Lesson 12 Sequential Circuits: Flip
advertisement

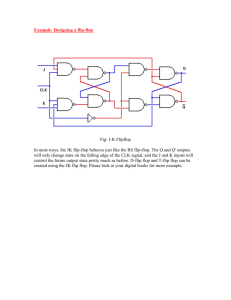
Lesson 12 Sequential Circuits: Flip-Flops 1. Overview of a Synchronous Sequential Circuit We saw from last lesson that the level sensitive latches could cause instability in a sequential system. This instability can be reduced by adding a control/enable signal throughout the system, with each latch only permitted to switch states when enabled. This single enable signal, which periodically activates, thereby enabling all of the devices at the same instant, ensuring that all state shifts are synchronized, is called a clock signal. A system of sequential elements that all change their states at the same time is termed synchronous systems. A general block diagram of a synchronous sequential system is shown below. From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition In a synchronous system, all memory elements (flip flops) can change state only once per periodic clock signal, and no elements can alter their states between clock signals. Clock signals, such as those shown below, are periodic signals characterized by two values. From A. Marcovitz, Introduction to Logic Design, McGraw Hill, 2010 • The period, T, which is the length of one cycle. • The frequency of the clock is defined as 1 . • The duty cycle, which is the percentage of the period that the clock signal is active (i.e., 1 for active high, 0 for active low). 1 T The two signals above have the same period but different duty cycles. Do you think that we want clocks to have a high frequency or a low frequency (or it doesn’t matter)? High frequency! All computer operations are based on state changes. State changes only occur once per clock cycle. The more clock cycles per second, the more state changes per second, and the more a computer can do per second. As we saw from the previous lesson, the SR latch with an enable signal will respond to the input signals when the enable single is active (level sensitive). The problem with this while the enable signal is active, the latch will respond to new input values and a new output may occur. This leads to unpredictable situation since the state of the latches may keep changing due to the different propagation delay of the input signals. The key to proper operation in a sequential system is that all the elements should change state at the same time during the clock signal transition. These transitions are known as clock edges. Example of the level response, positive edge (or rising edge = 0 to 1 transition) response, and negative edge (or falling edge = 1 to 0 transition) response are shown below. From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition Memory elements that operate based on clock signal transitions are call edged-triggered flip-flops. In this lesson, we will look at three types of flip flops: • • • D flip-flop JK flip-flop T flip-flop 2. D Flip Flop 2 As mentioned in the previous lesson, the SR latches are rarely used in practical applications but they are the building blocks for flip-flops. The construction of a D flip-flop based on two D latches is shown below. From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition When the clock is 1, the output Y of the master latch is set to the correct value (based on the input value of D), and this value is then passed to the output Q via the second latch, the slave, when the clock goes from 1 to 0. This is termed a negative-edge triggered D flip-flop since the output of the device changes when the clock goes from 1 to 0. Note that the change in the output of the flip-flop can only be triggered by and during the transition of the clock (e.g. negative/falling edge in the above block diagram). For example, once the clock has transitioned to the negative level, the master latch is disabled; hence the output Y of the master latch will remain stable regardless of the input D. Therefore, the output Q of the flip-flop will also remain stable. Notes: • There is a minimum time called the setup time during which the input D must stay constant right before the clock edge. • There is also a minimum time called the hold time during which the input D must stay constant right after the clock edge. • There is a propagation delay associated with a flip-flop which is defined as the time interval between the active clock edge and the stabilization of the output. • All of these parameters are specified in the device datasheet produced by the manufacturers. • For timing analysis in this class, we will only consider the propagation delay. Symbol The logic symbols for positive-edge and negative-edge triggered D flip-flop are shown below. 3 From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition Characteristic Table Characteristic tables are used to define the operations of the flip-flops. For a D flip-flop, we consider the input D at time t = 0 and the output will be Q after the circuit delay (next state). We will denote the next state as Q(t+1). Write the state table for the D flip-flop: From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition So, in summary, what does the D flip flop do? The input at D shows up as the output Q at the next active clock transition. Put another way The next state of the D flip flop is equal to the value of D before the clock transition. Characteristic Equation The function of a D flip-flop can also be described as Q(t+1) = D which states that next state of the output will be equal to the value of the input D after the clock transition. Timing Diagram Another way to illustrate the behavior of the D flip flop is to use a timing diagram. The important point: evaluate the output of the each flip-flop based on the current input right before the active clock edge (e.g. negative/falling edge). 4 Example. Sketch the output Q of a negative-edge triggered D flip flop whose inputs are shown below. Q From A. Marcovitz, Introduction to Logic Design, McGraw Hill, 2010 Example. Sketch the output Q of a positive-edge triggered D flip flop whose inputs are shown below. Q From A. Marcovitz, Introduction to Logic Design, McGraw Hill, 2010 Example. Consider the circuit below. Sketch the behavior of the intermediate signal q and the value of the output r for the input signal D shown below. Q R From A. Marcovitz, Introduction to Logic Design, McGraw Hill, 2010 5 Preset and Clear Signals Sometimes, a flip-flop has direct inputs that bring the flip-flop to a known starting state at initialization. These direct inputs are force the output of the flip-flop to a known state independent of the clock signal. These direct inputs are called Clear (CLR) and Preset (PRE) signals. A symbol of a D flip flop with active-low CLR and PRE inputs is shown below. PRE D Q CLK Q’ CLR These two new inputs work as follows: • The CLR and PRE inputs affect the flip flop immediately, overriding the clock input. • When the CLR signal is active (i.e., CLR = 0), the output of the flip flop is forced to 0 immediately • When the PRE input is active (PRE = 0), the output of the flip flop is forced to 1 immediately. When would the D flip flop operate as described before? When CLR = 1 and PRE = 1. Can you see a situation that is not permitted? CLR = 0 and PRE = 0 (both can NOT be active at the same time). Example. Sketch the output Q of a negative-edge triggered D flip flop whose inputs are shown below. CLR PRE Q From A. Marcovitz, Introduction to Logic Design, McGraw Hill, 2010 6 3. JK Flip Flop Another type of flip-flop is JK flip-flop which is built based on a D flip-flop. The circuit diagram and symbol of a JK flip-flop is shown below. From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition A symbol of a JK flip flop with active-low CLR and PRE inputs is shown below. PRE J Q CLK K Q’ CLR Characteristic Table Let’s explore the operation of this flip flop by building the state table. Suppose Q is 0 (and Q’ is 1), J is 0, and K is 0. What will be the next state Q(t+1)? D is 0. So, Q(t+1)=0 Suppose Q is 1 (and Q’ is 0), J is 0, and K is 0. What will be the next state Q(t+1)? D is 1. So, Q(t+1)=1. Bottom line: When J and K are both 0, the J-K flip flop… holds its current output. Suppose Q is 0 (and Q’ is 1), J is 0, and K is 1. What will be the next state Q(t+1)? D is 0. So, Q(t+1)=0. 7 Suppose Q is 1 (and Q’ is 0), J is 0, and K is 1. What will be the next state Q(t+1)? D is 0. So, Q(t+1) = 0. Bottom line: When J = 0 and K = 1, the J-K flip flop… resets to Q(t+1)=0. Suppose Q is 0 (and Q’ is 1), J is 1, and K is 0. What will be the next state Q(t+1)? D is 1. So, Q(t+1) = 1. Suppose Q is 1 (and Q’ is 0), J is 1, and K is 0. What will be the next state Q(t+1)? D is 1. So, Q(t+1) = 1 Bottom line: When J = 1 and K = 0, the J-K flip flop… sets to Q(t+1) = 1. Suppose Q is 0 (and Q’ is 1), J is 1, and K is 1. What will be the next state Q(t+1)? D is 1. So, Q(t+1) = 1. Suppose Q is 1 (and Q’ is 0), J is 1, and K is 1. What will be the next state Q(t+1)? D is 0. So, Q(t+1) = 0. Bottom line: When J = 1 and K = 1, the J-K flip flop… Toggles! It will complement its output! The characteristic table for the J-K flip flop is presented below From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition Characteristic Equation The characteristic equation for a JK flip-flop is determined based on the current state of the flip-flop and inputs J and K. The characteristic table for the a JK flip-flop can be rewritten as 8 Q J K Q(t+1) We can then derive the characteristic equation of a JK flip-flop using a 3-variable K-map. JK Q 00 01 11 10 0 1 Q(t+1) = JQ’ + K’Q Timing Diagram The behavior of a JK flip-flop can be illustrated with a timing diagram. Example: Show the output of the J-K flip flop whose input is shown below (assume negative-edge triggered with active-low CLR signal). CLR Q From A. Marcovitz, Introduction to Logic Design, McGraw Hill, 2010 9 Example: How would the example above change if we also had an active-low preset signal shown below. CLR PRE Q From A. Marcovitz, Introduction to Logic Design, McGraw Hill, 2010 4. T Flip Flop The last type of flip-flop is the T(toggle) flip-flop which is a complementing flip-flop. The T flip-flop can be obtained from a JK flip-flop (J and K inputs tied together) or a D flip-flop (with a XOR gate) as shown below. From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition A symbol of a JK flip flop with active-low CLR and PRE inputs is shown below. PRE T Q CLK Q’ CLR 10 Characteristic Table Explain the operation of this flip flop. When T = 0, the flip flop holds its state. When T = 1, the flip flop toggles The characteristic table for the J-K flip flop is presented below. From Mano and Ciletti, Digital Design: With an Introduction to the Verilog HDL, 5th edition Characteristic Equation The characteristic equation for a T flip-flop is determined based on the current state of the flip-flop and input T. The characteristic equation for a T flip-flop is Q(t+1) = T ⨁ Q(t) Timing Diagram The behavior of a T flip-flop can be illustrated with a timing diagram. Example: Show the output of the T flip flop whose input is shown below (assume negative-edge triggered with active-low CLR signal). CLR Q From A. Marcovitz, Introduction to Logic Design, McGraw Hill, 2010 11