“JUST THE MATHS” UNIT NUMBER 16.8 Z
advertisement

“JUST THE MATHS”
UNIT NUMBER
16.8
Z-TRANSFORMS 1
(Definition and rules)
by
A.J.Hobson
16.8.1
16.8.2
16.8.3
16.8.4
16.8.5
Introduction
Standard Z-Transform definition and results
Properties of Z-Transforms
Exercises
Answers to exercises
UNIT 16.8 - Z TRANSFORMS 1 - DEFINITION AND RULES
16.8.1 INTRODUCTION - Linear Difference Equations
Closely linked with the concept of a linear differential equation with constant coefficients is
that of a “linear difference equation with constant coefficients”.
Two particular types of difference equation to be discussed in the present section may be
defined as follows:
DEFINITION 1
A first-order linear difference equation with constant coefficients has the general form,
a1 un+1 + a0 un = f (n),
where a0 , a1 are constants, n is a positive integer, f (n) is a given function of n (possibly zero)
and un is the general term of an infinite sequence of numbers, {un } ≡ u0 , u1 , u2 , u3 , . . . .
DEFINITION 2
A second-order linear difference equation with constant coefficients has the general form,
a2 un+2 + a1 un+1 + a0 un = f (n),
where a0 , a1 , a2 are constants, n is an integer, f (n) is a given function of n (possibly zero)
and un is the general term of an infinite sequence of numbers, {un } ≡ u0 , u1 , u2 , u3 , . . . .
Notes:
(i) We shall assume that the sequences under discussion are such that un = 0 whenever
n < 0.
(ii) Difference equations are usually associated with given “boundary conditions”, such as the
value of u0 for a first-order equation or the values of u0 and u1 for a second-order equation.
ILLUSTRATION
Certain simple difference equations may be solved by very elementary methods.
1
For example, suppose that we wish to solve the difference equation,
un+1 − (n + 1)un = 0,
subject to the boundary condition that u0 = 1.
We may rewrite the difference equation as
un+1 = (n + 1)un
and, by using this formula repeatedly, we obtain
u1 = u0 = 1, u2 = 2u1 = 2, u3 = 3u2 = 3 × 2, u4 = 4u3 = 4 × 3 × 2, . . . .
In general, for this illustration, un = n!.
However, not all difference equations can be solved as easily as this and we shall now discuss
the Z-Transform method of solving more advanced types.
16.8.2 STANDARD DEFINITION AND RESULTS
THE DEFINITION OF A Z-TRANSFORM (WITH EXAMPLES)
The Z-Transform of the sequence of numbers, {un } ≡ u0 , u1 , u2 , u3 , . . . ., is defined by
the formula,
Z{un } =
∞
X
ur z −r ,
r=0
provided that the series converges (allowing for z to be a complex number if necessary).
EXAMPLES
1. Determine the Z-Transform of the sequence,
{un } ≡ {an },
where a is a non-zero constant.
2
Solution
Z{an } =
∞
X
ar z −r .
r=0
That is,
Z{an } = 1 +
a a2 a3
1
+ 2+ 3+ .... =
z z
z
1−
=
a
z
z
,
z−a
by properties of infinite geometric series.
Thus,
Z{an } =
z
.
z−a
2. Determine the Z-Transform of the sequence,
{un } = {n}.
Solution
Z{n} =
∞
X
rz −r .
r=0
That is,
Z{n} =
1
2
3
4
+ 2+ 3+ 4+ ....,
z z
z
z
which may be rearranged as
1
1
1
1
1
1
1
1
Z{n} =
+ 2+ 3+ .... + 2+ 3+ 4+ .... + 3+ 4+ .... ,
z z
z
z
z
z
z
z
giving
Z{n} =
1
z
1−
1
z
+
1
z2
1−
1
z
+
1
z3
1−
1
z
1
+ ....=
1−
by properties of infinite geometric series.
Thus,
Z{n} =
z
z
=
.
2
(1 − z)
(z − 1)2
3
"
1
z
1
z
1−
#
1
z
,
Note:
Other Z-Transforms may be obtained, in the same way as in the above examples, from the
definition.
We list, here, for reference, a short table of standard Z-Transforms, including those already
proven:
A SHORT TABLE OF Z-TRANSFORMS
{un }
Z{un }
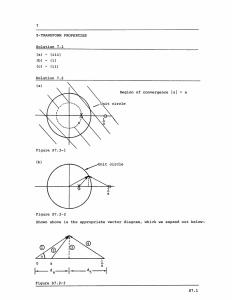
Region of Existence
{1}
z
z−1
|z| > 1
{an } (a constant)
z
z−a
|z| > |a|
{n}
z
(z−1)2
|z| > 1
z
z−e−T
|z| > e−T
sin nT (T constant)
z sin T
z 2 −2z cos T +1
|z| > 1
cos nT (T constant)
z(z−cos T )
z 2 −2z cos T +1
|z| > 1
1 for n = 0
0 for n > 0
(Unit pulse sequence)
1
All z
0 for n = 0
{an−1 } for n > 0
1
z−a
|z| > |a|
n
e−nT
o
(T constant)
4
16.8.3 PROPERTIES OF Z-TRANSFORMS
(a) Linearity
If {un } and {vn } are sequences of numbers, while A and B are constants, then
Z{Aun + Bvn } ≡ A.Z{un } + B.Z{vn }.
Proof:
The left-hand side of the above identity is equivalent to
∞
X
(Aur + Bvr )z −r ≡ A
r=0
∞
X
ur z −r + B
r=0
∞
X
vr z −r ,
r=0
which, in turn, is equivalent to the right-hand side.
EXAMPLE
Z{5.2n − 3n} =
3z
5z
−
.
z − 2 (z − 1)2
(b) The First Shifting Theorem
1
Z{un−1 } ≡ .Z{un },
z
where {un−1 } denotes the sequence whose first term, corresponding to n = 0, is taken as
zero and whose subsequent terms, corresponding to n = 1, 2, 3, 4, . . . ., are the terms
u0 , u1 , u3 , u4 , . . . of the original sequence.
Proof:
The left-hand side of the above identity is equivalent to
∞
X
r=0
ur−1 z −r ≡
u0 u 1 u 2 u3
+ 2 + 3 + 4 + . . . .,
z
z
z
z
5
since it is assumed that un = 0 whenever n < 0.
Thus,
1
u1 u 2 u 3
Z{un−1 } ≡ . u0 +
+ 2+ 3+ .... ,
z
z
z
z
which is equivalent to the right-hand side.
Note:
A more general form of the first shifting theorem states that
Z{un−k } ≡
1
.Z{un },
zk
where {un−k } denotes the sequence whose first k terms, corresponding to
n = 0, 1, 2, . . . . , k − 1, are taken as zero and whose subsequent terms, corresponding to
n = k, k + 1, k + 2, . . . . are the terms u0 , u1 , u2 , . . . . of the original sequence.
ILLUSTRATION
Given that {un } ≡ {4n }, we may say that
Z{un−2 } ≡
1
1
z
1
.Z{u
}
≡
.
≡
.
n
z2
z2 z − 4
z(z − 4)
Note:
In this illustration, the sequence, {un−2 } has terms 0, 0, 1, 4, 42 , 43 , . . . and, by applying
the definition of a Z-Transform directly, we would obtain
Z{un−2 } =
1
4
42 43
+
+
+
. . . .,
z2 z3 z4 z5
which gives
Z{un } ≡
1
1
.
2
z 1−
by properties of infinite geometric series.
6
4
z
≡
1
,
z(z − 4)
(c) The Second Shifting Theorem
Z{un+1 } ≡ z.Z{un } − z.u0
Proof:
The left-hand side of the above identity is equivalent to
∞
X
r=0
ur+1 z −r ≡ u1 +
u2 u3 u 4
+ 2+ 4+ ....
z
z
z
This may be rearranged as
u1 u2 u3 u 4
z. u0 +
+ 2 + 3 + 4 + . . . . − z.u0
z
z
z
z
which, in turn, is equivalent to the right-hand side.
Note:
This “recursive relationship” may be applied repeatedly. For example, we may deduce
that
Z{un+2 } ≡ z.Z{un+1 } − z.u1 ≡ z 2 .Z{un } − z 2 .u0 − z.u1
16.8.4 EXERCISES
1. Determine, from first principles, the Z-Transforms of the following sequences, {un }:
(a)
{un } ≡ {e−n };
(b)
{un } ≡ {cos πn}.
7
2. Determine the Z-Transform of the following sequences:
(a)
{un } ≡ {7.(3)n − 4.(−1)n } ;
(b)
n
o
{un } ≡ 6n + 2e−5n ;
(c)
{un } ≡ {13 + sin 2n − cos 2n} .
3. Determine the Z-Transform of {un−1 } and {un−2 } for the sequences in question 1.
4. Determine the Z-Transform of {un+1 } and {un+2 } for the sequences in question 1.
16.8.5 ANSWERS TO EXERCISES
1. (a)
ez
;
ez − 1
(b)
z
.
z+1
2. (a)
7z
4z
−
;
z−3 z+1
(b)
6z
2z
+
;
2
(z − 1)
z − e−5
(c)
13z
z(sin 2 + cos 2 − z)
+ 2
.
z−1
z − 2z cos 2 + 1
8
3. (a)
Z{un−1 } ≡
e
(n > 0),
ez − 1
Z{un−2 } ≡
e
(n > 1);
z(ez − 1)
1
(n > 0),
z+1
Z{un−2 } ≡
1
(n > 1).
z(z + 1)
z
,
ez − 1
Z{un+2 } ≡
z
;
e(ez − 1)
(b)
Z{un−1 } ≡
Note:
u−2 = 0 and u−1 = 0.
4. (a)
Z{un+1 } ≡
(b)
Z{un+1 } ≡ −
z
z
, Z{un+2 } ≡
.
z+1
z+1
9