FREQUENCY RESPONSE ANALYSIS
advertisement

FREQUENCY RESPONSE ANALYSIS
Introduction
The system characteristics are described using a
steady-state sinusoidal input signal and considering
the response of the system as the frequency of the
sinusoid is varied. The frequency response is defined
as the steady-state response of the system to a
sinusoidal input signal.
s = jω
G( s ) ⎯ ⎯⎯→ G( jω )
Forms of plotting G(jω) -- Bode, Nyquist, Nichols(gain-
phase) plot.
Experimental information can be used for design
purposes.
Correlation of the sinusoidal and time response
F ( s ) = L [ f ( t )] =
∫
∞
0
f ( t )e − st dt
1 σ + j∞
st
f ( t ) = L [ F ( s )] =
F
(
s
)
e
ds
∫
−
j
∞
σ
2πj
−1
Laplace Transform
where s = σ + jω
F ( jω ) = F[ f ( t )] =
∞
∫−∞
f ( t )e − jωt dt
1 j∞
jω t
f ( t ) = F [F ( jω )] =
F
(
j
ω
)
e
dω Fourier Transform
∫
2πj j∞
−1
Laplace Transform :
Fourier Transform :
poles and zeros on s-plane
amplitude and phase information
corresponding to a sinusoidal input.
∞
∫ | f ( t )| dt < ∞
→
Fourier transform exists
−∞
Let y(s) = T(s)r(s),
1
then y ( t ) =
2π
∞
jωt
ω
ω
T
(
j
)
r
(
j
)
e
dω
∫
−∞
Complex variable
(a). s = σ + jω
Cartesian coordinate
(b). s = r ( cosθ + jsinθ )
Polar coordinate
(c). s = r ejθ
Euler
form
ω
r
σ
θ
Bode Plot H.W. Bode (Bell Lab. 1939-42)
Frequency response G(jω): the steady-state
response of a system (forced response of an
unstable system) with transfer function G(s) to a
sinusoid of unit amplitude and frequency ω is a
sinusoid of amplitude A(ω) and phase Φ(ω),
where G(jω) = A(ω) e
jΦ(ω)
.
Example
Consider the system response described by
ω
Y (s) = G(s) 2
, a partial-fraction expansion
2
s +ω
corresponding to Y(s) is
b1
b2
b0
b0*
Y ( s) =
+
+ LL +
+
s + a1 s + a2
s + jω s − jω
and
− jφ
⎡ G ( s )ω ⎤
G ( − jω ) G ( jω ) e
b0 = ⎢
=
=
⎥
− j2
−2j
⎣ s − jω ⎦ s = − jω
jφ
⎡ G ( s )ω ⎤
G ( jω ) G ( jω ) e
b0 * = ⎢
=
=
⎥
j2
2j
⎣ s + j ω ⎦ s = jω
e j (ω t +φ ) − e − j (ω t +φ )
= sin(ω t + φ )
2j
⎧⎪ Re( G ( jω ) ) ⎫⎪
φ = tan ⎨
⎬
Im(
G
(
j
ω
)
)
⎪⎩
⎪⎭
−1
y (t ) = b1e − a1t + b2 e − a2t + LL + G ( jω ) sin(ω t + φ )
y (∞) = G ( jω ) sin(ω t + φ )
for a stable system
∴ A(ω ) = G (ω ) and φ (ω ) = ∠(G (ω ) )
1
Input
signal
0.5
gain
A(ω)
time (sec)
0
phase
Φ(ω)
Output
signal
-0.5
-1
0
2
4
6
8
The Bode plotting technique allows plotting frequency
response in an efficient way and it is sufficient for control
system design.
1)
magnitude curve (log. Scale dB)
vs. frequency (log. Scale radians/second)
2)
phase curve (linear scale degree or radian)
vs. frequency (log. scale)
This allows the plotting of a high-order G(jω) by
simple graphical addition of the separate terms.
Example
v
⎛ r1 ⎞ j (φ1 −φ2 −φ3 )
s1
G ( jω ) = v v = ⎜
⎟e
s2 ⋅ s3 ⎝ r2 ⋅ r3 ⎠
r1
G ( jω ) =
⇒ log10 G ( jω ) = log10 r1 − log10 r2 − log10 ⋅ r3
r2 ⋅ r3
arg{G ( jω )} = φ1 − φ2 − φ3
log10 Ae jφ =
log10 A
+j {
φ
log10 e
123
phase plot
magnitute plot
ln G ( jω ) = ln | G (ω ) | + jφ (ω )
The unit of the magnitude plot
P2
G dB = 10 log10
P1
V2
= 20 log10
V1
dB (decibels): 20log10|G|
(Alexander Graham Bell)
The unit of the phase plot
Degree or radian
1
0
Example
s+8
G( s) = 2
s + 2 s + 10
s+8
=
( s + 1 + 3 j )( s + 1 − 3 j )
jω
5
0
-5
jω + 8
G ( jω ) =
( jω + 1 + 3 j )( jω + 1 − 3 j )
-10
-10
( jω ) − ( −8)
=
(( jω ) − ( −1 − 3 j ))(( jω ) − ( −1 + 3 j ))
π dis ( zi , jω )
G ( jω ) = i
π dis ( pk , jω )
k
-8
-6
-4
-2
0
2
, arg{G ( jω )} = ∑ arg( zi , jω ) − ∑ arg( pk , jω )
i
k
Example
Let
s = jω , then the frequency response can be
obtained as
2
G ( jω ) =
jω ( jω + 1)( jω + 2)
Gain and phase of the frequency response are
1
1
1
2
G ( jω ) = 2
=
jω jω + 1 jω + 2 ω (1 + ω 2 )( 4 + ω 2 )
1
1
1
∠G ( jω ) = ∠
+∠
+∠
jω
jω + 1
jω + 2
−1
= −90 − tan ω − tan
o
−1 ω
2
20 log G ( jω ) (dB) ∠ G ( jω ) (度 )
ω(rad/sec)
G ( jω )
0.01
100
40
-90.9
0.05
20
26
-94.3
0.1
10
20
-98.6
0.5
1.7
4.8
-130.6
1
0.63
-4
-161.6
5
1 .5 × 10 −2
-36.7
-236.9
10
2 × 10 −3
-54.2
-253
50
1 .6 × 10 −5
-96
-266.6
100
2 × 10 −6
-114
-268.3
G ( jω )
∠G ( jω ) 100
G ( jω )
50
0
-50
-100
-150
degree
-200
-250
-300
0
20
40
60
frequency
80
(rad/sec)
100
G ( jω )
∠G ( jω )
50
G ( jω ) in dB
0
-50
degree
-100
-150
-200
-250
0.01
0.1
1
frequency
10
(rad/sec)
100
The advantages of using Bode
technique
Bode plots of systems in series simply add.
A much wider range of system behaviour can
be displayed on a signal plot.
Bode plot can be determined experimentally.
Integration of system analysis and design.
Bode form of the transfer function
(b1s + 1)(b2 s + 1)LL
kG ( s ) = k0 l
s ( a1s + 1)( a2 s + 1)LL
For type 0 system and s=jω , k0 is the gain at ω = 0 and
k0 is called the dc gain of the system.
Classes of terms of transfer functions
(1). k0
ω
(3). ( j
+ 1) ±1
ωc
(2). ( jω ) ± n
⎡⎛ jω ⎞
⎤
jω
(4). ⎢⎜
+ 1⎥
⎟ + 2ζ
ωn ⎥
⎢⎝ ω n ⎠
⎣
⎦
2
±1
k = -0.1
(rad/sec)
constant gain : k
-20 dB
(degree)
180
magnitude:
20 log |k|
(rad/sec)
phase:
⎧⎪ 0o
⎨ o
⎪⎩180
if k is positive
if k is negative
Im
jω
s-plane
Re
( jω ) ±1
magnitude:
20 log ω ±1
phase:
±90o
1
s
20 dB
0.1
0.1
1
-90o
rad/sec
1
rad/sec
magnitude plot
phase plot
Im
ωc
φc
jωc
Re
ω
(j
+ 1) ±1
ωc
2⎤
⎡
⎛ω ⎞
⎛ω ⎞
±20 log 1 + ⎜ ⎟ = ±10 log ⎢1 + ⎜ ⎟ ⎥
⎝ωc ⎠
⎢ ⎝ωc ⎠ ⎥
⎣
⎦
2
magnitude:
phase:
−1 ⎡
ω ⎤
tan ⎢±
⎥
ω
c⎦
⎣
Asymptotes
0
dB
-10
|G(jω)|
-20
-30
-40 -2
10
-1
10
0
10
frequency
1
10
2
10
(rad/sec)
Corner frequency: ωc
± 3dB correction at breakpoint
Asymptotes
0
(degree)
-20
-40
arg{G(jω)}
-60
-80
-100
-2
10
-1
10
10
0
freuency
10
1
10
2
(rad/sec)
⎡⎛ jω ⎞
jω ⎤
+ 1⎥
⎟ + 2ζ
⎢⎜
ωn ⎥
⎢⎣⎝ ω n ⎠
⎦
2
magnitude:
phase:
±1
⎧⎡
2 ⎤2
2⎫
⎡ 2ζω ⎤ ⎪
⎛ ω ⎞
⎪
⎢
⎥
+⎢
±10 log ⎨ 1 − ⎜
⎟
⎥ ⎬
⎣ ωn ⎦ ⎪
⎪⎢⎣ ⎝ ω n ⎠ ⎥⎦
⎩
⎭
⎡
⎛ ω ⎞⎤
⎢ ±2ζ ⎜
⎟⎥
⎝ωn ⎠ ⎥
−1 ⎢
tan ⎢
2⎥
⎢1 − ⎛ ω ⎞ ⎥
⎢ ⎜⎝ ω ⎟⎠ ⎥
n
⎣
⎦
jω
jω n
− ζω n + j 1 − ζ 2
ωn
− ζω n − j 1 − ζ 2
50
1
G( s) = 2
s + 0.4 s + 1
0
-50 -1
10
10
0
10
1
0
-100
-200 -1
10
10
0
10
1
ζ = 0 .2
ω n = 1 rad / sec
Frequency response of 2nd order system
ωr = ωn 1 − 2ζ 2 , ζ < 0.707
−1
M pω
= G ( ωr ) = ⎛⎜ 2ζ 1 − ζ 2 ⎞⎟ , ζ < 0.707
⎝
⎠
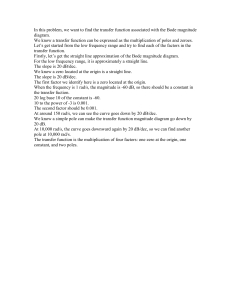
Frequency response measurements
The frequency response of a stable system can
be obtained using frequency response
analyzer. The system poles and zeros then
can be determined by the experimental data.
DC gain = 24.5 dB ≈ 16
poles: 15, 150 rad/sec
40
dB
20
0
-20
-40
-60
-2
10
10
0
10
2
4
10 rad/sec
0
degree
-50
16 × 15 × 150
G( s) =
( s + 15)( s + 150)
-100
-150
-200 -2
10
10
0
10
15
2
150
10
4
rad/sec
散戲