Lecture 8: Mechanical Vibration Energy Method = T
advertisement

Lecture 8: Mechanical Vibration
Discrete systems
Energy method
Lumped-parameter analysis
» 1 d.o.f.
» Multi-d.o.f. (Eigenvalue analysis)
Continuous systems
Direct solving of partial differential equations
Rayleigh’s method (the energy approach)
Example: a laterally-driven folded-flexure comb-drive
resonator
Reference: Singiresu S. Rao, Mechanical Vibrations, 2nd Ed., Addison-Wesley
Publishing Company, Inc., 1990
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
1
Energy Method
Conservation of energy; the maximum kinetic energy is equal to
the maximum potential energy: Tmax = Vmax
Also known as Rayleigh’s energy method
Example: Effect of spring mass ms on the resonant frequency ωn
Kinetic energy of spring length dy:
dTs =
y
dy
l
Total kinetic energy:
k
T=
m
x(t)
ENE 5400
༾ᐒႝسी, Spring 2004
2
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
1
Cont’d
The total potential energy:
U=
1 2
kx
2
By assuming a harmonic motion x(t) = X⋅⋅ cosω
ωnt,
m
1
(m + s ) X 2ωn2
2
3
1
U max = kX 2
2
By equating Tmax = Vmax,
Tmax =
ωn =
ENE 5400
༾ᐒႝسी, Spring 2004
k
m + ms / 3
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
3
Lumped-Parameter Model
L-shape spring
=?
x
k
k
m
k
k
Simplified description of 3D physical model using minimum
required number of variables (coordinates)
Do we have “mass-less” spring? A valid assumption?
Can consist of a set of ordinary differential equations depending
on the number of variables
In “Linear Control Systems”, we call them the state-space
equations
ENE 5400
༾ᐒႝسी, Spring 2004
4
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
2
Degree of Freedom
x1
k1
k3
k2
m1
m2
m1
2 degree of freedom system
1 degree of freedom system
x2
x1
k1
k2
The minimum number of independent coordinates required to
determine completely the positions of all parts of a system at
any instant of time defines the degree of freedom of the system
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
5
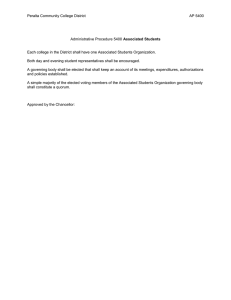
Equations of Motion for a 2 D.O.F. System
F1(t)
x1(t)
k1
F2(t)
k3
m2
m1
b1
x2(t)
k2
b2
b3
m1&x&1 =
m2 &x&2 =
ENE 5400
༾ᐒႝسी, Spring 2004
6
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
3
Equations of Motion for a 2 D.O.F. System
r
r
r
r
[ m ]x&& + [ b ]x& + [ k ]x = F
0
b1 + b2
m1
[m ] =
, [ b ] =
m2
0
− b2
F1
F=
F2
− b2
k 1 + k 2
, [ k ] =
b2 + b3
− k2
− k2
k 2 + k 3
In addition to the free-body diagram, equation of motion can also be
derived through the Lagrange’s equation from the energy perspective
ENE 5400
༾ᐒႝسी, Spring 2004
7
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
Solving of Dynamic Equation
Gives complete transient response under
Free vibration: without external applied force
» How can a structure move without a force?
» Natural frequency and damped natural frequency can be
obtained
Forced vibration: with external applied force
Motion Types:
» Underdamped
» Critical damped
» Overdamped
Remember how to solve a set of linear ordinary differential
equations for multiple d.o.f. systems?
ENE 5400
༾ᐒႝسी, Spring 2004
8
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
4
Determine Resonant Frequency
Design of micromechanical devices needs to know natural
frequency and damping
To many performance indexes of the transient response,
such as rise time, overshoot, and settling time
Resonant frequencies of a lumped-parameter mechanical
system can be obtained by
Solving the eigenvalue problem (exact solution)
Rayleigh’s Method (approximate solution)
etc
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
9
Eigenvalue Problem
Under free vibration and no damping, natural frequencies of a
multi-d.o.f system are solutions of the eigenvalue problem
r
Let x = x sin(ωt ), then
r
[[ K ] − ω2 [ M ]] x = 0
⇒ ∆ = [[ K ] − ω [ M ]] = 0
mω
× [ K ] ⇒ [[ I ] − ω [ K ] [ M ]] = 0 , [[ I ] −
[ D ]] = 0
k
x ≠ 0,
2
−1
2
{
2
−1
α
The roots αi = mω
ωi2/k, so ωi can be solved
The eigenvector corresponding to the individual eigenvalue is the
mode shape of the system
ENE 5400
༾ᐒႝسी, Spring 2004
10
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
5
Example
From the free-body diagram:
k1
m1
x1
k2
m2
x2
k3
m3
x3
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
11
Cont’d
Let m1 = m2 = m3 = m, k1 = k2 = k3 = k, and ω = √(k/m):
m1
0
0
0 &x&2 + − k 2
m3 &x&3 0
−
− k2
0
k2 + k3
− k3
x1
− k 3 x2 = [ 0 ]
k3 x3
0 0 &x&1
− 1 0 x1
2
&
&
1 0 x2 + k − 1 2 − 1 x2 = [ 0 ]
0
0 1 &x&3
− 1 1 x3
−1 0
1 0 0
2
2 − 1 − ω m 0 1 0 = 0
2
⇒ k −1
0
ENE 5400
k1 + k 2
0
1
⇒m 0
0
⇒ I
&x&1
0
m2
0
−1
0
1
−1
0 1
{14444244443
mω
k
α
2
2
−1
0
−1
2
−1
༾ᐒႝسी, Spring 2004
0
− 1
1
1
0
0
D
12
0 0
1 0 = 0
0 1
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
6
Cont’d
αι = mωωi2/k, solve:
mω12
k
α1 =
= 0.19806, ω1 = 0.44504
k
m
α2 =
mω 22
k
= 1.55530, ω 2 = 1.2471
k
m
mω 32
k
α3 =
= 3.24900, ω 3 = 1.8025
k
m
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
13
Cont’d: Mode Shapes
For each solved ωi, recall
that:
r r
[[ K ] − ωi2 [ M ]] x = 0
2
k −1
0
2
= k − 1
0
−1
2
−1
0
− 1 − (
1
−1
2
−1
αi k
m
0
1
) ⋅ m 0
0
1
− 1 − α i 0
0
1
0 0 x1i
1 0 x2i
0 1 x3i
0 0 x1i
1 0 x2i = 0
0 1 x3i
We can solve the eigenvector xji with respect to
each αi
ENE 5400
༾ᐒႝسी, Spring 2004
14
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
7
Cont’d: Mode Shapes
1st mode, α1 = 0.19806
1. 0
x = x 1 1.8019
2.2470
r1
r 1
2nd mode, α2 = 1.5553
3rd mode, α3 = 3.2490
r2
1 .0
1.0
x = x 1 − 1.2468
0.5544
r3
ENE 5400
x = x 1 0.4450
− 0.8020
r2
༾ᐒႝسी, Spring 2004
r3
15
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
Vibration of Continuous Systems
A system of infinite degrees of freedom
The equation of motion may be described by a partial differential
equation which can be solved by the method of separation of
variables
Many methods can be used to find approximate resonant
frequencies and mode shapes (e.g. the Rayleigh’s method)
ENE 5400
༾ᐒႝسी, Spring 2004
16
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
8
Example: Lateral Vibration of Beams
y
f(x,t)
f(x,t): force per unit length
y(x,t)
x
M(x,t)
Free-body
diagram
M(x,t) + dM(x,t)
x
O
L
O’
V(x,t)
y(x,t)
V(x,t) + dV(x,t)
dx
What is the dynamic equation?
The inertia force (i.e. f = ma):
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
17
Example: the Lateral Vibration of Beams
The sum of moments around the
point O is ZERO
M(x,t) + dM(x,t)
M(x,t)
O
Substitute V = ∂M/∂
∂x into the last
equation:
y(x,t)
V(x,t)
O’
dx
V(x,t) + dV(x,t)
∂ 2 M ( x ,t )
∂ 2 y( x , t )
+ f ( x , t ) = ρA( x )
2
∂x
∂t 2
∂2
∂ 2 y( x , t )
] + f ( x ,t ) = ρA( x )
− 2[
∂x
∂t 2
4
2
∂ y( x , t )
∂ y( x , t )
EI
+ ρA
= f ( x ,t )
4
∂x
∂t 2
−
For a uniform beam:
ENE 5400
༾ᐒႝسी, Spring 2004
18
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
9
Example: Lateral Vibration of Beams
For free vibration, f(x,t) = 0, we require
4
2
Two initial conditions, for example: EI ∂ y ( x4 , t ) + ρA ∂ y ( x2 , t ) = 0
∂x
∂t
» y(x, t = 0) = yo(x) = 0
» ∂y/∂
∂t|(x, t = 0) = 0
Four boundary conditions, for example:
» Free end
∂x2) = 0
– Bending moment = EI(∂
∂2y/∂
3
3
∂x = 0
– Shear force = EI∂
∂ y/∂
We will use these two
» Simply supported (pinned) end
b.c.’s to solve for the
– Deflection y = 0
Fixed-pinned beam
∂x2) = 0
– Bending moment = EI(∂
∂2y/∂
» Clamped end
– Deflection y = 0
– Slope ∂y/∂
∂x = 0
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
19
Solve Lateral Vibration of Beams
Use the method of separation of variables y(x,t) = Y(x)⋅⋅ T(t)
d 4Y ( x )
d 2T (t )
AY
x
+
=0
(
)
ρ
dx 4
dt 2
EI / ρA ∂ 4Y ( x )
1 d 2T (t )
=
−
= a = ω2
Y ( x ) ∂x 4
T (t ) dt 2
EIT (t )
(3)
(2)
ENE 5400
༾ᐒႝسी, Spring 2004
20
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
10
Solve the Lateral Vibration of Beams
Y(x) can be solved as:
Y ( x ) = C1e βx + C2e − βx + C3e iβx + C4e − iβx
Or,
Y ( x ) = C1 cos β x + C2 sin β x + C3 cosh β x + C4 sinh β x
The natural frequencies of the beam are (from (1)):
ω = β2
EI
EI
= ( β l )2
ρA
ρAl 4
The βl product depends on the boundary conditions
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
21
Solve Lateral Vibration of a Fixed-Pinned
Beam
Four B.C.’s for a fixed-pinned beam are substituted into Y(x):
⇒ C = −C
β( C + C ) = 0 ⇒ C = −C
Y (0) = 0
C1 + C3 = 0
dY
(0) = 0
dx
Y (l ) = 0
EI
2
0
1
4
C1(cos β l − cosh βl ) + C2 (sin β l − sinh βl ) = 0 (5)
− C1(cos βl + cosh β l ) − C2 (sin βl + sinh β l ) = 0 (6 )
cos βl − cosh β l
So,
− (cos βl + cosh βl )
ENE 5400
2
∴Y ( x ) = C1 (cos βx − cosh βx ) + C2 (sin β x − sinh β x ) (4 )
d 2Y
(l ) = 0
dx 2
14243
4
3
༾ᐒႝسी, Spring 2004
22
sin βl − sinh β l
= 0 (7 )
− (sin β l + sinh βl )
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
11
Cont’d
From the last matrix, we get the determinant:
tan βl = tanh β l
The many roots of this equation, β nl, will define the natural frequencies:
ωn = ( β n l )2
EI
ρAl 4
Mode shape: Yn(x), Y(x), yn(x,y), and y(x,t):
C2 n = −C1n (
cos β n l − cosh β n l
),
sin β nl − sinh β nl
from (5)
Yn ( x ) = C1n [(cos β n x − cosh β n x ) − (
cos β n l − cosh β n l
)(sin β n x − sinh β n x )], from (4 )
sin β n l − sinh β n l
yn ( x , t ) = Yn ( x )( An cos ωn t + Bn sin ωn t )
y( x ,t ) =
∑ y ( x ,t ),
∞
ENE 5400
n
The final mod e shape
༾ᐒႝسी, Spring 2004
n =1
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
23
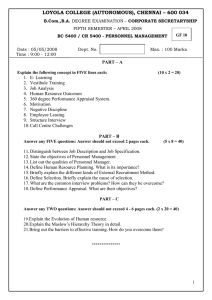
Results of β nl for Various Beam Constraints
β1l = 1.875104
β2l = 4.694091
β3l = 7.854757
β4l = 10.99541
(1) Cantilever beam
(2) Doubly-clamped beam
β1l = 4.730041
β2l = 7.853205
β3l = 10.995608
β4l = 14.137165
(3) fixed-pinned beam
β1l = 3.926602
β2l = 7.068583
β3l = 10.210176
β4l = 13.351768
ENE 5400
༾ᐒႝسी, Spring 2004
24
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
12
Rayleigh’s Method
An approximate analysis using the energy perspective to find the
fundamental natural frequency of continuous systems
The kinetic energy of a beam:
T=
Assume a harmonic variation y(x,t) = Y(x)⋅⋅ cos(ω
ωt), the maximum
kinetic energy:
Tmax =
ENE 5400
ω2
2
༾ᐒႝسी, Spring 2004
l
∫0 Y
2
( x )ρA( x )dx
25
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
Cont’d
The potential energy V of a beam: (neglecting the work done by
the shear forces)
The maximum value of y(x,t) is Y(x), so the maximum potential
energy:
Vmax
ENE 5400
1 l
d 2Y ( x ) 2
= ∫ EI (
) dx
2 0
dx 2
༾ᐒႝسी, Spring 2004
26
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
13
Rayleigh’s Method
By equating Tmax to Vmax, we obtain:
d 2Y ( x ) 2
) dx
∫0
dx 2
ω2 =
l
2
∫ ρAY ( x )dx
l
EI (
0
For example, a stepped beam with various cross sections:
l2
d 2Y ( x ) 2
d 2Y ( x ) 2
E
I
(
)
dx
+
E
I
(
) dx +
∫0 1 1 dx 2
∫l1 2 2
dx 2
ω2 =
l1
l2
2
2
∫ ρA1Y ( x )dx + ∫ ρA2Y ( x )dx +
l1
0
l1
L
L
Where is Y(x) from? You have to choose Y(x), and make sure: (1)
it is a reasonable beam deflection curve; (2) Y(x) must satisfy the
beam boundary conditions
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
27
Example: Find the Resonant Frequency
Use the deflection curve Y(x) = (1 – x/l)2
The cross section A(x) = hx/l
The moment of inertia I(x) = 1⋅⋅(hx/l)3/12
By equating Tmax to Vmax
y
anchored
ω =
2
1
h
x
l
The exact frequency is (for comparison):
ω = 1.5343(
ENE 5400
༾ᐒႝسी, Spring 2004
28
Eh 2 1 / 2
)
ρl 4
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
14
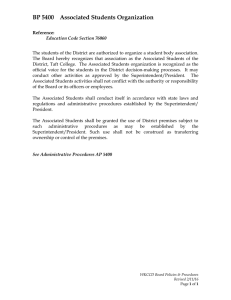
Lateral Folded-flexure Comb-Drive
Resonator
What is the resonant frequency of the resonator?
A lumped-parameter model would be used for analysis
Source: William Tang, Ph.D. Dissertation, UC Berkeley, 1990
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
29
Spring Constant kx
When the resonant plate moves
Xo under a given force Fo, the
point B and D moves Xo/2,
respectively
The force acting on each
beam is Fo/4
The slope at both ends of the
beams are identically zero
truss
beam
anchor
plate
ENE 5400
༾ᐒႝسी, Spring 2004
30
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
15
Cont’d
The deflection curve of beam
AB is:
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
31
Lateral Resonant Frequency
By Rayleigh’s energy method:
K .E .max = P.E .max
K .E .max = K .E .plate + K .E .truss + K .E .beam
=
1
1
1
M p v 2p + M t vt2 + ∫ vb2 dM b
2
2
2
=
For the beam segment AB, remember that:
x AB (y ) =
(Fx / 4 ) ( 2
3Ly − 2y 3 )
12EI z
x AB (L ) = X o / 2 =
⇒
ENE 5400
x AB (y ) =
−
for 0 ≤ y ≤ L
Fx L3
48EI z
2
3
Xo y
y
3 − 2
2 L
L
༾ᐒႝسी, Spring 2004
32
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
16
Cont’d
So the velocity profile for segment AB (multiply ω) is:
v AB ( y ) =
X oω y
y
3 − 2
2 L
L
2
3
The K.E. for beam AB is:
1 L ( X o ω) y
y
3 − 2
2 ∫0
4 L
L
2
2
K .E . AB =
3 2
14444244443
dM AB
v 2AB
ENE 5400
=
X o2 ω2 M AB
8L
=
13 2 2
X o ω M AB
280
y
∫0 3
L
L
༾ᐒႝسी, Spring 2004
2
y
L
− 2
3 2
dy
dM AB
=
M AB
⋅ dy
L
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
33
Cont’d
Similarly for beam CD, the
deflection curve is:
xCD ( y ) = X o + (− x AB ( y )) = X o 1 −
truss
2
3 y y
+
2L L
3
beam
y
The velocity profile and K.E. for
segment CD are:
vCD ( y ) = X o ⋅ ω1 −
K .E . CD =
=
ENE 5400
2
3 y y
+
2 L L
X o2 ω2 M CD
2L
L
∫0
1 −
3
anchor
2
3 y y
+
2 L L
3
2
dy
plate
83 2 2
X o ω M CD
280
༾ᐒႝسी, Spring 2004
34
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
17
Cont’d: Total Beam Potential Energy
Since,
1
Mb
8
K .E .b = 4 ⋅ K .E .AB + 4 ⋅ K .E .CD
13 2 2
83 2 2
=
X oω Mb +
X oω Mb
560
560
6 2 2
=
X o ω Mb
35
M AB = MCD =
⇒
ENE 5400
༾ᐒႝسी, Spring 2004
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
35
Cont’d
The total maximum K.E. is
K .E .max = K .E .plate + K .E .truss + K .E .beam
1
6
1
= X o2ω 2 M p + Mt +
Mb
2
8
35
The total maximum P.E. is:
P .E .max = ∫
Xo
0
Fx ⋅ dx = ∫
Xo
0
k x x ⋅ dx =
1
k x X o2
2
Equating both equations, we obtain the resonant frequency:
ω=
ENE 5400
༾ᐒႝسी, Spring 2004
kx
Mp +
1
12
Mt +
M
4
35 b
36
ᐽӛԋǴ
ᐽӛԋǴమεᏢႝᐒس
18