a pseudo-ccm buck converter with freewheel switching control
advertisement

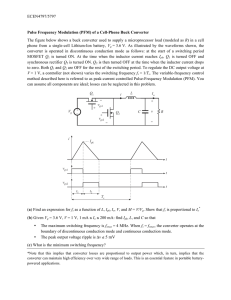
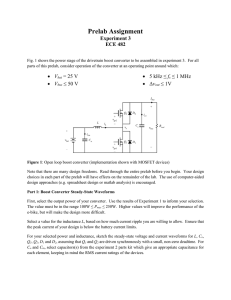
A Pseudo-CCM Buck Converter With Freewheel Switching Control Zongqi HU Dongsheng MA Dept. of Electrical & Computer Engineering University of Arizona Tucson, Arizona 85721, USA zongqih@ece.arizona.edu Dept. of Electrical & Computer Engineering University of Arizona Tucson, Arizona 85721, USA ma@ece.arizona.edu Abstract—this paper presents a new switching buck converter operating in pseudo-CCM mode with freewheel switching control. Compared with conventional buck converters, it can handle large current stress with small current ripple. In addition, because there is only one low-frequency single pole in power-stage transfer function, large loop-gain bandwidth and thus fast transient response become easily achievable by proper compensation technique. Simulation results verify these features in frequency and time domains respectively. The design provides a good solution to high-current fast-transient power supplies. I. large switching noises are generated and then coupled into the substrate of IC system, severely degrading the performance and reliability. Hence, it will be very desirable if a new type of converter can be invented, which not only handles large current stress, but also has large loop-gain bandwidth. This paper investigates one possible solution of using freewheel switching technique and pseudo-continuous conduction operation to meet this demand. II. BANDWIDTH S1 INTRODUCTION Development of VLSI microprocessor technology poses new challenges for the power supplies. With the supply voltage scaling down from 5V to 3.3V, 2.5V and even 0.8V in the future [1], the current that the microprocessors draw increases from 13A to 30~50A due to ever-increasing system complexity and operating frequency [2]. High output current and fast transient response power supplies are on great demands by next-generation microprocessors. Switch mode power converter, or switching converter in short, is well known for high efficiency and flexible voltage conversion. Most of today’s voltage regulation modules adopt buck converter topology. By operating in continuous conduction mode (CCM), a conventional buck converter can deliver large current to the load. However, for voltage-programming case, due to the existence of the complex poles in the loop gain transfer function, it is very difficult to design the compensation network to achieve a wide loop-gain bandwidth and thus fast response [3]. Even if the converter in current-programming mode has two separated real poles in transfer function, which makes a wide loop-gain bandwidth possible, special current sensing circuit is required and ramp compensation has to be done to avoid sub-harmonic oscillation [5]. This makes the converter very sensitive to current sensing signal, which normally carries switching noise. The corresponding circuit design could be very complicated. (Thus, our discussion in this paper will focus on the voltage-programming converters). If the converter operates in discontinuous conduction mode (DCM), the loop gain exhibits a first-order behavior, which makes the design of the compensation network much easier [4]. Unfortunately, DCM operation can only provide limited power to the load. If heavy load current is required, the peak of the inductor current has to be very high, which introduces large current ripples. For integrated implementations, Vg L C S2 R Vo Power Stage R1 CMP Q R Q S - Va EA A(s) + + bVo Vref R2 Va Control Loop Clock (from OSC) Ramp (from OSC) Fig. 1 A conventional buck switching converter Fig. 1 depicts a conventional buck switching converter. Based on the level of inductor current, the converter has two operation modes, CCM and DCM. If the load is heavy (R is small), the inductor current is always above zero and the operation is in CCM, as shown in Fig. 2(a); and if the load is light (R is large), the inductor current will fall to zero at one instant and the converter operates in DCM, as shown in Fig. 2(b). In CCM, one switching cycle Ts is divided into two parts: D1Ts and D2Ts (D1+D2=1). The inductor current increases linearly in D1Ts when S1 is on and S2 is off, and drops linearly in D2Ts when S1 is off and S2 is on. While in DCM, one switching cycle is composed of three parts: D1Ts, D2Ts and D3Ts (D1+D2+D3=1). The inductor current waveform in D1Ts and D2Ts is similar to that in CCM, but it stays at zero during D3Ts, when both S1 and S2 are off. To supply the same heavy loads such as microprocessors, CCM increases the inductor’s DC current level IO (Fig. 2(a)), while keeping relatively small current ripple ∆I such that the output ripple voltage is small. However, in DCM, smaller value of inductor has to be chosen for the same heavy load. As This research is supported by National Science Foundation I/UCRC Center for Telecommunication Connection One. 0-7803-8834-8/05/$20.00 ©2005 IEEE. CONCERNS ON CURRENT RIPPLE AND LOOP-GAIN 3083 results, the peak inductor current Ipk and current ripple ∆I will be very large, which generates large switching noise and ripple voltages at the output. D2Ts ∆I Io Io ∆I (b) I pk (a) I pk D1Ts D1Ts in parallel with the inductor. During D1Ts, S1 is turned on and S2 and S3 are off. The inductor current increases with a slope of (Vg– Vo)/L. In D2Ts, S1 is turned off and S2 is turned on. The inductor current drops with a slope of – Vo/L, until it hits a certain level of Idc. Then the converter enters D3Ts, when S3 is turned on while S1 and S2 are off. The inductor current will stay at the constant Idc, since the switch S3 shorts the inductor L at this moment. The operation of freewheel switching buck converter is similar to a DCM one in a conventional converter. But the inductor current stays at a constant Idc in stage 3 instead of falling to zero, which gives the converter the ability to output larger current while keeping the current ripple lower. As shown in Fig. 6, by adjusting the Idc and the duration of D3Ts, this scheme can achieve similar current handling ability as a CCM one does, and its current ripple is much smaller than the DCM’s. This operation mode was named as Pseudo-CCM (PCCM) in [6]. D2Ts D3Ts S3 Fig. 2 Inductor current of a switching converter in (a) CCM, and (b) DCM S1 In frequency domain, characteristics of CCM converters also differ from those of DCM ones. For a CCM buck converter, the transfer function of the power stage has a pair of low-frequency complex poles [3]. While in DCM, it has only one low-frequency pole [4]. So for CCM, dominant-pole compensation is normally used to stabilize the system, as shown in Fig. 3, sacrificing the bandwidth of the overall loop gain. As a result, a sluggish response is usually found in transient performance. Thus, trade-off exists between current handling ability and loop-gain bandwidth in conventional switching converters. Overall L Vg S2 Current Sensor C R Vo R1 Buffer Va CMP - Digital Logic bVo EA - A(s) + R2 + Va Clock (from OSC) Error Amplifier Ramp (from OSC) Fig. 4 The proposed converter with freewheel switching Power Stage Ga in(dB) D1Ts D2Ts D3Ts fs f(HZ) S1 P ha se Bandwidth Error Amplifier fs S2 f(HZ) -90o Phase Margin S3 -180 o Overall Power Stage -270o IL I dc Fig. 3 Dominant-pole compensation in a CCM buck converter III. THE PROPOSED CONVERTER WITH FREEWHEEL Fig. 5 Timing diagram of the converter with freewheel switching 3084 ∆I pk CCM ∆I pk PCCM I pk CCM ∆I pk DCM I pk PCCM A freewheel switching technique is proposed in [6, 7] to effectively reduce the peak inductor current in single-inductor multiple-output (SIMO) switching converters. Due to the timemultiplexing between the sub-converters, the improvement in transient performance is not obvious. However, if the technique is applied in single-output converters, both current handling capability and transient response can be significantly enhanced. This motivates us to propose a new switching converter with freewheel switching control, as depicted in Fig. 4. The converter’s timing diagram is illustrated in Fig. 5. Different from a conventional buck converter, an additional switch S3, the freewheeling switch, is added I pk DCM SWITCHING CONTROL Io I dc Fig. 6 Inductor current waveforms in the three different operation modes In frequency domain, DCM operation is very attractive, since the converter exhibits a single-pole behavior instead of complexpoles in CCM [4]. This can be intuitively explained by the phase plane shown in Fig. 7. During D3Ts, the inductor current becomes zero. Only the output voltage information can be transferred to the next switching cycle. No current information is available. Thus, the order of the system is reduced to 1. The smaller close loop in Fig. 7 is the phase plane for PCCM converter. During D3Ts, the inductor current settles at a constant Idc. Since no small ac signal is carried in the inductor current in this period, similarly, the transfer function of PCCM converter should also be first-order at low frequency, which will be verified by our simulations later. Therefore, the bandwidth of the loop gain can be easily extended for fast response. The addition of the switch S3 increases silicon area in fabrication. However, by adjusting the D3Ts and Idc level, the size of the power transistor can be minimized. For example, in the designs of [6, 7], the size of S3 is only 1/20 of that of S1 in Fig. 4. The increase of the entire silicon area is less than 3.5%. Dominant-pole compensation is used for both. In Fig. 9, three poles are found: one single pole from the error amplifier and a pair of complex poles from the power stage. The quadratic property of conventional buck converter in CCM can be identified and the complex poles are located where a sharp drop occurs in the phase panel. In Fig. 10, only two single poles are found: one from the error amplifier and the other due to the power stage. The result shows that the PCCM is a single pole power converter. Hence, polezero cancellation can be used to extend the bandwidth. The idea is illustrated in Fig. 11. In this method, the bandwidth is limited by the switching frequency, which can thus be much wider than the one by dominant-pole compensation. Fig. 12 shows the loop gain of PCCM converter using pole-zero compensation. Compared to the results in Fig. 10, the loop-gain bandwidth is extended by around 20 times. Fig. 8 Output voltages and inductor currents of three converters in steady state. Fig. 7 Phase planes of DCM and PCCM converters IV. SIMULATION RESULTS Table 1 Design specifications of the three converters DCM CCM PCCM Filter capacitor C (µF) 50 20 20 Inductor L (µH) 10 20 20 Load R (Ω) Switching frequency fs (kHz) Input voltage Vg (V) 6 6 6 100 100 100 10 10 10 Output voltage VO (V) 6 6 6 Voltage reference Vref (V) 2 2 2 Scaling factor b 1/3 1/3 1/3 Fig. 9 Loop gain of CCM buck converter with dominant-pole compensation A PCCM buck converter with freewheel switching is designed. For comparison, one DCM and one CCM buck converter are also designed with the same specifications shown in Table 1. Note that, in order to provide the same load current, the value of the inductor in DCM case has to be smaller. First, the steady state performances are simulated. Fig. 8 shows the output voltages and the inductor currents in the three operation modes. With the same load, current ripple in DCM case is twice as much as the others, with the largest output ripple voltage. The loop gains of the CCM and PCCM converters are then simulated, respectively. The simulation method can be found in [8]. 3085 Fig. 10 Loop gain of PCCM buck converter with dominant-pole compensation [3] Overall Error Amplifier [4] Ga in(dB) Power Stage [5] fs f(HZ) Bandwidth P ha se [6] fs Power Stage f(HZ) [7] -90 o -180o Phase Margin Overall Error Amplifier [8] W-H. Ki, “Signal flow graph in loop gain analysis of dc-dc PWM CCM siwtching converters”, IEEE Trans. On Ckts & Sys. I, No.6, pp.644-654, June 1998. J. Sun, D. M. Mitchell, M. F. Greuel, P. T. Krein, and R. M. Bass, “ Modeling of PWM converters in discontinous conduction mode – a reexamination,” IEEE, PESC’98 Record, vol.1, pp. 615-622, 1998. W-H. Ki, “Analysis of subharmonic oscillation of fixed-frequency current-programming switch mode power converters”, IEEE Trans. On Ckts & Sys. I, Vol. 45, Issue: 1, pp. 104 – 108, Jan. 1998 D. Ma, W-H. Ki, C. Y. Tsui, “A pseudo-CCM/DCM SIMO switching converter with freewheel switching,” in IEEE Int. Solid-State Circuits Conf.(ISSCC), pp. 390-391, Feb 2002. D. Ma, W-H. Ki, C. Y. Tsui, “A pseudo-CCM/DCM SIMO switching converter with freewheel switching,” in IEEE Journal of Solid-State Circuits, vol. 38, No. 6, pp. 1007-1014, June 2003. D. Ma, et al, “A CAD simulator based on loop gain measurement for switching converters”, ISCAS’04, Volume 5, pp. 23-26, May, 2004. Fig.11 Pole-zero cancellation of PCCM buck converter Fig. 13 Start-up transient of CCM buck converter Fig. 12 Loop gain of PCCM buck converter with pole-zero compensation The start-up transient responses of CCM buck converter and PCCM buck converter with dominant-pole and pole-zero compensation are shown in Fig. 13, 14 and 15, respectively. The results coincide well with our frequency-domain analysis. The damping behavior in Fig. 13 clearly shows the three-pole characteristics of CCM converter. Compared with Fig. 14, the PCCM converter in Fig. 15 settles very fast due to largely extended bandwidth. V. CONCLUSION A pseudo CCM buck converter with freewheel switching control is proposed in this paper. The new converter inherits the advantages of both CCM and DCM converters: it can handle large current stress while maintaining low current ripple and switching noise; the power stage only introduces one single low-frequency pole. Pole-zero compensation can thus be used to extend the bandwidth. Simulation results successfully verify the merits of the proposed design. Fig. 14 Start-up transient of PCCM buck converter with dominant-pole compensation REFERENCES [1] [2] International Technology Roadmap for Semiconductors, 2003 Edition, http://public.itrs.net/. M. T. Zhang, M. M. Jovanovic, and F. C. Lee, “Design consign considerations for low-voltage on-board DC/DC modules for next generations of data processing circuits,” IEEE Trans. Power Electron., vol. 11, Mar. 1996. Fig. 15 Start-up transient of PCCM buck converter with pole-zero compensation 3086