4.7 Ground penetrating radar
advertisement

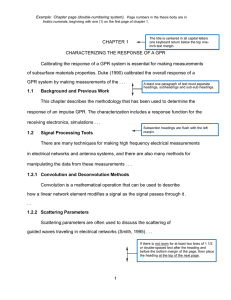
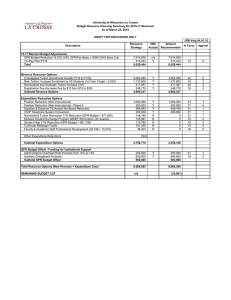
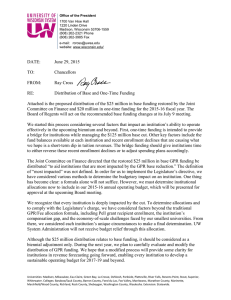
4.7 Ground penetrating radar 4.7 Ground penetrating radar Ground penetrating radar, GPR, is a highresolution geophysical method, which is based on the propagation of high frequency electromagnetic waves. The GPR method images structures in the ground that are related to changes in dielectric properties. In sediments, the water content primarily causes the changes in dielectric properties. Therefore GPR can be used to estimate soil water contents. Over the last decade GPR has been applied in a vast number of sedimentary and geohydrological studies (see table in Neal (2004)), also in glacial environments (Møller & Jakobsen 2002, Jakobsen & Overgaard 2002, Bakker 2004, Møller & Jørgensen 2006). This section on GPR only contains a brief description of the methodology; a detailed description of the GPR method can be found in, e.g., Davis & Annan (1989), Neal (2004) and textbooks (e.g., Reynolds 1997). 4.7.1 Physical base The GPR method operates by transmitting a very short electromagnetic pulse into the ground using an antenna. The centre frequency is typically in the range of 10-2000 MHz. Abrupt changes in dielectric properties cause parts of the electromagnetic energy to be reflected back to the ground surface, where it is recorded and amplified by the receiving antenna. The recorded signal is registered as amplitude and polarity versus two-way travel time (Fig. 4.7.1). The electromagnetic wave propagates in air with the speed of light (0.3 m/ns). In the ground the velocity of electromagnetic waves is reduced since it is dependent on the relative dielectric permittivity, εr, the relative magnetic permeability, μr, and the electrical conductivity, σ. The velocity of electromagnetic waves in a host material is given by: v= c 1 + 1 + (σ ωε )2 ε r μr 2 (4.7.1) where c is the electromagnetic wave velocity in vacuum (0.3 m/ns), ε=εrε0 the dielectric permittivity and ε0 the dielectric permittivity in 12 free space (8.854·10 F/m), ω=2πf the angular frequency, where f is frequency, and the expression σ/ωε is a loss factor. In non-magnetic (μr=1) low-loss materials, such a clean sand and gravel, where σ/ωε ≈ 0, the velocity of electromagnetic waves is reduced to the expression v= c (4.7.2) εr The Equations 4.7.1 and 4.7.2 show that the velocity of electromagnetic waves propagating in the ground is decreased compared to the velocity in the air. In low-loss (i.e. resistive) materials the maximum decrease is a factor of nine, which is the velocity of electromagnetic waves in fresh water (0.034 m/ns). Several processes lead to a reduction of the electromagnetic signal strength. Among the most important processes are attenuation, spherical spreading of the energy, reflection/transmission losses at interfaces and scattering of energy. Scattering is due to objects with a dimension similar to the wavelength and is therefore most pronounced for higher frequencies. Special attention should be drawn to the attenuation, which is a function of dielectric permittivity, ε, magnetic permeability, μ, and electrical conductivity, σ, as well as the frequency of the signal itself, ω=2πf. The attenuation coefficient is expressed as: α = ω εμ 1 + (σ ωε )2 - 1 2 (4.7.3) In low-loss materials, where σ/ωε ≈ 0, the attenuation coefficient is reduced to α= σ 2 μ ε (4.7.4) The attenuation is proportional to the electrical conductivity, which leads to high attenuation in materials with high electrical conductivity. 99 INGELISE MØLLER 4.7.2 Field techniques Jol & Bristow (2003) give comprehensive advice and good practice in GPR field techniques. Reflection profiling In reflection profiling mode the antennae are kept at constant separation, while they are moved along a profile (Fig. 4.7.1a). The electromagnetic pulses are transmitted at fixed time or distance interval. The signal is recorded and displayed immediately on a computer screen as GPR profiles, in which the vertical axis is twoway travel time in nanoseconds (ns) and the horizontal axis is distance along the measured profile (Fig. 4.7.1b,c). The GPR data are either collected along a single profile or in a grid of profiles to obtain 2D or pseudo 3D information on structures in the ground. The GPR data can also be acquired along lines so densely spaced that the line spacing equals the stepsize along the line. This leads to a 3D data cube, where data also can be displayed as time or depth slices. Fig. 4.7.1: Principles of GPR in reflection profiling mode. a) In reflection profiling a set of transmitting antenna and receiving antenna with constant separation is moved along the profile. The path of some of the reflected waves is sketched for antenna position 56, 91 and 226 of the GPR profile in (c). b) The received signal of these antenna positions is displayed in wiggle mode. c) GPR profile acquired with 200 MHz system in a coastal environment. The horizontal axis displays the distance along the profile. The vertical axis to the left displays the two-way travel time and the axis to the right displays the converted depth. d) Photo of a GPR system equipped with 100 MHz antenna. The text on the photo explains the different part of the system. 100 4.7 Ground penetrating radar To ease the work in the field, the GPR system can be mounted on a cart or sledge which is towed by a person (Fig. 4.7.1d) or an all-terrain vehicle (ATV). The acquisition speed is comparable to walking speed for the most systems. The productivity per field day depends on the individual survey setup and the accessibility in the field. If there are topographic changes along the GPR profiles it is important that the topographic variation is surveyed precisely, so that the GPR profiles can be displayed with correct topography. As a result the reflections will be displayed with the true dip and geometry. Common mid point A common mid point dataset, CMP, is also called a velocity sounding, since the technique is commonly used for signal velocity establishment. In CMP mode the antennae separation is increased for each recording, while they are kept over a common mid point (Fig. 4.7.2a). A CMP plot contains the direct wave transmitted in the air above the ground, the direct wave transmitted in the ground and waves reflected from interfaces in the ground, where the dielectric properties change (Fig. 4.7.2b,c). Refracted waves are seldom present in CMP soundings. This is related to the fact that the electromagnetic wave velocity decreases with depth together with increasing water content with depth. Fig. 4.7.2: Principles of GPR in CMP mode. a) In CMP mode a set of a transmitting antenna (Tx) and a receiving antenna (Rx) are moved away from each other. The six first antenna positions are shown with the path of the reflected wave from the first reflector. b) Sketch of the path of the most common waves that is present in a CMP. c) Diagram of the received signals in a CMP. The horizontal axis displays the distance between the transmitting and the receiving antenna. The vertical axis displays the two-way travel time. d) Photo of a GPR system that is ready for a CMP sounding. 101 INGELISE MØLLER 4.7.3 Data processing ■ Migration will often enhance the display of the reflections significantly since diffraction hyperbolas are collapsed and dipping reflections are moved to the true geometrical position. Usually simple constant velocity migration procedures are used. Before the migration procedure can be applied, the electromagnetic wave velocities in the ground have to be determined. ■ Due to attenuation and spherical electromagnetic wave spreading of the signal the GPR data have to be time gained. Several procedures can be used. One of the most common procedures is automatic gain control, AGC. It equalises the amplitudes all the way down each trace if it is applied with at window of one pulse length. If the AGC is applied with a longer window length it tends to keep some information on the strength of the amplitudes of the reflections. ■ One of the last processing steps is the depth conversion and elevation correction. The electromagnetic wave velocities in the ground must be determined before this step. This is done the best in the field carrying out a CMP sounding (see next section). Postfieldwork velocity establishment is enabled by measuring the angle of the limbs of diffraction hyperbolae. Jol & Bristow (2003) briefly deal with the commonly used data processing procedures. Neal (2004) furthermore discusses the requirements of proper data processing. The next section points out a number of these essential processing steps. Reflection profiling mode Before the GPR data are ready for interpretation a few processing steps have to be applied. ■ The first step is simple data editing to correct mistakes in the field as well as reversing profile directions, merging files, etc. ■ The first regular processing step is a dewow, which removes a long waved part of the signal that is caused by electromagnetic induction. ■ A correction of the zero time may be the next step. The zero time may not have been detected precisely by the instrument in the field and should therefore be repicked to ensure correct depths in the profile. Furthermore, drift of the zero time along the profile can occur because of temperature difference between the instrument electronics and the air temperature or damaged cables. The drift causes misalignment of the reflections and the zero time has to be resampled for all traces along the profile. ■ If high frequency electromagnetic noise is present in the GPR profile it can be reduced by temporal low pass or band pass filtering. The data can either be displayed in colour mode or wiggle mode. In wiggle mode the amplitude variation of each trace is displayed as a curve, where the positive part of the amplitudes is filled out (e.g., Fig. 4.7.1c). In colour mode the amplitudes are colour coded (e.g., Fig. 4.7.3). CMP mode ■ 102 A spatial low pass filter also reduces noise as well as enhancing flat or only slightly dipping reflections, plus suppression of rapid changing features like diffraction hyperbolas and steeply dipping reflections. A spatial high pass filter work in the opposite way by enhancing diffraction hyperbolas and steeply dipping reflections and suppressing flat lying reflections. Spatial filters can change the appearance of the data dramatically and must be used with great caution. GPR data in CMP mode are processed in a similar way as data in reflection mode. Dewow, timezero correction and gain should be applied. Noisy data can be low pass filtered. The purpose of a CMP sounding is to estimate the electromagnetic wave velocity. The signal velocity in the subsurface just below surface can be determined from the direct ground wave. In the deeper part of the ground the velocity information is obtained from reflected waves. 4.7 Ground penetrating radar The root-mean-square velocities can be determined in a semblance analysis or simply by picking the arrival times of the reflections and fit 2 2 them to a straight line in a time -distance diagram. After estimation of the intercept time at zero distance the interval velocities can be determined using Dix’ analyses (Dix 1956). The water content in a coarse to mediumtextured soil can be estimated when the interval velocities are determined. Assuming that the soil is a low-loss material, the relative dielectric permittivity is determined using Equation 4.7.2. Thereby the volumetric water content can be estimated by Topp’s relationship that gives an empirical relationship between the relative dielectric permittivity and the water content (Topp et al. 1980). 4.7.4 Penetration depth The penetration depth is controlled by the GPR centre frequency, the electrical conductivity and the attenuation of the subsurface deposits. In low-loss (i.e., resistive) deposits a low centre frequency achieves a large penetration depth whereas a high centre frequency results in a lower penetration depth. The literature on GPR investigations in sediments reports on penetration depths of up to about 30-40 m for 40–50 MHz, of 10–25 m for 100 MHz, 5–15 m for 200 MHz and only a few metres for 500– 1000 MHz. The maximum penetration depths are obtained in dry clean sand and gravel (e.g., Smith & Jol 1995, Bakker 2004) or sandstone (e.g., Jol et al. 2003). How fast the GPR signal is attenuated depends primarily on the electrical conductivity of the ground (cf., Eqs. 4.7.3 and 4.7.4). In highresistive materials the signal is attenuated very slowly, whereas in conductive materials such as clay or deposits with saline pore water the attenuation is very fast and the penetration depth is decreased significantly. Using a 100 MHz GPR system on clayey deposits the penetration depth is limited to a few metres. Application on a deposit with saline pore water allows a penetration of a few centimetres only. 4.7.5 Resolution The vertical resolution depends primarily of the wavelength, λ, of the propagating electromagnetic wave, which is determined by the GPR frequency, f, and velocity, v, of the ground material as λ=v/f. Theoretically, the distance between two reflectors should at least be ¼ – ½ of the wavelength to be resolved (Sheriff 1995), though in practice the distance should be ½ – 1 wavelength (Møller & Vosgerau 2006). Using a ½ wavelength, the vertical resolution in dry sand with a velocity of 0.15 m/ns is about 1.5 m, 0.75 m and 0.19 m for a 50 MHz, 100 MHz and 400 MHz centre frequency, respectively. In saturated sand with a lower velocity of about 0.06 m/ns, the vertical resolution is 0.6 m, 0.3 m, and 0.075 m for a 50 MHz, 100 MHz and 400 MHz centre frequency, respectively. Figure 4.7.3 displays GPR profiles that are acquired with both 100 MHz and 200 MHz centre frequencies. This figure clearly illustrates that the vertical resolution is increased by decreased centre frequency. The lateral resolution depends on more than the wavelength of the propagating electromagnetic wave. The depth to the target as well as the antennae focusing plays a part. Neal (2004) discusses in detail the different aspects that have to be taken into account in the evaluation of the lateral resolution. 4.7.6 Restrictions, uncertainties, error sources and pitfalls The strong attenuation in conductive material such as clay or sediment with saline pore water restricts the GPR method to be used in environments with resistive sediments and rocks. When unshielded antennae are used abovesurface reflections from objects like trees, houses, power lines and poles above the ground surface should carefully be identified in the GPR profiles. At the best the survey should be carried out in safe distance of obstacles above the ground. 103 INGELISE MØLLER Ground truthing is important to verify the origin and nature of reflections. Usually exposures, borehole or cone-penetration test data are used. The application of GPR in Burval studies is related to the vulnerability mapping of the near surface layers (e.g., Møller & Jørgensen 2006). 4.7.8 References Bakker MAJ (2004): The internal structure of Pleistocene push moraines. A multidisciplinary approach with emphasis on groundpenetrating radar. – PhD thesis, Queen Mary, University of London, 177 pp. Fig. 4.7.3: GPR reflection profiles acquired in a coastal environment along the same line with (a) 100 MHz and (b) 200 MHz system. The 200 MHz GPR profile in (b) displays a better resolution of the reflections compared to the 100 MHz profile in (a), whereas the penetration depth is the largest in the 100 MHz GPR profile. The GPR profiles are migrated with a constant velocity of 0.06 m/ns and scaled with AGC with a window of four pulse lengths. The depth axis is shown with a vertical exaggeration of 2. 4.7.7 Interpretation and application of GPR Commonly used interpretation techniques are radar facies analyses (e.g, Beres & Haeni 1991, Huggenberger 1993, van Overmeeren 1998) and radar stratigraphic analyses, where radar sequence boundaries also are taken into account (e.g., Gawthorpe et al. 1993, Skelly et al. 2003). Radar facies are defined as mapable three dimensional units composed of reflections whose parameters differ from adjacent units. The sequence boundaries can be recognised by identifying the type of the termination of the reflections. Neal (2004) gives a comprehensive description of these interpretation techniques. 104 Beres M, Haeni FP (1991): Application of groundpenetrating-radar methods in hydrogeologic studies. – Ground Water 29: 375–386. Davis JL, Annan AP (1989): Ground penetrating radar for high-resolution mapping of soil and rock stratigraphy. – Geophysical Prospecting 37: 531–551. Dix CH (1956): – Seismic Prospecting of Oil, Harper, New York. Gawthorpe RL, Collier REL, Alexander J, Bridge JS, Leeder MR (1993): Ground penetrating radar: application to sandbody geometry and heterogeneity studies. – In North CP, Prosser DJ (eds.): Characterization of fluvial and aeolian reservoirs, Geological Society, London, Special Publication 73: 421–432. Huggenberger P (1993): Radar facies: recognition of facies patterns and heterogeneities within Pleistocene Rhine gravels, NE Switzerland. – In: Best J L, Bristow C S (eds.): Braided rivers Geological Society, London, Special Publication 75: 163–176. Jakobsen PR, Overgaard T (2002): Georadar facies and glaciotectonic structures in ice marginal deposits, northwest Zealand, Denmark. – Quaternary Science Reviews 21: 917–927. 4.7 Ground penetrating radar Jol HM, Bristow CS (2003): GPR in sediments: advice on data collection, basic processing and interpretation, a good practice guide. – In Bristow C S, Jol H M (eds.) Ground penetrating radar in sediments. Geological Society, London Special Publications 211: 9– 27. Reynolds JM (1997): An Introduction to Applied and Environmental Geophysics. - Wiley, Chichester. Jol HM, Bristow CS, Smith DG, Junck MB, Putnam P (2003): Stratigraphic imaging of the Navajo Sandstone using ground-penetrating radar. – The Leading Edge 22: 882–887. Skelly RL, Bristow CS, Ethridge FG (2003): Architecture of channel-belt deposits in an aggrading shallow sandbed braided river: the lower Niobrara River, northeast Nebraska. – Sedimentary Geology 158: 249–270. Møller I, Jakobsen PR (2002): Sandy till characterized by ground penetrating radar. – In Koppenjan S K, Lee H (eds.): Ninth International Conference on Ground Penetrating Radar. Proceedings of SPIE 4758: 308– 312. Smith DG, Jol HM (1995): Ground penetrating radar: antenna frequencies and maximum probable depths of penetration in Quaternary sediments. – Journal of Applied Geophysics 33: 93–100. Møller I, Jørgensen F (2006): Combined GPR and DC-resistivity imaging in hydrogeological mapping. – In proceedings of 11th International Conference on Ground Penetrating Radar, June 19–22, 2006, Columbus Ohio, USA, 5 pp. Møller I, Vosgerau H (2006): Testing ground penetrating radar for resolving facies architecture changes – a radar stratigraphic and sedimentological analysis along a 30 km profile on the Karup Outwash Plain, Denmark. – Near Surface Geophysics 4: 57–68. Sheriff, RE, Geldart, LP (1995): Exploration Seismology. Second Edition. - Cambridge University Press, New York. Topp GC, Davis JL, Annan AP (1980): Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. – Water Resources Research 16: 574–582. van Overmeeren RA (1998): Radar facies of unconsolidated sediments in The Netherlands: A radar stratigraphy interpretation method for hydrogeology. – Journal of Applied Geophysics 40: 1–18. Neal A (2004): Ground-penetrating radar and its use in sedimentology: principles, problems and progress. – Earth-Science Reviews 66: 261–330. 105 INGELISE MØLLER 106