Solution to HW7
advertisement

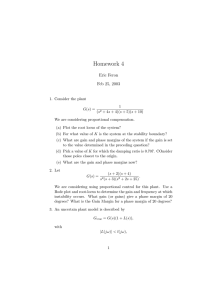
ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 1 Solution to HW7 AP9.5 We are given a system with open loop transfer function G(s) = K(s + 0.2) s2 (s + 2)(s + 5) (1) and unity negative feedback. We are asked to determine the value of K that maximizes the phase margin, then, with that gain, to determine the overshoot resulting from a step input. Solution: The closed loop transfer function is T (s) = K(s + 0.2) . s2 (s2 + 7s + 10) + Ks + 0.2K (2) I don’t see a straightforward calculation we can do to express the phase margin in terms of the gain K. Accordingly, we will have to write a Matlab script that searches for this maximum. First, we’ll have to determine what values of K we should search over. The Routh array, shown in Table 1, leads us to conclude that we should vary K from 0 to 60.2. (Obviously we don’t want K to be exactly zero. We’ll start with, say, K = 0.1.) Table 1: Routh array for AP9.5 s4 : s3 : s2 : s1 : s0 : 1 7 −1 (K − 70) 7 7 K−70 (1.4K + K(K − 70)/7) −1 7 (−1.4K) 10 K −1 (−1.4K) 7 0.2K Next, using the Matlab script below, we obtain optimal gain Km = 4.9, with gain margin Gm = 12.2809 at Wcg = 2.9320, phase margin Pm = 48.4573, at Wcp = 0.5078, and step response overshoot of 29%. The Bode plot and step response for the closed loop system with K = 3.7 are shown in Figures 1 and 2. % % AP9_5.m solves part of problem AP9_5 from Dorf and Bishop 10th ed. % % 17 April 05 --sk % for K = [0.1:0.1:60.1]; oltf = tf(K*[1 0.2],[1 7 10 0 0]); [Gm,Pm,Wcg,Wcp] = margin(oltf); pmar(round(K*10)) = Pm; end; ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 2 Figure 1: Closed Loop Bode Diagram for AP9.5 with K = 3.7 Closed Loop Bode Plot for AP9.5 with K = 4.9 50 Magnitude (dB) 0 −50 −100 −150 0 Phase (deg) −90 −180 −270 −2 10 −1 10 0 10 Frequency (rad/sec) 1 10 [pmm,loc]=max(pmar); Km = loc/10 oltf = tf(Km*[1 0.2],[1 7 10 0 0]); cltf = feedback(oltf,1); figure(5) bode(cltf) grid title([’Closed Loop Bode Plot for AP9.5 with K = ’,num2str(Km)]) print -deps ap9_5a [Gm,Pm,Wcg,Wcp] = margin(oltf) [y,t] = step(cltf); figure(6) plot(t,y) grid % open loop not closed loop xfer fn! 2 10 ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 3 Figure 2: Step Response for AP9.5 with K = 3.7 Step Response for AP9.5 with K = 4.9 1.4 1.2 1 y(t) 0.8 0.6 0.4 0.2 0 0 2 4 6 8 10 12 14 16 18 Time (s) xlabel(’Time (s)’) ylabel(’y(t)’) title([’Step Response for AP9.5 with K = ’,num2str(Km)]) print -deps ap9_5aa overshoot = max(y) AP9.7 We are given a unity negative feedback system with compensator transfer function K(s + 4) and plant transfer function 1/s2 cascaded in the forward path. A disturbance input occurs between the compensator and the plant. We are asked to find a K that results in phase margin of 45 degrees, then find the bandwidth and peak amplitude Mp (not Mpω ) of the response to a unit step disturbance. Solution: The closed loop transfer function is T (s) = K(s + 4) Y (s) = 2 R(s) s + Ks + 4K (3) ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 4 √ so the natural frequency of the closed-loop system is ωn = 2 K and the damping coefficient √ is ζ = K/4. We’ll use an iterative search similar to that used in AP9.5, except that rather than maximizing the phase margin, we want to minimize the difference between the phase margin and the design specified phase margin of 45 degrees. This time it is √ not so easy to determine the range of K to use. The poles of the system are −K/2 ± K 2 − 16K/2, so, assuming that K is positive, the only way for a pole to have a positive real part is for the square root to be real and greater than K. But, when real, the square root of K 2 − 16K is always less than K. In other words, the gain does not affect the stability. That doesn’t help us decide what range of K to check. Let’s start with the range 0 < K < 10 and, if necessary, we’ll increase the upper bound. Using the Matlab script below, we obtain optimal gain Km = 2.8, with infinite gain margin and phase margin Pm = 44.8097, at Wcp = 3.9735. Using the interactive feature of the Matlab Bode plot we determine that the system bandwidth is approximately 5.8 rad/s. The maximum value of the closed loop step disturbance response is 2.8284. The Bode plot and step response for the closed loop system with K = 2.8 are shown in Figures 3 and 4. % % AP9_7.m solves part of problem AP9_7 from Dorf and Bishop 10th ed. % % 17 April 05 --sk % % iterate for closed loop gain margin for K = [0.1:0.1:10]; oltf = tf(K*[1 4],[1 0 0]); [Gm,Pm,Wcg,Wcp] = margin(oltf); pmar(round(K*10)) = Pm; end; [foo,loc]=min(abs(pmar-45*ones(size(pmar)))); Km = loc/10 oltf = tf(Km*[1 4],[1 0 0]); cltf = feedback(oltf,1); figure(7) bode(cltf) grid title([’Closed Loop Bode Plot for AP9.7 with K = ’,num2str(Km)]) print -deps ap9_7a [Gm,Pm,Wcg,Wcp] = margin(oltf) dcltf = tf(1,[1 Km 4*Km]) [y,t] = step(cltf); figure(8) ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 5 Figure 3: Closed Loop Bode Diagram for AP9.7 with K = 2.8 Closed Loop Bode Plot for AP9.7 with K = 2.8 10 5 0 Magnitude (dB) −5 −10 −15 −20 −25 −30 −35 −40 0 Phase (deg) −45 −90 −135 −1 10 0 1 10 10 2 10 Frequency (rad/sec) plot(t,y) grid xlabel(’Time (s)’) ylabel(’y(t)’) title([’Closed Loop Response to unit step disturbance for AP9.7 ’,... ’with K = ’,num2str(Km)]) print -deps ap9_7aa max(y) AP9.9 We are given a system with unity negative feedback and forward path transfer function Gc (s)G(s) = KP s + KI s2 (s2 + 7s + 10) (4) where KI /KP = 0.2 and we are asked to find the value of KP that maximizes the phase margin. ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 6 Figure 4: Closed Loop Step Disturbance Response for AP9.7 with K = 2.8 Closed Loop Response to unit step disturbance for AP9.7 with K = 2.8 1.4 1.2 1 y(t) 0.8 0.6 0.4 0.2 0 0 0.5 1 1.5 2 Time (s) 2.5 3 3.5 4 Solution: With KI /KP = 0.2, the closed loop transfer function is T (s) = s4 + 7s3 KP (s + 0.2) . + 10s2 + KP (s + 0.2) (5) Conveniently, this is the same transfer function that we had in problem AP9.5. The answer will thus be the same, i.e. Kp = 4.9 will yield the maximum phase margin, etc. (Ok, so I wasn’t paying enough attention when I assigned this one. I trust there will be no complaints. :-) DP9.3 We are given a system having unity negative feedback and transfer function G(s) = Ke−10s 40s + 1 (6) in the forward path. We are asked to choose a value for K to keep the output within a narrow range while maintaining good dynamic response. Solution: First, let’s generate a Bode diagram for the open loop system. The delay will add φ(ω) = −ωT where T = 10 to the phase shift while not affecting the magnitude. We ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 7 use the commands shown in the Matlab script below to generate the Bode diagram shown in Figure 5. This doesn’t really seem very useful. Next, we’ll use a Pade approximation to Figure 5: Open Loop Bode Diagram for DP9.3 with K = 1 Open Loop Bode Plot for DP9.3 with K=1 0 Magnitude (dB) −5 −10 −15 −20 −25 −30 −35 −3 10 −2 −1 10 10 0 10 0 Phase (deg) −20 −40 −60 −80 −100 −3 10 −2 −1 10 10 0 10 Frequency (rad/s) express the time delay as a transfer function so that we can analyze the time and frequency response of the closed loop system. As shown in the Matlab script, the pade command yields the following second order transfer function approximation to time the delay: Gd (s) = s2 − 0.6s + 0.12 . s2 + 0.6s + 0.12 (7) To get some idea what range of values of the gain K are allowable for a stable system, we can do a root locus of the system including the approximate time delay. The root locus plot is shown in Figure 6. We find that the complex valued loci cross the imaginary axis when K ≈ 7. Were this a real application, we’d ask the physicians or biomedical engineers on our design team to be a bit more specific about what they mean by “maintains narrow deviation for blood pressure while achieving a good dynamic response”. That not being an option, I’m going to use the working hypothesis that overshoot of more than 5 percent in a step response would be bad. I used a loop to generate step responses for different gains ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 8 Figure 6: Root Locus for DP9.3 with 2nd Order Pade Approximation to Time Delay Root Locus for DP9.3 0.25 0.2 System: oltf Gain: 7.01 Pole: 0.000208 + 0.173i Damping: −0.0012 Overshoot (%): 100 Frequency (rad/sec): 0.173 0.15 0.1 Imaginary Axis 0.05 0 −0.05 −0.1 −0.15 −0.2 −0.25 −0.7 −0.6 −0.5 −0.4 −0.3 −0.2 Real Axis −0.1 0 0.1 0.2 0.3 less than 5. (5 = 7 minus a large margin for error.) I found that the rise and settling time decreases with increasing K (as we would expect). I found that a value of K = 1.8 resulted in 4.23% overshoot, meeting my interpretation of the design requirements. The final value of the step response was 0.6429 so I would need to add a gain block after the feedback path to boost the output. To be really thorough, I’d have to check to see whether this gain were frequency dependent and, if necessary, use a filter rather than a simple amplifier. Here’s my Matlab script. % % DP9_3.m solves part of problem DP9_3 from Dorf and Bishop 10th ed. % % 17 April 05 --sk % figure(3) K = 1; oltf = tf([K],[40 1]) [mag,phase,w] = bode(oltf); ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 9 nphase = squeeze(phase) - w.*10; subplot(2,1,1) magdB = 20*log10(squeeze(mag)); semilogx(w,magdB) grid ylabel(’Magnitude (dB)’) title(’Open Loop Bode Plot for DP9.3 with K=1’) subplot(2,1,2) semilogx(w,nphase,’-.’,w,squeeze(phase),’-’) grid ylabel(’Phase (deg)’) xlabel(’Frequency (rad/s)’) print -deps dp9_3a [dnum,dden]=pade(10,2) oltf = series(tf(dnum,dden),tf([K],[40 1])) figure(4) rlocus(oltf) title(’Root Locus for DP9.3’) print -deps dp9_3rl t=[0:.01:1000]’; np=max(size(t)) for K = [0.1:.1:5] oltf = series(tf(dnum,dden),tf([K],[40 1])); cltf = feedback(oltf,1); [y,t]= step(cltf,t); po(round(K*10)) = (max(y)-y(np))/y(np); end K=1.8 oltf = series(tf(dnum,dden),tf([K],[40 1])); cltf = feedback(oltf,1); [y,t]= step(cltf,t); MP9.2 We are asked to use the Matlab nyquist command to analyze the following three systems: Ga (s) = Gb (s) = Gc (s) = Solution: 1 s+1 20 s2 + 8s + 14 10 (s + 1)3 (8) (9) (10) ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 10 The Nyquist plots shown in Figures 7 through 9 are generated using the Matlab script below. Note that in the first two Nyquist diagrams the point (−1, 0) is not encircled, indicating that if we close the loop with unity negative feedback the systems will still be stable. On the other hand, the third Nyquist diagram has two clockwise encirclements. Having no zeros, we have P = Z − N = 0 − (−2) = 2 poles of the closed loop system in the right half plane. This is shown in the following Matlab transcript fragment. >> clf = feedback(tf([10],[1 3 3 1]),1) Transfer function: 10 ---------------------s^3 + 3 s^2 + 3 s + 11 >> roots([1 3 3 11]) ans = -3.1544 0.0772 + 1.8658i 0.0772 - 1.8658i % % MP9_2.m solves part of problem % % 17 April 05 --sk % figure(2) nyquist(tf([1],[1 1])); title(’Nyquist diagram for MP9.2a print -deps mp9_2a figure(3) nyquist(tf([20],[1 8 14])); title(’Nyquist diagram for MP9.2b print -deps mp9_2b figure(4) nyquist(tf([10],[1 3 3 1])); title(’Nyquist diagram for MP9.2c print -deps mp9_2c MP9_2 from Dorf and Bishop 10th ed. G(s) = 1/(s+1)’) G(s) = 20/(s^2+8s+14)’) G(s) = 10/(s+1)^3’) MP9.6 We are given a unity negative feedback system with forward path transfer function Gc (s)G(s) = 10(s + 3)(−b0 )(s2 − 2500) s(s − 3)(s2 + 50s + 1000) (11) where b0 = 0.5. We are asked to (a) use the Matlab margin command to find the phase and gain margins and crossover frequencies, (b) determine from the results of part (a), the ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 11 Figure 7: Nyquist plot for MP9.2a Nyquist diagram for MP9.2a G(s) = 1/(s+1) 1 0.8 0.6 0.4 Imaginary Axis 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 −1 −0.8 −0.6 −0.4 −0.2 0 Real Axis 0.2 0.4 0.6 0.8 1 maximum value of b0 for which stability is retained, and (c) verify our answer to part (b) using the Routh-Hurwitz criterion. Solution: (a) The gain margin is 2.23 at 26.38 rad/s and the phase margin is 26.33 deg at the crossover frequency 12.65 rad/s. The Matlab commands used to generate this information are shown below. b0 = 0.5 Gc = tf(10*[1 3],[1 0]) G = tf(-b0*[1 0 -2500],conv([1 -3],[1 50 1000])) oltf = series(Gc,G) [Gm,Pm,Wcg,Wcp] = margin(oltf) (b) The gain margin being 2.23, we can increase the gain from b0 = 0.5 to 1.12 ≈ 2.23b0 . ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 12 Figure 8: Nyquist plot for MP9.2b Nyquist diagram for MP9.2b G(s) = 20/(s2+8s+14) 1 0.8 0.6 0.4 Imaginary Axis 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 −1 −0.5 0 0.5 1 1.5 Real Axis (c) The closed loop transfer function is (after some algebra) −10b0 (s + 3)(s + 50)(s − 50) + (47 − 10b0 + (1000 − 150 − 30b0 )s2 + (−3000 + 25000b0 )s + 75000b0 (12) so the Routh array is as shown in Table 2. I used Maple to do the calculations for the Routh array which are quite messy. The Maple commands I used were as follows. (I think that there is supposed to be a way to do this in Matlab as well, but Maple is better suited for this type of computation so I use it instead.) T (s) = > > > > > s4 )s3 # maple script for computing Routh-Hurwitz array for MP9.6 with(linalg): r1 := array([1,850-30*b0,75000*b0]); r2 := array([47-10*b0,-3000+25000*b0,0]); r3 := array([simplify(-1/r2[1]*(r1[1]*r2[2]-r1[2]*r2[1])), -1/r2[1]*(r1[1]*r2[3]-r1[3]*r2[1]),0]); > r4 := array([simplify(-1/r3[1]*(r2[1]*r3[2]-r2[2]*r3[1])), -1/r3[1]*(r2[1]*r3[3]-r2[3]*r3[1]),0]); ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 13 Figure 9: Nyquist plot for MP9.2c Nyquist diagram for MP9.2c G(s) = 10/(s+1)3 8 6 4 Imaginary Axis 2 0 −2 −4 −6 −8 −4 −2 0 2 4 6 8 10 Real Axis > r5 := array([simplify(-1/r4[1]*(r3[1]*r4[2]-r3[2]*r4[1])), -1/r4[1]*(r3[1]*r4[3]-r3[3]*r4[1]),0]); Now, analyzing the Routh array, we see from the second row that we need b0 < 4.7. Next, using the Matlab command >> roots([30 -3491 4295]) ans = 115.1231 1.2436 and noting that if b0 < 4.7, the denominator of the first element of the third row will be negative and we have a negative in front of the fraction, so we want the factor in the parentheses to be positive, which it is if b0 < 1.2436 or b0 > 115.1231. The second option would conflict with b0 < 4.7 so we can summarize our constraints so far as b0 < 1.2436. From the fourth row, using the Matlab command ECE382/ME482 Spring 2005 Homework 7 Solution April 17, 2005 14 >> roots([160630 -202561 25770]) ans = 1.1175 0.1436 and then using the Maple commands > subs(b0=0.13,r4[1]); -280.0491816 > subs(b0=0.15,r4[1]); 132.5514810 > subs(b0=1.2,r4[1]); -46993.28859 we determine that we need 0.1436 < b0 < 1.1175. Thus we have finally determined that for stability we need 0.1444 < b0 < 1.1175. The upper bound on b0 agrees with that determined from the gain margin and that determined using the Routh-Hurwitz criterion. Note, however, that the gain margin approach did not tell us that there is also a minimum acceptable value for b0 to retain stability. Table 2: Routh array for MP9.6c s4 : s3 : s2 : s1 : s0 : 1 47 − 10b0 10(4295−3491b0 +30b20 ) −47+10b0 500(160630b20 −202561b0 +25770) − 30b20 −3491b0 +4295 − 75000b0 850 − 30b0 −3000 + 25000b0 75000b0 75000b0