Kalman Filter Based Detection and Mitigation of Subsynchronous
advertisement

1
Kalman Filter Based Detection and Mitigation of
Subsynchronous Resonance with SSSC
Thirumalaivasan Rajaram, Member, IEEE, Janaki Muneappa Reddy, Member, IEEE, and Yunjian Xu, Member,
IEEE
Abstract—In a long transmission line the use of static series
synchronous compensation (SSSC) with fixed series capacitor
enables fast control of power flow. There is a potential risk
of subsynchronous resonance (SSR) due to the series capacitor.
In this paper, we propose to use the Kalman filter (KF) for
state estimation of subsynchronous components present in series
compensated line and the mitigation of SSR. This novel Kalman
filter based SSR damping controller is referred to as Kalman
filter-damping controller. The design of Kalman filter-damping
controller is based on the magnitude of damping torque in
the range of torsional mode frequencies. We apply the genetic
algorithm to optimize the controller parameters. The proposed
Kalman filter-damping controller is highly frequency selective
and effectively suppresses subsynchronous components of line
current in the presence of close frequency oscillations. Analytical
and simulation results at various system operating conditions
demonstrate the effectiveness and robustness of the proposed
Kalman filter-damping controller in mitigating SSR.
Index Terms—Voltage Source Converter (VSC), Subsynchronous Resonance (SSR), Damping torque, Eigenvalue, Static
Synchronous Series Compensator (SSSC), Kalman Filter (KF),
Genetic Algorithm (GA).
I. I NTRODUCTION
T
HE use of fixed series capacitor in electric power transmission line significantly increases transient and steadystate stability limits in addition to reactive power control. It
is worth noting, however, that subsynchronous resonance is
caused by interaction between two subsystems of the power
systems, i.e., the electrical subsystem consisting of series
compensated transmission lines, and the mechanical subsystem consisting of multimass turbine-generators. If controlling
measures are not incorporated, the interaction of these two
subsystems can aggravate the oscillations of generator rotors at
subsynchronous frequency and result in generator shaft failures
[1]-[4].
There exists a substantial literature on the design and
analysis of countermeasures to mitigate the subsynchronous
resonance (SSR) and to improve system stability. The improved blocking filter is designed to suppress different SSR
problems [5]. The subsynchronous damping controller (SSDC)
This work was supported in part by the Singapore University of Technology
and Design through SRG project SRES13068. (Corresponding author: Yunjian
Xu.)
R. Thirumalaivasan is with the School of Electrical Engineering, VIT
University, Vellore, India and doing post doctoral research in Engineering
Systems and Design Pillar, Singapore University of Technology and Design,
Singapore.
M. Janaki is with the School of Electrical Engineering, VIT University,
Vellore, India.
Y. Xu is with the Engineering Systems and Design Pillar, Singapore University of Technology and Design, Singapore. (e-mail: yunjian xu@sutd.edu.sg).
with the family of subsynchronous dampers (SSD) is proposed
to provide positive damping by injecting damping currents into
the generator [6]. Several other techniques have been proposed
to alleviate SSR using FACTS (Flexible AC Transmission
Systems) devices, for instance, the subsynchronous damping
controller with STATCOM which provides positive damping
in the range of critical torsional mode frequencies [7] and the
supplementary controller with SSSC which adjusts the gain
and phase of modal speeds to improve the damping of torsional
mode [8].
Previous research has proposed several estimation algorithms that extract the subsynchronous components so as to
effectively mitigate SSR with hybrid compensation consisting
of fixed capacitor and FACTS devices (such as STATCOM
or SSSC). To estimate the subsynchronous voltage components, the authors of [9] propose the low pass filters (LPF)
estimation algorithm which is shown to provide more freedom
for bandwidth selection than the recursive least square (RLS)
algorithm. The suitability of two ambient algorithms for online
monitoring of SSR modes, i.e., the frequency domain decomposition (FDD) and the RLS algorithm, are tested in [10],
where both algorithms are shown to have good performance
on tracking the changes in damping levels of the torsional
modes and therefore can provide early alarms. Reference [11]
addresses the mitigation of SSR using SSSC with an estimated
subsynchronous voltage component in which low-pass filters
are used in estimation algorithm. In our previous work [12],
a subsynchronous current suppressor with band-pass filter is
proposed to extract the subsynchronous components of line
current, based on which the SSSC injects a proportional subsynchronous voltage to suppress the subsynchronous frequency current flowing through the generator and to mitigate SSR.
In [13], Thyristor controlled series capacitor (TCSC) with
Kalman filter is used to eliminate subsynchronous oscillations
caused by SSR in power systems.
In this paper, we propose an estimation algorithm that
extracts the subsynchronous components of line current using Kalman filter. To mitigate SSR, SSSC injects a subsynchronous voltage in proportion to the estimated subsynchronous components of line current. The Kalman filter is a
highly frequency selective, recursive model based least square
estimator, which is widely used for state estimation of harmonics in power systems. This novel approach using Kalman filter
is referred to as Kalman filter-damping controller. In what
follows we discuss the advantage of the proposed approach
over those used in the literature.
The selection of bandwidth of filters is crucial so as to
enhance the damping of torsional modes [9], [12]. In addition,
2
the accurate estimation of subsynchronous components requires low bandwidth filters with high selectivity. The Kalman
filter does not need the selection of bandwidth required by
low-pass filters [11] or the knowledge of eigenvalue analysis
to choose the pass band for band-pass filters [12]. The resonance frequencies of (turbine-generator) mechanical systems
are well known, hence the design of Kalman filter extracting
subsynchronous components of torsional frequencies is simple
as it merely relies on the knowledge of the torsional frequency.
Since the Kalman filter is highly frequency selective, the proposed estimator is expected to provide more accurate estimates
on subsynchronous components than low-pass and band-pass
filters with low bandwidth, and to further improve the damping
of torsional modes. To our knowledge, this work is the first that
uses voltage source converter (VSC) based FACTS controllers
with Kalman filter to mitigate SSR in power transmission
networks.
This paper presents SSR characteristics of series hybrid
compensated power system (i.e., a combination of fixed capacitor and SSSC) using linear analysis and transient simulation.
SSSC is based on a 3-level 24 pulse voltage source converter
[14] and Type-1 controller [15], [16]. The detailed analysis of
SSR is carried out with IEEE First Benchmark Model [17].
Based on the D-Q model, we conduct the damping torque
analysis and eigenvalue analysis, and design the Kalman filter
damping controller. The results of our linear analysis are
validated using transient simulation with both the D-Q and
a more detailed nonlinear three phase models of SSSC. We
investigate the frequency sensitivity and selectivity of the proposed Kalman filter-damping controller in the presence of very
close frequency oscillations. Our analytical and simulation
results show the effectiveness of the proposed Kalman filterdamping controller in improving the damping of torsional
modes and mitigating SSR.
The rest of the paper is organized as follows. In Section
II we present the modelling of the system. In Section III we
present a case study that motivates the application of Kalman
filter to mitigate SSR. In Section IV, we design the Kalman
filter-damping controller and conduct performance evaluation.
Some brief concluding remarks are given in Section V.
Vg
θg
I
Eb 0
+
X
Rl
Generator
X sys
Xc
l
Rt X
t
VSC
SSSC
bc
+
gc
a) Electrical system
ω
Te
IP
HP
LPA
LPB
EXC
GEN
b) Six mass mechanical system
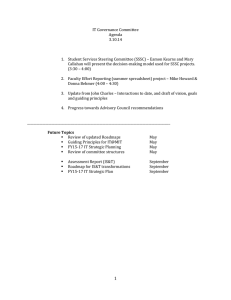
Fig. 1.
Modified IEEE First Benchmark Model with SSSC
network is described by the following equation [4]
xL I˙d
Vgd
RL
ω̄XL
Id
=
+
Vgq
−ω̄XL RL
Iq
ωB I˙q
i (1)
VD
VcD
EbD
+ T
+
+
,
VQi
VcQ
EbQ
where
T
=
cosδ
sinδ
−sinδ
cosδ
.
Here, RL and XL are the series resistance and inductive
reactance seen from the generator terminals. ω̄ is the per unit
speed of the generator rotor. Vg , I, Vc , V i and Eb are generator
terminal voltage, line current, capacitor voltage, SSSC injected
voltage, and infinite bus voltage, respectively. The modeling
of six-mass mechanical system, generator (2.2) model are
detailed in [4], [18].
B. Modeling of SSSC in D-Q frame
The schematic representation of SSSC and its phasor diagram are shown in Fig. 2, where Rs and Xs are the resistance
and reactance of the interfacing transformer of VSC. In this
paper, the SSSC is based on 3-level, 24-pulse voltage source
converter [19], [20].
D
II. M ODELING OF THE SYSTEM
VR
i
VD
i
V = K mVdc
i φ
The IEEE first bench mark (FBM) model [17] is adapted in
our study: the overall system consists of a turbine, a generator
(2.2 model), as well as SSSC in series compensated long transmission lines, as shown in Fig. 1. The modeling of different
subsystems are presented in the next a few subsections.
Rs
Vi φ
Xs
γ
i
γ
VP
VQ
φ
Q
I
A. State Model of Electrical and Mechanical System
Fig. 2.
Schematic and Phasor representation of SSSC.
The analysis of subsynchronous resonance require the detailed modeling of the mechanical system in addition to the
electrical system. In Fig. 1, the external network consists of
a generator that is connected to infinite bus through series
compensated long transmission line with SSSC. The external
The D and Q components of SSSC injected voltage are
described as,
VDi = Km Vdc sin(φ + γ),
(2)
VQi
(3)
= Km Vdc cos(φ + γ).
3
Here, Km is the modulation index [19] and it is given as
kρcosβ for 24-pulse three-level converter, which is a function
of dead angle β. ρ is the transformation ratio of SSSC
interfacing transformer.
In Fig. 2, the phase angle of converter voltage leads the
phase angle of line current φ by γ. In the right subplot of
Fig. 2, VP is the real voltage of V i and in phase with line
current I, whereas the quadrature term VR is the reactive
voltage. The relation between the real and reactive voltages
(VP and VR ) is
VR = VDi cos φ − VQi sin φ,
(4)
VP = VDi sin φ + VQi cos φ.
(5)
III. A CASE STUDY
In this case study, we consider the following initial operating
conditions and assumptions.
1) The generator output power (Pg ) is 0.9 p.u.
2) The turbine (mechanical) input power is taken constant.
3) The study is carried out for two cases with 0.76 p.u
total series compensation. In Case-1, 0.76 p.u series
compensation is provided by fixed capacitor (Xc ) alone.
In Case-2, series hybrid compensation is used with 0.25
p.u of compensation by SSSC (XSSSC = VR /I) and
0.51 p.u of compensation by fixed capacitor Xc .
4) In transient simulation, a step change of 10% decrease
in mechanical input torque is applied at 0.5 sec and it is
restored at 1 sec. A 3-phase to ground fault at generator
terminal (with fault impedance given in [17]) is applied
at 1 sec and cleared after 3 cycles.
The positive values of VP and VR show active power
absorption from the line and the inductive mode of operation
of SSSC, respectively. The detailed modeling of SSSC can be
found in [12].
A. Eigenvalue analysis
C. SSSC Voltage control
In a 3-level converter topology, Type-1 controller is used to
control the magnitude of the VSC output voltage by varying
the dead angle β with fundamental switching frequency [21]
and the phase angle by varying γ. The voltage of DC side
capacitor (Vdc ) is maintained constant by controlling real
voltage VP and hence the set value of real voltage VPord is
obtained from the DC voltage controller. The set value of
reactive voltage VRord can be kept constant or obtained from
a power scheduling controller.
The eigenvalues of the system matrix for both cases are
given in Table I. We note that the torsional mode-1 becomes
unstable in Case-1, and the inclusion of SSSC (Case-2)
decreases undamping of mode-1. As the frequency of network
mode (sub) closely matches with torsional mode-2, it is found
to be unstable in Case-2. It is clear that the application of
SSSC increases and shifts the network resonant frequency.
TABLE I
E IGENVALUES OF THE COMBINED SYSTEM WITH AND WITHOUT SSSC.
Torsional
Mode
Vdc
0
1
2
3
4
5
Network
mode(sub)
Network
mode(super)
1
1 + s Tmd
−
+
+
kp
ord
γ and β
+
−
VPsub
VP
Σ
γ
calculator
VR
ki
s
ord
+
β
Σ
−
sub
VR
−4.9272 ± j 99.378
−3.7700 ± j 128.410
−5.7326 ± j 658.090
−4.8842 ± j 590.200
Type-1 controller for SSSC.
The pictorial representation of Type-1 controller for SSSC
is given in Fig. 3. It is worth noting that the voltages VPsub
and VRsub are obtained from the Kalman filter-damping controller and are used to modulate the real and reactive voltage
references of SSSC. γ and β are given by
VR(ord)
,
(6)
γ = tan−1
VP (ord)
q
β = cos−1
2
VP2(ord) + VR(ord)
kρVdc
.
(7)
80
Rotor angle in deg
Fig. 3.
Case 2 : W ith SSSC
(Xc = 0.51 p.u
and XSSSC = 0.25 p.u)
−1.7105 ± j 8.2100
0.0977 ± j 99.080
0.1578 ± j 127.000
−0.6670 ± j 160.460
−0.3790 ± j 202.850
−1.8504 ± j 298.170
LPA-LPB section torque in p.u
Vdcref
Σ
Case 1 :
W ithout SSSC
(Xc = 0.76 p.u)
−2.6346 ± j 9.3403
2.8086 ± j 97.473
−0.0807 ± j 126.960
−0.6582 ± j 160.490
−0.3740 ± j 202.850
−1.8504 ± j 298.170
75
70
65
0
2
4
6
Time in sec
8
10
0.8
0.75
0.7
0.65
0.6
0.55
0
2
4
6
Time in sec
8
10
Fig. 4.
Response of rotor angle and LPA-LPB section torque for 10%
decrease in input mechanical torque with three phase model of SSSC.
4
B. Transient simulation
In MATLAB-SIMULINK [22], the transient simulation with
combined system including SSSC (Case-2) in both D-Q and
3-phase model is carried out for mechanical input torque
disturbance. The responses are shown in Fig. 4, and the
increase in oscillations of LPA-LPB section torque indicates
that the system is unstable.
C. Damping Torque Analysis with linearized Model of SSSC
The stability in torsional mode can be evaluated using
damping torque analysis [7]. Variation of damping torque is
shown in Fig. 5 for Case-1 and case-2. It is worth noting
that without SSSC (Case-1), the maximum negative damping
occurs at about 98 rad/sec and matches with mode-1 frequency.
Hence, severe torsional interactions are expected. In Case2 (with SSSC), the peak negative damping is significantly
reduced and shifted. Hence undamping of mode-1 reduces;
however subsynchronous electrical frequency is close to 127
rad/sec and the negative damping is substantial. As a result, the
torsional mode-2 is expected to be unstable. This is consistent
with our previous eigenvalue analysis.
10
0
Case - 2
with SSSC
TDe (p.u)
-10
-20
Case - 1
without SSSC
-30
-40
60
Fig. 5.
70
80
90
100
110
120
ωm (rad/sec)
130
140
150
160
Variation of damping torque with and without SSSC.
It is straightforward to see from the damping torque analysis
that the negative damping at critical torsional mode frequencies should be reduced to improve the torsional mode stability.
The oscillations of turbine-generator at natural frequencies
may cause subsynchronous current flow through the transmission network to the generator. Suppressing the subsynchronous
current in transmission lines could help to improve the the
damping in critical torsional modes. In the next section, we
study the detection of subsynchronous components and the
mitigation of SSR using Kalman filters.
IV. K ALMAN F ILTER DAMPING C ONTROLLER AND
A NALYSIS OF SSR
The Kalman filter is commonly used for estimation of state
variables in power systems. The design of Kalman filter is
simple as it merely depends on torsional mode frequencies,
and the resonance frequencies of the mechanical system are
well known. In this paper, Kalman filter is used to extract
subsynchronous frequency components in line current. SSSC
is controlled to inject a proportional subsynchronous voltage
to suppress the subsynchronous frequency current flowing
through the line and the generator, and to improve the damping in the range of critical torsional mode frequencies. We
propose a new approach to reduce subsynchronous currents
flowing through the transmission line and the generator with
a properly designed Kalman Filter-Damping Controller. The
state estimation of subsynchronous current and the structure
of Kalman filter-damping controller will be introduced in the
next a few subsections.
A. Subsynchronous Current Estimation with Kalman Filter
Suppose that the generator rotor oscillates (at about a
constant speed of ωo ) sinusoidally. If the amplitude of rotor
oscillation is small, the induced voltage in the generator stator
consists of three sinusoidal components in α-β sequence [4]
as follows
eα (t)
=
sup
efα (t) − esub
α (t) − eα (t),
eβ (t)
=
sup
efβ (t) + esub
β (t) + eβ (t),
(8)
where ef (t), esub (t), and esup (t) are the fundamental, subsynchronous, and supersynchronous components of induced
voltage in stator, respectively. In general the supersynchronous
component results in positive damping, and subsynchronus
results in negative damping. As such, when the voltage
given in Eq. (8) is applied to the external network, the
subsynchronous currents flow through the network depends
on network impedance and is given by
sub
[Iqsub + jIdsub ] = Z −1 [j(ωo − ωm )]e−j(ωo t+δ) [esub
β + jeα ],
(9)
where
1
Z[j(ωo − ωm )] = RL + j (ωo − ωm )L −
(ωo − ωm )C
(10)
is the impedance (at the subsynchronous frequency) of the
external network in Fig. 1; here, L includes the transient
inductance of the generator.
According to transformation matrix, the subsynchronous
current in D-Q frame is given by
sub
sub
[IQ
+ jID
] = ejδ [Iqsub + jIdsub ].
(11)
The magnitude of a subsynchronous frequency component
is given by
q
sub )2 + (I sub )2 .
I sub = (IQ
(12)
D
The induced voltage in the generator is given in α-β
sequence in Eq. (8). The Kalman filter is designed to extract
the subsynchronous components from the D-Q components of
line current. In (9)-(12), we derive the expressions for the D-Q
components of line current. We establish the relation between
the state of the Kalman filter and the D-Q components of a
subsynchronous frequency current (that is to be filtered) as
sub
T
x1
xsub
xsub
xsub
2
3
4
(13)
sub
T
sub
sub
sub
ImD⊥
ImQ†
ImQ⊥
= ImD†
,
where the symbols † and ⊥ indicate in-phase and quadrature
components of the estimated subsynchronous current, m is the
torsional mode, and xsub
and xsub
are the states corresponding
1
2
5
to in-phase and quadrature components of subsynchronous fresub
quency current ImD
from ID , respectively. Similarly xsub
and
3
sub
x4 are the states corresponding to in-phase and quadrature
sub
components of subsynchronous frequency current ImQ
from
IQ , respectively. Hence we consider four state variables for
sub
each subsynchronous frequency current Im
. The state space
model of Kalman estimator for a subsynchronous frequency
current is defined as
sub
sub
x1
x1
w1
1 0 0 0
0 1 0 0 xsub
xsub
2 + w2 ,
2sub
=
0 0 1 0 xsub
x3
w3
3
sub
sub
w4 k
0 0 0 1 k x4
x4
k
k+1
(14)
xsub
1
xsub
2sub + v1
,
x3
v2 k
k
xsub
4
k
y1sub
y2sub
=
k
H1
Z
Z
H2
Z
sin(ωm tk ) cos(ωm tk )
=
0
0
R
0
i=j
i6=j
At every iteration, we compute the following Kalman filter
matrix equations.
• Prior estimation of state and error covariance:
−
sub
[xsub
k+1 ] = Axk ,
−
[Pk+1 ] = APk AT + Q.
•
Compute Kalman gain:
Kk = Pk− H T (HPk− H T + R)−1 .
Update estimate:
sub
+
sub −
−
[xsub
− H[xsub
.
k ] = [xk ] + Kk yk
k ]
Update error covariance:
Pk+ = (I − Kk H)Pk− .
where Pk , Kk , and I are the error covariance matrix, Kalman
gain, and the identity matrix, respectively.
•
B. Structure of Kalman Filter-Damping controller
,
.
Here, ωm and tk are torsional mode frequency and the time at
sub
sub
iteration, respectively. ImD
and ImQ
are the subsynchronous
components from ID and IQ , respectively. As shown in Fig. 1,
the IEEE FBM with six mass mechanical system has five
natural torsional mode frequencies [4]. The modal inertia
of torsional mode-5 is very high, and hence the Kalman
filter is intended to extract four subsynchronous frequency
components for torsional modes m=1, 2, 3 and 4. Combining
the state equations of the four subsynchronous frequency
currents, we define the state space model of Kalman estimator
as
sub
xsub
k+1 = Axk + wk ,
yksub = Hk xsub
k + vk ,
(15)
where
H1k = H2k =
E{vi vjT } =
The structure of Kalman filter-damping controller is shown
in Fig. 6. The extracted subsynchronous components from the
Kalman filter are passed through appropriate gains k1 to k8 to
sub
sub
, which are summed up to obtain signals
and VmQ
obtain VmD
sub
sub
VD and VQ . The output of KF-damping controller are
X
sub
VDsub =
VmD
,
VQsub
=
m
X
The output of KF-damping controller VDsub and VQsub (in
D-Q frame of reference) are then transformed to in-phase and
quadrature components VPsub and VRsub respectively, and are
used to modulate in-phase and quadrature voltage orders VPord
and VRord of the SSSC as shown in Fig. 3 in section-2C.
sub
sub
(16)
k1
sub
I1Q
(17)
where wk and vk are the process and observation noise
vectors, respectively; their covariance matrices are given by
Q
i=j
T
E{wi wj } =
0
i6=j
(19)
m
I1D
where dim xsub
= 4m × 1 and dim yksub = 2m × 1.
k
sub
sub T
sub
xsub
= [xsub
1 , x2 , ... x15 , x16 ]k are the states of the
k
subsynchronous current components corresponding to four
torsional modes, and yksub = [y1sub , y2sub , ... y7sub , y8sub ]Tk
is the measurement vector which is the output (i.e., the extracted subsynchronous current components) of Kalman filter.
A and Hk are the state transition and measurement matrices
respectively.
We are now ready to describe the relation between the
output of Kalman filter and the D-Q components of filtered
subsynchronous frequency currents:
sub sub
T
y1 y2 ... y7sub y8sub
sub sub sub sub sub sub sub T
= isub
, (18)
1D i1Q i2D i2Q i3D i3Q i4D i4Q
sub
VmQ
.
sub
V1D
Σ
sub
k2
VD
sub
V1Q
Σ
VQ
sub
I2D
sub
I2Q
ID
Kalman Filter
IQ
(output)
y sub
Σ
k4
sub
I3D
sub
I3Q
I4D
Σ
k6
sub
k7
sub
I4Q
Σ
k5
sub
Fig. 6.
Σ
k3
V4D
sub
k8
V4Q
Block diagram of Kalman filter-damping controller.
The performance of Kalman filter depends on the observation and process noise covariance. The effect of increasing
process noise covariance Q increases the error in the measured
value. It is therefore important to tune the observation noise
covariance R and gains k1 to k8 to improve the damping of
6
98.6
Mode-0
10
Imag part
Imag part
15
Rlocus-1
Rlocus-2
5
0
-1.5
98.3
-1
-0.5
Real part
0
98.2
-1
-0.8
-0.6
Real part
220
Mode-3 and Mode-4
Mode-2
126.986
Imag part
Imag part
Rlocus-1
Rlocus-2
98.4
126.988
126.984
Mode-1
98.5
Rlocus-1
Rlocus-2
126.982
200
Rlocus-1 (mode-3)
Rlocus-1 (mode-4)
Rlocus-2 (mode-3)
Rlocus-2 (mode-4)
180
160
126.98
-0.098 -0.096 -0.094 -0.092 -0.09
Real part
140
-0.7
-0.6
-0.5
-0.4
Real part
-0.3
Fig. 7. Root locus-1 for variation in gains k1 to k8 (from 1 to 5) and root
locus-2 for variation in observation noise covariance (from 1 to 5).
C. Optimization of Kalman filter-damping controller Parameters
The Kalman filter (KF)-damping controller is designed to
enhance the damping of critical torsional modes. Genetic algorithm (GA) [23] is adopted to optimize the gains k1 to k8 of the
KF-damping controller. To improve the damping of critical torsional modes, we seek to minimize the deviation between the
desired damping torque TDe(des) and actual damping torque
TDe in the range of torsional mode frequencies. The robustness
of KF-damping controller is achieved by incorporating variant
compensation levels in the optimization.
The optimization problem is formulated as,
XX
2
minimize SSE =
TDe(des) − TDe (ω) ,
(20)
Xc
ω
subjected to the constraint that the real parts of all eigenvalues
are negative (to ensure the stability of the system). In (20),
SSE is the summation of squared errors over the range of
series compensation (Xc = 0.05 to 0.75 p.u and Xsssc =
0.25 p.u, and 50 ≤ ω ≤ 300 rad/sec) up to 100%. The
desired damping torque is taken as 8 p.u, to ensure that the
real parts of all eigenvalues are negative.
5
with SSSC and KF-Damping controller
0
TDe (p.u)
-5
-10
with SSSC
-15
-20
-25
50
100
150
200
250
300
ωm (rad/sec)
Fig. 8.
Damping torque with SSSC and Kalman filter-damping controller.
D. Analysis of SSR with KF-damping controller
The SSR with KF-damping controller is evaluated using
eigenvalue analysis, damping torque analysis, and transient
simulation. A graphical portrait of reactance with SSSC and
KF-damping controller is presented in this section to illustrate
the resonance condition. We further find out that the solution of
the GA optimization (k1 to k8 ) remains unchanged at various
operating conditions, which demonstrates the robustness of the
proposed KF-damping controller.
1) Damping Torque Analysis: Fig. 8 shows how the damping torque changes with frequency ωm . We observe that
the peak negative damping is significantly reduced with GA
optimized KF-damping controller. With the KF-damping controller, negative damping in the range of torsional frequencies
(60 − 300 rad/sec) is negligible. As a result, the system is
expected to be stable with the intrinsic mechanical damping.
Real part of eigenvalues of torsional modes
torsional modes. Fig. 7 shows how the eigenvalues of combined system (SSSC with KF-damping controller) change with
varying observation noise covariance R and gains k1 to k8 .
Root locus-1 is computed using varying gains k1 to k8 (from
1 to 5) and fixed observation noise covariance. Root locus-2 is
computed using varying observation noise covariance (from 1
to 5) and fixed gains k1 to k8 . It is noticed that the trajectories
of eigenvalues in root locus-1 and root locus-2 are moving
closely in same direction. We observe that the damping of
torsional modes depends on the observation noise covariance;
also, varying the gains k1 to k8 has more significant effect on
the damping of eigenvalues of torsional modes than varying
the observation noise covariance. Therefore we tune k1 to k8
to improve the damping of torsional modes while keeping the
observation and process noise covariances fixed. We follow
the systematic approach proposed in [12] to tune the gains
k1 to k8 . In the following subsection, we apply the genetic
algorithm to optimize the parameters in the Kalman filterdamping controller based on damping torque.
0.05
Mode-5
Mode-2
0
Mode-4
-0.05
Mode-3
-0.1
-0.15
-0.2
Mode-1
-0.25
-0.3
Mode-0
-0.35
-0.4
0.3
0.4
0.5
0.6
0.7
0.8
Total compensation (X c+Xsssc)
0.9
1
Fig. 9.
Real part of eigenvalues of torsional modes for variation in
compensation level with Kalman filter-damping controller.
In Fig. 9, we plot the real parts of eigenvalues for all
torsional modes over the entire compensation range from
0.3p.u to 1p.u. (the mechanical damping is neglected). We
observe that all torsional modes are stable over the entire
compensation range, i.e., the system is robust against damping
subsynchronous oscillations under the practical range of series
compensation.
7
3
Xc+Xse
2
Xc
X
se
1
XL
100
150
200
250
Electrical resonance frequency (ωm) in rad/sec
Fig. 10.
300
80
Graphical portrait of reactance.
2) Graphical portrait of resonance condition: A graphical
portrait of reactance with SSSC and KF-damping controller
(Case-2) to illustrate the resonance condition is depicted in
Fig. 10. It shows the variation of capacitive reactance Xc ,
inductive reactance XL , emulated reactance Xse of SSSC
on single phase basis, and total effective capacitive reactance
(with the KF-damping controller) Xc + Xse are plotted as a
function of the frequency ωer [12]. The total effective capacitive reactance Xc + Xse never equals XL in the frequency
range of 50-300 rad/sec, and as a result, the proposed KFdamping controller ensures that the series compensated power
system is free from SSR.
3) Eigenvalue Analysis: The eigenvalues of the combined
system with SSSC and KF-damping controller are shown in
Table II.
TABLE II
E IGENVALUES OF THE COMBINED SYSTEM WITH SSSC AND K ALMAN
FILTER - DAMPING CONTROLLER
Torsional
mode
0
1
2
3
4
5
W ith SSSC and KF − dampingcontroller
(Xc = 0.51 p.u and XSSSC = 0.25 p.u)
−1.4476 ± j 8.3088
−0.4579 ± j 98.369
−0.0892 ± j 126.980
−0.6864 ± j 160.520
−0.4053 ± j 202.870
−1.8504 ± j 298.170
Network mode subsynchronous
−33.039 ± j 44.836
Network mode supersynchronous
−66.983 ± j 469.660
We note from Fig. 10 that with Kalman filter damping
controller the effective capacitive reactance (Xc + Xse ) is
increased. Since the resonance frequency (ωer ) is proportional
to the capacitive reactance, the resonance frequency (ωer )
is expected to increase. From Fig. 10, we observe that the
subsynchronous resonance does not occur in the frequency
range of 50-300 rad/sec with Kalman filter damping controller.
Thus in Table II, the frequency of the subsynchronous network
mode (ωer ) is reduced as compared to Table I (Case-2).
Comparing the eigenvalue results in Table II (SSSC with
KF-damping controller) to column-2 of Table I (SSSC without
Rotor angle in deg
0
50
75
70
65
0
5
10
0.8
0.75
0.7
0.65
0.6
0.55
15
0
5
Time in sec
10
Time in sec
15
Fig. 11. Response of rotor angle and LPA-LPB section torque for 10%
decrease in mechanical input torque with the SSSC and the Kalman filterdamping controller that is activated at t = 5 sec.
4) Transient Simulation: Fig. 11 shows the transient simulation of the combined model with SSSC and KF-damping
controller under a full load of Pg = 0.9 p.u. We observe that as
a result of mechanical disturbance the section torque increases
with time. When the KF-damping controller is activated at
t = 5 sec, the oscillation of shaft section torque decays with
time. The FFT analysis of the LPA-LPB section torque is
shown in Fig. 12, from which we observe that the mode-1
component is increasing and becomes predominant in 3-5 sec
time span. When the KF-damping controller is activated at
t = 5 sec, the mode-1 component decays quickly with time,
demonstrating the effectiveness of the KF-damping controller
to suppress the subsynchronous frequency components in
transmission lines.
Absolute magnitude
Reactance in p.u
4
KF-damping controller), we conclude that the KF-damping
controller leads to
1) significant enhancement in the damping of eigenvalues
of torsional modes 1 and 2,
2) marginal enhancement in the damping of eigenvalues of
torsional modes 3 and 4,
3) marginal reduction in the damping of eigenvalue of
torsional mode-0,
4) significant increase in the damping of subsynchronous
network mode,
5) and no effect on torsional mode-5.
LPA-LPB section torque in p.u
5
0.1
0.1
0.05
5 - 6 sec
0
0
100
200
300
6 - 7 sec
0.05
0.05
0.05
0
0.1
0.1
4 - 5 sec
3 - 4 sec
100
200
300
0
100
200
300
100
200
300
Frequency (rad/sec) Frequency (rad/sec) Frequency (rad/sec) Frequency (rad/sec)
Fig. 12. FFT analysis of LPA-LPB section torque with Kalman filter-damping
controller (activated at t = 5 sec).
Transient simulation for three phase fault with Pg = 0.9 p.u
and Pg = 0 p.u are carried out and shown in Fig. 13. It is observed that with the KF-damping controller the oscillations of
section torque decay with time. Fig. 14 shows the magnitudes
of the line current along with subsynchronous currents and
the D-Q components of total subsynchronous current under
the three phase fault (with Pg = 0 p.u). The simulation result
demonstrates the effectiveness of the Kalman filter-damping
controller in extracting and suppressing the subsynchronous
frequency components even when the line current (at the
fundamental frequency) is zero as Pg = 0 p.u.
8
for Pg = 0.9 p.u
0
-5
-10
5
10
Time in sec
15
I sub
1
sub
I1
5
2
1
0
0.1
0
I
I sub
1
I sub
2
I sub
3
I sub
4
I sub
D
Time in sec 10
-2
0
5
0.2
-4
0
5
10
Time in sec
15
2
1
0
0.1
0
Fig. 15.
0.2
×10
2
1
0
0.1
×10-3
9.5
Time in sec 10
0
5
0.2
-3
2
1
0
0.1
10
5 Time in sec 10
10
0
×10
Time in sec 10
-3
9.5
0
0
10
5 Time in sec 10
Response of the Kalman filter for different Q values.
subplots in Fig. 15 show the measurement error in magnitude
of subsynchronous components.
Response-1 is for the actual values of Q used in simulation:
Q1 = 3.5e−8 ; Q2 = 1e−8 ; Q3 = 1e−9 ; Q4 = 1e−9 ;
5
0
5
Time in sec
10
15
Q5 = 1e−9 ; Q6 = 1e−9 ; Q7 = 1e−9 ; Q8 = 1e−9 .
Response-2 is for incremented values of Q:
0
5
Time in sec
10
15
Q1 = 3.5e−6 ; Q2 = 1e−6 ; Q3 = 1e−7 ; Q4 = 1e−7 ;
10
15
Q5 = 1e−7 ; Q6 = 1e−7 ; Q7 = 1e−7 ; Q8 = 1e−7 .
0
0
5
Time in sec
10
15
0
5
Time in sec
10
15
0
5
Time in sec
10
15
0
5
Time in sec
10
15
0
0.3
I sub
Q
10
5
10
0
0.1
0.4
0
-0.4
0
×10-3
9.5
0.1
0.05
9.5
0
0
0
10
×10-3
Time in sec
0
0.1
0.1
Time in sec 10
sub
3
0.2
2
0.2
0.2
2
1
0
9.8
Time in sec 10
4
Fig. 13. Response of rotor angle and LPA-LPB section torque for 3-phase
fault at generator terminal with SSSC and Kalman filter-damping controller
for Pg = 0.9 p.u and Pg = 0 p.u.
0.2
0.2
sub
2
0
5
10
0
9.5
0.4
0
×10-3
9.5
0
3
2
1
0
9.6
0
Time in sec 10
I
0.1
15
×10-3
0
10
I
5
5
10
Time in sec
3
LPA-LPB section torque
Rotor angle in deg
0
for Pg = 0 p.u
10
0
-2
15
2
1
0
5
I sub
4
5
10
Time in sec
9.8
5
0.2
I sub
0
0
2
50
0
0
0
Response-2
0.5
×10-3
9.6
I sub
70
5
2
sub
90
Response-1
0.5
4
I4
LPA-LPB section torque
Rotor angle in deg
110
0
-0.3
Fig. 14. Magnitudes of line current along with extracted four subsynchronous
currents and D-Q components of total subsynchronous current for 3-phase
fault at generator terminal when Pg = 0 p.u with Kalman filter-damping
controller.
E. Frequency Selectivity of Kalman Filter
The state estimation of Kalman filter algorithm depends on
the values of the process noise covariance (Q) and the observation noise covariance (R). Hence the frequency selectivity
of Kalman filter can be illustrated through its response to
different values of Q and R. In Section IV-B we discussed
the effect of varying the observation noise covariance. Next,
we present the effect of varying the process noise covariance
for two sets of Q values.
Fig. 15 shows the magnitude of subsynchronous components from the Kalman filter for two sets of Q values. The
We observe from Fig. 15 that the effect of increasing process
noise covariance (Q) increases the error in the measured value.
We also observe that the overshoot and the response time are
higher in Response-2. These results indicate that the frequency
selectivity of Kalman filter primarily depends on the process
noise covariance (Q) and the observation noise covariance (R).
Since the time scale of the variance of Q and R is in general
larger than the time scale of SSR, Q and R can be considered
to be fixed in our analysis; their values are given in Appendix
A.
F. Effectiveness and sensitivity of KF-damping controller in
close frequencies scenario
We carry out detailed analysis of SSR for the proposed
Kalman filter - damping controller on the IEEE FBM model,
which is the standard benchmark model to test the effectiveness of any countermeasures in validating the damping of
SSR. For a power plant consisting of several generators with
near and spread torsional mode frequencies, multiple torsional
mode frequency components are expected to present in the
line current. In such situations, damping controllers should
be designed to mitigate all critical torsional mode oscillations
[24].
In multi-machine systems it is important to analyze the
effectiveness and sensitivity of damping controller to close
frequency oscillations. We have investigated the sensitivity of
9
KF- damping controller and analyzed the damping effectiveness in the presence of close frequency oscillations. In what
follows, we present the investigation of damping effectiveness
and sensitivity for the proposed Kalman filter - damping
controller.
1) Effectiveness of KF-damping controller: We seek to
investigate the damping effectiveness of the designed Kalman
filter in the presence of close frequency oscillations. We
consider a signal in the following form
Ie (t) = Ae e−at sin(ωe t + φe ),
(21)
Absolute magnitude
which is assumed to imitate an oscillation in line current,
and is termed as simulating signal [24]. In this analysis, the
simulating signals of 15.2, 19.7, 25 and 31.78 Hz are chosen to
test the effect of near frequency oscillations. The effectiveness
of Kalman filter - damping controller is tested for different
amplitude of simulating signals, which are added at the time
of fault clearance to the line current. The transient simulation
of the combined system is carried out with three phase fault
that is applied at t = 1 sec and is cleared after 3 cycles. FFT
analysis of simulating signals for the time span of 1 sec are
shown in Fig. 16.
Fig. 17 demonstrate the effectiveness of Kalman filter damping controller through FFT analysis of Kalman filter
output for different amplitudes of simulating signals. The
simulating signals of different frequencies are expected to
distort the actual subsynchronous component. We observe
from Fig. 17 that the magnitude of subsynchronous components (output of the designed Kalman filter) is increased due
to simulating signals and the response time of damping is
significantly increased for torsional mode-2. However, as time
progresses the magnitude of four subsynchronous components
are reduced with Kalman filter - damping controller, indicating
the stability of the system. These results demonstrate the effectiveness of the proposed KF-damping controller to suppress
the subsynchronous frequency components in the presence of
close frequency oscillations.
0.04
0.04
1 - 2 sec
0.03
0.02
0.01
0.01
0
0.02
150
200
0
100
simulating signals (of ampliude 0.1)
simulating signals (of ampliude 0.2)
Fig. 16.
3 - 4 sec
0
100
and vary the magnitudes of subsynchronous components. It is
straightforward to see that the simulating signal frequencies
are not present in the Kalman filter’s output, demonstrating
that KF-damping controller is not sensitive to the close frequencies and has high frequency selectivity.
0.04
2 - 3 sec
0.03
0.02
Fig. 17. FFT analysis of Kalman filter output for different amplitudes of
simulating signals.
150
200
100
150
200
Frequency (rad/sec)
FFT of simulating signals.
2) Sensitivity of KF-damping controller to very close frequencies: The authors of [25] propose to apply damping
controllers for multi-machine plants. Their field tests show
that torsional modes frequencies of generators are very close.
Based on this observation in [25], we investigate the sensitivity
of the designed Kalman filter on 0.1 Hz close frequencies. We
carry out the sensitivity analysis with the simulating signals
at frequencies of 15.6, 20.1, 25.4 and 32.18 Hz.
FFT analysis of Kalman filter output for the time span of
1 sec is shown in Fig. 18, from which we observe that the
simulating signals distort subsynchronous components in line,
Fig. 18. FFT analysis of Kalman filter output with (0.1 Hz) close frequency
simulating signals.
Remark 4.1: We propose a novel Kalman filter based subsynchronous damping controller to extract the subsynchronous
frequency components from the line current. The design of
KF-damping controller is simple as for any compensation
level, Kalman filter extracts subsynchronous frequency components corresponding to torsional mode frequencies. The incorporation of the KF-damping controller improves the damping
10
of all torsional modes and eliminates SSR in the entire range
of series compensation. The analytical and simulation results
exhibit robust performance of the system under different operating conditions, and therefore demonstrate the effectiveness
of the KF-damping controller in mitigating SSR.
V. C ONCLUSION
In this paper, we analyze the SSR characteristics of a
hybrid compensated transmission line with series capacitor
and SSSC. We propose a simple technique for the extraction
of subsynchronous frequency components using Kalman filter.
The design of the Kalman filter-damping controller is based
on the magnitude of damping torque in the range of torsional
mode frequencies. We apply the genetic algorithm to optimize
the controller parameters. The results of various analysis
demonstrate the following.
1) The inclusion of SSSC reduces the peak negative damping.
2) The incorporation of a suitably designed KF-damping
controller significantly improves the damping in the
entire range of compensation levels, under all critical
torsional modes and different operating conditions.
3) Under various types of disturbances, the proposed KFdamping controller effectively extracts and suppresses
the subsynchronous components of line current even
when the fundamental frequency line current at the
operating point is zero.
4) The proposed KF-damping controller completely eliminates the electrical resonance conditions as well as the
SSR under practical series compensation levels.
5) The proposed KF-damping controller is highly frequency selective and effectively suppresses subsynchronous
components of line current in presence of close frequency oscillations.
A PPENDIX A
PARAMETERS OF THE KF- DAMPING CONTROLLER
R1 = 1.2; R2 = 5; R3 = 0.3; R4 = 0.3;
R5 = 0.3; R6 = 0.3; R7 = 0.2; R8 = 0.2;
Q1 = 3.5e−8 ; Q2 = 1e−8 ; Q3 = 1e−9 ; Q4 = 1e−9 ;
Q5 = 1e−9 ; Q6 = 1e−9 ; Q7 = 1e−9 ; Q8 = 1e−9 .
[6] L. Wang, X. Xie, Q. Jiang, and H. R. Pota, “Mitigation of Multimodal Subsynchronous Resonance Via Controlled Injection of Supersynchronous and Subsynchronous Currents”, IEEE Trans. on Power
Systems., vol. 29, no. 3, pp. 1335-1344, May 2014.
[7] K. R. Padiyar and Nagesh Prabhu, “Design and Performance Evalution
of Subsynchronous Damping Controller with STATCOM”, IEEE Transactions on Power Delivery, vol. 21, no. 3, pp. 1398-1405, July 2006.
[8] Dipendra Rai, Sherif O. Faried, G. Ramakrishna and Abdel-Aty
(Aty)Edris, “An SSSC-Based Hybrid Series Compensation Scheme
Capable of Damping Subsynchronous Resonance”, IEEE Transactions
on Power Delivery., vol. 27, no. 2, pp. 531-540, April 2012.
[9] Massimo Bongiorno, Jan Svensson and Lennart Angquist, “Online
Estimation of Subsynchronous Voltage Components in Power Systems”,
IEEE Transactions on Power Delivery, vol. 23, no. 1, pp. 410-418, Jan
2008.
[10] H. Khalilinia and V. Venkatasubramanian, “Subsynchronous Resonance
Monitoring Using Ambient High Speed Sensor Data”, IEEE Trans. on
Power Systems, to be published.
[11] M. Bongiorno, J. Svensson, and L. Angquist, “Single-Phase VSC based
SSSC for Subsynchronous Resonance Damping”, IEEE Trans. on Power
Delivery, vol.23, no.3, pp. 1544-1552, July 2008.
[12] R. Thirumalaivasan, M. Janaki and Nagesh Prabhu, “Damping of SSR
Using Subsynchronous Current Suppressor With SSSC”, IEEE Transactions on Power Systems, vol. 28, no. 1, pp. 64-74, Feb. 2013.
[13] E. Gustafson, A. Aberg and K. J. Astrom, “ Subsynchronous resonance.
A controller for active damping”, in Proc. of the 4th IEEE Conference
on Control Applications, Sep. 28-29, 1995.
[14] N. G. Hingorani and L. Gyugyi, Understanding FACTS, New York: IEEE
Press, 2000.
[15] Schauder and Mehta, “Vector analysis and control of advanced static
VAR compensators”, IEE Proc.-c, vol. 140, no. 4, pp. 299-306, July
1993.
[16] K. R. Padiyar and A. M. Kulkarni, “Design of reactive current and
voltage controller of static condenser”, Int. J. Electr. Power Energy Syst.,
vol. 19, no. 6, pp. 397-410, 1997.
[17] “First bench mark model for computer simulation of subsynchronous
resonance”, IEEE Transactions on Power App. Syst., vol. 96, no. 5, pp.
1565-1572, sep/oct 1977.
[18] K. R. Padiyar, Power System Dynamics - Stability and Control- Second
edition, Hyderabad: B. S. Publications, 2002.
[19] K. R. Padiyar and Nagesh Prabhu, “Analysis of subsynchronous resonance with three level twelve-pulse VSC based SSSC”, in Proc. IEEE
TENCON-2003, Oct. 14-17, 2003.
[20] J. B. Ekanayake and N. Jenkins, “Mathematical models of a three
level advanced static var compensator”, IEE Proc.- Generation Transm.
distrib, vol. 144, no. 2, March 1997.
[21] K. R. Padiyar, FACTS controllers in Power Transmission and Distribution, New Delhi, India. New age International (P) Ltd, Publishers,
2007.
[22] Using MATLAB-SIMULINK, The MathWorks, Inc., Natick, MA, 1999.
[23] Goldberg, “Genetic Algorithm In search, Optimization and Machine
Learning”, Addison Wesley Reading, 1989.
[24] X. Xie, L. Wang, X. Guo, Q. Jiang, Q. Liu, and Y. Zhao, “Development
and field experiments of a generator terminal subsynchronous damper”,
IEEE Transactions on Power Electronics, vol. 29, no. 4, pp. 1693-1701,
April 2014.
[25] X. Xie, L. Wang, and Y. Han, “Combined application of SEDC and
GTSDC for SSR mitigation and its field tests”, IEEE Trans. on Power
Systems, vol. 31, no. 1, pp. 769-776, January 2016.
R EFERENCES
[1] M. C. Hall and D. A. Hodges, “Experience with 500 kV subsynchronous
resonance and resulting turbine generator shaft damage at Mohave generating station”, in Analysis and Control of Subsynchronous Resonance,
1976, IEEE Publ. 76 CH 1066-O-PWR.
[2] C. E. J. Bowler, D. N. Ewart, and C. Concordia, “Self excited torsional
frequency oscillations with series capacitors”, IEEE Transactions on
Power App. Syst., vol. PAS-92, pp. 1688-1695, 1973.
[3] L. A. Kilgore, D. G. Ramey, and M. C. Hall, “Simplified transmission
and generation system analysis procedures for subsynchronous resonance problems”, IEEE Transactions Power App. Syst., vol. PAS-96,
pp. 1840-1846, Nov./Dec. 1977.
[4] K. R. Padiyar, Analysis of Subsynchronous Resonance in power systems,
Boston: Kluwer Academic Publishers,1999.
[5] X. Xie, P. Liu, K. Bai, and Y. Han, “Applying Improved Blocking Filters
to the SSR Problem of the Tuoketuo Power System”, IEEE Trans. on
Power Systems, vol. 28, no. 1, pp. 227-235, Feb. 2013.
R. Thirumalaivasan (M’12) received his Ph.D.
degree in the Department of Electrical Engineering,
JNTU Hyderabad and M.Tech degree from College
of Engineering, Anna University, Guindy, Chennai.
He is an associate professor in the School of Electrical Engineering at VIT University, Vellore, India
and pursuing his post doctoral research in SUTD,
Electrical Systems Design, Singapore. His research
interests include FACTS, HVDC, and Real-time
digital simulation of power electronics and power
systems.
11
M. Janaki (M’12) received her Ph.D. degree in
the Department of Electrical Engineering, JNTU
Hyderabad and M.E degree from College of Engineering, Anna University, Guindy, Chennai. She is
an Associate Professor in the School of Electrical
Engineering at VIT University, Vellore, India. Her
research interests include FACTS, HVDC, and power systems.
Yunjian Xu (S’06-M’10) received the B.S. and
M.S. degrees in electrical engineering from Tsinghua
University, Beijing, China, in 2006 and 2008, respectively, and the Ph.D. degree from the Massachusetts
Institute of Technology (MIT), Cambridge, MA,
USA, in 2012.
Dr. Xu was a CMI (Center for the Mathematics
of Information) postdoctoral fellow at the California
Institute of Technology, Pasadena, CA, USA, in
2012-2013. He joined the Singapore University of
Technology and Design, Singapore, as an assistant
professor in 2013. His research interests focus on energy systems and markets,
with emphasis on power system control and optimization, wholesale electricity
market design, and the aggregation of distributed energy resources in power
distribution systems.
Dr. Xu was a recipient of the MIT-Shell Energy Fellowship.