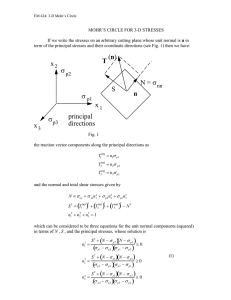
Stress and Mohr Diagram
advertisement

The concept of stress is extremely important to understanding why and how rocks deform and break. Stresses can be analyzed using plane geometries, Mohr circle diagrams, tensors, and lots of algebra. These methods can be used separately or in conjunction to explain how the structures that geologists observe form. There is no reason to “stress out” over the concept of stress. It may involve utilizing and keeping track of up to nine numbers algebraically, but its fundamentals are very straightforward. Force, Traction, Surface Stress Force – the push or pull acting on a body Traction – the force per unit area Surface stress – a pair of opposite but equal tractions acting on a surface of specific orientations Force • The push or pull acting on a body. • Forces are vector quantities having both a magnitude and direction. • There are internal and external forces. • Internal forces originate inside the body. They include atomic forces in crystalline lattices. Internal forces do not cause motion but do define material properties. • External forces originate outside the body and are important for stresses. There are two types; body and surface forces. • Body forces act on the mass particles themselves like gravity. • Surface forces are caused by one body, or at least part of a body, acting on another through a shared surface. • Two components of force important – normal (Fn) and shear (Fs). See Figure 7.3 Traction • The force intensity or the force per unit area acting on a plane. • Calculate by ! = F/A • The larger the area, the smaller the traction (inverse relationship). • Traction at a point calculated by ! = dF/dA • Traction also has normal and shear components: !n = Fn/A and !s = Fs/A Surface Stress • A material surface is defined as a set of material points that are constrained such that they cannot accelerate away from the material points surrounding it. This is enforced by Newtwon’s second law – a force acting on a surface must be opposed by an equal but opposite force. The same holds for tractions. • The surface stress is defined as the pair of equal and opposite tractions that act on a surface of specific orientation. • Surface stress can also be broken into normal and shear components. A Pair of equal but opposite shear stresses are sometimes referred to as shear couples. • One of the most common sign conventions, which is used in this class, is the Geologic Mohr Circle sign convention and is displayed in the Figure 7.4. • Compressive normal stresses are positive and tensile normal stresses are negative. Counterclockwise (sinistral) shear stresses are positive while clockwise (dextral) shear stresses are negative. Rock is almost always found in compression, hence positive values represent compression. The sign of the shear stresses is nonunique – it can be positive or negative depending on the side you view it from. • Calculate surface stress the same way you do traction, but correct the sign using the Mohr convention. Planes of differing Orientations • The concept of stress is further complicated by the orientation of the planes that it acts on. • Do not associate stress components with vector components that define things like force. Stress combines the effect of force and area which are constantly changing according to the orientation of the surface. • For a force (W) acting perpendicular on an inclined plane, the surface stress equates to: E’ = W/A’ = Wcos(")/A where A’ = A/ cos(") • It is common to find a force acting at some angle to the inclined plane. The normal and shear components of the force can be determined by F’n = Wcos(") and F’s = Wsin(") where " is the orientation of the plane. These are known as the force transformation equations. • The normal and shear stresses on an oriented plane can then be determined by combining the equations above resulting in: !'n = !ncos2(") and !’s = !nsin(")cos(") 2-D State of Stress at a Point • The stress ellipse represents the state of stress at a point because it represents the surface stresses acting on all possible orientations of a plane through that point. • You can describe the shape of an ellipse by determining the magnitude of the major and minor axes (the radii). These are two surface stresses that are called the principal stresses (!1 and !3). • !1 #!3 • Together the principal stresses act on the principal planes and parallel to the principal axes. • Each surface stress has a normal and shear component and they are labeled according to surface in which they act and the coordinate to which it is parallel. For example EPS116 Chapter 7 Summary 2011 1 Stephen Ferencz & Andrew Trautz Terminology for States of Stress: Hydrostatic Pressure - simply put, "ˆ1 = "ˆ 2 = "ˆ 3 = p . All principle stresses are compressive and equal. ! !xxleftAx + !xxrightAx + !zxtopAz + !zxbottomAz = 0 • • The sum of the moments of the forces also must be zero. !xz = -!zx by definition. This means that for a two dimensional system, three out of four stress components are independent (!xx, !zz, and !xz). 3-D State of Stress at a Point • The three-dimensional state of stress at a point is essentially the same as that explained for the 2-D case above. There are only two main differences from that described already. • There is an additional principal stress, !2, such that !1# !2# !3. • There are a total of six independent stress components (out of nine total). The normal stresses are unique while the shear stresses are equal but opposite: !xz = -!zx, !xy = -!yx, and !yz = -!zy The Mohr Diagram • The relationship between plane orientation and the values of normal/shear stress is difficult to determine using the stress ellipses. Instead it is much more convenient to use Mohr diagrams. • The horizontal axis contains the possible values for the normal stresses while the vertical axis contains the values for the shear stresses. • The Mohr circle completely represents the state of stress at a point in terms of the normal and shear components. Furthermore, !s = r*sin(2") = (!1 - !3)* sin(2")/2 Example of a Mohr Circle. The figure shows how different parts of the circle are calculated. • • • • • • • The principal stresses, !1 and !3, are the points of intersection of the Mohr circle with the !n axis. ! If you know the normal and shear stresses on two perpendicular planes, it is possible to plot the Mohr circle. With the circle, the surface stresses can be determined for any other orientation. Angles are doubled when converted from physical space to Mohr diagrams. Angles are measured counterclockwise from the major principal stress. There are two points on the Mohr circle with the same normal and shear components, but act on differently oriented planes. The maximum shear stress is located at the top of the Mohr circle. Scalar Invariants – the magnitude of a state of stress is characterized by its invariants. Mean normal stress (center of Mohr circle): = (!1 + !3)/2 Maximum shear stress (radius of Mohr circle): r = (!1 - !3)/2 Equations of the Mohr circle – the normal and shear stresses can easily be calculated for any orientation. !n = + r*cos(2") = (!1 + !3)/2 + (!1 - !3) *cos(2")/2 Uniaxial Stress1) compression: "ˆ1 > "ˆ 2 = "ˆ 3 = 0 , the only stress applied is a compressive stress in one direction 2) tension: 0 = "ˆ1 = "ˆ 2 < "ˆ , the only ! stress applied is a tensile stress in 1 direction. ! Axial Compression - A uniaxial compression of magnitude ("ˆ1 # "ˆ 3 ) !"#! added to a state of hydrostatic stress ("ˆ 2 = "ˆ 3 ). ! Axial Extension - "ˆ1 = "ˆ 2 > "ˆ 3 > 0 , A uniaxial tension of magnitude ("ˆ1 # "ˆ 3 ) is added to a hydrostatic stress ("ˆ1 = "ˆ 2 ) $!! ! Triaxial Stress - "ˆ1 > "ˆ!2 > "ˆ 3 , the principle stresses are all ! unequal and can be either positive or negative. The stresses!plot on the Mohr diagram as three separate circles. Pure shear stress - "ˆ1 = #"ˆ 3 and "ˆ 2 = 0 , the maximum and minimum shear principal stresses are equal but opposite, the intermediate principle stress is zero. Also the!normal stress ! on planes of maximum shear stress is zero. Deviatoric stress – The deviatoric normal stress on a plane, "(Dev )n , is found by subtracting the mean normal stress component, "n , from any normal stress component $!The mean normal ! stress can be given by either: "ˆ + "ˆ 1) ! "n = 1 3 2 2) " = "xx + "zz ! "n • each point represents a different plane orientation. ! • !xx means that the surface stress is acting on the x plane in the x direction (normal component). !xz similarly shows that it is acting on the x face but in the z direction (shear component). A principal plane is any plane in which the shear stresses are zero. The normal stresses that are acting on this plane are therefore the principal stresses. As mentioned earlier Newton’s second law must apply in this case. For example the forces parallel to the x-axis must sum to zero: n 2 The deviatoric shear stresses remain ! unchanged, so the Mohr circle remains the same ! diameter and merely shifts. For the deviatoric stress in two dimensions, the center of the Mohr circle is shifted to the origin of the graph. EPS116 Chapter 7 Summary 2011 Stephen Ferencz & Andrew Trautz 2 The Stress-Component Matrix Differential Stress – The differential stress is simply the difference between the maximum and minimum principle stresses, "(Dif ) = "ˆ1 # "ˆ 3 $! ! Effective stress – The effective normal (Eff ) %!is found by !stress on a plane , " n subtracting the pore fluid pressure in the rock, p f , from any normal stress component.! " n . The shear stresses for the ! stress are unchanged so the effective Mohr circle does not change diameter. ! The!effective stress is a result of shifting the Mohr circle to the left by a value equal to the pore fluid pressure: " n (Eff ) # "n $ p f $!! ! Mohr Diagram for 3 Dimensional Stress ! Three-dimensional stress is plotted on a Mohr diagram as three Mohr circles. Each circle is a graph of the surface stress components on sets of planes that are parallel to one of the principle axes. All three principle stresses are plotted as points on the " n !axis, and each point is common to two of the Mohr circles. ! The stress at a point ! !is called the stress tensor. In two dimensions the stress tensor is represented by a 2X2 matrix composed of four scalar components, and for three dimensions it is represented by a 3x3 matrix composed of nine scalar components. ! !ˆ 0 0 $ # 1 & 0 &! Ex. # 0 !ˆ 2 # & #" 0 0 !ˆ 3 &% ! For both 2x2 and 3x3 matrices the normal stress components plot on the diagonal of the matrix, which is referred to as the “principle diagonal,” and the shear stress components are plotted off the principle diagonal. Each row of the component matrix contains the three components of one of the surface stresses. For example, if you consider the first row of a matrix, [! 11, ! 12 , ! 13 ] %!you have the normal stress of the coordinate surface points in a negative direction There is a good image on page 183 of the text, Figure 7.14 In order to resolve the ambiguity of shear stress sign convention in the Morh circle in two dimensions we follow this simple convention: The two dimensional diagram of the stress components must be constructed so that there is a clockwise sense of rotation from the positive coordinate axis parallel to the largest normal stress component, toward the positive coordinate axis parallel to the smallest normal stress component (Twin and Moore, 188) References & Resources Twiss Moores. Structural Geology-second edition. 2007.151-191 http://en.wikipedia.org/wiki/Mohr’s_circle http://en.wikipedia.org/wiki/Stress and the two shear stresses that act on the coordinate plane perpendicular to the x1 ! axis. The Stress Tensor The components of surface stresses on all planes must lie inside the largest Mohr circles and outside the two smaller circles as depicted by the shaded area in the above diagram. With the mean normal stress being defined by: !n = ! xx + ! yy + ! zz !ˆ1 + !ˆ 2 + !ˆ 3 = 3 3 A tensor is defined as a mathematical quantity that can be used to describe the physical state or physical properties of a material. It is important to understand that in geology stress tensors have a different sign convention than there traction counterparts. For normal stresses, compressive stresses are positive and tensile stresses are negative just the same as the Mohr circle. However, for shear stresses the signs can differ from the Mohr circle components. Positive and negative tensor convention for shear forces is: 1) Positive if the shear traction component on the negative side of the coordinate surface points in a positive coordinate direction 2) Negative if the shear traction component on the negative side EPS116 Chapter 7 Summary 2011 Stephen Ferencz & Andrew Trautz 3 The concept of stress is important in understanding both the brittle and ductile deformation of rock. Stresses can be visualized using plane geometries, Mohr circle diagrams, and tensors. These methods can be used separately or in conjunction to explain how geologic structures are formed. composed of two tractions that point in opposite directions. • Keep the remaining bullets. Planes of Differing Orientations Edit sub-title. Change to Stress Across Planes of Different Orientations Remove first and second bullet. Add in: • • Force An influence that causes an object to move. It is a vector quantity and are classified into two types, internal and external forces. Internal forces determine the material properties and external forces produce motion and deformation that are preserved which then allow geo-scientist to study. The two types of external forces are body forces and surface forces. Body forces only act on the particle of mass regardless to its surrounding, such us gravity. Surface forces is a result from an action of a body on another body on a shared surface. In this chapter, we will focus on surface forces. Traction • • • Because surface stress comes in a pair, if we only know traction on one surface, we automatically know the traction on another surface which together gives us the stress. Traction and stress have a different sign convection system. This is because stress is It is important for structural geologists to know the surface stress on any plane of any orientation. This will allow us to determine which plane(s) is/are mostly stressed and thus will become the fracture plane. Although force and stress are similar, they are very different in a sense that stress takes area into account while force has nothing associated with area. Keep the remaining bullets. 2-D State of Stress at a Point Replace first, second, third and forth bullet by: • A stress ellipse is composed when surface stresses on all planes of all possible orientations through a point are plotted because the ends of all the arrows will trace out the ellipse and the arrows themselves are the radii. • The shape of the stress ellipse can be described by the magnitude of principal stresses which are the major and minor axes. No edits. Surface Stress Keep first, second and third bullet. Add after third bullet Add after the second bullet: • Principal stresses (σ1 and σ3). are defined to be the maximum and minimum of the surface stresses acting on any plane through the point with σ1≥ σ3. Principal stresses are always perpendicular to each other. They act on the principal planes and are parallel to the principal axes. • Keep the remaining bullets. 3-D State of Stress at a Point • With σ1 being the maximum principal stress and σ3 being the minimum principal stress, σ2 is called the intermediate principal stress. All three principal stresses are perpendicular to each other. • Instead of a stress ellipse, in 3-D we have a stress ellipsoid. The Mohr Diagram Edit the first bullet: It is easier to understand and more convenient to use Mohr diagrams than stress ellipses. Add in: • It is important to distinguish the Mohr diagram from a diagram of physical space; they are not the same. Leave the second and third bullet, as well as the Mohr Diagram figure. Edit the fourth bullet: • The principal stresses, σ1 and σ3, are the points of intersection of the Mohr circle with the σn axis. At these points, σs = 0. Remove the fifth bullet. Leave the sixth and seventh bullet. Edit the eighth bullet: • The maximum shear stress at the top and bottom of the Mohr circle. Edit the ninth bullet: • Scalar invariants are values that remain the same for any set of components (σxx, σxz), (σzz, σzx) that define the same stress. Include the remaining equations in the ninth bullet. Leave the tenth bullet. • Terminology for States of Stress Add to hydrostatic pressure definition: • No shear stress present. The Mohr diagram reduces to a point on the σn axis. EPS116 Chapter Summary 2013 1 Frances-Julianna Leiva and Wingyee Lee Add to uniaxial stress definition: In this case, the Mohr circle is tangent to the σs plane. Leave axial compression, axial extension, triaxial stress, and pure shear. Edit definition for deviatoric stress: • Deviatoric stress is found by subtracting the mean normal stress component from each of the normal stress components. Include the equations and second paragraph in the definition for deviatoric stress. Leave the definitions for differential stress and effective stress. • Mohr Diagram for 3-Dimensional Stress Leave this section alone. The Stress-Component Matrix Replace figure with: The Stress Tensor Add: • Stress is a second rank tensor with 9 components in three dimensional space. • Since σ12=σ21, σ13=σ31, σ23=σ32, we say that tensor is symmetric, leaving only 6 independent components. References & Resources Twiss and Moores. Structural Geology, 2nd ed. 2007. 151-191. EPS116 Chapter Summary 2013 Frances-Julianna Leiva and Wingyee Lee 2