Limitations to maximum sprinting speed imposed
advertisement

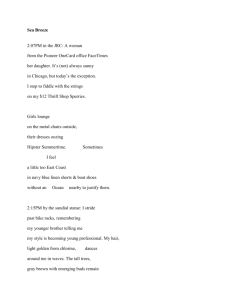
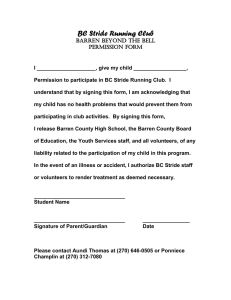
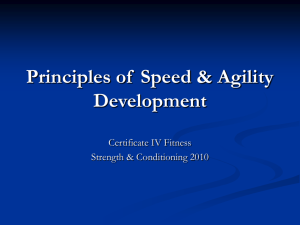
Journal of Biomechanics 45 (2012) 1092–1097 Contents lists available at SciVerse ScienceDirect Journal of Biomechanics journal homepage: www.elsevier.com/locate/jbiomech www.JBiomech.com Young Scientist Pre-doctoral Award 2010 Limitations to maximum sprinting speed imposed by muscle mechanical properties Ross H. Miller n, Brian R. Umberger, Graham E. Caldwell Department of Kinesiology, University of Massachusetts, Amherst, MA, USA a r t i c l e i n f o a b s t r a c t Article history: Accepted 12 April 2011 It has been suggested that the force–velocity relationship of skeletal muscle plays a critical limiting role in the maximum speed at which humans can sprint. However, this theory has not been tested directly, and it is possible that other muscle mechanical properties play limiting roles as well. In this study, forward dynamics simulations of human sprinting were generated using a 2D musculoskeletal model actuated by Hill muscle models. The initial simulation results compared favorably to kinetic, kinematic, and electromyographic data recorded from sprinting humans. Muscle mechanical properties were then removed in isolation to quantify their effect on maximum sprinting speed. Removal of the force– velocity, excitation–activation, and force–length relationships increased the maximum speed by 15, 8, and 4%, respectively. Removal of the series elastic force–extension relationship decreased the maximum speed by 26%. Each relationship affected both stride length and stride frequency except for the force–length relationship, which mainly affected stride length. Removal of all muscular properties entirely (optimized joint torques) increased speed (þ 22%) to a greater extent than the removal of any single contractile property. The results indicate that the force–velocity relationship is indeed the most important contractile property of muscle regarding limits to maximum sprinting speed, but that other muscular properties also play important roles. Interactions between the various muscular properties should be considered when explaining limits to maximal human performance. & 2011 Elsevier Ltd. All rights reserved. Keywords: Sprinting Speed Limits Muscle Force–velocity 1. Introduction Sprinting has a long history of research in biomechanics and human movement science (Furusawa et al., 1927a,b; Best and Partridge, 1928; Hill, 1928). Sprinting abilities vary widely among individuals, but all runners have a maximum sprinting speed that they cannot exceed. Here we define the maximum sprinting speed as the fastest steady speed attained during the ‘‘plateau’’ phase of a sprint, when the average speed over one stride is relatively constant from stride to stride. Several investigators have studied mechanical factors that influence the maximum sprinting speed. While both stride length and stride frequency increase as speed increases from a slow jog to a maximum sprint, the stride length plateaus at a moderate speed, and the stride frequency increases up until the maximum speed (Luhtanen and Komi, 1978). Greater stride frequencies require the legs to move through the stride cycle at faster rates, and the muscles to shorten and lengthen more rapidly. This finding has directed attention on the well-known force–velocity n Correspondence to: Department of Mechanical & Materials Engineering, 319 McLaughlin Hall, Queen’s University, Kingston, ON, K7L 3N6, Canada. Tel.: þ1 613 549 6666; fax: þ 1 613 549 2529. E-mail address: rosshm@gmail.com (R.H. Miller). 0021-9290/$ - see front matter & 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.jbiomech.2011.04.040 relationship of skeletal muscle (Hill, 1938; Katz, 1939) as the potential ‘‘bottleneck’’ that ultimately limits maximum sprinting speed (Chapman and Caldwell, 1983; Weyand et al., 2010). Measurements or estimates of force–velocity parameters in vivo correlate with training-induced improvements in sprint performance (Cormie et al., 2010), distinguish between the muscles of sprint athletes and other individuals (Thorstensson et al., 1977), and are better predictors of sprint performance than measures of isometric strength (Kukolj et al., 1999). These findings motivate the question of how fast humans could run if there was no force–velocity relationship. An isolated property of skeletal muscle cannot be adjusted or removed in vivo, but computer simulations can be used to investigate these effects. In forward dynamics computer simulations, the force–velocity relationship and other muscle mechanical properties have been shown to influence the performance of walking (Gerritsen et al., 1998), running (Sellers et al., 2010), pedaling (Van Soest and Casius, 2000), and jumping (Van Soest and Bobbert, 1993). Because sprinting speed is the product of both stride length and stride frequency, the maximum speed is ultimately limited by both variables. It is unknown how the mechanical properties of muscle, such as the force–length and force–velocity relationships, influence the maximum stride length and frequency, and therefore the maximum sprinting speed. R.H. Miller et al. / Journal of Biomechanics 45 (2012) 1092–1097 Therefore, the purpose of the study was to determine the extent to which individual muscle mechanical properties affect the maximum sprinting speed and the stride length/frequency combination used to run at that speed. The approach taken was to remove specific mechanical properties from the dynamics of neuromuscular force production and observe the resulting effects on the simulated sprint performance. We hypothesized that removing the force–velocity relationship would have the greatest effect on maximum sprinting speed compared to other muscular properties. 2. Methods 2.1. Experimental data Twelve adult females (mean 7 sd: age¼ 27 76 years, height ¼1.66 7 0.05 m, mass¼ 61.07 4.7 kg) participated as subjects after providing informed consent to protocols approved by the university institutional review board. Each subject performed five trials of maximal effort sprinting along a 40-m runway while reflective marker positions, ground reaction forces (GRF), and surface electromyograms (EMG) were sampled from one stride near the middle of the runway. Marker positions were lowpass filtered (Butterworth, 4th order recursive) at 12 Hz and used to calculate joint and segment angles. GRF were lowpass filtered at 75 Hz. EMG were bandpass filtered (20–300 Hz), detrended, rectified, then lowpass filtered at 5 Hz to calculate linear envelopes. Linear envelopes were scaled by their maximum values recorded during maximum isometric contractions. Data were averaged over trials, then over subjects. 2.2. Computer model Sprinting was simulated using a 2D bipedal model of the human musculoskeletal system (Fig. 1). The skeleton had nine rigid segments and 18 Hill-based muscle models (nine per leg). Muscle activation and contractile dynamics, along with details on muscle-specific parameters, are presented in the Electronic 1093 Supplementary Material. Each muscle was controlled by an excitation signal that was a periodic, piecewise linear function of 21 nodal values spaced evenly over the time for one stride. Excitations to the right and left sides were identical but phaseshifted by 50%. Passive restoring torques restricted the joints to realistic ranges of motion (Riener and Edrich, 1999). Ground contact elements beneath the heel, toe, and metatarsophalangeal (MTP) joint of each foot generated the vertical (Fgc y) and horizontal (Fgc x) ground reaction forces: 3 F gcy ¼ Agc 9ygc 9 exp ðBgc y_ gc Þ F gcx ¼ mF gcy tanh x_ gc g ð1Þ ð2Þ where xgc and ygc are the horizontal and vertical positions of the contact element (ygc ¼0 at the ground). The contact model parameters were Agc ¼ 2.5E þ 08 N m 3, Bgc ¼ 0.85 N s m 1, m ¼ 0.8, and g ¼ 0.1 m s 1. The supportive effect of arm swing (Hinrichs et al., 1987) was modeled as a vertical force Farms at the shoulder: 4pt farms ð3Þ F arms ¼ Aarms sin tf where Farms and farms are, respectively, the amplitude and phase shift of the arm swing force, tf is the stride duration, and t is time. 2.3. Simulations Simulations of one step were generated by optimizing the model’s control variables to maximize the objective function J: J¼ DxCoM tf ð0:01ey þ 0:0001eo þ 0:001epas þ egrf Þ ð4Þ where DxCoM is the change in horizontal position of the center of mass and the bracketed terms are penalties. The penalty weighting coefficients were explored in preliminary simulations and set to the smallest values that produced nearly periodic strides. ey and eo were the sums of the squared differences between the initial and final segment angular positions and velocities, respectively, and encouraged periodic kinematic states. epas was the sum of the integrals of the squared passive joint moments, and discouraged joint hyperextension. egrf was the ratio between the absolute braking and propelling impulses of the horizontal GRF component, with the larger impulse in the numerator, minus one to make the optimal value zero, and encouraged steady speeds. Data for one complete stride were reconstructed from one step by assuming bilateral symmetry (Anderson and Pandy, 2001). Optimizations were performed using a parallel simulated annealing algorithm (Higginson et al., 2005) that required about 3,000,000 function calls and 1.5 days to generate each simulation. 2.3.1. Control variables The control variables were 180 independent muscle excitation nodes (10 per muscle per step), the initial linear and angular velocities, the amplitude and phase shift of Farms, the angular stiffness of the MTP joint, and the stride duration. The initial angular velocities were bounded to be within 7 1 between subjects’ standard deviation of the mean values from the experimental data at initial ground contact of the right foot. The stride duration was also bounded between 7 1 between subjects’ standard deviation. The arm swing force’s amplitude could not exceed 25% of the model’s weight (Miller et al., 2009) and the MTP stiffness could not exceed 300 Nm per rad s 1 (Stefanyshyn and Nigg, 1997). 2.3.2. Initial conditions The initial angular positions were specified as the mean experimental values from initial ground contact of the right foot. The initial horizontal hip position was arbitrary, and the initial vertical hip position was set to the lowest value that gave a vertical GRF of zero. The initial muscle model activations were calculated by solving the equations for excitation–activation coupling over the time for one stride. The initial muscle model CC lengths were calculated by assuming the CC was isometric at the initial muscle length and activation. Fig. 1. Diagram of the 2D computer model used to simulate sprinting. The model included nine segments (trunk, thighs, legs, feet, and toes) and nine muscles per leg (Iliopsoas, glutei, vasti, biceps femoris (short head), tibialis anterior, soleus, rectus femoris, hamstrings, and gastrocnemius). Farms represented the kinetic effect of arm swing. 2.3.3. Muscle mechanical properties The optimization was performed six different times with six different muscle model definitions. In the first optimization, the full muscle model was used. In the second, third, and fourth optimizations, the bounds on the initial linear and angular velocities were increased to 7 3 standard deviations, and the force– length, force–velocity, and excitation–activation relationships of the CC were, respectively, removed in isolation (i.e. each simulation was missing one specific relationship). In the fifth optimization, the SEC force–extension relationship was removed, while all of the CC relationships were retained. Fig. 2 shows graphical examples of how the muscle mechanical properties were adjusted; see the Electronic Supplementary Material for details. In the sixth optimization, the joint torques were optimized directly, with no consideration for muscular dynamics. Like the muscle excitations, the joint torque histories were parameterized by 21 nodal values and smoothed by a sixth-order polynomial prior to applying the Hip (deg) Horiz. GRF (bw) Vert. GRF (bw) R.H. Miller et al. / Journal of Biomechanics 45 (2012) 1092–1097 Knee (deg) 1094 Ankle (deg) Stride (%) Stride (%) Fig. 3. Joint angles and GRF components vs. the stride cycle from the human subjects (dashed lines) and the initial simulation (solid lines). Shaded area is 72 between subjects’ standard deviations around the mean of the human subjects. The stride begins and ends at initial contact of the right foot. Fig. 2. Changes made to the muscle mechanical properties to remove their influence from the simulations. FV ¼ CC force–velocity relationship; FL¼ CC force–length relationship; EA ¼CC excitation–activation relationship; FE ¼ SEC force–extension relationship. torques to the skeleton. The maximum permitted torques were set by calculating the products of the muscle maximum isometric forces times their maximum moment arms, and summing these products over all muscles spanning each joint. 2.4. Evaluation The primary outcome variables of the simulations were the average horizontal speed of the center of mass, the stride length, and the stride frequency. We also examined how forces produced by the muscle models were affected when the force–velocity relationship was removed. 3. Results When all muscle mechanical properties were included, the model sprinted at 6.75 m s 1, which was 5% faster than the subjects (6.4270.61 m s 1 on average). The model’s stride length and frequency (3.39 m and 1.99 Hz) were, respectively, 6% longer and 1% lower than the means of the subjects (3.2170.30 m and 2.0170.24 Hz). The simulated joint angles and GRF usually fell within two standard deviations of the mean experimental data (Fig. 3) even though tracking of these data was not part of the optimization problem. The cross-correlations between the muscle model activations and linear envelopes (Fig. 4) averaged 0.60 (range 0.19–0.95). For comparison, cross-correlations between the linear envelopes for the human subjects (i.e. every subject compared to every other subject) averaged 0.65 (range 0.26–0.98). Removing any of the CC muscle mechanical properties increased the model’s maximum sprinting speed, while removing the SEC force–extension relationship reduced speed (Fig. 5). Removing the force–velocity relationship had the greatest effect among the three CC properties: speed increased by 15% to 7.76 m s 1, with a 5% increase in stride length and a 9% increase in stride frequency. Removing the force–length relationship increased speed by 4%, due almost entirely to an increase in stride length. Removing the excitation–activation relationship increased speed by 8%, with a 2% increase in stride length and a 6% increase in stride frequency. The greatest effect on speed was produced by removing the SEC force–extension relationship, which decreased the sprinting speed by 26% to 5.00 m s 1, accompanied by 14% decrease in stride length and a 13% decrease in stride frequency. In this simulation, the periodicity penalty terms were three times larger than any other simulation (average deviations of 111 and 671 s 1, compared to 2.81 and 221 s 1 for the other simulations), indicating that the allowed bounds on the initial state were outside the model’s ability to perform a periodic stride. When all muscle mechanical properties were removed (joint torques optimized), the speed increased by 22% to 8.24 m s 1, with an 8% increase in stride length and a 13% increase in stride frequency. The effect of the force–velocity relationship on the abilities of muscles to produce force is seen in Fig. 6. Removing the force– velocity relationship increased the average force by at least 130 N for every muscle but gastrocnemius. The greatest absolute increases in average force were seen in iliopsoas (802 N), glutei (644 N), and vasti (543 N) while the smallest were in gastrocnemius (26 N), tibialis anterior (130 N), and rectus femoris (152 N). The greatest relative increases in average force (scaled by maximum isometric force) were seen in iliopsoas (35%), biceps femoris (23%), and glutei (16%) while the smallest were seen in gastrocnemius (1%), soleus (3%), and tibialis anterior (5%). For muscles that showed a distinct force peak within the stance phase, the peak occurred later in stance for glutei (4% of the stride), vasti (7%), biceps femoris (14%), and gastrocnemius (4%). These results indicate that removal of the force–velocity relationship affected both the magnitude and timing of muscular force production. R.H. Miller et al. / Journal of Biomechanics 45 (2012) 1092–1097 1.0 0.5 0 0 25 50 75 100 1.0 0.5 25 50 75 100 SOL 0 0 25 50 75 100 25 50 75 100 0 25 50 75 100 1.0 0.5 0 0 0.5 25 50 75 100 1.0 0.5 25 50 75 100 0 0 1.0 0 1.0 0 0 0.5 0 25 50 75 100 HAM 0.5 0 TA 0 1.0 BF VAS 0.5 GAS 0 1.0 RF GLU ILP 1.0 1095 0.5 0 25 50 75 100 0 Stride (%) Stride (%) Stride (%) EMG linear envelope Model excitation Model activation Fig. 4. Optimized muscle excitations (thin lines), activations (thick lines), and EMG linear envelopes (dashed lines) for the sprinting simulation. ILP ¼iliopsoas; GLU ¼glutei; VAS ¼ vasti; BF¼ biceps femoris (short head); TA ¼ tibialis anterior; SOL ¼soleus; RF¼ rectus femoris; HAM¼ hamstrings; GAS ¼gastrocnemius. The stride begins and ends at heel-strike. Vertical dashed lines indicate toe-off. Linear envelopes were scaled by values from maximum isometric contraction. No EMG data were available for ILP and BF. 4. Discussion Speed (ms-1) 10 8 6 4 2 0 All No FV No FL No EA No FE None All No FV No FL No EA No FE None All No FV No FL No EA No FE Muscular Properties None 4 SL (m) 3 2 1 0 SF (Hz) 3 2 1 0 Fig. 5. (a) Speeds, (b) stride lengths, and (c) stride frequencies from the sprinting simulations with various muscular properties removed. FV, FL, EA, and FE are the force–velocity, force–length, excitation–activation, and force–extension relationships, respectively. Horizontal dashed lines indicate values from the initial simulation that included all muscular properties. In this study, computer simulations were used to quantify the effects of muscle mechanical properties on maximum sprinting speed. Removing CC properties enabled faster speeds, while removing the SEC force–extension relationship greatly impaired speed. The changes in speed resulted from modifications in both stride length and the stride frequency, except for removal of the force–length relationship, which primarily altered stride length. Concurrent changes in stride length and stride frequency would be expected to alter both the timing and magnitude of muscular force production, as seen in Fig. 6 when the force–velocity relationship was eliminated. For the individual muscular properties, the greatest increase in speed was seen when the force–velocity relationship was removed ( þ15%). This finding supports the contention made in several previous studies that the force–velocity relationship is a critical limiting factor in sprint performance (Chapman and Caldwell, 1983; Weyand et al., 2000, 2010). However, removal of the other CC properties also increased the maximum sprinting speed ( þ8% for excitation–activation; þ 4% for force–length). Even a 4% difference in maximum speed would have a major effect on the outcome of a 100- or 200-m race. Further, when all muscular dynamics were eliminated and the model was actuated by optimized joint torques, the maximum speed increased to the fastest speed observed in any simulation ( þ22%). Removal of CC properties increases speed because they limit the potential kinematic states at which muscles can develop large forces. The largest forces can be generated only when the CC is near optimal length in isometric or eccentric conditions. Removing all muscular properties increased speed to a greater extent ( þ22%) than removing any individual contractile property ( þ4, þ8, and þ15%), but the increase was less than the sum of these individual effects ( þ27%). This result suggests that the speed-limiting effects of CC properties interact with each other. Interactions between the force–velocity relationship and other muscular properties R.H. Miller et al. / Journal of Biomechanics 45 (2012) 1092–1097 4000 2000 0 6000 6000 4000 4000 2000 6000 4000 4000 2000 2000 0 0 0 25 50 75 100 6000 4000 2000 0 0 25 50 75 100 6000 4000 4000 SOL 6000 0 0 25 50 75 100 HAM 6000 2000 0 0 25 50 75 100 BF VAS 2000 0 0 25 50 75 100 TA RF GLU ILP 6000 0 25 50 75 100 6000 GAS 1096 2000 0 4000 2000 0 0 25 50 75 100 0 25 50 75 100 0 25 50 75 100 Stride (%) Stride (%) Stride (%) Fig. 6. Muscle forces (in newtons) during the stride cycle (heel-strike at 0% and 100%; toe-off indicated by vertical dashed lines). Broken lines from sprinting simulation with all muscle mechanical properties (speed ¼ 6.75 m s 1). Solid lines from sprinting simulation with the force–velocity property removed (speed ¼7.76 m s 1). Muscle key: ILP ¼ Iliopsoas, GLU ¼glutei, RF¼ rectus femoris, VAS ¼vasti, BF¼ biceps femoris (short head), HAM ¼hamstrings, TA ¼ tibialis anterior, SOL ¼soleus, and GAS ¼gastrocnemius. should thus be considered when seeking to explain limits to maximal performance within the muscular system. An example of muscular property interaction is seen when the SEC force–extension relationship is removed. In contrast to the CC properties, removing the SEC force–extension relationship substantially reduced the model’s maximum sprinting speed ( 26%). Sellers et al. (2010) recently reported a similar result. Under normal conditions, SEC compliance allows the SEC to take up a portion of the change in total muscle length, which facilitates the storage and utilization of elastic strain energy (Cavagna, 1977; Jacobs et al., 1993) and enables the CC to operate at slow shortening velocities (Alexander, 2002). Without a compliant SEC, the CC must shorten at faster velocities, which impair force production. These interactions predict that muscles with long tendons and short muscle fascicles (e.g. gastrocnemius) should be able to produce force economically with its fibers remaining relatively isometric even during fast dynamic movement when the whole muscle changes length quickly, as others have suggested (Morgan et al., 1978). This state has been observed in human gastrocnemius during both experimental (e.g. Lichtwark et al., 2007) and simulation (e.g. Hof et al., 2002) studies of running, and was also observed in the present study. In simulations with the force–velocity relationship removed, gastrocnemius force production was essentially unaffected (Fig. 6) because its force–extension relationship allowed the muscle to shorten at a slow velocity in both cases. Even when all muscle mechanical properties were removed, the model did not achieve unrealistically fast speeds. The fastest steady speed of the model over one stride was 8.24 m s 1. Elite sprinters can greatly exceed this speed. Florence Griffith-Joyner’s average speed during her entire world record 100-m dash performance was 9.53 m s 1. The missing explanatory variable is muscular strength. In a sensitivity analysis, we found that the maximum isometric muscle strengths needed to be doubled in order for the model to achieve world-class speeds. With no muscular dynamics (joint torque optimization), the model can achieve super-human speeds if the maximum joint torque bounds are removed. Here the speed is limited entirely by non-muscular factors, such as the mass and inertia of the limbs, joint ranges of motion, and the allowed ranges for the stride duration and initial conditions. Although tempting, it is difficult to make conclusions on sprint training from the present results since we did not manipulate the muscular properties over a physiological range. However, the results could be interpreted as an indication that the ability to generate force at a variety of muscle velocities (power) is more important for sprinting speed than the ability to generate force at a variety of muscle lengths (flexibility). It is also important to consider that the model is a greatly reduced analog of the full human neuro-musculo-skeletal system, and is therefore subjected to some limitations. The model was 2D and any dynamics related to the medial–lateral and transverse planes (and any interactions between these planes and the sagittal plane) were neglected. The model lacked explicit arm segments, although the arm swing force is intended to represent the net kinetic effect of arm swing on supporting the center of mass (Hinrichs et al., 1987). The role of the arms in balancing the transverse angular momentum of the legs (Hinrichs, 1987) is unnecessary in this 2D model. Finally, the model’s state equations are too complex to derive an analytical solution, and there is no assurance that the optimization algorithm located the global maximum of the solution domain. However, the solution space was searched extensively ( 3 million solutions evaluated per simulation) and repeated optimization runs with different random number generator seeds converged to essentially the same solutions. We are therefore confident that the solutions presented are very near the global ‘‘maximum speed’’ solutions. In conclusion, the force–velocity relationship had the greatest limiting effect on maximum speed among the contractile properties of muscle. This result supports previous theories that the force– velocity relationship plays a critical limiting role in the achievement of maximum sprinting speed. However, other muscular properties, in particular the force–extension relationship of the SEC, also affect the maximum speed. Interactions between these properties should be considered when explaining limits to human muscular performance. Different theories on specifically how and when the force– velocity relationship limits sprinting speed have been posed in R.H. Miller et al. / Journal of Biomechanics 45 (2012) 1092–1097 experimental studies (Chapman and Caldwell, 1983; Weyand et al., 2000). Investigating these theories will be a direction for future work. Other possible unexplored topics include the removal of CC/ SEC properties from individual muscles, altering property-defining parameters within a physiological range rather than removing them, and strengthening individual muscles for training implications. Electronic Supplementary Material The Electronic Supplementary Material on the journal’s website includes a description of the muscle model, the algorithm used to calculate muscle forces and rates of change in activation and CC length, and the assignment of muscle-specific parameters. In addition, a description of how the muscle mechanical properties were removed is provided. Conflict of interest statement The authors have no personal or financial conflicts of interest related to publication of the present work. Acknowledgments The authors would like to thank the American Society of Biomechanics for their consideration and for the opportunity to present our work. Appendix A. Supplementary materials Supplementary materials associated with this article can be found in the online version at doi:10.1016/j.jbiomech.2011.04.040. References Alexander, R.M., 2002. Tendon elasticity and muscle function. Comparative Biochemistry and Physiology A 133, 1001–1011. Anderson, F.C., Pandy, M.G., 2001. Dynamic optimization of human walking. Journal of Biomechanical Engineering 123, 381–390. Best, C.H., Partridge, R.C., 1928. The equation of motion of a runner, exerting maximal effort. Proceedings of the Royal Society of London B 103, 218–225. Cavagna, G.A., 1977. Storage and utilization of elastic energy in skeletal muscle. Exercise and Sport Sciences Reviews 5, 89–129. Chapman, A.E., Caldwell, G.E., 1983. Kinetic limitations of maximal sprinting speed. Journal of Biomechanics 16, 79–83. Cormie, P., McGuigan, M.R., Newton, R.U., 2010. Adaptations in athletic performance after ballistic power versus strength training. Medicine and Science in Sports and Exercise 42, 1582–1598. Furusawa, K., Hill, A.V., Parkinson, J.L., 1927a. The dynamics of sprint running. Proceedings of the Royal Society of London B 102, 29–42. 1097 Furusawa, K., Hill, A.V., Parkinson, J.L., 1927b. The energy used in sprint running. Proceedings of the Royal Society of London B 102, 43–50. Gerritsen, K.G.M., van den Bogert, A.J., Hulliger, M., Zernicke, R.F., 1998. Intrinsic muscle properties facilitate locomotor control—a computer simulation study. Motor Control 2, 206–220. Higginson, J.S., Neptune, R.R., Anderson, F.C., 2005. Simulated parallel annealing within a neighborhood for optimization of biomechanical systems. Journal of Biomechanics 38, 1938–1942. Hill, A.V., 1928. The air resistance to a runner. Proceedings of the Royal Society on London B 102, 380–385. Hill, A.V., 1938. The heat of shortening and the dynamic constants of muscle. Proceedings of the Royal Society on London B 126, 136–195. Hinrichs, R.N., Cavanagh, P.R., Williams, K.R., 1987. Upper extremity function in running—I: center of mass and propulsion considerations. International Journal of Sport Biomechanics 3, 222–241. Hinrichs, R.N., 1987. Upper extremity function in running—II: Angular momentum considerations. International Journal of Sport Biomechanics 3, 242–263. Hof, A.L., van Zandwijk, J.P., Bobbert, M.F., 2002. Mechanics of human triceps surae muscle in walking, running and jumping. Acta Physiologica Scandinavica 174, 17–30. Jacobs, R., Bobbert, M.F., van Ingen Schenau, G.J., 1993. Function of mono- and biarticular muscles in running. Medicine and Science in Sports and Exercise 25, 1163–1173. Katz, B., 1939. The relation between force and speed in muscular contraction. Journal of Physiology 96, 45–64. Kukolj, M., Ropret, R., Ugarkovic, D., Jaric, S., 1999. Anthropometric, strength, and power predictors of sprinting performance. Journal of Sports Medicine and Physical Fitness 39, 120–122. Lichtwark, G.A., Bougoulias, K., Wilson, A.M., 2007. Muscle fascicle and series elastic element length changes along the length of human gastrocnemius during walking and running. Journal of Biomechanics 40, 157–164. Luhtanen, P., Komi, P.V., 1978. Mechanical factors influencing the running speed. In: Asmussen, E., Jørgensen, K. (Eds.), Biomechanics VI, University Park Press, Baltimore, pp. 23–29. Miller, R.H., Caldwell, G.E., van Emmerik, R.E.A., Umberger, B.R., Hamill, J., 2009. Ground reaction forces and lower extremity kinematics when running with suppressed arm swing. Journal of Biomechanical Engineering 131, 124502. Morgan, D.L., Proske, U., Warren, D., 1978. Measurements of muscle stiffness and the mechanism of elastic storage of energy in hopping kangaroos. Journal of Physiology 282, 253–261. Riener, R., Edrich, T., 1999. Identification of passive elastic joint moments in the lower extremities. Journal of Biomechanics 32, 539–544. Sellers, W.I., Pataky, T.C., Caravaggi, P., Crompton, R.H., 2010. Evolutionary robotic approaches in primate gait analysis. International Journal of Primatology 31, 321–338. Stefanyshyn, D.J., Nigg, B.M., 1997. Mechanical energy contribution of the metatarsophalangeal joint to running and sprinting. Journal of Biomechanics 30, 1081–1085. Thorstensson, A., Larsson, L., Tesch, P., Karlsson, J., 1977. Muscle strength and fiber composition in athletes and sedentary men. Medicine and Science in Sports 9, 26–30. Van Soest, A.J., Bobbert, M.F., 1993. The contribution of muscular properties in the control of explosive movements. Biological Cybernetics 69, 195–204. Van Soest, A.J., Casius, L.J.R., 2000. Which factors determine the optimal pedaling rate in sprint cycling? Medicine and Science in Sports and Exercise 32, 1927–1934. Weyand, P.G., Sternlight, D.B., Bellizzi, M.J., Wright, S., 2000. Faster top running speeds are achieved with greater ground forces not more rapid leg movements. Journal of Applied Physiology 89, 1991–1999. Weyand, P.G., Sandell, R.F., Prime, D.N., Bundle, M.W., 2010. The biological limits to running speed are imposed from the ground up. Journal of Applied Physiology 108, 950–961.