in the circuit. The reciprocal of impedance is called 'admittance' of the a.c. circuit. It is measured in 'mho' or 'ohm–1' (Ω–1) or 'siemen' (S). (v) Circuit containing Capacitance and Resistance in series (C–R Series Circuit): In this case (Fig. 11 a), the instantaneous p.d.'s across C and K are given by VC = i XC and VR = i R, where XC is the capacitive reactance and i is the instantaneous current. Now VR is in phase with i, while VC lags behind i by 90°. The phasor diagram is drawn, in which the vector OA represents VR (in phase with i) and the vector OB represents VC (lagging behind i by 90°). The vector OD represents the resultant of VR and VC which is the applied emf E. Thus E2 VR2 VC2 or E2 i2 R2 X2C or i = E R 2 X2C . Appling Ohm's law R2 X2C is the effective resistance of the circuit and is called the 'impedance' Z of the circuit. Thus, in C–R circuit, We have Z R2 X2C . But XC = 1 . C 2 1 Z R . C 2 The phasor diagram (Fig. 11 b) shows that in C–R circuit the aplied emf E lags behind the current i (or the current leads the emf E) by a phase angle Ө, given by 1 V X tan C C C . VR R R (vi) Circuit containing Inductance and Capacitance (L–C Circuit): In this case, the potential difference VL across L will lead the current i in phase by 90°, while the potential difference VC across C will lag behind the current i in phase by 90°. Thus the phase difference between VL and VC will be 180°, i.e. they will be in opposite phase to each other. Hence, the resultant potential difference in L–C circuit is E = VL ~ VC and the impedance of the circuit is Z = XL ~ XC. If, in the circuit, XL, = XC, then the impedance Z = 0. In this situation the amplitude of current in the circuit would be infinite. It will be the condition of 'electrical resonance'. Thus, in the condition of electrical resonance, we have XL = XC or L 1 C 1 2 f C or 2 f L or f 2 or f 1 4 L C 2 1 2 1 LC . This is called the 'resonant frequency' of the circuit. (vii) Circuit containing Inductance, Capacitance and Resistance in Series (L– C–R Series Circuit): Let an alternating emf E = E0 sin t be applied to a circuit containing an inductance L, a capacitance C and a resistance R all joined in series (Fig. 12a). The same current will flow in all the three and the vector sum of the p.d.'s across them will be equal to the applied emf. Let i be the current in the circuit at any instant of time and VL, VC and VR the p.d.'s across L, C and R respectively at that instant. Then VL = i XL, VC = i XC and VK = i R, where XL and XC are the, inductive and capacitive reactances respectively. Now, VR is in phase with i but VL leads i by 90° while VC lags behind i by 90°. The phasor diagram is drawn. In this diagram, the vector OA represents VR (which is in phase with i), the vector OB represents VL (which leads i by 90°) and the vector OC represents VC (which lags behind i by 90°). VL and VC are opposite to each other. If VL > VC (as shown in Fig.), then their resultant will be (VL – VC) which is represented by the vector OD. Finally, the vector OF represents the resultant of VR and (VL – VC), that is, the resultant of all the three, which is the applied emf E. Thus E2 VR2 VL VC 2 2 or E2 i2 R2 XL XC or i = E R XL XC 2 2 . Applying Ohm's law, we see that R2 XL XC is the effective 2 resistance of the circuit and is called the 'impedance' Z of the circuit. Thus, in L–C–R circuit, we have Z= R2 XL XC 2 But XL = ѠL and XC = 1 . C 2 1 Z R L . C 2 The phasor diagram (Fig. 12 b) shows that in L–C–R circuit the applied emf E leads the current i by a phase angle , given by tan = VL VC VR XL XC R L = R 1 C . The following three cases arise : (i) When ѠL > 1 , then tan ф is positive i.e. ф is positive. In this C case, the emf E leads the current i. (ii) When ѠL < 1 , then tan ф is negative i.e. ф is negative. In this C case, the emf E lags behind the current i. (iii) When L 1 , then tan ф = 0 i.e. ф = 0. In this case, the emf C E and the current i are in phase. Again, when ѠL = 1 , C we have 2 1 Z R L R, C 2 which is the minimum value Z can have. Thus, in this case, the impedance is minimum (and is purely resistive) and hence the current is maximum. This is the case of 'electrical resonance'. Hence at resonance L 1 C (or XL = XC) 1 . LC or But Ѡ = 2πf, where f is the frequency of the applied emf. Therefore f 1 2 LC = f0 (say), 1 where f0 is the natural frequency of the circuit when the 2 LC resistance is zero (or small). Thus, the condition for resonance is that the frequency of the applied emf should be equal to the natural frequency of the circuit when the resistance of the circuit is zero. Impedance Triangle : The impedance of an L–C–R a.c. circuit is given by Z R2 XL XC 2 and the phase relationship given by tan XL XC , R in terms of the resistance and the reactances of the circuit elements may be expressed by means of a right-angled triangle, as shown in Fig. 13. This triangle is called as 'impedance triangle'. 7. Series Resonant Circuit Series Resonant Circuit : Let us consider an alternating-current circuit having inductance L, capacitance C and resistance R connected in series. The impedance of the circuit is Z R2 XL XC 2 2 1 . = R L C 2 If the phase difference between the applied alternating voltage and the resulting current be , then XL XC R tan L = R 1 C . the inductive reactance XL and the capacitive reactance XC of the circuit be equal, then the voltage and the current will be in the same phase (ф = 0). In this condition, the impedance Z of the circuit will be minimum (= R) and the current i will be maximum. This is the condition of resonance. Thus, for resonance, we have XL XC L 1 C 1 LC f= = 2 1 2 LC is the frequency of the applied alternating emf. For resonance, it should be But 1 . 2 LC 1 is the natural frequency of an L–C–R circuit (when R is 2 LC small). So, in a series resonant circuit, the frequency of the applied voltage is equal to the natural frequency of the circuit. A graph between the frequency f of the applied voltage and the current i 1 in the circuit is shown, in which f is the natural frequency 2 LC of the circuit. For f = f0, the current is maximum (imax). Both for f < f0, and f > f0, the current is less than its maximum value. The maximum value of the current, however, depends on the resistance R in the circuit. Two curves between f and i for circuit resistances R and 2R. The maximum current for 2R is half of that for R. Also, the resonance is sharper for smaller resistance. The resonant frequency f0 remains, however, unaffected. The characteristic of the series resonant circuit is that the potential differences available across the inductance L and across the capacitor C may be much more than the applied voltage. 8. Q-factor of an L–C–R Circuit : Sharpness of Resonance : Half-power Frequencies Sharpness of Resonance : When an alternating emf E0 sin t is applied to an L–C–R circuit, electrical oscillations occur in the circuit with the frequency Ѡ of the applied emf. The amplitude of these oscillations (current amplitude) in the circuit is given by i0 = E0 1 R 2 L C 2 , 1 where R L C 2 2 is the "impedance" Z of the circuit. E0 R The rapidity with which the current falls from its resonant value with change in applied frequency is known as 'sharpness of resonance'. It is measured by the ratio of the resonant frequency 0 to the difference of two frequencies Ѡ1 and Ѡ2 at which the current falls to 1 of the 2 resonant value. That is, sharpness of resonance = 0 . 0 1 Ѡ1 and Ѡ2 are known as 'half-power frequencies', because at these frequencies the power in the circuit reduces to half its maximum value. The difference of half-power frequencies, Ѡ2 – Ѡ1, is known as "bandwidth". The smaller is the band-width, the sharper is the resonance. Expression for Band-Width: At resonant frequency Ѡ0, the impedance is R. Therefore, at Ѡ1 and Ѡ2 it must be 2 R , that is, 1 Z R L C 2 2 = 2R 2 1 or R L 2R 2 c 2 2 1 or L R2 C or L 1 R. C Thus, if Ѡ2 > Ѡ1, we can write 1L 1 R 1C and 2L …(i) 1 R. …(ii) 2C Adding (i) and (ii), we get 1 2 0 12 1 2 L C1 or 12 1 . LC Subtracting (i) from (ii), we get 2 1 2R 1 2 2 1 L C1 or 2 1 L 1 2R C 1 2 or 2 1 L L 2R 1 2 1 LC or 2 1 R . L …(iii) This is the expression for the "band-width". Expression for Half-power Frequencies: From, we have 2 0 = 0 2 1 2 R 2L and 1 0 0 2 1 2 R . 2L Quality (Q) Factor of L–C–R Circuit: The Q-factor of an L–C–R circuit is a dimensionless quantity which describes quantitatively the sharpness of resonance of the circuit. It is defined as Q= = resonant frequency band-width 0 , 2 1 where Ѡ2 and Ѡ1 are the half-power frequencies. Substituting the value of Ѡ2 – Ѡ1 from eq. (iii), we get Q 0L . R Also, 0 Q 9. 1 R 1 . LC L . C Power in a.c. Circuit The rate of dissipation of energy in an electrical circuit is called the 'power'. It is equal to the product of the voltage and the current. If the current be in ampere, the voltage in volt, then the power will be in 'watt'. The power of an alternating-current circuit depends upon the phase difference between the voltage and the current. The instantaneous values of the voltage and the current in an a.c. circuit are given by E E0 sin t and i i0 sin t where ф is the phase difference between the voltage and the current. Then, the instantaneous power in the circuit is Pins = E × i = E0 sin Ѡt × i0 sin (Ѡt – ф) = E0 i0 sin t sin t cos cos t sin = E0 i0 sin2 t cos sin t cos t sin = E0 i0 sin2 t cos 1 sin2t sin . 2 For one complete cycle, sin2 t 1 and sin 2t 0. 2 Therefore, the average power P in the circuit is given by P = 1 E i cos 2 0 0 E0 2 i0 2 cos or P Erms irms cos . cos ф is known as the 'power factor' of the circuit and its value depends upon the nature of the circuit. Wattless Current: If the circuit contains either inductance only or capacitance only (resistance is zero), then the phase difference ф between current and voltage is 90°. The average power in such a circuit is P = Erms × irms × cos 90° = 0. [ cos 90° = 0] Thus, if the resistance in an a.c. circuit is zero, although current flows in the circuit, yet the average power remains zero, that is, there is no energy dissipation in the circuit. The current in such a circuit is called 'wattless current'. In practice, however, a wattless current is not a reality because no circuit can be entirely resistanceless. It is for this reason that in a.c. circuits, either an inductor or a capacitor is used for controlling the current. Choke Coil In a direct-current circuit, the current is reduced by means of a rheostat. This results in a loss of electrical energy i2 R per second as heat. The current in an alternating-current circuit may, however, be reduced by means of a device which involves little loss of energy. This device is called 'choke-coil'. Construction : It is a high-inductance coil made of thick, insulated copper wire wound closely in a large number of turns over a soft-iron laminated core. Since the wire is of copper and is thick, its resistance (R) is almost zero, but due to the large number of turns and high permeability of the iron-core, its inductance (L) is quite high. The coil, therefore, offers a large reactance (ѠL) and contributes to the impedance R2 2 L2 of the circuit. Thus, it reduces the alternating current appreciably. There is an arrangement to insert the core into the coil to any desired depth. More is the length of the core inside the coil; greater is the inductance (L) of the coil and so greater the impedance. Hence this coil can be used to vary the current in the alternating-current circuit. The current in an alternating-current circuit can also be reduced by inserting a resistance R through a rheostat, but then an energy irms2 R will be lost as heat in each cycle of current, where irms is the current in the circuit. On the other hand, the loss of energy in a choke-coil is almost negligible. The average power dissipated in the choke coil (L–R circuit) is given by P Erms irms cos , …(i) where the power factor is given by cos R R 2 2 L2 . Since the resistance R of the choke-coil is nearly zero and its inductance L is very high, so cos 0 approx. Thus, according to eq. (i), the average power dissipated in choke-coil will be nearly zero. The resistance R of a choke coil is not exactly zero. That is why, in practice, some electrical energy is lost as heat. In addition to it, energy is also lost due to hysteresis-loss in the iron-core of the choke-coil. The loss of energy due to eddy currents is reduced by laminating the iron-core. The choke-coil can be used only in a.c. circuits, not in d.c. circuits, because for direct-current (Ѡ = 0) the inductive reactance L of the coil is zero, only the resistance of the coil remains effective which too is almost zero. Transformers A transformer is a device, based on the principle of mutual induction, which is used for converting large alternating current at low voltage into small current at high voltage, and vice-versa. The transformers which convert low voltages into higher ones are called 'step-up' transformers, while those which convert high voltages into lower ones are called 'stepdown' transformers. Transformers are used only in a.c. (not in d.c.). Construction : A simple transformer consists of two coils called the 'primary' and the 'secondary', which are insulated from each other and wound on a common soft-iron laminated core, One of the two coils has a smaller number of turns of thick insulated copper wire while the other has a large number of turns of thin insulated copper wire. In a step-up transformer the coil of thick copper wire having smaller number of turns is the primary coil, and the coil of thin wire having larger number of turns is the secondary coil. In the step-down transformer, the order is reversed. Theory : The given source of emf, say a.c. mains, is always connected to the primary coil. When alternating current flows through the primary coil, then in each cycle of current, the core is magnetised once in one direction and once in the opposite direction. Hence an alternating magnetic flux is produced in the core. Since the secondary coil is also wound on the same core, the magnetic flux passing through it changes continuously due to the repeated magnetisation and demagnetisation of the core. Therefore, by mutual induction, an alternating emf of the same frequency is induced in the secondary coil. The induced emf in the secondary coil depends upon the ratio of the number of turns in the two coils. Let Np, and Ns be the number of turns in the primary and the secondary coils respectively. Let us assume that there is no leakage of magnetic flux so that the same flux passes through each turn of the primary and the secondary. Let be the flux linked with each turn of either coil at any instant. Then, by Faraday's law of electromagnetic induction, the emf induced in the primary coil is given by ep Np , t and the emf induced in the secondary coil is given by es Ns . t es Ns . ep NP If the resistance of the primary circuit be negligible and there be no loss of energy in it, then the induced emf ep in the primary coil will be nearly equal to the applied voltage Vp across its ends. Similarly, if the secondary circuit is open, then the voltage Vs across its ends will be equal to the emf es induced in it. Under these ideal conditions, we have Vs e N s s r, Vp ep Np where r is called the 'transformation ratio'. In step-up transformer, r is more than 1; whereas in step-down transformer, r is less than 1. Thus voltage obtained across secondary voltage applied across primary = no. of turns in secondary . no. of turns in primary If ip and is be the currents in the primary and the secondary at any instant and the energy losses be zero, then power in the secondary = power in the primary i.e. Vs is Vp ip or ip is Vs Ns r. Vp Np Thus, when the voltage is stepped-up, the current is correspondingly reduced in the same ratio, and vice-versa. Thus, the energy obtained from the secondary coil is equal to the energy given to the primary coil. Obviously, a transformer is not a generator of electricity. Energy Losses in a Transformer: In practice, the power output of a transformer is less than the power input because of unavoidable energy losses. These losses are : (i) Copper Losses : As the alternating current flows through the primary and the secondary, heat is developed inside the copper turns. This waste of energy is known as 'copper losses'. (ii) Eddy Current Losses : Eddy currents are set up in the iron core of the transformer and generate heat, with consequent loss of energy. To minimise these losses the iron core is laminated by making it of a number of thin sheets of iron insulated from each other, instead of making it from one solid piece of iron. (iii) Flux Losses : The coupling of the primary and the secondary coils is never perfect. Therefore, the whole of the magnetic flux generated in the primary does not pass through the secondary. On account of these losses, we have Vs is Vp ip. (iv) Hysteresis Losses : During each cycle of a.c. the core is taken through a complete cycle of "magnetisation. The energy expanded in this process is finally converted into heat and is therefore wasted. This loss is minimised by using the core of a magnetic alloy for which the area of the hysteresis loop is a minimum. Utility of Transformers in Long-distance Power Transmission : If electric power generated at the power station, say 22,000 watt, be transmitted over long distances at the same voltage as required by consumers, say 220 volt, a number of disadvantages will arise : (i) The current i flowing through the line wires will be very high (= 22,000/220 = 100 amp). Hence a large amount of energy (i2 Rt) will be lost as heat during transmission, R being the resistance of the line wires. (ii) The voltage drop along the line wire (iR) will be considerable. Hence the voltage at the receiving station will be considerably lower than the voltage at the generating station. (iii) The line wires, which are to carry the high current, will have to be made thick. Such wires will be expensive and require stronger poles to support them. If however, the power is transmitted at a high voltage, (say 11,000 volt), all the above disadvantages almost disappear. The current flowing through the line wires will then be only 22,000/11,000 = 2 amp. This will cause much less heating, much less voltage-drop along the line wire and will require much thinner line wires. Hence, the electric power generated at the power station is stepped-up to a very high voltage by means step-up transformer and transmitted to distant places. At the place where the supply is required, it is again stepped-down by a step-down transformer. Only alternating-current is suitable for this transmission because only alternating-voltage can be stepped-up or stepped-down by means of transformers. AC GENERATOR OR DYNAMO It is used to convert mechanical energy into electrical energy. Construction : The main components of ac generator are : (i) Armature coil: If consist of large number of turns of insulated copper wire wound over iron core. (ii) Magnet : Strong permanent magnet (for small generator) or an electromagnet (for large generator) with cylindrical poles in shape. (iii) Slip rings : The two ends of the armature coil are connected to two brass rings R1 and R2. These rings rotate along with the armature coil. (iv) Brushes : Two carbon brushes (B1 and B2), are pressed against the slip rings. These brushes are connected to the load through which the output is obtained. Principle : It works on the principle of electromagnetic induction. According to it when a coil is rotated in magnetic field, an emf is induced in the coil. The coil may be rotated by water energy, steam energy or oil energy. Let at any instant magnetic flux through armature coil, NфB = NBA cos ф = NBA cos фt The induced emf e= dB dt = NBA ф sin фt or e = e0 sin фt, where e0 = NBA ф. and induced current i= = e R e0 sin t R = i0 sin Ѡt DC GENERATOR It produces direct current. It is possible by providing split rings or commutator in place of slip rings. DC generator consists of: (i) armature coil, (ii) magnet, (iii) split rings, (iv) brushes. For DC generator output current i i0 sin t DC MOTOR It is an electrical machine which converts electrical energy into mechanical energy. Principle: It is based on the fact that a current carrying coil placed in magnetic field experiences a torque. Because of this torque the coil starts rotating. Construction: It consists of (i) strong magnet, (ii) armature, (iii) split rings, (iv) brushes. By experiments, M12 = M12 = M. Thus e1 M di2 dt and e2 …(1) di1 …(2) dt The SI unit of M is henry. The coefficient of mutual induction depends on the shape, size, the mutual arrangement of the coils, as well as the magnetic permeability of the medium surrounding the coils. Reciprocity theorem Calculations show (and experiments confirm) that in the absence of material medium between the coils, the coefficients M12 and M21 are equal: M12 = M21 This property of mutual inductance is called the reciprocity theorem. Because of this reason, we do not have to distinguish between M12 and M21 and can simply speak of the mutual inductance of two circuits. Example 43. Two circular loops 1 and 2 whose centres coincide lie in a plane (see fig. 8.82). The radii of the loops are a1 and a2. Current i flows in loop 1. Find the magnetic flux ф2 associated by loop 2, if a1 << a2. Solution: The direct calculation of the flux ф2 is clearly a rather complicated problem since the configuration of the field itself is complicated. However, the application of the reciprocity theorem greatly simplifies the solution of the problem. Let us pass the same current i through loop 2. Then the magnetic flux ф1 created by this current through loop 1 can be easily found, provided that a1 << a2 : it is sufficient to multiply the magnetic field B at the centre of the loop B of the circle. Thus, 2 1 = B2 A1 = 0 i a12 Ans. 2a2 where k is called coefficient of coupling; 0 i by the area a12 2a2 0 < k < 1. For tight coupling k = 1, for loose coupling k < 1 k can be defined as, k= Magnetic flux linked in secondary Magnetic flux linked in primary