Handout 6
advertisement

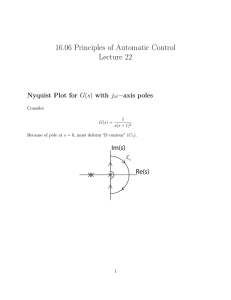
Part IB Paper 6: Information Engineering LINEAR SYSTEMS AND CONTROL Glenn Vinnicombe HANDOUT 6 “Feedback stability and the Nyquist diagram” If L(s) is stable , then: (either marginally or asymptotically) " " ! −1 ! −1 −1 L(jω) L(s) is 1 + L(s) asymptotically stable =⇒ " ! L(jω) L(s) is 1 + L(s) marginally stable =⇒ L(jω) L(s) is 1 + L(s) unstable =⇒ That is, the closed-loop system is stable if the Nyquist diagram of the return ratio doesn’t enclose the point “−1”. Summary The Nyquist diagram of a feedback system is a plot of the frequency part ! " response of the return ratio, with ! the imaginary " ! L(jω) plotted against the real part " L(jω) on an Argand diagram (that is, like the Bode diagram, it is a plot of an open-loop frequency response). The Nyquist stability criterion states that, if the open-loop system is asymptotically stable (i.e. the return ratio L(s) has all its poles in the LHP) and the Nyquist diagram of L(jω) does not enclose the point “−1”, then the closed-loop system will be asymptotically stable (i.e. the # $ closed-loop transfer function L(s)/ 1 + L(s) will have all its poles in the LHP) The real power of the Nyquist stability criterion is that it allows you to determine of the stability of the closed-loop system from the behaviour of the open-loop Nyquist diagram. This is important from a design point of view, as it relatively easy to see how changing K(s) affects L(s) = H(s)G(s)K(s), but difficult to see how changing K(s) affects L(s)/(1 + L(s)) directly, for example. In addition, the Nyquist diagram also allows more detailed information about the behaviour of the closed-loop system to be inferred. For example Gain and phase margins measure how close the Nyquist locus gets to −1 (and hence how close the closed loop system is to instability). Contents 6 Feedback stability and the Nyquist diagram 1 6.1 The Nyquist Diagram . . . . . . . . . . . . . . . . . . . . . . 4 6.1.1 Sketching Nyquist diagrams . . . . . . . . . . . . . . 7 6.2 Feedback stability . . . . . . . . . . . . . . . . . . . . . . . . 8 6.2.1 Significance of the point “−1” 6.2.2 Example: . . . . . . . . . . . . . 9 . . . . . . . . . . . . . . . . . . . . . . . . . 9 6.3 Nyquist Stability Theorem . . . . . . . . . . . . . . . . . . . . 12 6.4 Gain and Phase Margins . . . . . . . . . . . . . . . . . . . . . 13 6.4.1 Gain and phase margins from the Bode plot . . . . . 14 6.5 Performance of feedback systems . . . . . . . . . . . . . . . 15 6.5.1 open and closed-loop frequency response . . . . . . 16 6.6 The Nyquist stability theorem (for stable L(s)) . . . . . . . 19 6.6.1 Notes on the Nyquist Stability Theorem: . . . . . . . 20 6.1 The TheNyquist NyquistDiagram Diagram 6.1 The Nyquist diagramofofaasystem systemG(s) G(s)isisaaplot plotofofthe thefrequency frequency The TheNyquist Nyquistdiagram response G(jω) onan anArgand Arganddiagram. diagram. response responseG(jω) G(jω)on That is: plotofof!(G(jω)) !(G(jω))vsvs"(G(jω)). "(G(jω)). That Thatis: is:itit itisis isaaplot !! "" G(jω) !!G(jω) ∠G(jω ∠G(jω11)) !! "" G(jω) ""G(jω) The Nyquist locus The The Nyquist locus The Nyquist locus |G(jω11)|)| |G(jω ω==ω ω11 ω Examples: Examples: Examples: Integrator: Integrator: Integrator: 111 G(s) G(s) = G(s)= = sss −j −j 111 G(jω) = G(jω) = = G(jω)= = = jω jω jω ω ω |G(jω)| |G(jω)| = |G(jω)|= =1/ω 1/ω ◦ ∠G(jω) = ∠G(jω) ∠G(jω)= =−90 −90◦ 20dB 2 20dB 20dB 0dB 0dB 0dB 0dB 0.1 0.1 0.1 0.1 00◦◦◦◦0.1 00 0.1 0.1 0.1 ◦◦ −90 −90 −90 −90◦◦ 11 11 ω ω ω 10 10 10 11 11 ω ω ω 10 10 10 "" !! % G(jω) G(jω) % ω =∞ ∞ ω= −j −j !!! """ $ $ G(jω) $ G(jω) G(jω) ω ω= = 11 !!!! """" $ G(jω) $ $$G(jω) G(jω) G(jω) Time Delay: Time Time Delay: TimeDelay: Delay: −sT −sT G(s) = G(s) G(s) ==eee−sT G(s)= e−sT −jωT −jωT −jωT G(jω) = G(jω) G(jω)= e G(jω) ==eee−jωT 111 |G(jω)| = |G(jω)| |G(jω)|= |G(jω)| ==1 arg G(jω) = −ωT arg G(jω) arg G(jω)= arg G(jω) == −ωT −ωT −ωT (radians) (radians) (radians) (radians) 20dB 20dB 20dB 2 20dB 0dB 0dB 0dB 0dB 0.1 0.1 0.1 0.1 TTTT ◦◦ 000◦◦00.1 0.1 0.1 0.1 TTTT ◦ ◦ ◦ −90 −90◦ −90 −90 1111 TTTT 1111 TTTT ω ω ω ω 10 10 10 10 TTTT ω ω ω ω 10 10 10 10 TTTT !!!! """" # # G(jω) # G(jω) #G(jω) G(jω) ω ω ==0 00 ω= π ππ ω ω= ω == 2T 2T 2T First-order lag: First-order lag: First-order First-order lag: First-order lag: First-order lag: lag: 111 1 G(s) = 1 G(s) = G(s) = G(s) = G(s) = G(s) =111+ sT + sT sT +sT sT 11++ 111 1 1 G(jω) == G(jω) G(jω) G(jω) = 11+ G(jω) G(jω)== jωT + jωT jωT +jωT jωT 111++ 111 1 1 1 ! |G(jω)| = |G(jω)| = ! ! |G(jω)| = |G(jω)| = ! ! |G(jω)| |G(jω)|== 11+ 222 222 ω T 2 + ω T 2 2 1 + ω T 2 1 + ω T 11++ωω TT 22 ∠G(jω) = − arctan(ωT ∠G(jω) = − arctan(ωT ∠G(jω) = − arctan(ωT ∠G(jω) = − arctan(ωT ∠G(jω) ∠G(jω)= =− −arctan(ωT arctan(ωT))))) 20dB 20dB 20dB 20dB 2 20dB 20dB 0dB 0dB 0dB 0dB 0.1 0.1 0.1 0dB 0.1 0dB 0.1 0.1 T T TTT T ◦◦◦◦◦0.1 ◦ 0 0 0 0 0.1 0 00.1 0.1 0.1 T T ◦TTT T ◦ ◦ −90 ◦ ◦ −90 −90 −90 −90 −90 1 1111 1 T T T TT 1 1111 TTTTT ω ω ω ω ω 10 10 10 10 10 10 T T TTT ω = 0 ω = 0 ω ω=0 1 1 1 ω = ω= = ω ω =T T T T ω =→ ∞ ω =→ ∞ ω =→ =→ ∞ ∞ ω " # "" ## " # ( G(jω) ( G(jω) ' G(jω) ( ( ( G(jω) G(jω) ω = ∞ ω ω ω= =∞ ∞ ω ω ω ω ω 10 10 10 10 10 T T TTT −0.5j −0.5j −0.5j |G(jω)| |G(jω)| |G(jω)| |G(jω)| 1 1 1 1 1 1 √ √ √ 2 2 2 0 0 0 ∠G(jω) ∠G(jω) ∠G(jω) ∠G(jω) ∠G(jω) 0 0 0 ◦ ◦ −45 ◦ ◦ −45 −45 ◦ ◦◦ ◦ −90 −90 −90 " ### " # ' & G(jω) G(jω) ' G(jω) G(jω) 0.5 0.5 ω = 0 ω= =0 0 ω ω ω= = 1/T 1/T Time with Lag and Integrator: Time Delay Delay with with Lag Lag and and Integrator: Integrator: Time Delay −sT11 −sT ee−sT 1 G(s) G(s) = G(s) = G(s) s(1+ +sT sT22)) s(1 −jωT11 −jωT 1 ee−jωT G(jω)= = G(jω) G(jω) jω(1+ +jωT jωT222))) jω(1 jωT 1 11 −jωT −jωT −jωT 1 × |G(jω)|= =|e |e 1|||× 1 × |G(jω)| |G(jω)| !! "#"# 11 1 11 × × × $$$ |jω| |jω| |1+ +jωT jωT22 |jω| |1 2 |1 + jωT 2||| −jωT1 − ∠(jω) −∠(1 + jωT ) −jωT −jωT ∠G(jω) = ∠e 11$− ∠(jω) −∠(1 ∠G(jω) = ∠e jωT2222))) ∠G(jω) −∠(1+ +jωT jωT ∠G(jω) = !∠e "# ! "# !! "# "# $ "# $$ −!∠(jω) ! $ "# $ −ωT11 −ωT 90◦◦ 90 1 Clearly, as as ω ω→ →0 then |G(jω)| |G(jω)|→ →∞. ∞. But But this this is not enough Clearly, Clearly, then thisis isnot notenough enough Clearly, as ω → 00 then |G(jω)| → ∞. But this is not enough information to to sketch sketch the the Nyquist Nyquist diagram. diagram. Precisely how does information information sketch the Nyquist diagram.Precisely Preciselyhow howdoes does information to diagram. Precisely how does |G(jω)|→ →∞? ∞? To To answer answer this, this, we we use use Taylor series expansion |G(jω)| → ∞? |G(jω)| To answer this, we useaaaTaylor Taylorseries seriesexpansion expansion |G(jω)| Taylor series expansion aroundω ω= = 0. 0. around ω = around 0. around −jωT and 11 → 11− −jωT jωT11 and and 1→ ee−jωT 1/(jωT22++1) 1)→ → 11− −jωT jωT222,,, 1/(jωT 00 (1−−jωT jωT111)(1 )(1− −jωT jωT222))) )(1 − jωT (1 111 jωT111T = −(T (T111 + +T T222)))+ +jωT G(jω)→ → = − jωT TT222... (T + T + == ⇒⇒ G(jω) = − jω jω jω jω jω jω !! """ G(jω) G(jω) %% G(jω) −(T11++TT22)) −(T """" !!!! $ G(jω) $ G(jω) $ G(jω) G(jω) $ Second-order lag: Second-orderlag: lag: Second-order Second-order lag: 1 1 1 1 G(s) = G(s)= = G(s) G(s) = (1 + sT )(1 + sT (1+ +sT sT1111)(1 )(1+ +sT sT2222)))) (1 (1 + sT )(1 + sT 11 1 1 G(jω) = G(jω)= = G(jω) G(jω) = (1 + jωT )(1 + jωT (1+ +jωT jωT11 )(1+ +jωT jωT2222)))) (1 (1 + jωT )(1 + jωT 11)(1 11 1 1 ! ! ! ! |G(jω)| = |G(jω)|= =! ! |G(jω)| ! ! |G(jω)| = 222 11 2222 2222T +ω ω22 1 + ω T 22T + ω T + ω T 11 + ω 11+ + ω TT11 1 + ω T 11 2222 "" ## G(jω) ' &' G(jω) ∠G(jω)= =− −arctan(ωT arctan(ωT111))))− −arctan(ωT arctan(ωT222)) ∠G(jω) = − arctan(ωT − arctan(ωT ∠G(jω) ∠G(jω) = − arctan(ωT 1 − arctan(ωT 2 ω= =∞ ∞ ω |G(jω)| ∠G(jω) ∠G(jω) |G(jω)| ∠G(jω) |G(jω)| ω= =00 ω = ω = 00 ω ω=→ =→∞ ∞ ω =→ ∞ ω =→ ∞ ω 111 000 000 ◦ ◦ ◦ −180 −180 −180 """ ### & G(jω) G(jω) & % & G(jω) ω =00 0 ω ω== 6.1.1 Sketching Nyquist diagrams Unlike the Bode diagram, there are no detailed rules for sketching Nyquist diagrams. It suffices to determine the asymptotic behaviour as ω → 0 and ω → ∞ (using the techniques we have seen in the examples) and then calculate a few points in between. Note that if G(0) is a finite and non-zero, then the Nyquist locus will always start off by leaving the real axis at right angles to it. 1 If G(0) is infinite, due to the presence of integrators, then we must explicity find the first two terms of the Taylor series expansion of G(jω) about ω = 0, as in the example with a time delay, a lag and an integrator. 1 This is since G(j") = G(0) + j"G# (0) − "2 G## (0) − · · · ≈ G(0) + j"G# (0) 6.2 Feedback stability r̄ (s)+ − ē(s) Σ K(s) G(s) ȳ(s) r̄ (s)+ ≡ Closed-loop poles − ē(s) Σ L(s) ȳ(s) G(s)K(s) ≡ poles of 1 + G(s)K(s) ≡ roots of 1 + G(s)K(s) = 0 It is difficult to see how K(s) should be chosen to ensure that all the closed-loop poles are all in the LHP. But . . . Nyquist’sStability Stability Theorem allowsTheorem usto todeduce deduce closed-loop Nyquist’s Stability Theorem allows us to deduce closed-loop Nyquist’s Theorem allows us closed-loop Nyquist’s Stability allows us to deduce closed-loo properties: properties: properties: properties: G(s)K(s) G(s)K(s) G(s)K(s) , the location location of of the poles of , the the poles of , the location of11the poles of + G(s)K(s) G(s)K(s) + 1 + G(s)K(s) fromopen-loop open-loopproperties properties from open-loop properties from from open-loop properties frequency response response of the the return ratio ratio frequency of return frequency response of the return ratio L(jω) = = G(jω)K(jω). G(jω)K(jω). L(jω) L(jω) = G(jω)K(jω). Thebasic basicidea ideais is asfollows: follows: Negative feedback isused usedfeedback toreduce reduce the The basic idea is as follows: Negative feedback used to reduce the The as Negative feedback isis to The basic idea is as follows: Negative isthe used to re sizeof ofthe theerror errore(t) e(t)in inthe theabove abovefigures. figures.IfIf Ify(t) y(t)isis istoo toolarge large(i.e (i.e size of the error e(t) in the above figures. y(t) too large (i.e size size of error e(t) in the above figures. If y(t) is too larg greaterthan thanrrr(t)) (t))then thene(t) e(t) is isnegative, negative,which whichwill willtend tendto toreduce reducey(t) y(t) greater than (t)) then e(t) negative, which will tend to reduce greater greater thanis r (t)) then e(t) is negative, which willy(t) tend to re (providedthe thesigns signsof ofK(s) K(s)and andG(s) G(s)have havebeen beenchosen chosenappropriately). appropriately). (provided the signs of K(s) and G(s) chosen appropriately). (provided (provided the signs ofhave K(s)been and G(s) have been chosen appr However,for forany anyreal realsystem systemthe thephase phaselag lagfrom fromthe theinput inputto tothe the However, for any real system the phase lag from input the However, However, for any real system the the phase lagto from the input to output(−∠L(jω)) (−∠L(jω))will willtend tendto toincrease increasewith withfrequency, frequency,eventually eventually output (−∠L(jω)) will tend to increase with frequency, output output (−∠L(jω)) will tend to increase eventually with frequency, even ◦◦.. When ◦ reaching 180 Whenthis thishappens, happens, thenegative negativefeedback feedbackisis isturned turned ◦ . When reaching 180 this happens, the negative feedback turned reaching 180 . When the reaching 180 this happens, the negative feedback is intopositive positivefeedback. feedback.IfIfIfthe thegain gain|L(jω)| |L(jω)|has hasnot notdecreased decreasedto toless less into positive feedback. the gain |L(jω)| has not decreased less into into positive feedback. If the gain |L(jω)| hastonot decreased than111by bythis thisfrequency frequencythen theninstability instabilityof ofthe theclosed-loop closed-loopsystem systemwill will than by this frequency the closed-loop will than than 1 bythen this instability frequency of then instability of system the closed-loop s result. result. result. result. r If L(s) is stable , then: (either marginally or asymptotically) " " ! −1 L(jω) L(s) is 1 + L(s) asymptotically stable =⇒ L(s) " ! −1 −1 Σ e ! L(jω) L(s) is 1 + L(s) marginally stable =⇒ L(jω) L(s) is 1 + L(s) unstable =⇒ That is, the closed-loop system is stable if the Nyquist diagram of the return ratio doesn’t enclose the point “−1”. y 6.2.1 r Significance of the point “−1” Σ e y L(s) If the Nyquist locus passes through the point “−1”, i.e. L(j 1) = 1 for some 1 ! " then the closed-loop frequency response L(jω)/ 1 + L(jω) becomes infinite at that frequency, ie ! " L(jω1 )/ 1 + L(jω1 ) → ∞ This is not a good thing! In this case, if e(t) = cos( 1 t) then in steady-state we have # $ y(t) = |L(jω1 )| cos ω1 t + ∠L(jω1 ) = cos(⇥1 t + )= cos( 1 t) However e(t) = r (t) − y(t), which means that r (t) = e(t) + y(t) = cos(ω1 t) − cos(ω1 t) =0 That is, there is a sustained oscillation of the feedback system even when there is no external input! 6.2.2 Example: 6.2.2 Example: 6.2.2 6.2.2 Example: Example: Let Let Let Let Let 1 11 G(s) = K(s) = k, G(s) G(s)= = s 3333+ s 222+ 2s + 1 ,,, K(s) K(s)= =k, k, k, ss + +ss + +2s 2s+ +11 k kk = ⇒ L(s) = ... = ⇒ = ⇒ L(s) L(s)= = s3 = ⇒ 2 3 2 + + 2s + 11 +sss 2+ +2s 2s+ +1 ss 3+ The closed-loop poles are the roots The closed-loop The closed-loop poles Theclosed-loop closed-looppoles polesare arethe theroots roots of of The of kk 3 2 k 3 3 22 + 1 + s + s 2s + 1 + k = 0 = 0 ⇐ ⇒ + + 333 s + s + 2s + 1 + k = 0 = 0 ⇐ ⇒ 111+ s + s + 2s + 1 + k = 0 = 0 ⇐ ⇒ ! "# $$$ 2 2 ! "# ! "# 2 s + s + 2s + 1 3 2 + +sss ++2s 2s++11 sss + CLCE CLCE CLCE and the frequency response of the loop and the frequency andthe thefrequency frequencyresponse responseof ofthe the loop loop is: is: and is: k k k L(jω) == L(jω) L(jω)= L(jω) 33 + 2ω) + (−ω22 + 1) j(−ω j(−ω3 +2ω) 2ω)+ +(−ω (−ω + + 1) 1) j(−ω + √ √ √ √ At ω = 2, L(jw) isispurely purely real. That At ω = 2, L(jw) Atω ω= = 2, 2,L(jw) L(jw)is purelyreal. real. That That is is At is √ √ k √ kk √ √ 2 j) = L( √ √ = L( 2 j) = −k =−k L( √ √ = L( 2 j) = j(−2 22+ + j(−2 2 +2 2)− −2 +1 j(−2 22 2) 2) − 22+ + 11 1L( 2 j) 0 Imag Axis k=1 0 −1 Closed-loop step response 0 10 20 30 40 50 Nyquist diagram, k=1 2 2 −1 L(j 2) Imag Axis 1 0 −2 −2 L(j ) L−1 1 1 L(s) · 1 + L(s) s 0 −1 0 Real Axis 1 2 −1 = 0 10 20 30 2 40 Closed-loop poles are at the roots of s 3 + s 2 + 2s + 2 = 0, i.e. −1 −2 −2 −1 0 Real Axis 1 2 Closed-loop poles are at the roots of s 3 + s 2 + 2s + 2 = 0, i.e. 50 s = −0.0000 + 1.4142j, −0.0000 − 1.4142j, −1.0000 ⇥ =⇒ (because L(j 2) = 1, and so 1 + L(s) = 0 at s = j 2) X X X Closed-loop poles closed-loop system is marginally stable kk = = 0.8 0.8 22 Closed-loop Closed-loop step step response response Nyquist Nyquist diagram, diagram, k=0.8 k=0.8 22 11 ImagAxis Axis Imag 11 00 −1 −1 00 00 20 20 30 30 40 40 50 50 Closed-loop is asymptotically stable −1 −1 −2 −2 −2 −2 10 10 −1 −1 00 11 Real Real Axis Axis 22 3 2 Closed-loop Closed-loop poles poles are are at at the the roots roots of of ss 3 + +ss 2+ +2s 2s + +1.8 1.8 = =0, 0, i.e. i.e. ss = = −0.0349 −0.0349+ +1.3906j, 1.3906j, −0.0349 −0.0349− −1.3906j, 1.3906j, −0.9302 −0.9302 k = 1.2 k = 1.2 2 2 Nyquist diagram, k=1.2 Nyquist diagram, k=1.2 2 2 1 1 ImagAxis Axis Imag 1 1 0 0 −1 −10 0 0 0 10 10 20 20 30 30 40 40 50 50 Closed-loop is unstable −1 −1 −2 −2 −2 −2 Closed-loop step response Closed-loop step response −1 −1 00 11 Real Real Axis Axis 22 3 + s 2 + 2s + 2.2 = 0, i.e. Closed-loop poles are at the roots of s Closed-loop poles are at the roots of s 3 + s 2 + 2s + 2.2 = 0, i.e. ss = 0.0319++1.4377j, 1.4377j, 0.0319 0.0319 − 1.4377j, −1.0639 = 0.0319 − 1.4377j, −1.0639 kk = = 0.8 0.8 22 r e Σ Closed-loop Closed-loop step step response response Nyquist Nyquist diagram, diagram, k=0.8 k=0.8 22 11 ImagAxis Axis Imag 11 00 −1 −1 00 00 20 20 30 30 40 40 50 50 Closed-loop is asymptotically stable −1 −1 −2 −2 −2 −2 10 10 −1 −1 00 11 Real Real Axis Axis 22 3 2 Closed-loop Closed-loop poles poles are are at at the the roots roots of of ss 3 + +ss 2+ +2s 2s + +1.8 1.8 = =0, 0, i.e. i.e. ss = = −0.0349 −0.0349+ +1.3906j, 1.3906j, −0.0349 −0.0349− −1.3906j, 1.3906j, −0.9302 −0.9302 L(s) y k = 1.2 k = 1.2 2 2 r Nyquist diagram, k=1.2 Nyquist diagram, k=1.2 2 2 ImagAxis Axis Imag e Closed-loop step response Closed-loop step response 1 1 1 1 0 0 −1 −10 0 0 0 10 10 20 20 30 30 40 40 50 50 Closed-loop is unstable −1 −1 −2 −2 −2 −2 Σ −1 −1 00 11 Real Real Axis Axis 22 3 + s 2 + 2s + 2.2 = 0, i.e. Closed-loop poles are at the roots of s Closed-loop poles are at the roots of s 3 + s 2 + 2s + 2.2 = 0, i.e. ss = 0.0319++1.4377j, 1.4377j, 0.0319 0.0319 − 1.4377j, −1.0639 = 0.0319 − 1.4377j, −1.0639 L(s) y 6.3 Nyquist Stability Theorem (informal version) We can now give an informal statement of Nyquist’s stability theorem: “If a feedback system has an asymptotically stable return ratio L(s), then the feedback system is also asymptotically stable if the Nyquist diagram of L(jω) leaves the point −1 + j0 on its left”. This is unambiguous in most cases, and usually still works if L(s) has poles at the origin or is unstable. For completeness, a full statement of this theorem will be given later. Definition: We say that the feedback system (or closed-loop system) L(s) is asymptotically stable if the closed-loop transfer function 1 + L(s) L(s) is asymptotically stable, that is if all the poles of (i.e. the 1 + L(s) roots of 1 + L(s) = 0) lie in the LHP. 6.4 Gain and Phase Margins L(jω) encirling or going through the −1 point is clearly bad, leading to the closed-loop not being asymptotically stable. However, L(jω) coming close to −1 without encircling it is also undesirable, for two reasons: It implies that a closed-loop pole will be close to the imaginary axis and that the closed-loop system will be oscillatory. If G(s) is the transfer function of an inaccurate model, then the “true” Nyquist diagram might actually encircle −1. Gain and phase margins are widely used measures of how close the return ration L(jω) gets to −1. The gain margin measures how much the gain of the return ratio can be increased before the closed-loop system becomes unstable. The phase margin measures how much phase lag can be added to the return ratio before the closed-loop system becomes unstable. " ! −1 L(j Gain Margin = 1 ) Phase Margin = In this example we have θ = 35◦ and −α = −0.75. Hence Phase Margin = 35◦ and Gain Margin = 1/0.75 = 4/3. 6.4.1 " Gain and phase margins from the Bode plot |L(jω)| (dB) −1 −α 0dB L(jω) Gain Margin −10dB Gain Margin = ∠L(jω) 1 α Phase Margin = θ In this example we have θ = 35◦ and −α = −0.75. He Phase Margin = 35◦ and Gain Margin = 1/0.7 0◦ −180◦ θ log10 ω Phase Margin Gain Margin = 20log10 4/3 = 2.5dB. Phase Margin = 35◦ (as before) Hint: Given a Nyquist diagram of L(s) = kG(s) for k = 1, it is easy to find gain and phase margins for k ≠ 1 (just look at the “−1/k” point instead of “-1”). “−1/k” −0.75 −1 # " θ (=phase margin when k = 0.8) L(jω) If k = 0.8, as here, then Gain Margin= −1.25 −0.75 = 5/3 (= 4.4dB), and Phase Margin=80◦ . 6.5 Performance of feedback systems Good feedback properties ⇐⇒ “Small” sensitivity ! ! ! ! 1 ! ! ! ! ! 1 + L(jω) ! For 1) rejection of disturbances. d̄(s) L(s) ȳ(s) − 1 Transfer function Transfer function = with f/b withoutfunction f/b Transfer function Transfer 1 +1L(s) = × with f/b without f/b 1 + L(s) Plus, 2) reducing the effects of uncertainty. – if L(s) depends on an uncertain parameter λ (eg 1 L(s) = 2 ) then s + 2λs + 1 d L dλ 1 + L L ! 1+ "# L $ relative change in closed-loop = dL dL % (1 + L) × dλ − (L) × dλ (1 + L)2 L 1+L 1 = !1 + "# L$ S d L dλ L $ ! "# relative change in open-loop Good design aims for sensitivity reduction over an appropriate range of frequencies & & & & 1 & & & # 1 for ω < ω1 where Typically, by requiring that & & 1 + L(jω) & ω1 here denotes the desired control bandwidth. Fundamental limits on performance As described in Paper 5 (Linear Circuits) operational amplifiers are typically compensated so that their frequency response is similar to that of a pure integrator. Ideally they would have a transfer function G(s) = A/s or G(jω) = A/jω. With a feedback gain of B, this would mean that the feedback system has a phase margin of 90◦ , for any A and B (see page 4). " # $ G(jω) + − Σ A/s B " # # G(jω) In this case, the sensitivity function would be given by dB 0dB 1 s 1 = × . 1 + AB/s AB (1 + s/AB) AB log10 ω |S(jω)| However, any real op-amp (and, indeed, any real system) will inevitably have an attenuation rate of greater 20 dB/decade (and a phase lag of greater than 90◦ ) at high frequencies. In this case, the Bode sensitivity integral applies: This theorem will not be examined. Theorem: If both L(s) and 1/(1 + L(s)) are asymptotically stable, and L(jω) rolls off at a rate greater than 20 dB/decade, then " " !∞ " " 1 " " " dω = 0 20log10 " " 1 + L(jω) " 0 dB 0dB |S(jω)| ω this is sometimes called the “waterbed” effect. (from Gunter Stein’s Bode Lecture, CDC 1989) 6.5.1 The relationship between open and closed-loop frequency responses Ultimately what we are always interested in are properties of the closed-loop system, such as its frequency response and pole locations. The following plots are representative of a typical feedback system, and correspond to a feedback system with a Return Ratio of 2 L(s) = s(1 + s) As is typical, the feedback reduces the effect of disturbances at low frequencies, up to ω1 , as evident from the plot of Sensitivity S(jω). ω1 is defined here as the lowest frequency at which |S(jω)| = 1. The closed-loop system will respond to reference inputs at frequencies up to around ω2 , as evident from the plot of the Complementary Sensitivity T (jω). ω2 is defined here as the highest frequency at which |T (jω)| = 1. Between these frequencies both disturbances and reference signals are amplified (because of the “waterbed” effect). The actual value of the frequencies ω1 and ω2 , and the size of these peaks, can be determined directly from the open-loop frequency response. 1 A: |S(jω)| = |1+L(jω)| = 1 when |1 + L(jω)| = 1, which is when the distance from the point −1 to the Nyquist locus equals 1 (this is the point ω = ω1 overleaf). |L(jω)| B: |T (jω)| = |1+L(jω)| = 1 when |L(jω)| = |1 + L(jω)|, which is when the distance from the point −1 to the Nyquist locus equals the distance from the origin to the Nyquist locus (this is the point ω = ω2 overleaf). 1 C: |S(jω)| = |1+L(jω)| is maximized when |1 + L(jω)| is minimized, that is when the distance from the point −1 to the Nyquist locus is at a minimum. |L(jω)| D: The easiest way to find the maximum value of |T (jω)| = |1+L(jω)| is probably to try a few points around where |1 + L(jω)| is minimized. 2 Nyquist diagram of the return ratio L(s) = s(1+s) ω = ω2 −1 " "1" −0.5 ! 1 "1 + L(j "L(j 1 )" ω = ω1 L(jω) 1 )" ω 1 1.732 L(jω) −1 − j −.5 − .289j 1 1+L(jω) L(jω) 1+L(jω) j 1.5 + .866j 1−j −.5 − .866j L(jω) 1 Closed-loop frequency responses: S(jω) = 1+L(jω) , T (jω) = 1+L(jω) dB 0dB |T (jω)| |S(jω)| ω1 ω2 r̄ (s) + ē(s) L(s) Σ ω − d̄o (s) + + ȳ(s) Σ Note: this is not a Bode diagram, because it is for a closed-loop system, and Bode diagrams are always drawn for open-loop systems (the plant, controller, return ratio etc). Small gain and/or phase margins correspond to there being frequencies at which L(jω) comes close to the −1. We now see that this also corresponds to making |1 + L(jω)| small and hence there being resonant peaks in the closed-loop transfer functions. So, Small gain and/or phase margins are bad for robustness, and bad for performance. California PATH project V5 V4 V3 V2 V1 Block diagram Example: Vehicle Platooning Example: Vehicle Platooning Example: Vehicle Platooning Example: Vehicle Platooning Example: Vehicle Plat x ḡ(jω) e California PATH project V5 Σ carintrackse distance Each carcar in tracks to car carintracks to car car intr xto car e distance e distance e distance + xref xEach car tracks + xref Each + xref xto + xref xEach + xref Each Σ Σ Σ Σ front.ḡ(jω) front. ḡ(jω) front. ḡ(jω) front.ḡ(jω) front. − − − − − California PATH project V4 V3 V5 V2 V4 California PATH project V1 V3 V5 V2 California PATH project V4 V1 V3 V5 California PATH project V2 V4 V1 V3 V5 V2 V4 V1 V3 11 ȳȳii(s) (s)== (exp(−sτ (exp(−sτii))ūūii(s) (s)−−ūūi+1 (s)) i+1(s)) sα sα 1 ȳi (s) = (exp(−sτi )ūi (s) − ūi+1 (s)) sα ūūii(s) (s)==CCii(s)ē (s)ēii(s) (s)==CCii(s)(r̄ (s)(r̄ii(s) (s)−−ȳȳii(s)) (s)) 20 ūi (s) = Ci (s)ēi (s) = Ci (s)(r̄i (s) − ȳi (s)) 10 0 gain(dB) gain(dB) −10 −20 −30 −40 −50 −60 −3 −3 10 10 −2 −2 10 10 −1 10−1 10 rad/min rad/min 0 0 10 10 Teei+1 →e i+3 i+2 →eii 6.6 The Nyquist stability theorem (for asymptotically stable L(s)) On page 12 we gave an informal statement of the Nyquist stability criterion. The formal statement of the Nyquist stability theorem requires counting encirclements of the point −1: As before, we take L(s) to be the return ratio so that the closed-loop characteristic equation is 1 + L(s) = 0. We make the following simplifying assumption: L(s) is asymptotically stable This also guarantees that L(jω) is finite for all ω ( i.e. it has no jω-axis poles), and that L(∞) is finite (since L(s) must be proper – see Handout 4). Under this condition the “full” Nyquist diagram of L(jω), for −∞ < ω < +∞, is a closed curve (since L(j∞) = L(−j∞) = L(∞)). Note that, since (−jω) = (jω)∗ , it follows that L(−jω) = L(jω)∗ . So the section of the Nyquist locus for ω < 0 is the reflection in the real axis of the section for ω > 0. With this assumption we have: The Nyquist Stability Theorem (for stable L(s)) Consider a feedback system with an asymptotically stable return ratio L(s). In this case, the feedback system is L(s) asymptotically stable (i.e. 1+L(s) is asymptotically stable) if and only if the point −1 + j0 is not encircled by the “full” Nyquist diagram of L(jω), for −∞ < ω < +∞. 6.6.1 Notes on the Nyquist Stability Theorem: 1. Encirclements must be ‘added algebraically’. If there is 1 clockwise and 1 anticlockwise encirclement then they ‘add up’ to 0 encirclements. 2. L(s) often has one or more poles at 0 (due to integrators in the plant or the controller). The theorem still works, but one has to worry about what happens to the graph of L(jω) at ω = 0 – as the locus is no longer a closed curve. It can be shown that, if L(s) has n poles at the origin, then the Nyquist locus should be completed by adding a large n × 180◦ arc, in a clockwise direction. 3. If L(s) is unstable, and has np unstable poles, then the theorem must be modified as follows: “The feedback system is stable if and only if the ‘full’ Nyquist diagram encircles the point −1 + j0 np times in an anticlockwise direction.” 4. (This a repeat of the informal statement of the Nyquist stability criterion from page 12.) A potentially ambiguous statement of the theorem, but one which almost always works, is: “The feedback system is stable if the Nyquist diagram of L(jω) ‘leaves the point −1 + j0 on its left’ ”. This still works (usually) if there are poles at the origin or even if L(s) is unstable. This informal version of the theorem is adequate for the examples which follow, for any others that you will encounter on this course and indeed for any you are likely to encounter in practice. 2 1.5 1 3 ℑ(L(s)) 0.5 4 0 30 22 5 16 6 −0.5 7 10 −1 −1.5 −3 −2 −1 0 ℜ(L(s)) MotorPower = -35*WheelAngle - 0.3*WheelVelocity + 0.8*LeanAngle + 0.35*GyroValue 3 1.5 1 4 ℑ(L(s)) 0.5 30 0 5 −0.5 22 16 6 7 −1 10 −1.5 −3 −2 −1 0 ℜ(L(s)) MotorPower = (-35*WheelAngle - 0.3*WheelVelocity + 0.8*LeanAngle + 0.35*GyroValue ) *1.7 1.5 1 2 3 ℑ(L(s)) 0.5 4 0 30 5 22 16 6 7 10 −0.5 −1 −1.5 −3 −2 −1 0 ℜ(L(s)) MotorPower = (-35*WheelAngle - 0.3*WheelVelocity + 0.8*LeanAngle + 0.35*GyroValue ) *0.6 Examples: Formal application of Nyquist stability theorem. " −1 no encirlements of −1 L(s) is =⇒ 1 + L(s) asymptotically stable " ! −1 ! 2 clockwise encirclements of −1 L(s) is =⇒ 1 + L(s) unstable " −1 " ! 1 clockwise + 1 anticlockwise encirclement of −1 i.e. 0 net encirclements (note 1) L(s) =⇒ is 1 + L(s) asymptotically stable −1 ! no encirlements of −1 (note 2) L(s) =⇒ is 1 + L(s) asymptotically stable Examples: Informal application of the Nyquist stability theorem (based on note 4). " −1 -1 to left of locus L(s) =⇒ is 1 + L(s) asymptotically stable " ! −1 -1 to right of locus L(s) =⇒ is 1 + L(s) unstable ! " −1 -1 to left of locus L(s) is =⇒ 1 + L(s) asymptotically stable " ! −1 ! -1 to left of locus L(s) is =⇒ 1 + L(s) asymptotically stable Hence: the informal application of the Nyquist stability criterion works for all these cases.