AN1734
advertisement

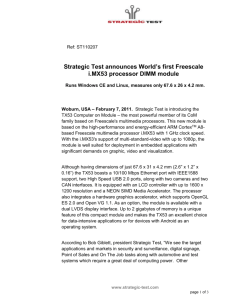
Freescale Semiconductor Order this document by AN1734/D Freescale Semiconductor, Inc... AN1734 Pulse Width Modulation Using the 16-Bit Timer By Brad Bierschenk and Allan Jones Applications Engineering Austin, Texas Introduction This application note presents a method of implementing pulse width modulation (PWM) in Motorola microcontrollers through the output compare function of the 16-bit free-running timer counter. Using this method, a PWM signal can be produced without dedicated on-chip PWM circuitry. PWM is a technique used to control devices or to provide a variable DC voltage. Common applications include motor, lighting, and climate controls. If the production of a PWM signal is not a vital part of an application, the added cost and complexity of dedicated PWM hardware in a microcontroller might not be justified. In this case it would be desirable to implement PWM output through software control of a common MCU module. By using the 16-bit timer counter and its output compare function, a PWM of desired duty cycle and frequency can be quickly and easily implemented. This method uses modules common in most Motorola microcontrollers and requires only a small amount of processing overhead. © Freescale Semiconductor, Inc., 2004. All rights reserved. For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note PWM A PWM signal is a signal with a fixed frequency and variable on and off times. In other words, the period of the signal remains constant, but the amount of time that the signal remains high and low can vary within a period. The duty cycle is the ratio of on time (tOn) to the total period (t = tOn + tOff). Freescale Semiconductor, Inc... Figure 1 illustrates a square wave. When viewed as a PWM signal, its duty cycle is 50%. In other words, it is on half of the time. tOn tOff t Figure 1. PWM Signal with 50% Duty Cycle Figure 2 illustrates another PWM signal. Its duty cycle is 10%. By varying the duty cycle, the average DC voltage output can be controlled. For example, a PWM signal that has a 10-V amplitude and a 50% duty cycle can provide an average 5-V output. When increasing or decreasing a PWM duty cycle, the average output increases or decreases respectively. AN1734 2 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Output Compare Method tOff tOn Freescale Semiconductor, Inc... t Figure 2. PWM Signal with 10% Duty Cycle This controllable output is useful in many applications. For example, this output could be used to control the speed of a motor. By increasing the duty cycle, the average voltage across a motor can be controlled. The output could also be fed through an RC network, forming a simple digitalto-analog converter. Output Compare Method One effective method of producing a PWM signal in a Motorola microcontroller involves the use of the 16-bit free-running timer. This method does not require dedicated PWM circuitry and can be implemented across a wide variety of Motorola MCUs. The 16-bit timer and its output compare function can be used to produce a specific output level at a particular time. When the output of the timer compare (TCMP) pin is alternated between low and high logic levels, the result is a periodic waveform. Values in the output compare register are used to cause a delay between output events. Specifically, tOn and tOff of a desired duty cycle can be calculated and programmed into the output compare function. The basic steps in this procedure are: 1. Compute a timer delay value, add it to the current counter value, and place the result in the output compare register. AN1734 3 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note 2. Set or clear the output level bit (OLVL) in the timer control register (TCR). This will determine the TCMP pin's output level for the next valid compare. 3. Set the output compare interrupt enable bit (OCIE) in the TCR to enable output compare interrupts. 4. Clear the interrupt mask. 5. On timer interrupt: Freescale Semiconductor, Inc... a. Complement the OLVL bit for next compare. b. Compute and store new value for output compare register. The first step in implementing this procedure involves computing the values needed in the output compare register. Given the desired frequency (f) and duty cycle (DC) of the PWM signal to be generated, delay values needed to create the waveform can be determined. PWM Definitions Period: t = 1/f = tOn + tOff Duty cycle: DC = tOn/(tOn+tOff) = tOn/t Given f and DC of a PWM signal, find: Period: t = 1/f On time: tOn = DC * t Off time: tOff = t – tOn For example, a PWM is to be generated with a frequency of 2 kHz and a duty cycle of 50%. In this case, the period t is 500 µs, and tOn and tOff are both 250 µs. Next, the frequency of the timer subsystem should be calculated. For the HC05 Family of MCUs to find the MCU internal operating frequency, fop, divide the oscillator frequency, fosc, by 2. The timer prescaler divides this frequency further by 4. Therefore, the timer subsystem frequency, ftim, is fosc/8. For example, a 4-MHz oscillator would yield a timer frequency of 500kHz. The timer period would then be 2 µs. In other words, one timer AN1734 4 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Output Compare Method increment takes 2 µs to complete. We will define this time as ttim, the period of the timer system. Once the timer period, ttim, is found, compute the number of timer cycles required to cause a specific delay. This delay can be used to time an output. In the case of generating a PWM signal, the high and low levels of the output need to be timed. Specifically, the on and off delay values should be calculated. These delays reflect the number of timer cycles necessary to produce a pulse of a specific duration. Freescale Semiconductor, Inc... The delay values are proportional to the on and off times of the desired PWM signal, and are defined as: On delay: DOn = tOn/ttim Off delay: DOff = tOff/ttim Using the previous example of a 4-MHz oscillator, 2-kHz PWM, and 50% duty cycle, DOn and DOff would each require a decimal value of 125. The delay values DOn and DOff can be added to the timer counter, and the result will be stored in the output compare register. On a valid compare (when the contents of the counter match the output compare register), an output compare interrupt can be generated. This interrupt can then be used to prepare the MCU for the next pulse segment delay and its associated output level. In MCUs equipped with output compare (TCMP) pins, the logic level to be output on a valid compare can be preset. In this way, an output compare timer interrupt will set the output level of the TCMP pin immediately. A new value for the output compare register to time the current output level can then be loaded, and the next triggered output level set. In this manner, a highly accurate PWM output can be achieved, as the output level is set automatically on a valid compare. If a microcontroller does not have a TCMP pin, the same procedure for setting up output compares can be followed. The timer interrupt service routine can be programmed to manually set the PWM output level at the pin of an I/O port. In this case, the software would set the current pulse segment's output level and delay, rather than the next segment's output level and the current segment's delay. AN1734 5 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note NOTE: When using this method, one must consider the latency of entering the interrupt routine when calculating the necessary delays. The time between a valid compare and the manual setting of the output level in this case is not always negligible. Freescale Semiconductor, Inc... By controlling DOn and DOff, different combinations of PWM duty cycles and frequencies can be achieved. Some applications, such as motor control or lighting, involve control of the duty cycle of a PWM output. Other applications, such as tone generation, require a fixed duty cycle and different frequencies. This technique of generating a PWM signal is limited by the duration of the timer interrupt routine. Because the timer interrupt computes and loads the compare values needed to produce the desired output, the minimum delay that can be tolerated is the worst-case duration of the software. A pulse cannot be produced if its segment delay time is shorter than the time needed to process the output compare interrupt. If other tasks are to be performed between timer interrupts, the worst case time requirements of the other tasks should be considered as well. The time to process other software functions may need to be included in the minimum delay. AN1734 6 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Output Compare Method Freescale Semiconductor, Inc... Timing limits fosc (MHz) fop (MHz) top ( µs) ftim (kHz) ttim ( µs) Minimum delay( µs) = (interrupt cycles)*top Minimum timer change = (interrupt cycles)/4 8 4 0.25 1000 1 13 13 4 2 0.5 500 2 26 13 2 1 1 250 4 52 13 1 0.5 2 125 8 104 13 Duty cycle limits Desired PWM frequency 1 kHz 2 kHz 5 kHz fosc (MHz) Min DC Max DC Min DC Max DC Min DC Max DC 8 1.3% 98.7% 2.6% 97.4% 6.5% 93.5% 4 2.6% 97.4% 5.2% 94.8% 13.0% 87.0% 2 5.2% 94.8% 10.4% 89.6% 26.0% 74.0% 1 10.4% 89.6% 20.8% 79.2% 52.0% 48.0% Figure 3. Example Limits for MC68HC705C8A (1 to 4 MHz) and MC68HSC705C8A (8 MHz) Figure 3 illustrates the limits encountered when using this method of PWM generation. The bus frequency and the interrupt routine latency determine the minimum delay that can be tolerated. For example, in our sample application the interrupt routine demands 52 bus cycles in the worst case. This makes the minimum tolerable delay time 52 * top. The minimum delay time applies to both on and off times, therefore affecting the minimum and maximum achievable duty cycles. Figure 3 shows that higher bus frequencies and lower PWM frequencies provide greater duty cycle control. The minimum duty cycle is the minimum time delay divided by the desired PWM period. The maximum duty cycle results from the off delay being equal to the minimum tolerable delay. AN1734 7 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Sample Application — Motor Controller In this example application, we want to produce a PWM signal of a fixed frequency. We want to control the duty cycle with as wide a range as possible. The PWM output will drive a fan motor. Figure 4 shows the example application circuit using the Motorola MC68HC705P9. Freescale Semiconductor, Inc... We have attached a potentiometer to the analog-to-digital (A/D) subsystem of the microcontroller. By monitoring the A/D data register, a number between $00 and $FF is obtained. This number is used as the on delay, DOn. The main software loop simply polls the A/D subsystem, waiting for new data. To further expand this application, the potentiometer could be replaced with a temperature sensor, creating a temperature-controlled fan. When a new A/D value is ready, the software determines the difference between the new DOn (the ADDR value) and the current DOn. If the new A/D value does differ from the DOn, it can be determined whether the duty cycle should increase or decrease. AN1734 8 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Sample Application — Motor Controller 24 V VDD FAN MOTOR WINDING 1N4002 VDD VRH MOTOROLA HC05 MICROCONTROLLER Freescale Semiconductor, Inc... 470 Ω IRF730 TCMP AN0 10 kΩ 0.1 µF FAN: PANAFLO DC BRUSHLESS, FBP — 08B24L 24 Vdc, 0.09A Figure 4. Fan Control Circuit When the duty cycle is altered through the potentiometer, the new DOn and DOff is calculated. However, before these new values are recorded, they must be checked against the upper and lower delay limits. If they exceed these limits, no change is made in the delays. Because an 8-bit delay value is used, the upper limit on delays is $FF. There is also a lower limit on delays. The time it takes to process the timer output compare interrupt routine determines this limit. Output compare interrupts should not happen faster than they can be serviced. In this example, the worst case interrupt service time is 52 cycles. With an internal operating frequency of 2 MHz, the time required is 26 µs. Because the 16-bit timer runs at 500 kHz, its period is 2 µs. Therefore, the minimum delay this interrupt routine can tolerate is 13 "ticks" of the free-running timer (13 * 2 µs = 26 µs). Keeping track of this lower limit ensures an accurate and clean output waveform. AN1734 9 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Conclusion There are many other methods of producing PWM outputs using Motorola microcontrollers. In choosing one method over the others, trade-offs must be considered regarding convenience, cost, and precision. Freescale Semiconductor, Inc... The method discussed in this application note provides a good balance between cost, convenience, and duty cycle control.This method can be implemented across a wide variety of Motorola microcontrollers. PWM generation can also be implemented entirely in software. This method can be implemented in any microcontroller, but requires a great deal of software overhead. The simultaneous use of the timer overflow interrupt and real-time interrupt as timing references for a PWM signal can also be implemented. This method can produce only a few different duty cycles for any given frequency and cannot be implemented in all Motorola microcontrollers. For applications which require precise control of multiple PWM signals, Motorola provides parts with dedicated PWM circuitry. Examples include the MC68HC708MP16, MC68HC705MC4, and MC68HC05D9/D24/D32 microcontrollers. For more information on such products, consult the 68HC05/68HC08 selector guide, Motorola document order number SG165/D. AN1734 10 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Conclusion INITIALIZE ADC GET INITIAL VALUE SET UP INITIAL DUTY CYCLE LOOP Freescale Semiconductor, Inc... NO NEW ADC DATA READY? YES YES GET NEW VALUE OF ON DELAY FROM AD DATA IS NEW VALUE THE SAME AS OLD VALUE OF ON DELAY? CALL DUTY UP CALL DUTY DOWN NO SUBTRACT OLD ON DELAY FROM NEW VALUE YES IS RESULT POSITIVE? (NEW > OLD) NO Figure 5. Main Program Flow AN1734 11 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note DUTY DOWN DELTA = |DELTA| Freescale Semiconductor, Inc... OFF DELAY = OFF DELAY + DELTA YES EXCEEDED $FF? NO LOAD ADC DATA DLIMIT1 ADC DATA < DELAY MIN? YES OFF DELAY = DELAY MAX ON DELAY = DELAY MIN NO STORE NEW ON DELAY, STORE NEW OFF DELAY RTS Figure 6. Duty Down Subroutine AN1734 12 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Conclusion DUTY UP YES DELTA > OFF DELAY? Freescale Semiconductor, Inc... NO OFF DELAY = OFF DELAY – DELTA DLIMIT2 ON DELAY = DELAY MAX OFF DELAY = DELAY MIN YES NEW OFF DELAY < DELAY MIN NO RECORD NEW OFF DELAY ON DELAY = ADC DATA RTS Figure 7. Duty Up Subroutine AN1734 13 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note TIMERINT TIMER INTERRUPT Freescale Semiconductor, Inc... NO IS CURRENT OUTPUT LEVEL (TCMP) HIGH? YES GO HIGH GO LOW SET OLVL BIT FOR NEXT OUTPUT LEVEL CLEAR OLVL BIT FOR NEXT OUTPUT LEVEL ADD OFF DELAY TO OUTPUT COMPARE LOW BYTE (OCL) ADD ONDELAY TO OUTPUT COMPARE LOW BYTE (OCL) COMPENSATE FOR CARRY IF NEEDED COMPENSATE FOR CARRY IF NEEDED CLEAR OCF WRITE NEW OUTPUT OUTPUT COMPARE LOW BYTE (OCL) RTI Figure 8. Timer Interrupt Routine AN1734 14 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Code Listing Freescale Semiconductor, Inc... Code Listing ************************************************************************************ * DCVAR.ASM * * This program illustrates the use of the 16-bit free-running timer to * * generate a Pulse Width Modulated (PWM) signal using a Motorola HC05 * * MCU. * * * * This example was written for the M68HC05P9 microcontroller. As shown * * in the accompanying application note, this program is used in * * conjunction with a potentiometer connected to an ADC channel to control * * the duty cycle of a fixed-frequency PWM signal, which appears on the * * TCMP pin. * * * * The loop portion of the program reads in the value of the A/D data * * register. When the contents of the data register do not match the * * OnDelay of the program, an adjustment is made to OnDelay and OffDelay * * and the duty cycle of the PWM signal is changed. * * * * OnDelay is determined and controlled by the value in the A/D data * * register (ADDR). * * * * The PWM signal is achieved by keeping track of two variables, OnDelay * * and OffDelay. These two values determine the amount of time the output * * signal is kept high or low. The timer routine reads the free-running * * timer, adds the delay amount to it, and stores the result in the output * * compare register. When the free-running timer matches the value in the * * output compare register, the TCMP pin is toggled, and new delay values * * are computed. * * * * The maximum delay value is $FF, due to the use of an 8-bit value. * * The minimum delay value is $0D, determined by the time it takes to * * execute the timer interrupt routine. In this case it is around 52 bus * * cycles, which at an internal operating frequency of 2 MHz is ~26 µs. * * Because the timer frequency is the operating frequency divided by 4, * * the minimum delay value for the timer becomes the interrupt latency * * divided by 4. * *********************************************************************************** * Equate statements for assembler *********************************************************************************** * Registers TCR EQU $12 ;Timer control register TSR EQU $13 ;Timer status register OCH EQU $16 ;Output compare registers OCL EQU $17 ;(High/Low Bytes) ACRH EQU $1A ;Alternate counter registers ACRL EQU $1B ;(High/Low Bytes) ADDR EQU $1D ;A/D data register ADSCR EQU $1E ;A/D status and control register AN1734 15 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note * Bit positions OCIE EQU OLVL EQU CCF EQU $06 $00 $07 Freescale Semiconductor, Inc... * Vector and memory assignments TIMERVEC EQU $1FF8 RESETVEC EQU $1FFE RAMSPACE EQU $80 ROMSPACE EQU $0100 ;OCIE bit position in TCR ;OLVL bit position in TCR ;CCF bit position in ADSCR ;Timer interrupt vector ;Reset vector ;User RAM ;User ROM * Initial OnDelay and OffDelay * 500 kHz timer frequency => 2 µs timer period HALFPERIOD EQU $7D ;2 kHz frequency @ 50% duty cycle * PWM definitions * Minimum achievable delay is determined by the timer interrupt latency * Maximum achievable delay is determined from period - (minimum delay) DELAYMIN EQU $0D ;Minimum achievable delay ;determined by interrupt latency DELAYMAX EQU $ED ;Maximum delay ;(HALFPERIOD*2) - (DELAYMIN) *********************************************************************************** * RAM Variables *********************************************************************************** ORG RAMSPACE ;Start of user RAM OnDelay RMB 1 ;PWM variables OffDelay RMB 1 ADCData RMB 1 Delta RMB 1 TempA RMB 1 ;Temporary storage variable *********************************************************************************** * Main Program * Setup timer interrupts and analog-to-digital converter *********************************************************************************** ORG ROMSPACE ;Start of user ROM Setup LDA #$20 STA ADSCR ;Turn on A/D and select channel AN0 LDA #HALFPERIOD STA OnDelay ;Record delay variables STA OffDelay Init BRCLR CCF,ADSCR,Init LDA ADDR ;Get initial potentiometer reading STA ADCData ;Record value BSR UpdateDC ;Update the PWM duty cycle BSET OLVL,TCR ;Set to output high on first compare LDX ACRH ;Get the current timer value, LDA ACRL ;store in X and A AN1734 16 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Freescale Semiconductor, Inc... Application Note Code Listing ADD OffDelay ;Compute the next compare time BCC Setup2 ;Compensate for 8-bit carry, INCX ;increment high byte if needed Setup2 STX OCH ;Store OC high byte and inhibit OC LDA TSR ;Clear OCF if set STA OCL ;Prepare for next compare BSET OCIE,TCR ;Enable OC interrupt CLI ;Clear interrupt mask *********************************************************************************** * Loop and wait for new A/D data *********************************************************************************** Loop BRCLR CCF,ADSCR,Loop LDA ADDR ;Get new potentiometer reading STA ADCData ;Record new value BSR UpdateDC ;Update the PWM duty cycle BRA Loop ;Repeat UpdateDC LDA ADCData ;Load new potentiometer reading SUB OnDelay ;Difference of old and new OnDelay BHI DutyUp ;If positive difference, increase DC BLO DutyDown ;If negative difference, decrease DC RTS ;Return if no difference *********************************************************************************** * Decrease the duty cycle; decrease OnDelay, increase OffDelay *********************************************************************************** DutyDown NEGA ;If negative difference, decrease DC ADD OffDelay ;OffDelay += |difference| BCS Dlimit1 ;Exceeded $FF; don't change STA TempA ;Temporary storage LDA ADCData ;Get ADC data CMP #DELAYMIN ;Compare with minimum limit BLO Dlimit1 ;If lower than minimum, don't change STA OnDelay ;Record new OnDelay LDA TempA STA OffDelay ;Record new OffDelay BRA Ddone1 Dlimit1 LDA #DELAYMAX ;Maximum, compute limits STA OffDelay LDA #DELAYMIN STA OnDelay Ddone1 RTS *********************************************************************************** * Increase the duty cycle; increase OnDelay, decrease OffDelay *********************************************************************************** DutyUp STA Delta ;Record difference LDA OffDelay CMP Delta ;Compare OffDelay and difference BLO Dlimit2 ;If OffDelay < difference, at minimum SUB Delta ;If OffDelay >= difference, go ahead CMP #DELAYMIN ;See if minimum delay was violated BLO Dlimit2 ;If so, record the limit AN1734 17 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Application Note Dlimit2 Freescale Semiconductor, Inc... Ddone2 STA LDA STA BRA LDA STA LDA STA RTS OffDelay ADCData OnDelay Ddone2 #DELAYMAX OnDelay #DELAYMIN OffDelay ;Record new OffDelay ;Record new OnDelay ;Maximum, compute limits ************************************************************************************ * Timer Interrupt Routine * This routine services the output compare interrupt. * The latency of this routine determines the minimum delay possible. ************************************************************************************ * NOTE: * If other timer interrupts are active, need to arbitrate them * before servicing the output compare interrupt ************************************************************************************ TimerInt BRSET OLVL,TCR,GoLow ;Determine current output level GoHigh BSET OLVL,TCR ;Setup OLVL for high next time LDA OCL ;Setup next output compare time ADD OffDelay ;Add off delay offset BCC NoCarry ;Compensate for 8-bit carry BRA Carry GoLow BCLR OLVL,TCR ;Setup OLVL for low next time LDA OCL ;Setup next output compare time ADD OnDelay ;Add on delay offset BCC NoCarry ;Compensate for 8-bit carry Carry INC OCH NoCarry LDX TSR ;Clear OCF bit STA OCL ;Ready for next compare RTI ;Return from interrupt ************************************************************************************ * Vector Definitions ************************************************************************************ ORG TIMERVEC ;Timer interrupt vector FDB TimerInt ORG RESETVEC ;Reset vector FDB Setup AN1734 18 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. Freescale Semiconductor, Inc... Application Note Code Listing AN1734 19 For More Information On This Product, Go to: www.freescale.com Freescale Semiconductor, Inc. N O N - D I S C L O S U R E Freescale Semiconductor, Inc... A G R E E M E N T R E Q U I R E D Application Note How to Reach Us: Home Page: www.freescale.com E-mail: support@freescale.com USA/Europe or Locations Not Listed: Freescale Semiconductor Technical Information Center, CH370 1300 N. Alma School Road Chandler, Arizona 85224 +1-800-521-6274 or +1-480-768-2130 support@freescale.com Europe, Middle East, and Africa: Freescale Halbleiter Deutschland GmbH Technical Information Center Schatzbogen 7 81829 Muenchen, Germany +44 1296 380 456 (English) +46 8 52200080 (English) +49 89 92103 559 (German) +33 1 69 35 48 48 (French) support@freescale.com Japan: Freescale Semiconductor Japan Ltd. Headquarters ARCO Tower 15F 1-8-1, Shimo-Meguro, Meguro-ku, Tokyo 153-0064 Japan 0120 191014 or +81 3 5437 9125 support.japan@freescale.com Asia/Pacific: Freescale Semiconductor Hong Kong Ltd. Technical Information Center 2 Dai King Street Tai Po Industrial Estate Tai Po, N.T., Hong Kong +800 2666 8080 support.asia@freescale.com For Literature Requests Only: Freescale Semiconductor Literature Distribution Center P.O. Box 5405 Denver, Colorado 80217 1-800-441-2447 or 303-675-2140 Fax: 303-675-2150 LDCForFreescaleSemiconductor@hibbertgroup.com Information in this document is provided solely to enable system and software implementers to use Freescale Semiconductor products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits or integrated circuits based on the information in this document. Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does Freescale Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters which may be provided in Freescale Semiconductor data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. Freescale Semiconductor does not convey any license under its patent rights nor the rights of others. Freescale Semiconductor products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the Freescale Semiconductor product could create a situation where personal injury or death may occur. Should Buyer purchase or use Freescale Semiconductor products for any such unintended or unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that Freescale Semiconductor was negligent regarding the design or manufacture of the part.