The harmonic oscillator with damping
advertisement

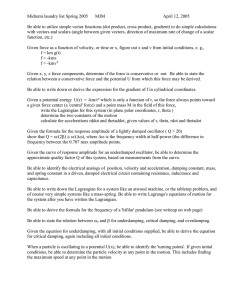
The harmonic oscillator with damping Definition: Summary: • body of mass m attached to spring with spring constant k is released from position x0 (measured from equilibrium position) with velocity v0; The equation of motion is d 2 x(t) dx(t) + 2β + ω20 x(t) = 0 2 dt , dt • resistance due to friction F res = − bv , b = nonnegative constant (possibly zero) x(t) where • β= b 2m and ω0 = k . m There are three distinct kinds of motion: Prerequisites: • β<ω0 : underdamped • fundamentals of Newtonian mechanics • β=ω0 : critically damped • t h e simple harmonic oscillator without resistance • β>ω0 : overdamped Go to derivation. Why study it? • a very simple dynamical system with an exact solution in closed form; • occurs frequently in everyday applications Go to Java™ applet In an earlier section, we studied the simple harmonic oscillator. Our example was an ideal spring with no damping force - no friction between the body and the track. Now let’s see what happens when we relax this restriction, and include a resistive force of the form Fres = –bv , where b is a positive constant and v is the velocity. (We considered such a force in another context in a previous section.) First, we try to picture what will happen. The resistive force will act to slow the motion down, and the amplitude of the oscillation will continually decrease. We might expect this decrease to be exponential, based on our earlier experience with this form of resistive force. We might also expect there to be several cases, depending on the amount of damping. Imagine a screen door which is released from its open position. If the damper is worn out and doesn’t provide enough damping, the door will slam shut. (If the door frame were not there, the door would oscillate back and forth a few times before stopping.) If the damper is really stiff, the door might take too long to shut, letting in all kinds of bugs. Somewhere in between these two cases will be a case where the damping is just the right amount to allow the door to close in the least amount of time without slamming. Here is a movie illustrating these three cases. Now let’s see how well our intuition holds up. Adding up the forces on the body and using Newton’s second law, we find ma(t) = − kx(t) − bv(t) , where the first term on the right-hand side is the restoring force due to the spring, and the second is the damping force due to friction. Rearranging, we find the differential equation d 2 x(t) b dx(t) + + ω20 x(t) = 0 , 2 m dt dt where ω0 = k / m is the natural freqency of the oscillator. It takes some inspiration to solve this equation. The standard trick is to try a solution of the form exp(αt) , because this function just reproduces itself when differentiated. The value of the constant α is determined by plugging this form back into the differential equation. We find (α2 + b α + ω 20 ) exp(α t) = 0 , m which can only be true for all t if the first factor is zero. Using the quadratic equation, we find äåå b 2 ë b ± åå 2 – ω20 ìììì α=– 2m ã 4m í 1/2 . We will make the following shorthand notation: b β≡ . 2m There will be three cases, depending on the size of β (the amount of damping). This is the case of small damping. The argument of the square root in α is negative, so α can have either of the two complex values α = –β ± i ω20 – β2 , where i2 =–1. (If you are weak on complex numbers, now would be the time to review.) As a shorthand, we will write ω1 = ω –β ã βx 0 + v 0 ìë sin ω1 t ìììì ω1 í . A second case occurs when 2) β=ω0 (“critically damped”) In this case, there is only one value of α: α = –ω0 . The solution is the limit of the underdamped case as ω1 goes to zero: 1) β<ω0 (“underdamped”) 2 0 åä x(t) = exp á − βt é åååå x 0 cos ω1 t + 2 . One of the basic results of complex analysis is that exp(iω 1 ) = cos ω1 + i sin ω1. Hence, our solutions are linear combinations of the functions exp á –βt é cos ω1 t and exp á –βt é sin ω1 t . The solution is easily found to be x(t) = exp á –βt é á x 0 + á βx 0 + v 0 é t é The linear dependence on t is characteristic of the case in which the two possible values of α are equal. 3) β>ω0 (“overdamped”) In this case, there are again two values of α, this time both real: α = –β ± β2 – ω20 . As a shorthand, we will write ω2 = β 2 – ω20 . size of β: The solution is äå x(t) = exp á − βt é åååå x 0 cosh ω 2 t + ã ëì βx 0 + v 0 sinh ω2 t ìììì ω2 í t where cosh and sinh are hyperbolic functions. The following plot shows typical curves for each of the three cases, all with the same x0 and with v0=0: β Here is a movie illustrating the three kinds of damping. Damping: critical over under under 2. Damped, driven oscillator t We see that the motion is a decaying oscillation in the underdamped case; the amplitude decays according to the envelope exp(–βt). We see that equilibrium is approached fastest for the critically damped case, hence its name. Here is a three-dimensional plot showing how the three cases go into one another depending on the You may recall our earlier treatment of the driven harmonic oscillator with no damping. We found that if the driving frequency is equal to the natural frequency of the system, then the amplitude becomes arbitrarily large as time goes on. This is unphysical, however. In practice,there is always some damping present. As the velocity becomes larger, this damping leads to greater and greater energy loss from the system, as we discussed earlier. As time goes on, the rate of energy lost due to damping balances the energy gained due to the external driving force, and a steady-state oscillation is achieved. Let’s see how this is reflected in the mathematics. Newton’s law now reads d 2 x(t) dx(t) m +b + k x(t) = F 0 cos (ω t) . 2 dt dt The solution is quite messy, but otherwise straightforward. It can be arranged into the sum of two pieces, one of which is proportional to exp(–βt) and the other of which is not. The former goes away as time becomes large, and is therefore called a transient. We will ignore this piece. The other piece, the steady-state solution, is the one we are interested in. It is easy to show by direct substitution into the differential equation that it is given by xs(t) = F0 m (ω2 − ω2R ) 2 + 4β2 ω21 cos(ωt − δ) where the resonant frequency is given by ωR = and the phase satisfies ω20 − 2β2 , tan δ = 2βω ω20 − ω2 . (The quantity ω21 = ω20 − β2 was defined earlier.) These are very important equations, and it is worth spending some time studying their properties (rather than deriving them). The amplitude of the steady-state solution is F0 A(ω) = . m (ω2 − ω2R )2 + 4β2 ω21 For the moment, let’s regard the damping β as fixed and the driving frequency ω as variable. The denominator of A(ω) is smallest when the driving frequency is equal to the resonant frequency. So A(ω) itself is a maximum for that value of ω. This is called resonance. (In the last section, we found resonance at ω = ω0 when no damping is present. This agrees with our present formula for the resonant frequency, when β=0.) Looking at our formula for the resonant frequency, we see that the resonance effect only occurs when ω0 > 2 β, and we restrict ourselves to this case. If we plot the amplitude of the steady-state solution versus ω, we get a curve with a peak at ω0 decreasing damping β Now let’s plot δ, the phase by which the steadystate solution lags behind the driving force. δ 01 0101 0101 0101 0101 0101 0101 0101 1001 A(ω) 0101010101010101010101 the resonant frequency. The next diagram shows several such curves, each for a different value of the damping constant β. π π/2 ω The height and width of the peak are controlled mainly by the value of β. The height of the peak is F0 , 2mω 1 β and its width is proportional to 2ω 1 β . The smaller the damping β, the higher and narrower the peak gets, and the closer the resonant frequency gets to the natural frequency ω0. ω0 ω (The curves have the same color as their partners in the previous plot.) We see that there is always a delay between the action of the driving force and the response of the system. When the system is being forced at its natural frequency ω0 , the phase lag is π/2. You might be familiar with this if you have ever played on a swingset. You can increase your amplitude the fastest by leaning back right at the bottom of your swing, one-quarter cycle behind your maximum amplitude. If the driving frequency is much smaller than the natural frequency, the driving force and the response are in phase. This makes sense, because the system can adjust itself to match the slow driving force. On the other hand, if the driving frequency is much higher than the natural frequency, the driving force and the response are out of phase (phase lag π).