Improvements in knock control
advertisement

Improvements in Knock Control
U. Lezius∗ , M. Schultalbers∗ , W. Drewelow† , B. Lampe†
∗ IAV
† University
GmbH, Gifhorn, Germany
of Rostock/Institut of Automation, Rostock, Germany
Abstract—
The aim of this work is to develop an improved method for
knock control in gasoline engines. This should enable higher
power output compared to existing methods of knock control
without raising the level of knock probability. An analysis
of a known knock controller shows, that information about
distance to knock limit is not used in knock control. Based on
this analysis a design of a new knock controller is developed.
This controller uses cylinder-pressure signals to estimate the
distance to knock limit and to control ignition angle. An
improvement in power output is proven using engine tests.
I. I NTRODUCTION
Engine knock is an irregular combustion phenomenon,
which can occur in spark ignited gasoline engines. After
spark ignition has started the regular combustion, a flame
front propagates through the combustion chamber. Heat
release during combustion stroke causes pressure and
temperature inside the cylinder to increase. High cylinder
pressure compresses the unburned gas fraction too. If
temperature and pressure in the unburned gas zone reach
a critical level, chemical kinetic mechanisms can cause
autoignition, even before the gas is burned by the regular
flame front.
80
&'()
&*&'+)
70
60
%
Knocking combustion is known to damage the engine.
In [1], [2], [3] and [4] examples for engine failures caused
by knock are given. To avoid knocking combustion,
usually ignition timing is retarded. This means to decrease
not only knock probability but power output of the engine
too. Hence an acceptable trade-off between high poweroutput and safe engine operation has to be found. To
achieve this, modern production car engines are equipped
with a knock sensor (acceleration sensors or in-cylinder
ion-current sensors) and a knock controller. Since the
knock sensor provides information only under knocking
conditions, it is assumed that the trade-off situation can be
improved, if additional information about the combustion
cycle is applied.
Section II of this paper gives a short introduction
into knock detection and knock control. A method to
estimate a distance to the knock limit is developed in
section III. A new algorithm to control knock based
on this distance is shown in section IV. In section V
the performance of basic knock controllers and distancebased knock controllers is compared.
II. C ONVENTIONAL A PROACH TO K NOCK C ONTROL
Often measured knock signals are evaluated in time
domain [5], [6]. Usage of time windows allows selection
of single combustion events. Bandpass filters suppress
noise. The windowed and filtered knock signal x is used
to calculate a knock intensity value yki , e.g.
yki = max (|x(n)|) .
" #$
!
If knock intensity exceeds a threshold value y0 , the
combustion cycle is regarded as knocking. The knock
controller uses knock intensity as an input signal to
control ignition timing so that a certain knock rate is not
exceeded.
40
30
(1)
n
50
20
10
yki (q)
0
−40
−20
0
20
40
60
80
αkc (q)
yki (q − 1)
αign (q)
100
−
αkc (q − 1)
Fig. 1.
cycles
Cylinder pressure signals during knocking and non-knocking
y0
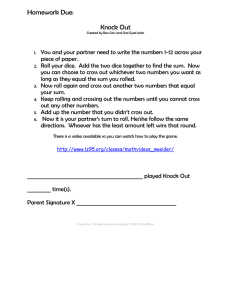
Autoignition causes very fast chemical reactions and
heat release. This impulse excites oscillations of the gas in
the combustion chamber. Figure 1 shows cylinder pressure
signals of a knocking and a non-knocking combustion cycle. Knocking cylinder pressure signal shows oscillations
which superimpose on the regular non-knocking pressure
signal.
Fig. 2.
αb (q)
Basic knock control based on the detection of knock events
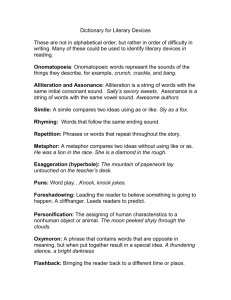
Figure 2 shows the structure of a basic knock controller
[4]. Ignition angle αign is the sum of knock controller
output αkc and base ignition angle αb . If a knocking
combustion occurs, controller retards αkc for the next
combustion cycle (q + 1). Retardation step size is set by
Kn . If no knock occurs ignition angle is advanced in
small steps Kp . Control law can be expressed as:
(
αkc (q − 1) − Kn , if yki (q − 1) ≥ y0
.
αkc (q) =
αkc (q − 1) + Kp , if yki (q − 1) < y0
(2)
The actuator signal αkc shows typical saw-tooth oscillations. These oscillations are caused by the nonlinear control
algorithm and can be considered as auto-oscillations.
III. D ISTANCE TO K NOCK L IMIT
Basic knock controllers as shown in section II use
knock intensity to control ignition angle. There is no
information about the current distance to knock limit
available. This is why knock controllers usually retard
ignition angle a large step after knocking combustion
cycles but only slowly advance ignition angle if no knock
occurs. These periods of retardation cut down the torque
output of the engine. Knock control algorithm could be
improved if an error signal showing the distance to the
knock limit was available.
Evaluation of resonant knock oscillations is not suitable
to calculate such a distance value. While the engine is
operated in non-knocking mode, knock intensity signal
generally shows values close to zero. Even if the ignition
angle (and the distance to knock limit) is changed there
is almost no change in knock intensity (figure 3). To
calculate the distance to knock limit it is neccessary to
take causes for knock into account.
This section shows how to determine a knock limit and
to calculate the distance between any combustion cycle
and this limit. This information will be fed into an new
improved knock controller. The low-pass filtered cylinder
pressure signal is used to calculate its maximum value
pmax . The high-pass filtered cylinder pressure signal is
used to calculate knock intensity pki .
Figure 3 shows relations between ignition angle αign
and knock intensity pki . Since knock intensity values
are usually assumed to be lognormal distributed [7],
measurement data in 3 are shown an a logarithmic scale
too. Advancing the ignition causes knock. By retarding
the ignition knocking combustion can be prevented completely. Within the non-knocking range knock intensity
can not provide any information about the distance to the
knock limit. For the estimation of such a distance value,
other measurement categories should be considered.
In figure 4 the correlation between knock intensity
values pki and cylinder pressure maximum values pmax
is shown. There is a correlation between both signals.
Knocking combustion can occur if cylinder pressure maximum exceeds a certain limit. Larger cylinder pressure
maximum values go together with higher knock intensities. If there is a limit to knock intensity pki , it is
also possible to determine a knock limit to the cylinder
pressure maximum pmax .
Figure 5 shows values of cylinder pressure maximum
pmax and ignition angle αign . The strong correlation
2.5
2
!"$#&%"'
0
;
: 798
1.5
1
−0.5
−1
0.5
0
−10
1
0.8
−5
−1.5
−10
0
2123415 "61 ;
0
−0.5
: 798
0.4
−5
2123415 "61 0
0.6
0.5
−1
0.2
0
−10
Fig. 3.
2.5
(&' )"*,−5+ -".0/
−1.5
−10
0
(&' )*<−5+ -".0/
0
Relationship between ignition angle and knock intensity
"!$#
!
% &(' %*),+ + !$!&.-/
% &(' %*),+ + !$!& 2
1.5
1
0.5
0
25
30
35
40
45
50
55
60
65
Fig. 4. Correlation between cylinder pressure maximum and knock
intensity
between both signals is obvious. It ispossible to fit a
regression line to the data. Using the equation
eα =
dα
· ep ,
dpmax
(3)
a pressure maximum difference ep can be converted into
a ignition angle difference eα .
So far it has been demonstrated that it is possible
to calculate the distance to knock limit by evaluation
of measured cylinder pressure values. Measurement data
of αign , pmax and pki are used to calculate Pearson’s
linear correlation coeficient and Spearman’s rank correlation coefficient [8]. Results are presented in table
Signal 1
αign
αign
pmax
Signal 2
pmax
pki
pki
rpearson
0,94
0,63
0,73
rspearman
0,95
0,82
0,84
TABLE I
C ORRELATION COEFFICIENTS CALCULATED FROM αign , pmax
pki
AND
values of heat release signal (start of heat release,
end of heat release)
• chemical kinetic values [11]
Knock detection enables to find a knock limit for the
calculated low-pass cylinder pressure property. Distance
between properties of the current cycle and the knock
limit is fed into the knock controller which calculates the
actuator signal αkc .
Figure 8 shows the controller structure in more detail.
Cylinder pressure maximum pmax and knock intensity
pki are used as inputs. The smoothed cylinder pressure
values p̃max are compared to the setpoint psp
max . The
resulting distance to the knock limit ep is converted into
an equivalent ignition angle difference eα . The actuator
signal of the controller is αkc .
•
!
"$#& %('
70
60
50
40
30
20
−10
−8
50
−4
−2
0
4
5
647 5
( ! (8
4 60
−6
40
30
20
−9
V. E NGINE T ESTS AND R ESULTS
−8
−7
−6
)+* ,(-/.!01(−432
−5
−3
−2
−1
0
Fig. 5.
Relationship between ignition angle and cylinder pressure
maximum
I. They show advantages of the evaluation of cylinder
pressure maximum over evaluation of knock intensity and
ignition angle. Compared to cylinder pressure maximum
the ignition angle effects knock less directly. Cylinder
pressure maximum is closely correlated to the temperatur
in the unburned gas zone, which is a major cause for the
occurrance of knock. It can be concluded that it is more
evident to determine a knock limit in cylinder pressure
maximum pmax than in ignition angle αign .
IV. N EW A PROACH TO K NOCK C ONTROL
The previous section showed, how to determine a knock
limit and the distance to this limit using cylinder pressure
measuerements. Figure 6 shows a general concept for
a new knock control algorithm. Basic knock control
algorithms use only knock intensity to adjust ignition
angle. This neglects any parameter causing knock. Figure
6 shows several parameters (enginge design, operational
parameters, actuators) which directly influence combustion as well as pressure and temperature in the unburned
gas zone. Using a distance value, knock control can adjust
ignition timing very close to the knock limit. There is no
need to retard ignition angle after a single knock event.
This provides a higher average torque output while knock
probability is not raised.
Such a distance-based knock controller has been presented by the authors in [9] und [10]. Figure 7 shows
a rough structure of this new knock controller. Cylinder
pressure signal p is used on two different paths. A
high-pass filtered signal php is used to detect knocking
combustions. The low-pass filtered cylinder pressure plp
does not contain any resonant oscillations, but can be used
to calculate certain values, e.g.:
• values that describe the shape of cylinder pressure
curve (cylinder pressure maximum, maximum of
derivative of cylinder pressure)
An engine test bed was used to compare the performance of a basic knock control algorithm to a new distancebased controller. The values used as input signals (knock
intensity pki and cylinder pressure maximum pmax ) were
extracted from the measured cylinder pressure signals of
a four cylinder gasoline engine.
index
1
2
4
5
6
controller
distance-based
distance-based
basic
basic
basic
parameters
L = 1, 3
L = 1, 7
Kn = 3, 00◦ , Kp = 0, 75◦ /30
Kn = 2, 25◦ , Kp = 0, 75◦ /30
Kn = 1, 50◦ , Kp = 0, 75◦ /30
TABLE II
T ESTED KNOCK CONTROLLERS
Table II lists the tested controllers. Every controller has
its index which will be referred throughout this section.
design parameters
compression ratio
cooling system
combustion chamber size
combustion chamber design
temperature,
pressure
operation parameters
rotational speed (nD )
octane number
air temperatur (Tair )
coolant temperature (Tc )
additional
measurement
actuators
egr
air mass flow
air-fuel ratio (λ)
ignition angle (αign )
Fig. 6.
combustion
chemical
kinetics
knock
intensity
knock
controller
Concept of a distance-based knock controller
10.2
php
highpass
knock
detection
10
pki
Fig. 7.
calculation
of cylinder
low- plp
pressure
pass
signal
properties
p
9.8
estimation of
distance to
knock limit
controller
9.6
αkc
9.4
9.2
9
Stucture of a distance-based knock controller
0
Fig. 10.
200
400
600
800
1000
1200
1400
1600
Indicated mean pressure for the basic knock controller
pki
calculation psp
max
ep
eα
controller
conversion
αkc
of setpoint
80
−
60
p̃max
20
calculation
of actual
value
pmax
+-,
*
)
&'(
Fig. 8.
Distance-basedknock controller
0
100
200
300
0
100
200
300
400
500
600
700
800
$#400
" % 500
600
700
800
−2
−3
−4
Figure 9 shows examples of knock intensity and actuator signals while using a basig knock controller (index
5). The actuator signal αkc shows large retardation steps
after every single knocking combustion.
Figure 10 shows values of the indicated mean pressure
during compression and combustion stroke pmiH referring
to figure 9. These values can be regarded as a measure
for the torque generated by the combustion during a
single cycle (pumping losses are not considered). pmiH
and αkr are correlated. In can be concluded, that ignition
retardation by knock control significantly reduces torque
output.
Figure 11 shows input signal pmax and actuator signal
αkc of a distance based knock controller. There are no
large retardation steps after knocking combustion cycles.
Figure 12 shows indicated mean pressure during compression and combustion stroke pmiH and knock inten-
!""
40
Fig. 11.
Cylinder pressure maximum and ignition angle for the
distance-based knock controller
sity values pki referring to figure 11. There are only
few knocking combustions. Because distance-based knock
control adjusts ignition angle without large steps, the
indicated mean pressure does not show large variations.
To evaluate the performance of different knock controllers generated torque and resulting knock intensities must
be compared. Table III shows averaged values of indicated
mean pressure during compression and combustion stroke
and knock probability. Figure 13 displays these data graphically. Results show an increased torque output of the
engine if a distance based knock controller is used. In this
case the achieved improvement amounts 0, 15 . . . 0, 3% .
Because the increased torque is achieved without addi-
10.5
"! 1
10
0.5
9.5
9
0
0
500
1000
0
100
200
300
400
500
600
700
800
0
100
200
300
400
500
600
700
800
1500
1
(*)
'
&
#$ %
0
−5
0.5
0
−10
0
200
400
"! +,-.
600
800
1000
1200
1400
1600
Fig. 9. Knock intensity and ignition angle for the basic knock controller
Fig. 12. Knock intensity and indicated mean pressure for the distancebased knock controller
p̄miH
[bar]
12,81
12,80
12,79
12,78
12,76
12,78
12,79
index
1
1
2
2
3
4
5
ᾱzw
[◦ btdc]
16,43
16,41
15,80
15,85
15,61
15,89
16,23
probability
of knock [%]
1,35
1,22
0,47
0,41
0,74
0,94
1,34
p̄ki
[bar]
0,37
0,36
0,26
0,24
0,28
0,29
0,34
number
of cycles
18956
8496
18808
8864
18808
18172
20068
TABLE III
R ESULTS OF CONTROLLER TESTS
12.84
!"
##$%
!##&"'
%
!"(#&"'
12.83
12.82
12.81
12.8
12.79
12.78
12.77
12.76
12.75
0.4
Fig. 13.
0.6
0.8
1
1.2
1.4
Improvement of indicated mean pressure
tional fuel consumption this means the effeciency of the
engine is improved too.
VI. C ONCLUSIONS
Goal of the presented work was to develop a imroved
knock controller.
This should increase torque output of the engine without increasing knock intensity or fuel consumption.
Basic knock controllers react to knocking combustion
by retarding ignition angle. The absence of a distance
or error signal can be seen as a major disadvantage of
these algorithms. This is why a way to calculate such
a distance signal by analyzing cylinder pressure signals
was developed. A new distance-based knock controller
uses this signal to control ignition angle without large
redardation steps. This enables to adjust a more advanced
average ignition angle and to generate a higher torque
output of the engine.
R EFERENCES
[1] F. Pischinger, “Abschlußbericht Sonderforschungsbereich 224 Motorische Verbrennung,” Sonderforschungsbereich 224 an der RWTH Aachen, Tech. Rep., 2001.
[2] H. Holzer, J. Reissing, F.-X. Biermeier, W. Nehse, M. Braunsperger, H. Philip, and E. Kelz, “Lokalisierung von Klopfzentren an
motorradmotoren,” in Klopfregelung für Ottomotoren, ser. Haus
der Technik - Fachbuchreihe, M. Fischer, Ed., no. 31. Expert
Verlag, 2003, pp. 297–313.
[3] R. Freier and P. Kietzell, “Kolbenbelastung durch klopfende
Verbrennung,” in Klopfregelung für Ottomotoren, ser. Haus der
Technik - Fachbuchreihe, M. Fischer, Ed., no. 31. Expert Verlag,
2003, pp. 70–86.
[4] Robert Bosch GmbH, Ed., Ottomotor-Management, 2nd ed.
Braunschweig/Wiesbaden: Vieweg Verlag, 2003.
[5] R. Sloboda and J. Göbels, “Digitale Auswertung von Klopfsensorsignalen und Methoden zur effektiven Klopfregelungsapplikation,”
in Klopfregelung für Ottomotoren, ser. Haus der Technik - Fachbuchreihe, M. Fischer, Ed., no. 31. Expert Verlag, 2003, pp.
174–183.
[6] S. L. Plee and J. D. Naber, “Signal Processing and Accelerometer
Location Techniques for Improved Knock Detection,” in Klopfregelung für Ottomotoren, ser. Haus der Technik - Fachbuchreihe,
M. Fischer, Ed., no. 31. Expert Verlag, 2003, pp. 207–217.
[7] S. E. Ortmann, “Analyse von körperschallsignalen mittels
topologie-selbstanpassender neuronaler klassifikatoren,” Dissertation, Technische Universität Darmstadt, 1999.
[8] J. Hartung and B. Epelt, Multivariate Statisistik, 4th ed. München:
R. Oldenbourg Verlag GmbH, 1992.
[9] U. Lezius, W. Drewelow, and M. Schultalbers, “Potenzial zur
Verbesserung der Klopfregelung in Ottomotoren,” in 2. ASIM
Workshop Wismar — Modellierung, Regelung und Simulation in
Automotive und Prozessautomation, Wismar, 2004, pp. 101–109.
[10] ——, “Vergleich verschiedener Konzepte für die Klopfregelung,”
in 11. Symposium Maritime Elektronik und Elektrotechnik —
Arbeitskreis Steuerungs und Regelungstechnik, Rostock, 2004, pp.
53–57.
[11] D. E. Franzke, “Beitrag zur Ermittlung eines Klopfkriteriums
der ottomotorischen Verbrennung und zur Vorausberechnung
der Klopfgrenze,” Dissertation, Technische Universität München,
1981.
[12] U. Lezius, W. Drewelow, P. Dünow, and M. Schultalbers, “Ansätze
zur Verbesserung der Klopferkennung in Verbrennungsmotoren,”
in 3. Wismarer Automatisierungssymposium, Wismar, 2002.
[13] U. Lezius, W. Drewelow, and M. Schultalbers, “Leistungsvergleich
von Klopfregelungen,” in 4. Wismarer Automatisierungssymposium, Wismar, 2005.