ω ω α θ θ ω ω θ θ ω α ω ω α θ ω ω α θ ω ω α θ π π θ ω
advertisement

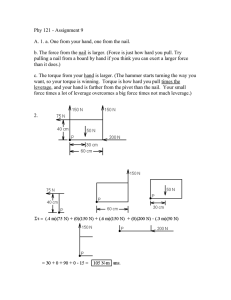
HW#8b Note: numbers used in solution steps can be different from the question part. You can practice the methods in 7 Page 1 of the solution and verify with the numbers and answers given in the question part. Or you should practice the methods in the solution and verify your calculation with numbers in your webassign. Problem 1 = Walker P. 10-06. A spot of paint on a bicycle tire moves in a circular path of radius 0.28 m. When the spot has traveled a linear distance of 1.23 m, through what angle has the tire rotated? Give your answer in radians. s θ rad r Solution. The distance moved s is related to the angle θ and the radius r by s = rθ . So the angle (in radians) is Insight: How many degrees is 4.39 radians? 4.39 radians is how many percentage of a full revolution? Problem 2 = Walker P. 10-16. After fixing a flat tire on a bicycle you give the wheel a spin. (a) If its initial angular speed was 7.32 rad/s and it rotated 14.5 revolutions before coming to rest, what was its average angular acceleration? ω0 -0.294 rad/s2 (b) For what length of time did the wheel rotate? 24.9 s ω Solution. The equations for motion with uniform angular acceleration α are very similar to those for uniform linear acceleration a. Here they are: ω = ω0 + α t (1) ( 2 ) θ = θ0 + 12 (ω + ω0 ) t ( 3) θ = θ0 + ωt + 12 α t 2 ( 4 ) ω 2 = ω02 + 2α∆θ (a) We have the initial and final angular velocities and the angular distance; so we use the notorious "equation four:" ω 2 = ω02 + 2α∆θ giving 2 2 ω 2 − ω02 ( 0 ) − ( 7.32 rad/sec ) α= = = −.2941 rad/s 2 2∆θ 2 (14.5 * 2 * π rad ) (b) Now for the time, we can just take the angular distance, divided by the average angular velocity: (14.5 * 2 * π rad ) ∆θ = 1 = 24.89 s t= ωaverage 2 ( 7.32 rad/sec ) Do you remember that for constant acceleration, average velocity is the average between the initial velocity and the final velocity? It is also true for rotation. And displacement = average velocity * time. Keep in mind that final angular velocity is zero when it stops. So that average angular velocity is ½ of initial angular velocity. You can also use equation 1 to find time, after you find angular acceleration. Insight: The greater the friction is the larger the torque and the α is, and the sooner the wheel will stop. HW#8b Problem 3= Walker P. 10-33. As Tony the fisherman reels in a "big one" he turns the spool on his fishing Page 2 reel of 7 at the rate of 2.8 complete revolutions every second (Figure 10-21). (a) If the radius of the reel is 3.8 cm, what is the linear speed of the fishing line as it is cm/s reeled in? (b) How would your answer to part (a) change if the radius of the reel were tripled? the linear speed would increase by a factor of 9 the linear speed would decrease by a factor of 9 v the linear speed would decrease by a factor of 3 the linear speed would increase by a factor of 3 ω Explain. r Solution. (a) The relation between the speed v at the rim of the reel, its radius r, and the angular velocity ω, is ⎛ 2π radians ⎞ v = rω = ( 0.038 m )( 2.8 turns/sec ) ⎜ ⎟ = 0.669 m/s=66.9 cm/s . ⎝ one turn ⎠ (b) The speed is seen to be proportional to the radius. So increasing the radius by a factor of 3 will triple the linear speed of the line for the same rotation rate - this is the fourth choice. There is no square relation between speed v and radius r. It is a linear relation. Insight, if the fish is 6.7 meter away, it will take 10 seconds to reel. A larger reel would be faster. Problem 4 = Walker P. 10-18. A discus thrower (arm length 0.9 m) starts from rest and begins to rotate with a constant angular acceleration of 3.5 rad/s2. (a) How many revolutions does it take for the discus thrower's angular speed to reach 6.3 rad/s? seconds (b) How much time does this take? At this time (from part b), please find the following quantities: (c) the linear speed of the discus: m/s m/s2 (d) the size of the discus's tangential acceleration: m/s2 the size of the discus's centripetal acceleration: the size of the discus's total acceleration: m/s2 the angle that the total acceleration makes with the velocity vector is: degrees Solution. (a) Again we use equation ω 2 = ω02 + 2α∆θ ∆θ = 5.67 rad. Giving 6.32 = 0+2*3.5*∆θ , (b) For the time we can use ω = ω0 + α t Giving 6.3 = 0 + 3.5 t; t=1.8 s c) At this time, vt = 0.9 *6.3= 5.67 m/s Tangential velocity (linear velocity) = angular velocity* radius. d). at = 0.9*3.5= 3.15 m/s2 Notice that since α is constant, at is constant. HW#8b Page 3 of 7 = 6.32 *0.9 =35.7 m/s2 Notice that since vt and ω increases, acp increases. Here we calculate the acp at time=1.8s when ω=6.3 rad/s Tangential acceleration is perpendicular to the centripetal acceleration. , Total acceleration: m/s2 , Angle between the total a and at = sin-1 (acp / a) = tan-1 (acp / at) = 85 degree Problem 5, To tighten a spark plug, it is recommended that a torque of 13.8 N·m be applied. If a mechanic tightens the spark plug with a wrench that is 25.6 cm long, what is the minimum force necessary to create the desired torque? 53.9N Solution: To apply the minimum force and get the same amount of torque, you want to maximize the moment arm length. When you apply the force perpendicular to the wrench as Force A shown in the lecture notes, you get the longest moment arm which is equal to the wrench length. If you apply force in any other direction, your moment arm will be less than the wrench length. moment arm = length * sin (angle between force and the wrench). τ = rmax * Fmin Fmin = τ/ rmax = 13.8/0.256 = 53.9 (N), Remember to convert length into SI unit meter first. Problem 6, Equilibrium : Total torque = 0; Total Force = 0 F1+ F3 - F2 = 0 For torque, remember that torque is related to the rotation center. Same force provides different torque respect to different rotation center. Let’ choose the left end as rotation center first, Respect to the left end, Torque of force 1 is 0, because this force goes through the rotation pivot. Moment arm length = 0 Torque of force 2 is negative F2* r2 , Moment arm r2 = total length *1/4, F2 makes it to rotate clockwise, so the torque is negative. HW#8b Torque of force 3 is positive F3* r3 , Moment arm r3 = total length , F3 makes it to rotate clockwise, so the 4 of 7 Page torque is negative. r3/r2=1/(1/4) = 4 So: 0 + (- F2* r2 ) + F3* r3 = 0 You can solve it and get F2 = F3* r3 / r2 = 3*10/2.5=12 N Plug F2 into the total force = F1+ F3 - F2 =0 equation, you can find F1 = F2-F3= 12-3 = 9 N Attention: Static equilibrium means that the total torque respect to any possible pivot is zero, so that it will not rotate respect to any pivot. You should get the same result if you choose the right end or the location of force 2 to be the pivot. TRY THAT. In this question there is no mass or gravity need to be considered. You can consider this figure to be a top view on a frictionless table. Use a pencil to try this game with your friend on a table to see how the 3 forces balance to get both total force and total Torque = zero. Problem 7. (See Walker P. 11-91 for another take on the bones in the arm.) Below is a diagram of a baseball/forearm system at rest. It is acted on by four different forces: the weight of the forearm, the weight of the baseball, the bicep force, and a force from the upper arm bone (attached at the elbow). Use the following values: length of forearm = L = 14 cm elbow to bicep distance = d = 3 cm mass of forearm = M = 4 kg mass of baseball = m = 2 kg a.) Based on torque considerations, you can reason that the force of the the combined weight of the bicep must be baseball/forearm. Explain. b.) How large is the force exerted by the bicep? N c.) The force exerted by the upper arm bone (not shown above) on the N, forearm must be: Solution. (a) Considering torques about the pivot point indicated, it is clear that the bicep force must be larger than the others, since its moment arm, d, is so small compared to the length of the arm. bicep pivot point M 0 (b) Total torque = 0. d m L L/2 Fbicep Fbicep *d - Mg*(L/2) – mg*(L) = 0 Or it can also be explained as that the counterclockwise torque caused by the bicep force must just equal the sum of magnitude of the two clockwise (negative) torques due to M and m: Fbicep d = Mg Mg L + mgL 2 mg HW#8b giving Page 5 of 7 L + mgL ( 4 kg )( 7 cm ) + ( 2 kg )(14 cm ) 2 Fbicep = = ( 9.8 m/s 2 ) = 182.9 N d ( 3 cm ) (Notice that we could take the luxury of giving the distances in centimeters, since they enter in the form of a ratio and the units cancel out. If you are not good at this, convert them to SI unit first.) Actually, real lower arms are much longer than 14 cm and the F_bicep would be much larger. Mg (c) Don’t forget the total force also needs to be zero: Since Fbicep is greater than weight of arm and baseball, the force from the bone must be downward to balance Fbicep and make the total force = 0. Fbicep – Mg – mg – Fbone =0 The answer is 124.1 N downwards. Supersized? Thinking the bone is acting force upward? Ok, imagine that the upper arm bone is not rigid, but soft like a rope. That means the bone can act force upward only (like pulling up as a rope in the position of the bone), but the bone can not push downward as a rigid rod, what’s going to happen to that “soft bone” when the strong mussel next to it is pulling upward with such a huge force? You can use to rigid rods to make a model of upper arm and lower arm. But imagine changing the upper arm part into something soft so that it can not push downward as a rigid rod, what is going to happen to your arm model? Now you realize while mussels pulling upward, the bones often need to push downward to keep everything in position and to keep the total force balanced for equilibrium. Problem 8 = Walker P. 11-20. To determine the location of his center of mass, a physics student lies on a lightweight plank supported by two scales L = 4.30 m apart, as indicated in the figure below. F1 center of rotation F2 M 0 x Mg (a) If the left scale reads 258 N, and the right scale reads 115 N, find the student's mass. (b) Find the distance from the student's head to his center of mass. L kg m Plank+man=system. Plank has no mass. The person has mass. Take mass to be concentrated at person’s center of mass. Force of gravity acts there. Scales exert upwards forces on plank/person to keep from getting smashed. Forces are perpendicular to, away from surfaces. In other words, they’re normal forces. Also, remember that scales read normal forceÆhow hard the scale needs to push to keep itself from getting smashed. Solution. (a) The student's weight must be equal to the sum of F1 and F2: F + F2 ( 258 N ) + (115 N ) Mg = F1 + F2 ⇒ M = 1 = = 38.1 kg g ( 9.8 m/s2 ) (Must be a little kid. ) (b) Lets use the left end to be the rotation point: Balance of torques about the rotation point at the left end requires HW#8b counter-clockwise torques = clockwise torques F2 L = Mgx Page 6 of 7 giving F2 L (115 N )( 4.30 m ) = = 1.326 m Mg ( 373 N ) Remember to round off your final results in exams as instructed. Important: There is nothing special about the left end as pivot. Could have used the right end and get the same answer. Try it. x= Problem 9, Note: Please be careful with roundoff error in this problem.) The drawing shows a collision between two pucks on an air-hockey table. Puck A has a mass of 2.8 kg and is moving along the x axis with a velocity of +5.5 m/s. It makes a collision with puck B, which has a mass of 6.3 kg and is initially at rest. After the collision, the two pucks fly apart with the angles shown in the drawing. (a) Find the final speed of: puck A: 3.38m/s puck B: 2.26m/s (b) Find the kinetic energy of the A+B system: before the collision: 42.3J 32.2J after the collision: (c)What type of collision is this? Solution: This is a reply of one important question from HW 8a. I already gave detailed solutions last time. If your math is great, and you like to derive equations, I give you the following same solution in slightly different format: We have to set up conservation of momentum. There are two unknowns - the two final speeds - and two equations - conservation of momentum in the x and y directions. The variables are defined in the diagram below. The equations for conservation of momentum are v1 x : mA v0 = mA v1 cos θ + mB v2 cos φ y: 0 = mA v1 sin θ − mB v2 sin φ y (You can start to plug in numbers and simplify the equations, if you are not good at the following math. ) θ v0 We can use the second equation to eliminate v2: x φ substituting into the first equation and solving for v1: m v sin θ mA v0 = mA v1 cos θ + A 1 cos φ sin φ m v sin θ cos φ = mA v1 cos θ + A 1 sin φ = mA v1 ( cos θ + sin θ cos φ ) v2 HW#8b or Page 7 of 7 Then the y equation can be used to find v2: For those who have difficulty to derive equations, it is better to do it step by step as the previous instruction. No matter what, these kinds of conclusion equations are useless to memorize. You will panic and get all confused when it changes a little bit. These conclusion questions are only valid for object B was at rest to start with and object A moves to up-right in stead of bounce to up-left after collisions. You need to understand the physics and math. Be able to use the fundamental physics laws, instead of memorizing special conclusions. And those memorized results will also NOT be credited in exams.