Formulae Handbook
advertisement

Formulae
Handbook
Jan Braun
VCC!"
maxon academy
nL
ML
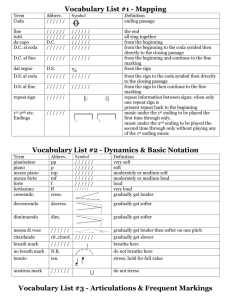
Selection process
Step 1
System
Overview
Ambient
conditions
Power
Communicaton
)
v(t), F(t
Ge a r
Motor
oller
Contr
Load
Start
drive selection
Step 2
Load
Overview, system analysis,
preselection of controller & sensor
Chap. A.1
Motion of the load
Chap. A.2
No
Mechanical
transformation?
Step 3
Drive
Step 4
Gearhead
Step 5 + 6
Motor type
Winding
Step 7
Sensor
Controller
When performing a system analysis!" #$%" &'(#" (#%)" *(" #+" ,%(-'*.%" #$%" ,'*/%" 0(" 0" 1$+2%" *3" *#("
%3/*'+34%3#5"6$%"+.7%-#*/%"*("#+"+.#0*3"03"overview"+8"#$%"(9(#%4!"#+",%#%'4*3%"#$%"#$%+'%#*-02"
8%0(*.*2*#9"+8"0"(+2:#*+3"03,"#+";%#"0")*-#:'%"+8"#$%".+:3,0'9"-+3,*#*+3("03,"'%(#'*-#*+3(5"See chapter
A.1: Overview, system analysis
6$%";+02"+8"<=+#*+3"+8"#$%"2+0,<"*("#+",%&3%"#$%">%9"'%?*'%4%3#("'%;0',*3;"8+'-%("@#+'?:%(A"03,"
/%2+-*#*%(" @()%%,(" +8" '+#0#*+3A5" B+1" 2+3;" 4:(#" #$%9" .%" 0))2*%,C" D$0#" *(" #$%" '%?:*'%," -+3#'+2"
0--:'0-9C"See chapter A.2: Motion of the load
6$%"4%-$03*-02",'*/%",%(*;3"-03".%"(>*))%,"*8"#$%"2+0,"*(",'*/%3",*'%-#29"03,"#$%",'*/%"(9(#%4",+%("
3+#"*3-2:,%"0"mechanical transformation.
Yes
Mechanical drives"#'03(8+'4"4%-$03*-02")+1%'"*3#+"4%-$03*-02")+1%'5"E+'"#$%"(%2%-#*+3"+8"#$%"
,'*/%"#$%"2+0,">%9",0#0"0'%"-+3/%'#%,"#+"#$%"+:#):#"+8"#$%"4+#+'"+'";%0'($08#5"See chapter A.3:
Mechanical drives.
Mechanical drive design
Chap. A.3
No
Use of
gearhead?
Yes
Gearhead selection
Chap. 3.4
6$%"(#%)"8+'"#$%"gearhead selection"-03".%"(>*))%,"*8"3+"@40F+3A";%0'$%0,"*(":(%,5"G%0'$%0,("0'%"
#9)*-0229":(%,"1$%3%/%'"$*;$"#+'?:%("0'%"'%?:*'%,"0#"2+1"()%%,(5
6$%"):')+(%"+8"#$*("(#%)"*("#+",%#%'4*3%"*8"03,"1$*-$"maxon gearhead"-03".%":(%,5"6$%">%9",0#0"
8+'" #$%" 4+#+'" (%2%-#*+3" -03" #$%3" .%" -02-:20#%," 8'+4" #$%" ;%0'$%0," '%,:-#*+3" 03," %8&-*%3-95" See
chapter 3.4: maxon gearhead
Motor type selection
Chap. 6.5
H3" #$%" .0(*(" +8" #$%" #+'?:%" 03," ()%%," '%?:*'%4%3#(!" #$%" 3%F#" (#%)" *(" #+" (%2%-#" (:*#0.2%" types of
motors5"6$%":(%8:2"2*8%!"-+44:#0#*+3"03,".%0'*3;"(9(#%4("02(+"$0/%"#+".%"-+3(*,%'%,5"See chapter
6.5: Motor selection
Winding selection
Chap. 6.5
6$%"selection of the winding"*("40,%"+3"#$%".0(*("+8"0"-+4)0'*(+3"+8"#$%"0))2*%,"4+#+'"/+2#0;%"
1*#$"#$%"()%%,"03,"0"-+4)0'*(+3"+8"#$%"0/0*20.2%"-:''%3#"1*#$"#$%"#+'?:%"'%?:*'%4%3#(5"See chapter
6.5: Motor selection
Verification of controller & sensor
Chap. A.3
6$%"):')+(%"+8"#$%"20(#"(#%)"*("#$%"!"#$%&'($)*+),+(-"+&)*(#).."#+'*/+0"*0)#1+0("1%22"0("0"/%'*&-0#*+3"
#$0#"#$%"-+3#'+22%'"03,"(%3(+'")'%(%2%-#%,"*3"#$%"(*#:0#*+3"03029(*("@I#%)"JA"0'%"-+4)0#*.2%"1*#$"#$%"
(%2%-#%,"4+#+'5"2""+&-'3("#+4567+8"#$%&'($)*+),+&)*(#).."#+'*/+0"*0)#
Drive selected
Foreword
This Formulae Handbook lists the most important formulae in relation to all components of
!"#$%&'(#$)*)!#+,$-!$+./#)$0)#$12$.$314$5".&!$!".!$)0661&!)$70'5/$)#8#5!'19$12$!"#$51&&#5!$%&'(#,$
Numerous illustrations and the clear descriptions of the symbols on the respective page help the
reader to understand the formulae.
Roughly speaking, it is a collection of the most important formulae from the maxon catalog, as
4#88$.)$2&1+$!"#$:11/$;<"#$)#8#5!'19$12$"'=">6&#5')'19$+'5&1%&'(#);?$60:8')"#%$:*$+.@19$.5.%#+*,
<"#$'9'!'.!'(#$21&$4&'!'9=$!"')$A1&+08.#$B.9%:11/$4.)$!"#$:11/$;<"#$)#8#5!'19$12$"'=">6&#5')'19$
+'5&1%&'(#);$:*$C&,$D&)$E.2.%#&?$4"'5"$519!.'9)$#@!#9)'(#$/914>"14$2&1+$!"#$)055#))$)!1&*$12$
FG>*#.&)$12$+.@19$CH$%&'(#)$4'!"$814$614#&$I:#814$.66&1@,$FGG$JK,$<"#$5188#5!'19$')$'9!#9%#%$
for engineers, professors, lecturers and students, as a perfect supplement to the above mentioned
book.
Thank you
A'&)!8*$ -$ 4108%$ 8'/#$ !1$ !".9/$ C&,$ D&)$ E.2.%#&?$ 4"1$ #9510&.=#%$ +#$ !1$ !.5/8#$ !"')$ :11/,$ <"#$
6&12#))'19.8$8.*10!$.9%$'880)!&.!'19)$4#&#$%19#$:*$L.!&'5'.$M.:&'#8$.9%$N#9'$O9%#&".8%#9,$D&)$
E.2.%#&?$ N.&:.&.$ P5"806?$ O9Q.$ P5"R!S?$ L.!&'/$ M91)?$ P!#2.9$ N.0+.99?$ T.&!'9$ UR#==?$ T'5".#8$
N.0+=.&!9#&?$T.&!'9$J'9%8'9?$V#9)$P5"08S#?$O8:#&!$N05"#8'?$T.&!'9$W%#&+.!!$.9%$J.8!#&$P5"+'%$
have read the manuscript and have given valuable suggestions for improvements. I also received
#@!#9)'(#$.9%$&#.%*$)0661&!$2&1+$+.9*$1!"#&$6#168#$.!$+.@19$+1!1&$.=$'9$&#)619)#$!1$+*$70#)!'19)$
.9%$&#70#)!)$21&$.))')!.95#,
P6#5'.8$ !".9/)$ =1$ !1$ P0).9$ N#5"!'=#&?$ L.08$ J'88'.+)?$ U1:'9$ L"'8'6)?$ O9!"19*$ T.*&$ .9%$ T.&/$
H.)#*$4"1$"#86#%$'+6&1(#$!"#$!&.9)8.!'19$2&1+$M#&+.9$'9!1$X9=8')",
P.5")#89?$P6&'9=$YGZY$
V.9$N&.09
E*'(#"K,*#*+3"LMJL
N"LMJL!"40F+3"0-0,%49!"I0-$(%23"
6$*("1+'>"*(")'+#%-#%,".9"-+)9'*;$#5"O22"'*;$#("'%(%'/%,!"*3-2:,*3;".:#"3+#"2*4*#%,"#+"#$%"'*;$#("#+"
#'03(20#*+3"*3#+"8+'%*;3"203;:0;%(!"'%)'+,:-#*+3!"(#+'0;%"+3"%2%-#'+3*-"4%,*0!"'%)'*3#*3;"03,"):.2*-"
)'%(%3#0#*+35"6$%":(%"+8")'+)'*%#0'9"304%(!"-+44+3"304%("%#-5"*3"#$*("1+'>",+%("3+#"4%03"#$0#"
#$%(%"304%("0'%"3+#")'+#%-#%,"1*#$*3"#$%"4%03*3;"+8"#'0,%40'>"2015"O22"#$%"*38+'40#*+3"*3"#$*("1+'>!"
*3-2:,*3;".:#"3+#"2*4*#%,"#+"3:4%'*-02",0#0!"0))2*-0#*+3(!"?:03#*#0#*/%",0#0"%#-5"0("1%22"0("0,/*-%"03,"
'%-+44%3,0#*+3("$0(".%%3"-0'%8:229"'%(%0'-$%,!"02#$+:;$"#$%"0--:'0-9"+8"(:-$"*38+'40#*+3"03,"
#$%"#+#02"0.(%3-%"+8"#9)+;'0)$*-02"%''+'("-033+#".%";:0'03#%%,5"6$%"0--:'0-9"+8"#$%"*38+'40#*+3"
)'+/*,%,"4:(#".%"/%'*&%,".9"#$%":(%'"*3"%0-$"*3,*/*,:02"-0(%5"6$%"0:#$+'!"#$%"):.2*($%'"03,P+'"#$%*'"
0;%3#("409"3+#".%"$%2,"2*0.2%"8+'".+,*29"*37:'9"+'")%-:3*0'9"+'")'+)%'#9",040;%5
Content
A.
O5J"
O5L"
O5S"
1.
J5J"
J5L"
J5S"
"
2.
L5J"
L5L"
L5S"
L5W"
3.
S5J"
S5L"
S5S"
S5W"
4.
W5J"
5.
Z5J"
Z5L"
Z5S"
Z5W"
6.
Q5J"
Q5L"
Q5S"
Q5W"
Q5Z"
7.
8.
U5J"
U5L"
U5S"
9.
V5J"
V5L"
V5S"
V5W"
10.
JM5J"
JM5L"
11.
Drive selection
H/%'/*%1!"(9(#%4"03029(*("
=+#*+3"+8"#$%"2+0,"
T%'*&-0#*+3"+8"-+3#'+22%'"03,"(%3(+'"
Mass, force, torque
E+'-%("*3";%3%'02"
6+'?:%("*3";%3%'02"
=+4%3#("+8"*3%'#*0"+8"/0'*+:(".+,*%("1*#$"'%8%'%3-%"
#+"#$%")'*3-*)02"0F%("#$'+:;$"#$%"-%3#%'"+8";'0/*#9"I"
Kinematics"
X*3%0'"%?:0#*+3("+8"4+#*+3"
Y+#0'9"%?:0#*+3("+8"4+#*+3""
69)*-02"2*3%0'"4+#*+3")'+&2%("
69)*-02"'+#0'9"4+#*+3")'+&2%("
Mechanical drives"
=%-$03*-02"#'03(8+'40#*+3"
6'03(8+'40#*+3"+8"4%-$03*-02",'*/%(!"2*3%0'"
6'03(8+'40#*+3"+8"4%-$03*-02",'*/%(!"'+#0#*+3"
40F+3";%0'"
Bearing"
[+4)0'*(+3"+8"-$0'0-#%'*(#*-("+8"(*3#%'%,"(2%%/%".%0'*3;("03,".022".%0'*3;("
Electrical principles"
\'*3-*)2%("+8"]["@]*'%-#"[:''%3#A"
K2%-#'*-02"'%(*(#*/%"-*'-:*#("
\'*3-*)2%("+8"O["@O2#%'30#*3;"[:''%3#A"
I*4)2%"&2#%'("
maxon motors"
G%3%'02"
\+1%'"-+3(*,%'0#*+3"+8"#$%"]["4+#+'^"*3";%3%'02"
=+#+'"-+3(#03#("03,",*0;'04("
O--%2%'0#*+3"
=+#+'"(%2%-#*+3"
maxon sensor"
maxon controller"
H)%'0#*3;"?:0,'03#("
I%2%-#*+3"+8")+1%'"(:))29"
I*_%"+8"#$%"4+#+'"-$+>%"1*#$"\D="-+3#'+22%'("
Thermal behavior"
`0(*-("
[+3#*3:+:("+)%'0#*+3""
[9-2*-"03,"*3#%'4*##%3#"+)%'0#*+3"@-+3#*3:+:(29"'%)%0#%,A"
I$+'#a#%'4"+)%'0#*+3"
Tables"
40F+3"[+3/%'(*+3"60.2%("
69)*-02"-+%8&-*%3#("+8"8'*-#*+3"8+'"'+22*3;!"(#0#*-"03,">*3%#*-"8'*-#*+3"
Symbol list for the Formulae Handbook
5
6
Q
R
U
9
V
JJ
JL
JW
JW
JZ
JQ
JU
LJ
LJ
LL
LZ
LQ
LR
LR
LV
LV
SJ
SS
SW
SZ
SZ
SU
SV
WJ
WL
WS
WZ
WZ
WZ
WQ
WR
WR
WV
ZJ
ZL
ZS
ZS
ZW
56
A.
A.1
Drive selection
Overview, system analysis
`%8+'%"#$%"0-#:02"(%2%-#*+3")'+-%((".%;*3(!"0"-+3(*,%'0#*+3"1*#$"#$%",'*/%"(9(#%4"*3"*#("%3#*'%#9"
*("3%%,%,5"6$%")+((*.2%"'03;%"+8"/0'*0#*+3("+8"#$%">%9")0'04%#%'("4:(#"02(+".%",%#%'4*3%,5"O("
0"':2%!"022"+8"#$%(%"0()%-#("0'%"-2+(%29"*3#%'2*3>%,5"6$%",%(-'*)#*+3(".%2+1"0'%"*3#%3,%,"#+"$%2)"
-20'*89"#$%(%")+*3#("03,"%(#0.2*($"0"8'04%1+'>"8+'"#$%"8:'#$%'"(%2%-#*+3")'+-%((5
Mechanical design
JS
mR
d1
J1
p
J2
d2
b("#$%"*3#%3,%,"4+#*+3"2*3%0'"+'"0"'+#0'9C"
D$0#",'*/%"@()*3,2%!"#++#$%,".%2#!"%#-5A"+'"1$0#"
-+4.*30#*+3"+8",'*/%("0'%";+*3;"#+".%":(%,"
#+"0-$*%/%"#$%",%(*'%,"4+#*+3C"b("*#"0",*'%-#"
,'*/%C
9"%*"+(-"+&)*(#).+&)*&"3(
Set value
Output
Actuator
Feedback
Sensor
Measurement
D$0#"/0'*0.2%("0'%"#+".%"-+3#'+22%,^"-:''%3#!"
()%%,!")+(*#*+3C"D*#$"1$0#"0--:'0-9C"b("03"
+)%3a2++)"-+3#'+2"(9(#%4"(:8&-*%3#C"B+1"*("
#$%"-+3#'+22%,"/0'*0.2%"4%0(:'%,C"D$%'%",+"
#$%"-+4403,("03,"(%#"/02:%("-+4%"8'+4C"6$%"
03(1%'("#+"#$%(%"?:%(#*+3("1*22"'%(:2#"*3"0")'%a
(%2%-#*+3"+8")+((*.2%"-+3#'+22%'("03,"(%3(+'(!"
*5%5"8+'"(%2%-#*+3"(#%)"R"@(%%")0;%"LA5
Verify the power components
b("(:8&-*%3#"%2%-#'*-")+1%'"0/0*20.2%"#+",'*/%"
#$%"2+0,":3,%'"022"+)%'0#*3;"-+3,*#*+3("03,"#+"
-+4)%3(0#%"8+'"#$%"%F)%-#%,"2+((%("*3"#$%",'*/%"
#'0*3C"D$0#"0'%"#$%"40F*4:4"/+2#0;%"03,"
-:''%3#"#$0#"1*22".%"0/0*20.2%C
Determine the boundary conditions
d
l
O'%"#$%'%"'%(#'*-#*+3("+3"(*_%C"b3"1$0#"%3/*a
'+34%3#"@#%4)%'0#:'%!"0#4+()$%'%"%#-5A"*("#$%"
,'*/%"'%?:*'%,"#+"+)%'0#%C"b("-+4)2*03-%"1*#$"
)0'#*-:20'"()%-*&-0#*+3("+'"?:02*#9"(#03,0',("
'%?:*'%,C"D$0#"*("#$%"()%-*&%,":(%8:2"2*8%C
Cost considerations
[+(#"*("02109("0">%9"-+3(*,%'0#*+35"B+1"-03"
#$%",'*/%".%",%(*;3%,"0("%-+3+4*-0229"0(")+(a
(*.2%"03,"(#*22"4%%#"#$%"'%?:*'%4%3#("'%;0',*3;"
)%'8+'403-%"03,":(%8:2"2*8%C
E+'",%#0*2%,"*38+'40#*+3!"'%8%'"#+"#$%".++>"<6$%"(%2%-#*+3"+8"$*;$a)'%-*(*+3"4*-'+,'*/%(<!"-$0)#%'"S5
Q"
40F+3"E+'4:20%"B03,.++>
A.2
Motion of the load
b3"#$%"(#%)"8+'",%#%'4*3*3;"#$%"load requirements!"#$%"4+#*+3("#+".%"%F%-:#%,"4:(#".%",%&3%,5"
b#"*("*4)+'#03#"#+"(%2%-#"0))'+)'*0#%"4+#*+3")'+&2%("03,"#+"-+3(*,%'"1$*-$"+)%'0#*3;"#*4%("0'%"#+"
.%"%F)%-#%,5
Operating points
Velocity v
Speed n
1
2
3
4
1
Time t
Velocity v
Speed n
2
3
1
E+'",%#%'4*3*3;"#$%"0((+-*0#%,"operating
points"@/02:%")0*'("+8"#+'?:%"03,"()%%,"+8"
'+#0#*+3"+'"+8"8+'-%"03,"/%2+-*#9A!"#$%"'%()%-a
#*/%"#+#02"8+'-%("03,"#+'?:%("0'%"*4)+'#03#5"6+"
#$*("%3,!"022"0-#*3;"8+'-%("03,"#+'?:%("$0/%"#+"
.%",%#%'4*3%,5"6$%(%"*3"#:'3",%)%3,"+3"#$%"
4+4%3#("+8"*3%'#*0"03,"#$%"0--%2%'0#*+3"/02:%(5
E+'"#$%"):')+(%"+8"40>*3;"0"(%2%-#*+3!"-02-:a
20#*3;"#$%(%"/02:%("1*#$"03"0--:'0-9"+8"0))'+F5"
JMc"*("(:8&-*%3#5
4
Force F, torque M
Mechanical play of the drive
Twisting angle °
0.4
0.2
0
-1500
-1000
-500
0
-0.2
500
1000 1500
Test torque mNm
E:'#$%'4+'%"#$%"?:%(#*+3"+8"#$%"40F*4:4"
)%'4*((*.2%"mechanical play of the drive"$0("
#+".%",%#%'4*3%,5
-0.4
Key data
Force F
Torque M
Fmax/Mmax
6$%"key data"1$*-$"-0'0-#%'*_%"#$%"2+0,"-03"
&30229".%"-02-:20#%,"8'+4"#$%"+)%'0#*3;")+*3#(5
6$%9"0'%"*4)+'#03#"8+'"(%2%-#*3;"#$%",'*/%5
FRMS/MRMS
∆tmax
∆ttot
Time t
E+'",%#0*2%,"*38+'40#*+3!"'%8%'"#+"#$%".++>"<6$%"(%2%-#*+3"+8"$*;$a)'%-*(*+3"4*-'+,'*/%(<!"-$0)#%'"W5
40F+3"E+'4:20%"B03,.++>"
R
456+ 8"#$%&'($)*+),+&)*(#).."#+'*/+0"*0)#
6$%"controller and sensor"/%'*&-0#*+3"*3/+2/%("-$%->*3;"1$%#$%'"#$%")'%(%2%-#*+3"40,%",:'*3;"
#$%"(9(#%4"03029(*("@(%2%-#*+3"(#%)"J!"(%%")0;%"LA"0'%"-+4)0#*.2%"1*#$"#$%"4+#+'"8+:3,5"]%#0*2%,"
%F04*30#*+3"+8"#$%"-+3&;:'0#*+3"+8"#$%"-+3#'+2"-*'-:*#"022+1("#+"40>%",%&3*#*/%",%-*(*+3("'%;0'a
,*3;"#$%"(:*#0.2%"-+4)+3%3#("@-+3#'+22%'"03,"(%3(+'A5
Motion controller
b3"$*;$%'a2%/%2",'*/%"(9(#%4(!"#$%"4+#*+3"
-+3#'+22%'"*("#$%"-%3#'02"%2%4%3#5"b#"*("1$%'%"022"
#$%"#$'%0,("-+4%"#+;%#$%'5"6$:(!"#$%"-+3#'+22%'"
4:(#"(0#*(89"0"1*,%"'03;%"+8"'%?:*'%4%3#(5"
6$%"-+3#'+22%'"4:(#
– .%"0.2%"#+"-+3#'+2"#$%"403*):20#%,"/0'*0.2%"
" 1*#$"(:8&-*%3#"0--:'0-9"*3"0"'%0(+30.2%"
" 04+:3#"+8"#*4%
– .%"0.2%"#+")'+-%(("#$%"*38+'40#*+3")'+/*,%,"
" .9"#$%"(%3(+'
– :3,%'(#03,"#$%"(%#"/02:%("03,"-+4403,("+8"
" #$%"$*;$%'a2%/%2"(9(#%4
– )'+/*,%"#$%"'%?:*'%,"%2%-#'*-")+1%'
– .%"(:*#%,"#+"#$%"4+#+'"#9)%"
" @.':($%,"+'".':($2%((A"03,"#$%"-+44:#0#*+3
Sensor
6$%"(%3(+'"@%3-+,%'!"]["#0-$+"+'"'%(+2/%'A"
4:(#".%"0))'+)'*0#%"8+'"#$%"-+3#'+2"#0(>"03,"
-+4)29"1*#$"#$%"+#$%'"-+4)+3%3#(5"
O,,*#*+30229!"#$%"8+22+1*3;"8:'#$%'"(%2%-#*+3"
-'*#%'*0"0))295
6$%"(%3(+'"$0("#+
– .%"4+:3#0.2%"+3"#$%"4+#+'"
" 0--+',*3;"#+"#$%"40F+3"4+,:20'"(9(#%45
– 4%0(:'%"#$%"-+''%-#"-+3#'+2"/0'*0.2%"
" @()%%,!")+(*#*+3!",*'%-#*+3"+8"'+#0#*+3A"
" 1*#$"(:8&-*%3#"'%(+2:#*+35
" Y:2%"+8"#$:4.^"6$%"'%(+2:#*+3"+8"#$%"(%3(+'"
" ($+:2,".%"0#"2%0(#"8+:'"#*4%("$*;$%'"#$03"#$%"
" ()%-*&%,"0--:'0-9"+8"#$%"-+3#'+2"/0'*0.2%5
E+'",%#0*2%,"*38+'40#*+3!"'%8%'"#+"#$%".++>"<6$%"(%2%-#*+3"+8"$*;$a)'%-*(*+3"4*-'+,'*/%(<!"-$0)#%'"V5
U"
40F+3"E+'4:20%"B03,.++>
1.
Mass, force, torque
1.1
Forces in general
6$%"8+'-%"'%?:*'%,"#+"0--%2%'0#%"0"40(("+8"J">;".9"J"4P("*3"J"("$0("#$%":3*#">;"d"4P(L!"1*#$"#$%"
()%-*02":3*#"304%"e%1#+3"@eA5
Typical component forces in a drive system
E+'-%"8+'"0--%2%'0#*+3"f"
40(("F"0--%2%'0#*+3"
[F] = kg · m/sY = kgm/sY = N
Fa
m
Fa = m · a = m · !v
!t
G'0/*#0#*+3
@;'0/*#0#*+302"0--%2%'0#*+3
FM = m · g
=$[$\,]Z$+^)L$[$\,]Z$_^/=$`$ZG$_^/=A
m
FG
E+'-%("+3"#$%"*3-2*3%,")203%^"
]+13$*22a(2+)%"8+'-%"03,"3+'402"
8+'-%
FH
!
FG
FN
FR
FH = FM$a$)'9 b
FN = FM$a$51) b
E'*-#*+3"8+'-%
I2*,*3;"8'*-#*+3
FR$[$c$a$AN
I)'*3;"8+'-%!"-+4)'%((*+3"03,"
%F#%3(*+3"()'*3;(
FP$ [$/$a$d8
[+4)'%((*/%"8+'-%
Fp$ [$6$a$O
FN
FP
p
Symbol
O"
F"
Fa"
F M"
F H"
FN"
"
F p"
FR"
F P"
Name
['+(("(%-#*+3"
E+'-%"
O--%2%'0#*+3"8+'-%"
D%*;$#"+8"0".+,9"
]+13$*22a(2+)%"8+'-%"
e+'402"8+'-%"
@8+'-%")%')%3,*-:20'"#+"#$%")203%A"
[+4)'%((*/%"8+'-%"
E'*-#*+3"8+'-%"
I)'*3;"8+'-%"
40F+3"E+'4:20%"B03,.++>"
SI
4L
e
e
e
e
e
e
e
e
Symbol
a"
g"
k"
m"
p"
b"
d8"
d!"
d("
c"
Name
SI
O--%2%'0#*+3"
4P(L
G'0/*#0#*+302"0--%2%'0#*+3"
4P(L
I)'*3;"-+3(#03#"
eP4
=0(("
>;
\'%((:'%"@J"L.$[$J"N/mL"f"JMaZ barA"
\0
O3;2%"+8"#$%"*3-2*3%,")203%"
g
]*()20-%4%3#"
4
]:'0#*+3""
(
T%2+-*#9"-$03;%"
4P(
[+%8&-*%3#"+8"8'*-#*+3"@(%%"#0.2%"-$0)#5"JM5LA
V
Calculating the total load force consisting of component forces
F1
Fx
F2
FL
F1
FL
Fx
F2
O,,*#*+3"+8"8+'-%("0-#*3;"*3"#$%"(04%"
,*'%-#*+3
FL = FJ + FL + ...+ Fe
O,,*#*+3"+8"8+'-%("0-#*3;"*3"+))+(*#%"
,*'%-#*+3(
FL = FJ$f$AL$f$,,,f$Ae
O,,*#*+3"+8")%')%3,*-:20'"8+'-%(
FL = F1 + F2
F1
FL
Symbol
Name
F L"
X+0,"8+'-%"@+:#):#A"
FJ / FL / Fx" \0'#*02"8+'-%("
JM"
F2
2
2
SI
e
e
40F+3"E+'4:20%"B03,.++>
1.2
Torques in general
6$%"#+'?:%"*("0"4%0(:'%"+8"#$%"'+#0#*+302"%88%-#"#$0#"0"8+'-%"%F%'#("+3"0"'+#0#*3;"(9(#%45"b#")209("
#$%"(04%"'+2%"8+'"'+#0#*+3"#$0#"#$%"8+'-%")209("8+'"2*3%0'"4+#*+35
6$%"%?:0#*+3("02109("0))29"8+'"0",%&3%,"0F*("+8"'+#0#*+35
General
r
F
6+'?:%"f"8+'-%"F"2%/%'"0'4
gTh$[$_$a$+$[$_+
M
T$[$A$a$&
Typical component torques in drive systems
6+'?:%"8+'"0--%2%'0#*+3"+8"4+4%3#("+8"*3%'#*0
6+'?:%"f"4+4%3#"+8"*3%'#*0"F"03;:20'"0--%2%'0#*+3
@E+'"*38+'40#*+3"+3"-02-:20#*3;"4+4%3#("+8"*3%'#*0!"
(%%"#$%"3%F#")0;%(A
r
M! "#$#%#!#"#$#% &(
&'
"
#%
M! = J ·
·
30 #$
E'*-#*+3"+8".022".%0'*3;"03,"
MR = µ · FKL · rKL
(*3#%'%,"(2%%/%".%0'*3;"@(*4)2*&%,A
6+'?:%"+8"()*'02"+'"2%;"()'*3;(
TP = km h$di
Calculating the load torque consisting of component torques
M1
Mx
M2
ML
M1
ML
Symbol
F"
FEk"
V"
T"
T L"
TR"
TP"
Tb"
TJ ^TL ^Tx"
k m"
Mx
M2
O,,*#*+3"+8"#+'?:%("0-#*3;"*3"
(04%",*'%-#*+3
TL$[$TJ$j$TL$j$,,,j$Te
O,,*#*+3"+8"#+'?:%("0-#*3;"*3"
+))+(*#%",*'%-#*+3(
TL$[$TJ$f$TL$f$,,,f$Te
Name
E+'-%"
`%0'*3;"2+0,!"0F*02"P"'0,*02"
=+4%3#"+8"*3%'#*0"
6+'?:%"
X+0,"#+'?:%"
E'*-#*+3"#+'?:%"
6+'?:%!"()*'02"()'*3;"
6+'?:%"8+'"0--%2%'0#*+3"
\0'#*02"#+'?:%("
6+'(*+3"-+%8&-*%3#"@()'*3;"-+3(#03#A"
40F+3"E+'4:20%"B03,.++>"
SI
e
e
>;4L
e4
e4
e4
e4
e4
e4
e4
Symbol
r"
rEk"
b"
d!"
di"
dl"
c"
Name
SI
Y0,*:("
4
=%03",*04%#%'".%0'*3;"
4
O3;:20'"0--%2%'0#*+3"
'0,P(L
]:'0#*+3""
(
O3;2%"+8"'+#0#*+3"
'0,
O3;:20'"/%2+-*#9"-$03;%"
'0,P(
[+%8&-*%3#"+8"8'*-#*+3"@(%%"#0.2%"-$0)#5"JM5LA
Symbol
d9"
Name
I)%%,"-$03;%"
maxon
')4
JJ
1.3
Moments of inertia of various bodies with reference
to the principal axes through the center of gravity S
Body type
Illustration
Mass, moments of inertia
Circular cylinder, disc
!"#"$"%"&"%"r 2"%"'
Jx = 1 %"!"%"r 2
2
Jy = Jz = 1 %"!"%"(3r 2 + ' 2)
12
Hollow cylinder
!"#"$"%"&"%"(ra2"'"(i2) %")""
1
2
Jx"#""""%"!"%"(r
+ ri2)
a
2
2
Jy = Jz = 14 %"!"%""(a2 + ri2 + )3
Circular cone
m = 31 !"$"!"%"!"r 2 !"&
3
Jx = 10 !"#"!"r 2
3
Jy = Jz = 80 !"#"!"(4r 2 + h2)
Truncated circular cone
1
2
!"#""""$"%"$"&"$"(r
+ r2r1+ r12) $"'
2
3
r25 !"r15
3
Jx"#""""""$"!"$
10
r23 !"r13
Circular torus
m = 2!"#"$ 2"#"r 2 #"%""
Jx = Jy = 81 #"&"#"(4%2 + 5r 2)
Jz = 41 #"&"#"(4%2 + 3r 2)
Sphere
m = 43 !"#"!"$"!"r 3
Jx = Jy = Jz = 25 !"%"!"r 2
Symbol
Vx"
"
Vy"
"
V S"
"
R"
JL"
Name
=+4%3#"+8"*3%'#*0
1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("x"
=+4%3#"+8"*3%'#*0
1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("y"
=+4%3#"+8"*3%'#*0
1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("S"
Y0,*:("-*'-:20'"#+':("0'+:3,"Sa0F*("
SI Symbol
h"
>;4L m"
r"
>;4L ra"
ri"
>;4L rJ"
4 r L"
m"
Name
B%*;$#"
=0(("
Y0,*:("
H:#%'"'0,*:("
b33%'"'0,*:("
Y0,*:("J"
Y0,*:("L"
]%3(*#9"
SI
4
>;
4
4
4
4
4
>;"P"4S
40F+3"E+'4:20%"B03,.++>
Body type
Illustration
Mass, moments of inertia
4
!"#"""""$"%"$"&"$"(
ra3"'"(i3)
3
Hollow sphere
ra "'"(i
2
Jx = Jy = Jz"#""""$"!"$"
3
3
5
5
5
ra "'"(i
m = !"#"$"#"%"#"&"
1
Jx = 12 #"'# (%2 + &2)
Cuboid
Thin rod
y
m !"#"$"%"$"&
1
2
Jx = Jz"!""""""$"'"$"&
12
Square pyramid
1
!"#""""$"%"$"&"$"'"$"("
3
1
2
Jx"#""""""$"!"$"(&
+ ' 2)
20
1
2
Jy"#""""""$"!"$"('
+ 3 ( 2)
20
4
Arbitrary rotation body
m = !"#"$"#"%x1 f 2(x) #"&'"""
x2
1
Jx = 2 #"!"#"$"#"%x1 f 4(x) #"&'
Steiner's theorem
=+4%3#"+8"*3%'#*0"1*#$"'%8%'a
%3-%"#+"0")0'022%2"0F*("+8"'+#0a
tion x 0#"0",*(#03-%"+8 rs"#+"0F*("s
#$'+:;$"#$%"-%3#%'"+8";'0/*#9"I5
Jx = m !"r s2 + Js
x2
Symbol
O"
V s"
"
Vx"
"
Vy"
"
V S"
"
a"
b"
Name
['+(("(%-#*+3"
=+4%3#"+8"*3%'#*0"1*#$"'%8%'%3-%"
#+"0F*("s"#$'+:;$"-%3#%'"+8";'0/*#9$P"
=+4%3#"+8"*3%'#*0"
1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("x"
=+4%3#"+8"*3%'#*0"
1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("y"
=+4%3#"+8"*3%'#*0"
1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("S"
X%3;#$"+8"(*,%"a
X%3;#$"+8"(*,%"b
40F+3"E+'4:20%"B03,.++>"
SI Symbol
4L c"
h"
>;4L l"
m"
>;4L ra"
ri"
>;4L rs"
m"
>;4L xJ"
m x L"
m
Name
SI
X%3;#$"+8"(*,%"c
m
B%*;$#"
4
X%3;#$"
4
=0(("
>;
H:#%'"'0,*:("
4
b33%'"'0,*:("
4
]*(#03-%"+8"0F*("s 8'+4"-%3#%'"+8";'0/*#9"P m
]%3(*#9"
>;P4S
\+*3#"J"+3"#$%"@>0F*("
4
\+*3#"L"+3"#$%"xa0F*("
4
JS
2.
2.1
Kinematics
Linear equations of motion
Uniform movement
Velocity v
!s
!t
v = !#
!"
T%2+-*#9
($[$d)$^$d!"f"-+3(#03#
g(h$[$+^)
v
d)$[$($a$d!
Time t
Constant acceleration from a standing start
O--%2%'0#*+3
.$[$d($^$d!"f"-+3(#03#
g.h$[$+^)L
Velocity v
d($[$.$h$d!
1
2
!"#$####%#&#%#!t
2
!v
d($[$=$h$d!
!s
!t
Time t
E'%%"8022
h = 1 · g · !t 2
2
Constant acceleration from initial speed
Velocity v
!s
!t
Symbol
a"
g"
h"
d)"
vend
vend = vstart + a h$d!
vstart
1 '#)#!& 2
!"#$#%"&'(&#)#!&#*####
2
Time t
Name
O--%2%'0#*+3"
G'0/*#0#*+302"0--%2%'0#*+3"
]'+)"$%*;$#"
]*(#03-%"
SI
4P(L
4P(L
4
4
Symbol
!?$d!"
(?$d("
vend
vstart"
Name
6*4%!",:'0#*+3"
T%2+-*#9!"/%2+-*#9"-$03;%"
T%2+-*#9"08#%'"0--%2%'0#*+3"
T%2+-*#9".%8+'%"0--%2%'0#*+3"
SI
(
4P(
4P(
4P(
Remarks:
– 6$%"($0,%,"0'%0("'%)'%(%3#"#$%",*(#03-%"d)"#'0/%2%,",:'*3;"#*4%")%'*+,"d!5
JW"
40F+3"E+'4:20%"B03,.++>
2.2
Rotary equations of motion
General
1m
1rad
2π rad ! 360°
1m
1m !
1 rad =
57.2958°
1m
[+3/%'(*+3" .%#1%%3" '0,*03"
360°
1 rad ! 2!
03,",%;'%%(
@6$%" :3*#" rad" *(" 8'%?:%3#29"
SQMg"!"Ln$&.%
+4*##%,5A
[+3/%'(*+3".%#1%%3"
03;:20'"/%2+-*#9"03,"()%%,"
of rotation
&
30
!"#""""""$"%""""""%"#""""" $"!
30
&
O3;:20'"/%2+-*#9
l$[$di$^$d!$[$-+3(#03#
[l] = rad/s
!"#
Uniform movement
Angular velocity$#,
Speed n
!"
#,n
!t
Time t
$%
$t
$%
!"# 30
&"#""""""""'
($t
I)%%,"+8"'+#0#*+3
30
n = SM"^$n$o$di$^$d!$[$-+3(#5 &"#""""""""'
(
[n] = J/min f"')4
$%
$t
$%
$t
Constant acceleration from a standing start
Angular velocity#$,
Speed n
!$, !n
!"
!t
O--%2%'0#*+3
b$[$dl$^$d!$[$-+3(#03#
[b] = J/sL = rad/sL
Time t
Constant acceleration from initial speed
Angular velocity$#,
Speed n
Symbol
!?$d!"
b"
di"
l?$dl"
lend
#start, nstart
!t
Time t
Name
6*4%!",:'0#*+3"
O3;:20'"0--%2%'0#*+3"
O3;2%"+8"'+#0#*+3"
O3;:20'"/%2+-*#9"@-$03;%A"
O3;:20'"/%2+-*#9"08#%'"0--%2%'0#*+3""
2
11
2
!)#$####&#%#&#!t
!)#$####&#%#&#!t
22
11 (
(
!)#$####&######&#!'#&#!t
!)#$####&######&#!'#&#!t
22 30
30
!
"#"!
"$"%"&"'t
!end
"#"!start
"$"%"&"'t
end
start
30
30
nnend =
"$""""""&"%"&"'t
((
= nnstart
"$""""""&"%"&"'t
end
start
11
2
2
')
"&"'*"$""""&"%"&"'t
') #"!
#"!start
"&"'*"$""""&"%"&"'t
22
start
((
11 ((
')
"&"'*"$""""&""""""&"'n&'t
') #""""""&"+
#""""""&"+
start "&"'*"$""""&""""""&"'n&'t
30
22 30
30 start
30
#end, nend
!"
!"#$#%#&#!t
!"#$#%#&#!t
30
30
!'#$######&#%#&#!t
(
!'#$######&#%#&#!t
(
SI
(
'0,P(L
'0,
'0,P(
'0,P(
Symbol
lstart"
Name
O3;:20'"/%2+-*#9".%8+'%"0--%2%'0#*+3"
Symbol
9?$d9"
nend
nstart"
Name
I)%%,"+8"'+#0#*+3"@-$03;%A"
I)%%,"08#%'"0--%2%'0#*+3"
I)%%,".%8+'%"0--%2%'0#*+3"
SI
'0,P(
maxon
')4
')4
')4
Remarks:
– 6$%"($0,%,"0'%0("'%)'%(%3#"#$%"03;2%"+8"'+#0#*+3"di"#'0/%2%,",:'*3;"#*4%")%'*+,"d!5
– O3;2%"+8"'+#0#*+3"di = L$a$n$a"e:4.%'"+8"'%/+2:#*+3("f"SQMg"h"e:4.%'"+8"'%/+2:#*+3(
40F+3"E+'4:20%"B03,.++>"
JZ
;56+
<=3$&'.+.$*"'#+>)($)*+3#)%."0
:#)%."
General
Symmetrical
6'0/%2"+/%'"2+3;",*(#03-%"0#"
2*4*#%,"/%2+-*#9
Suitability
vmax
vmax
∆s
Diagram
∆ta
∆tb
∆ttot
∆s
∆tc
∆ta
∆tb
∆ttot
∆ta
Task:
6'0/%2"0",*(#03-%"+8"d)
in time d!tot
!"
!# %'%!#c
!##$#%& a
2
vmax
amax = !#
a
6'0/%2"0",*(#03-%"+8"d) at a
2*4*#%,"/%2+-*#9"+8"vmax
!# $%$!#
!"
!##&# = v + a 2 c
max
vmax
amax = !#
a
vmax =
vmax =
!&
(!""#"$%$!"a)
amax =
!&
(!""#"$%$!"a) · !"a
!""#" = v!$ %&!"a
max
vmax
amax =
!"a
%&!"a
!""#" = a !$
· !"a
max
6'0/%2"0",*(#03-%"+8"d) at a
2*4*#%,"0--%2%'0#*+3"+8"amax
vmax = amax · !"a
!%a#&#!%c
&#!%b · vmax
[+4)2%#%"4+#*+3"*3"#$%"#*4%" !"#$
2
v
d!tot"0#"40F*4:4"/%2+-*#9"vmax
amax#$ max
!%a
[+4)2%#%"4+#*+3"*3"#$%"#*4%"
d!tot"0#"40F*4:4"0--%2%'0#*+3"
amax
!"#$#(!%%&%#'#!%a) · vmax
vmax
amax = !%
a
!#$%$&max · (!""'"$($!"a) · !"a
vmax = amax · !"a
=+#*+3"0#"2*4*#%,"/%2+-*#9"vmax
03,"2*4*#%,"0--%2%'0#*+3"amax
Symbol
amax"
vmax"
d)"
JQ"
Name
=0F*4:4"0--%2%'0#*+3""
=0F*4:4"/%2+-*#9"
]*(#03-%"
SI
4P(L
4P(
4
Symbol
d!a"
d!b"
d!c"
d!tot"
Name
6*4%"0"
6*4%"."
6*4%"-"
6+#02"#*4%"
SI
(
(
(
(
40F+3"E+'4:20%"B03,.++>
3/3 Trapezoidal
Triangle
H)#*4*_%,"8+'"4*3*4:4")+1%'"
@0#";*/%3"d)"03,"d!A^"
=+(#"0,/03#0;%+:("8'+4"0"#$%'402"
)+*3#"+8"/*%1
H)#*4*_%,"8+'"2*4*#%,"0--%2%'0#*+3"+'"8+'-%
@0#";*/%3"d)"03,"d!A5"
H)#*4*_%,"8+'"4*3*4:4"#*4%"'%?:*'%4%3#"
@0#";*/%3"d)"03,"amaxA5
vmax
vmax
∆s
∆s
∆ttot
∆ttot
vmax = 1.5 · !$
!""#"
!$
vmax = 2 · !"
"#"
amax = 4.5 · !$2
!" "#"
amax = 4 · !$2
!" "#"
!""#" = 1.5 · v!$
max
v 2max
amax = 2 ·
!$
!""#" = 3 · !$ !"#$%#"· !$
2
amax
amax
!$
!""#" = 2 · v
max
v 2max
amax =
!$
!$
!""#" = 2 · a
max
vmax = % · !$%· amax !"&$'"·" !$%("amax
2
2
!&$% · !""#"$· vmax
3
v
amax$%$3 · max
!""#"
1
!"#$ 2 · !%%&% · vmax
vmax
amax = 2 ·
!%%&%
!"#$ 2 · amax · !t 2tot !"#$&&"· amax !t 2tot
9
vmax = 31 · amax · !t tot !"#$%%"· amax !t tot
1
!$%&%%%%%· amax · !" 2"#"
4
vmax = 1 · amax · !""#"
2
v 2max
!$%&%2 · a
max
vmax
!""#" = 3 · a
max
v 2max
!"#$ a
max
Symbol
amax"
vmax"
Name
=0F*4:4"0--%2%'0#*+3""
=0F*4:4"/%2+-*#9"
40F+3"E+'4:20%"B03,.++>"
vmax =
!$%· amax
v
!%%&%#$#2 · amax
max
SI Symbol
4P(L d)"
4P( d!tot"
Name
]*(#03-%"
6+#02"#*4%"
SI
4
(
JR
;5?+
<=3$&'.+#)('#=+>)($)*+3#)%."0
:#)%."
General
Symmetrical
X+3;"'+#0#*+3"0#"2*4*#%,"()%%,"
of rotation
Suitability
nmax
nmax
∆!
Diagram
∆!
∆tb
∆ttot
∆ta
∆tc
∆ta
∆tb
∆ttot
∆ta
Task:
6'0/%2"03"03;2%"+8"di
in time d!tot
6'0/%2"03"03;2%"+8"di
0#"0"2*4*#%,"()%%,"+8"nmax
!&
!" + !"c
!""#"$% a
2
"'
!max =
"# + "#c
"##$#%& a
(%"#a
2
30 !$ !" + !"
!""#" = % · n + a 2 c
max
# n
"max = 30 · !tmax
a
30
nmax = ' ·
!max =
!&
30
·
' (!""#"$%$!"a)
"'
("##$#%&%"#a) · "#a
30 !$
!""#" = % · n + !"a
max
$ n
!max = 30 · max
"#a
"##$# =
6'0/%2"03"03;2%"+8"di at a
2*4*#%,"03;:20'"0--%2%'0#*+3"
of bmax
[+4)2%#%"4+#*+3"*3"#$%"#*4%"
d!tot"0#"40F*4:4"()%%,"nmax
nmax =
"%
+ "#a
!max · "#a
nmax = 30
$ · !max · "#a
&
!$ #%#!$
!"#= 30 · n'()#· a 2 c + !$b
$ nmax
!max = 30 · "#
a
(
!"#$##############
·#(!%%&%#'#!%a)
30 · nmax
$ nmax
!max = 30 · "#
a
!"#$#%max#&#(!''('#)#!'a)#&#!'a
[+4)2%#%"4+#*+3"*3"#$%"
time d!tot"0#"40F*4:4"03;:20'"
0--%2%'0#*+3"bmax
nmax = 30
$ · !max · "#a
=+#*+3"0#"2*4*#%,"()%%,"
of nmax"03,"2*4*#%,"03;:20'"
0--%2%'0#*+3"+8"bmax
Symbol
bmax"
d!a"
d!b"
d!c"
d!tot"
JU"
Name
=0F*4:4"03;:20'"0--%2%'0#*+3"
6*4%"0"
6*4%"."
6*4%"-"
6+#02"#*4%"
SI
'0,P(L
(
(
(
(
Symbol
di"
Name
O3;2%"+8"'+#0#*+3"
Symbol
nmax"
Name
=0F*4:4"()%%,"*3"2+0,"-9-2%"
SI
'0,
maxon
')4
40F+3"E+'4:20%"B03,.++>
3/3 Trapezoidal
Triangle
H)#*4*_%,"8+'"4*3*4:4")+1%'"
@0#";*/%3"di"03,"d!A^"
=+(#"0,/03#0;%+:("8'+4"0"#$%'402"
)+*3#"+8"/*%1
H)#*4*_%,"8+'"2*4*#%,"03;:20'"0--%2%'0#*+3"
+'"#+'?:%"@0#";*/%3"di"03,"d!A"03,"
8+'"4*3*4:4"#*4%"'%?:*'%4%3#"
@0#";*/%3"di"03,"bmaxA5
nmax
nmax
∆!
∆!
∆ttot
∆ttot
30 !"
nmax = 2 · # · !t
tot
30 !$
nmax = 1.5 · % · !"
"#"
!max = 4.5 ·
"#
!max = 4 · "t 2
tot
"#
"t 2tot
30 !$
!""#" = 1.5 · % · n
max
30 !%
!""#"$= 2 · & · n
max
n2max $2
!max = "# · 2
30
$2 n2max
·
302 "#
"%
"%
3
· ! !"#$%#"· !
"##$# =
2
max
max
30
1
nmax =
· · !"#· $max !"#$%&"· !"#· $max
2 %
' · !" · n
!$%& 2 · 30
"#"
max
3
% nmax
!max = 3 · 30 · "#
#$#
30
nmax = % !"#· $max
!"#= 1 · & · !$$%$#· nmax
2 30
% n
!max = 2 · 30 · "#max
#$#
!"#$ 2 · %max#· !t 2tot#!"#$%%"· %&'(#!t 2tot
9
1
nmax = · 30 · !max · "##$# !"#$%&"· !max "##$#
3 %
30 !"
nmax = 2 · # · !t
tot
"#
!max = 4 · "t 2
tot
!"#$###1 · %max#· !t 2tot
4
nmax = 12 · 30
! · "max · #$$%$
30 n 2
"#$= % · ! max
max
% nmax
"##$# = 2 · 30 · !
max
!max = 2 ·
Symbol
bmax"
d!tot"
di"
Name
=0F*4:4"03;:20'"0--%2%'0#*+3"
6+#02"#*4%"
O3;2%"+8"'+#0#*+3"
40F+3"E+'4:20%"B03,.++>"
"$$%$ = 2 ·
SI Symbol
'0,P(L nmax"
(
'0,
"#
!max
Name
=0F*4:4"()%%,"*3"2+0,"-9-2%"
maxon
')4
JV
Notes
3.
3.1
Mechanical drives
Mechanical transformation
@.'00$%&'($)*
Output power/transformation, general
Linear
Spindle
Output power, linear motion
Rack and pinion
Lmech$[$($o$A
Ball screw
Conveyor belt
Transformation, general
Trapezoidal screw
Crane
Rover
Eccentric drive
[J]$[$+^)$o$_
Crankshaft
Rotation
Pmech,L =
Pmech,in
!
vL # FL =
"in # Min
!
Output power, rotary motion
Gearhead
Belt
Spur gearhed
Toothed belt
Planetary gearhead
Chain drive
[J] = saJ$o$_+
!
Pmech"#"$"%"&"#"""""""%"'"%"&
30
Transformation, general
Bevel gear
Special design
Worm gear
Cyclo gear
Wolfrom gear
Harmonic Drive®
Pmech,L =
Pmech,in
!
"L # M L =
"in # Min
!
Designations in the formulae
– 6$%"2+0,a(*,%"/0'*0.2%("0#"#$%"+:#):#"0'%"*,%3#*&%,".9"#$%"*3,%F"L5
– 6$%"*3):#a(*,%"/0'*0.2%("@:(:0229"#$%"4+#+'A"0'%"*,%3#*&%,".9"#$%"*3,%F"in5
Symbol
F"
F L"
T"
T L"
Tin"
Lmech"
Lmech,in"
Lmech,L"
v"
Name
E+'-%"
X+0,"8+'-%"@+:#):#A"
6+'?:%"
X+0,"#+'?:%"
b3):#"#+'?:%"
=%-$03*-02")+1%'"
=%-$03*-02"*3):#")+1%'"
=%-$03*-02"+:#):#")+1%'"
T%2+-*#9"
40F+3"E+'4:20%"B03,.++>"
SI
e
e
e4
e4
e4
D
D
D
4P(
Symbol
v L"
p$"
l"
l L"
lin"
Name
X+0,"/%2+-*#9"
K8&-*%3-9
O3;:20'"/%2+-*#9"
O3;:20'"/%2+-*#9"2+0,"
O3;:20'"/%2+-*#9"*3):#"
Symbol
n"
Name
I)%%,"+8"'+#0#*+3"
SI
4P(
'0,P(
'0,P(
'0,P(
maxon
')4
LJ
3.2
Transformation of mechanical drives, linear
Spindle drive
60
I)%%,"+8"'+#0#*+3 nin = p · vL
JS
p
6+'?:%
p FL
·
2! "
Min =
O,,*#*+302"#+'?:%"8+'"-+3(#03#"0--%2%'0#*+3"
@()%%,"-$03;%"d9in ,:'*3;")%'*+,"d!aA
,
-#in
mL&)&+S p 2
&&&*&&&&&&&&*&&&&&&&&&
M"#$%&'&&&(in&)&(S&)&&&&&&&&&&&&&&&&*&&&&&&
30 -.a
4, 2
!
\209!"
)+(*#*+3"%''+'
2!
"#in$%$"&L ! p
Belt drive/conveyor belt/crane
J1
mB
d1
J2
d2
I)%%,"+8"'+#0#*+3 nin =
6+'?:%
Min =
J1
M&%'( = J&% + J1 +
\209!"
)+(*#*+3"%''+'
LL"
d1 FL
!
2 !
O,,*#*+302"#+'?:%"8+'"-+3(#03#"0--%2%'0#*+3"
@()%%,"-$03;%"d9in ,:'*3;")%'*+,$d!aA
d1
Symbol
F L"
Vin"
"
V P"
VX"
VJ"
VL"
Tin"
T'9?b"
d X"
dJ"
d L"
mN"
60 vL
!
! d1
Name
X+0,"8+'-%"@+:#):#A"
=+4%3#"+8"*3%'#*0!"*3):#
@4+#+'!"%3-+,%'!".'0>%A""
=+4%3#"+8"*3%'#*0!"()*3,2%"
=+4%3#"+8"*3%'#*0!",%i%-#+'"):22%9"X"
=+4%3#"+8"*3%'#*0!",'*/*3;"%3,"
=+4%3#"+8"*3%'#*0!",%i%-#+'"):22%9"L"
b3):#"#+'?:%"
6+'?:%"8+'"0--%2%'0#*+3"
]*04%#%'!",%i%-#+'"):22%9"X
]*04%#%'!",'*/%"):22%9"
]*04%#%'!",%i%-#+'"):22%9"L"
=0((!".%2#"
J2 d12 JX d12 mL + mB d12
" #%&%
+
!
!
!
+
!
!
!
30 #$a
! d22 ! dX2
4
!"in#$#!%L ! 2
d1
SI Symbol
e m L"
mP"
>;4L p"
>;4L vL"
>;4L d)L"
>;4L d!a"
>;4L diin"
e4 q"
e4
m Symbol
4 nin"
4 d9in"
>;
Name
=0(("+8"#$%"2+0,"
=0((!"()*3,2%"
I)*3,2%"2%0,"@)*#-$A"
X+0,"/%2+-*#9"
=%-$03*-02")209!"+:#):#"
O--%2%'0#*+3"#*4%"
=%-$03*-02")209!"*3):#"
K8&-*%3-9
Name
b3):#"()%%,"
I)%%,"-$03;%!"*3):#"
SI
>;
>;
4
4P(
4
(
'0,
maxon
')4
')4
40F+3"E+'4:20%"B03,.++>
Rack-and-pinion drive
J P, z
60
I)%%,"+8"'+#0#*+3 nin = p !"z !"vL
p
mz
6+'?:%
Min =
p !"z FL
!
"
2!
O,,*#*+302"#+'?:%"8+'"-+3(#03#"0--%2%'0#*+3"
@()%%,"-$03;%"d9in ,:'*3;")%'*+,$d!aA
Min,! = Jin + JP +
# $&in
mL + mZ p2 !"z2
!
!
!
30 $%a
"
4# 2
\209!"
)+(*#*+3"%''+'
"#in = "$L !
2!
p !"z
Rover
I)%%,"+8"'+#0#*+3 nin =
JW
mF
d
6+'?:%
Min =
60 vL
!
! d
d FL
!
2 !
O,,*#*+302"#+'?:%"8+'"-+3(#03#"0--%2%'0#*+3
@()%%,"-$03;%"d9in ,:'*3;")%'*+,$d!aA
#%&%
"
m + mF d 2
M&%'( = J&% + JW + L
! 4 ! 30 ! #$
!
a
\209!"
)+(*#*+3"%''+'
Symbol
F L"
Vin"
"
VL"
V J"
"
Tin"
T'9?b"
d"
mF"
m L"
m Z"
p"
Name
X+0,"8+'-%"@+:#):#A"
=+4%3#"+8"*3%'#*0!"*3):#
@4+#+'!"%3-+,%'!".'0>%A""
=+4%3#"+8"*3%'#*0!")*3*+3"
=+4%3#"+8"*3%'#*0!
022"1$%%2("#+;%#$%'"
b3):#"#+'?:%"
6+'?:%"8+'"0--%2%'0#*+3"
]*04%#%'!",'*/%"1$%%2"
=0((!"'+/%'"
=0(("+8"#$%"2+0,"
=0((!";%0'"'0->"
\*#-$"
40F+3"E+'4:20%"B03,.++>"
!"in = !sL ! 2
d
SI Symbol
e v L"
S"
>;4L d)L"
>;4L d!a"
diin"
>;4L q"
e4
e4 Symbol
4 nin"
>; d9in"
>;
>;
4
Name
X+0,"/%2+-*#9"
e:4.%'"+8"#%%#$!")*3*+3
=%-$03*-02")209!"+:#):#"
O--%2%'0#*+3"#*4%"
=%-$03*-02")209!"*3):#"
K8&-*%3-9
Name
b3):#"()%%,"
I)%%,"-$03;%!"*3):#"
SI
4P(
4
(
'0,
maxon
')4
')4
LS
Eccentric drive
e
JE
I*3:(+*,02"/%2+-*#9"-:'/%"+8"#$%"2+0,"
@0((:4)#*+3^"-+3(#03#"4+#+'"()%%,"ninA
vL (t) = ! · nin · e · sin ! · nin · t
30
30
O3;2%a,%)%3,%3#")%'*+,*-"0--%2%'0#*+3"8+'-%"8+'"2+0,!"
)*(#+3("03,"'+,("@mLA
Fa#$!%#&#'a#(#)*+!#&#,L !
2
" !
!"e !"cos!
30 nin
O3;2%a,%)%3,%3#"#+'?:%(",:%"#+",*88%'%3#"2+0,"-+3,*#*+3(
TinJ$IiK$[$#$a$IALJ$a$)'9$i$j$AaJ$a$51)iK$
TinL$IiK$[$#$a$IALL$a$)'9$i$j$AaL$a$51)iK$
M$r$i$r$n
n$r$i$r$Ln
O/%'0;%"#+'?:%"2+0,
Min,RMS =
e
!
2 !"!
FL1 2 + Fa1 2 + FL2 2 + Fa2 2
O,,*#*+302"#+'?:%"8+'"0--%2%'0#*+3"+8"#$%"%--%3#'*-",*(@()%%,"-$03;%"d9in ,:'*3;")%'*+,$d!aA
M%$&'()((*%$(+(*E(((!(
Symbol
FLJ"
FLL"
Fa
Fa IiK"
"
FaJ"
FaL"
Vin"
"
VX"
T'9?UTP"
T'9?b"
TinJIiK"
LW"
Name
X+0,"8+'-%"J(#"$028"-9-2%"
X+0,"8+'-%"L3,"$028"-9-2%"
O--%2%'0#*+3"8+'-%"
\%'*+,*-"0--%2%'0#*+3"8+'-%"0("0"
8:3-#*+3"+8"#$%"03;2%"+8"'+#0#*+3"
O--%2%'0#*+3"8+'-%!"J(#PL3,"$028"-9-2%"
O--%2%'0#*+3"8+'-%!"J(#PL3,"$028"-9-2%"
=+4%3#"+8"*3%'#*0!"*3):#"
@4+#+'!"%3-+,%'!".'0>%A""
=+4%3#"+8"*3%'#*0!"%--%3#'*-",*(-"
Y=I"#+'?:%"
6+'?:%"8+'"0--%2%'0#*+3"
6+'?:%!"J(#"$028"-9-2%"
! "$%$
!
30 "#a
SI
e
e
e
Symbol
TinLIiK"
e"
m L"
vLI!K"
e t"
e d!a"
e i"
q"
>;4L
>;4L Symbol
e4 nin"
e4 d9in"
e4
Name
6+'?:%!"L3,"$028"-9-2%"
K--%3#'*-*#9"
=0(("+8"#$%"2+0,"
I*3:(+*,02"/%2+-*#9"-:'/%"+8"#$%"2+0,"
6*4%"
O--%2%'0#*+3"#*4%"
O3;2%"+8"'+#0#*+3"
K8&-*%3-9
Name
b3):#"()%%,"
I)%%,"-$03;%!"*3):#"
SI
e4
4
>;
4P(
(
(
'0,
maxon
')4
')4
40F+3"E+'4:20%"B03,.++>
3.3
Transformation of mechanical drives, rotation
Gearhead
iG
I)%%,"+8"'+#0#*+3
nin = nL · iM
6+'?:%
Min =
J1
J2
ML
iG · !
O,,*#*+302"#+'?:%"8+'"-+3(#03#"0--%2%'0#*+3"
@()%%,"-$03;%"d9in ,:'*3;")%'*+,$d!aA
M$#&'= J$#+ J1+
JL
JL + J2
% !#$#
% !#
·
· · $#
·
30 !"a = J$#)+ JG + iG2 · ( 30 !"a
iG2 · (
\209!")+(*#*+3"%''+'
diin$[$diL$o$'M
Y%,:-#*+3"'0#*+
)203%#0'9";%0'$%0,
iG =
I)%%,"+8"'+#0#*+3
nin = nL ·
6+'?:%
Min =
z 1+ z 3
z1
Belt drive
mR
d1
J1
J2
d2
d2
d1
d1 ML
·
d2 !
O,,*#*+302"#+'?:%"8+'"-+3(#03#"0--%2%'0#*+3"
@()%%,"-$03;%"d9in ,:'*3;")%'*+,$d!aA
2
M!"#$ = Jin + J1 +
\209!")+(*#*+3"%''+'
Symbol
V M"
"
Vin"
"
V L"
Vx"
VJ"
VL"
Tin"
T'9?b"
T L"
d x"
dJ"
d L"
Name
=+4%3#"+8"*3%'#*0!
;%0'$%0,"#'03(8+'4%,"
=+4%3#"+8"*3%'#*0!"*3):#
@4+#+'!"%3-+,%'!".'0>%A""
=+4%3#"+8"*3%'#*0!"2+0,"
=+4%3#"+8"*3%'#*0!",%i%-#+'"):22%9"X"
=+4%3#"+8"*3%'#*0!",'*/*3;"%3,"
=+4%3#"+8"*3%'#*0!"+:#):#"
b3):#"#+'?:%"
6+'?:%"8+'"0--%2%'0#*+3"
X+0,"#+'?:%"
]*04%#%'!",%i%-#+'"):22%9"X
]*04%#%'!",'*/%"):22%9"
]*04%#%'!"2+0,"):22%9"
40F+3"E+'4:20%"B03,.++>"
2
2
Jx d1
m · d1
JL + J2 d1
· 2 + 4R · %
· 2+
%
% dx
d2
&
'n
· 30 · 't in
a
!"in = !" L · d 2
d1
SI Symbol
i M"
>;4L mR"
SJ"
>;4L SS"
>;4L d!a"
>;4L diin"
>;4L diL"
>;4L q"
e4
e4 Symbol
e4 nin"
m nL"
4" d9in"
4
Name
Y%,:-#*+3"'0#*+!";%0'$%0,"@-0#02+;"/02:%A
=0((!".%2#"
e:4.%'"+8"#%%#$!"(:3"1$%%2
e:4.%'"+8"#%%#$!"*3#%'302";%0'"
O--%2%'0#*+3"#*4%"
=%-$03*-02")209!"*3):#"
=%-$03*-02")209!"+:#):#"
K8&-*%3-9
Name
b3):#"()%%,"
X+0,"()%%,"
I)%%,"-$03;%!"*3):#"
SI
>;
(
'0,
'0,
maxon
')4
')4
')4
LZ
3.4
maxon gear
A/"*($%&'($)*+0=0(">+,)#+>'B)*CD"'#-"'/0
Gearhead design type
GS
GP
KD
GP
Spur gearhead
Planetary gearhead
Koaxdrive
22
A
Diameter
in mm
Version
A
B
C
HD
HP
K
L
M
S
V
Z
Metal version
Version with enlarged internal gear
Ceramic version
Heavy Duty – for applications in oil
High power version
Plastic version
Low-cost version
Sterilizable version for medical application
Spindle drive with axial bearing
Reinforced version
Low backlash version
Operating ranges of gearheads
40F+3a;%0'$%0,("0'%",%(*;3%,"8+'"03"+)%'0#*3;"2*8%"+8"0#"2%0(#"JMMM"$+:'("0#"#$%";*/%3"40F*4:4"
-+3#*3:+:(" #+'?:%" 03," 40F*4:4" *3):#" ()%%," '0#*3;(5" H)%'0#*+3" .%2+1" #$%(%" 2*4*#(" 1*22"
(*;3*&-03#29"*3-'%0(%"+)%'0#*3;"2*8%5"b8"#$%"2*4*#("0'%"%F-%%,%,!"#$%":(%8:2"2*8%"+8"#$%";%0'$%0,"
409".%"'%,:-%,5
Load speed nL
nmax,L
Max. load speed
(determined by gearhead input speed)
nmax,L =
nmax,in
iG
nmax,in
nmax,L
Continuous operation Short-term operation
Load torque ML
MG,cont
Symbol
TM?519!"
"
TM?+.@"
"
i M"
LQ"
MG,max
Name
SI Symbol
nmax,in"
=0F5"-+3#*3:+:("#+'?:%!";%0'$%0,"
@-0#02+;"/02:%A"
e4 nmax,L"
b3#%'4*##%3#29")%'4*((*.2%"#+'?:%!"
;%0'$%0,"@-0#02+;"/02:%A"
e4
Y%,:-#*+3"'0#*+!";%0'$%0,"@-0#02+;"/02:%A
Name
=0F*4:4"*3):#"()%%,"
=0F*4:4"2+0,"()%%,"
maxon
')4
')4
40F+3"E+'4:20%"B03,.++>
4.
4.1
Bearing
Comparison of characteristics of sintered sleeve bearings and ball bearings
Sintered sleeve bearings
Ball bearings
r
Operating – [+3#*3:+:("+)%'0#*+3
modes
Speed
range
Radial /
axial load
–
"
"
–
""
–
"b,%02"0.+/%"0))'+F5"ZMM"')4"
@'03;%"8+'"$9,'+,9304*-"
2:.'*-0#*+3A
D*#$"()%-*02"40#%'*02")0*'*3;"03,
2:.'*-0#*+3"%/%3"0#"2+1%'"()%%,(
H329"(4022".%0'*3;"2+0,(
–
–
"
–
–
"
I:*#0.2%"8+'"022"#9)%("+8"+)%'0#*+3
K()%-*0229"8+'" (#0'#a(#+)" +)%'0#*+3(" 03,"
2+1a()%%,"0))2*-0#*+3(
j)"#+"0))'+F5"JM"MMM"')4
b3"()%-*02"-0(%(":)"#+"JMM"MMM"')4"
03,"$*;$%'
–
–
"
"
Additional – 69)*-02"*3"(4022".':($%,"]["4+#+'(" –
operating " :)"#+"0))'+F5"SM"44",*04%#%'"03," "
criteria
–
" *3"():'";%0'$%0,(
"
– e+#"(:*#0.2%"8+'"'+#0#*3;"2+0,
"
– e+#"(:*#0.2%"8+'"/0-::4"
" 0))2*-0#*+3("@+:#;0((*3;A
– e+#"(:*#0.2%"8+'"2+1"#%4)%'0#:'%("
" @k"aLMg[A
Bearing
– OF*02^"#9)*-0229"M5MZ"555"M5JZ"44
–
play
– Y0,*02^"#9)*-0229"M5MJW"44
"
–
@)",%&$"*(+ – M5MMJ"l"M5MJ"
–
of friction " @$9,'+,9304*-"2:.'*-0#*+3A
B*;$%'"2+0,(
\'%2+0,%,".022".%0'*3;(^
OF*02"2+0,*3;":)"#+"#$%"/02:%"+8"#$%"
)'%2+0,
69)*-02"*3"]["4+#+'("0.+/%"JM"44"
,*04%#%'"03,"*3")203%#0'9";%0'$%0,(
\'%2+0,%,".022".%0'*3;("+88%'"0"/%'9"
2+3;"2*8%"03,"(4++#$"+)%'0#*+3^
69)*-02"*3".':($2%(("]["4+#+'(
Lubrication
–
"
–
"
"
"
–
"
"
6%4)%'0#:'%"'03;%"8+'"(#03,0',"
2:.'*-0#*+3^"#9)*-0229"aLM"l"JMM"g[
I)%-*02"2:.'*-0#*+3")+((*.2%"8+'"/%'9"
$*;$"+'"/%'9"2+1"+)%'0#*3;"#%4)%'0#:'%(
I%02*3;")+((*.2%"@.:#"$*;$%'"8'*-#*+3!"
($+'#%'"2*8%"03,"2+1%'"()%%,"2*4*#A
Costs
K-+3+4*-02
B9,'+,9304*-"2:.'*-0#*+3"+329"0#"
$*;$"()%%,(
I$08#".%0'*3;"40#%'*02"/%'9"*4)+'#03#!"
)+'%"(*_%"+8"#$%"(*3#%'%,".%0'*3;"03,"
/*(-+(*#9"+8"#$%"2:.'*-03#"0#"+)%'0#*3;"
#%4)%'0#:'%"0'%"-'*#*-02
I)%-*02^"I*3#%'%,"*'+3".%0'*3;("1*#$"
-%'04*-"($08#"8+'"$*;$"'0,*02"2+0,("
03,"2+3;"+)%'0#*3;"2*8%
40F+3"E+'4:20%"B03,.++>"
–
"
–
"
–
"
OF*02^"#9)*-0229"M5MZ"l"M5JZ"44"
@3+"0F*02")209"*8")'%2+0,%,A
Y0,*02^"#9)*-0229"M5MLZ"44
M5MMJ"l"M5J
=+'%"%F)%3(*/%
LR
Notes
5.
5.1
Electrical principles
Principles of DC (Direct Current)
Electric power
\+1%'^
P = U · I = R · I2 =
j3*#^
[L]$ [$s$a$O$[sO
$
[$J$[$V^)
U2
R
\+1%'"2+((^
LV = R d I L
Power adjustment
P/Pmax
O#"RL = Ri"#$%"40F*4:4")+1%'"*(",'013"8'+4"0"/+2#0;%"(+:'-%5
1.0
Linear source
0.8
I
a
I
Ri
U0
0.6
Consumer load
Ukl
RL
0.4
b
0.2
0.0
0.01
0.1
1
10
100
RL/Ri
U2
I2 · R
Pmax = 4 · 0R = 4 i
i
Ohm's law
D$[$U$a$U
I=
R
U
R= I
I
+
A
V
U
R
_
Symbol
I"
L"
Lmax"
LV"
R"
Name
[:''%3#"
\+1%'"
=0F*4:4")+1%'"
\+1%'"2+((%("
K2%-#'*-02"'%(*(#03-%"
40F+3"E+'4:20%"B03,.++>"
SI
O
D
D
D
m
Symbol
Ri"
R L"
D"
D 0"
D kl"
Name
b33%'"'%(*(#03-%!"/+2#0;%"(+:'-%"
X+0,"'%(*(#03-%"
T+2#0;%"
I+:'-%"/+2#0;%"
6%'4*302"/+2#0;%"
SI
m
m
T
T
T
LV
Electrical time constant
100
%
63%
Uout 60
U 40
in
20
0
!el
0
2!el
t
3!el
4!el 5!el
6$%"%2%-#'*-02"#*4%"-+3(#03#" [:''%3#"-$03;%"1*#$"
,%(-'*.%("#$%"'%0-#*+3"#*4%"+8" *3,:-#*/%"2+0,
#$%"-:''%3#"1$%3"(1*#-$*3;" ! = L
el
R
+3"+'"+88"0"/+2#0;%5
T+2#0;%"-$03;%"1*#$"
[tel]$[$u$d$A$[$u$d$O)$^$s$[$) -0)0-*#*/%"2+0,
[tel]$[$B$^$u$[$s)$^$O$^$u$[$) !el = R · C
Pull-up / pull-down
+V
Ru
Pull-up:"@'%20#*/%29"$*;$a*4)%,03-%A"'%(*(#+'
– [+33%-#("(*;302"2*3%"1*#$"$*;$%'"/+2#0;%")+#%3#*02
– \:22("#$%"2*3%":)"#+"#$%"$*;$%'")+#%3#*02!"*8"3+"%F#%'302
" /+2#0;%"0-#*/%29"):22("#$%"2*3%"#+"0"2+1%'")+#%3#*02
Pull-up
Logic
Logic
Rd
Pull-down:"@'%20#*/%29"$*;$a*4)%,03-%A"'%(*(#+'
– [+33%-#("(*;302"2*3%"1*#$"2+1%'"/+2#0;%")+#%3#*02
– \:22("#$%"2*3%",+13"#+"#$%"2+1%'")+#%3#*02!"*8"3+"%F#%'302"
" /+2#0;%"0-#*/%29"):22("#$%"2*3%"#+"0"$*;$%'")+#%3#*02
Pull-down
Open-collector output
Open-collector output (OC):
+V
Ru
Iout
Open
Collector
Output
Collector
Logic
Base
Uout
Emitter
Symbol
H"
Iout"
L"
R"
Rd"
R u"
SM"
Name
[0)0-*#03-%"
H:#):#"-:''%3#"
b3,:-#03-%"
K2%-#'*-02"'%(*(#03-%"
\:22a,+13"'%(*(#03-%"
\:22a:)"'%(*(#03-%"
–
"
–
"
"
H:#):#"+8"03"*3#%;'0#%,"-*'-:*#"1*#$"0".*)+20'"#'03(*(#+'"
1*#$"03"+)%3"-+22%-#+'"+:#):#5
j(:0229"#$%"+:#):#("0'%":(%,"*3"-+4.*30#*+3"1*#$"
0"):22a:)"'%(*(#+'"1$*-$"'0*(%("#$%"+:#):#"/+2#0;%"#+"0
$*;$%'")+#%3#*02"*3"#$%"*30-#*/%"(#0#%5
Dout$[$js$v$@Iout · RuA
Hall sensors":(:0229"$0/%"03"+)%3a-+22%-#+'"+:#):#"
1*#$+:#"):22a:)"'%(*(#+'5"6$%'%8+'%"*#"*("*3#%;'0#%,"*3#+"#$%"
40F+3"-+3#'+22%'(5
SI
E
O
B
m
m
m
Symbol
t"
Din"
Dout"
+V"
tel"
Name
6*4%"
b3):#"/+2#0;%"
H:#):#"/+2#0;%"
I:))29"/+2#0;%"
K2%-#'*-02"#*4%"-+3(#03#"
SI
(
T
T
T
(
40F+3"E+'4:20%"B03,.++>
5.2
Electrical resistive circuits
Series resistor circuits
I
+
D$[$DJ$j$DL +...
R1
U1
b"f"-+3(#03#
R = RJ + RL + ...
U1
U
R2
U2
U2
=
R1
R2
–
Parallel resistor circuits
I = IJ + IL +...
I
+
I1
U
R1
1 1
1
= + + ...
R R1 R 2
I2
j"f"-+3(#03#
R2
R=
I1 R2
=
I2 R1
–
Symbol
I"
IJ, IL"
R"
R1 · R2
R1 + R2
Name
6+#02"-:''%3#"
\0'#*02"-:''%3#("
K?:*/02%3#"'%(*(#03-%"
40F+3"E+'4:20%"B03,.++>"
SI
O
O
m
Symbol
RJ, RL"
D"
DJ?$DL"
Name
\0'#*02"'%(*(#03-%("
6+#02"/+2#0;%"
\0'#*02"/+2#0;%("
SI
m
T
T
SJ
Voltage divider, no-load
R2
I
+
U2 = U
R1
U1
R1 + R2
U1 R1
=
U2 R2
U
R2
U2
I=
–
U2
U
=
R1 + R2
R2
Voltage divider, under load
+
+
I
I
+
R1 R1
R1 R1
IL
U
IL
U
IR2 IR2
UL UL
R2 R2
–
RL RL
–
Rx Rx
–
Rx
Rx + R1
RL · R2
UL = U
+
–
Rx =
RL + R2
R2
IL = I ·
RL + R2
RL
IR2 = I ·
RL + R2
Potentiometer
+
A
U
1
x
0
A: Start
S: Wiper
E: End
R0
R=
UL
RL
j3,%'"2+0,
–
(x · R0) + RL
UL = U
e+a2+0,
S
x · R0 · RL
UL = U
E
R
R + (1 – x) · R0
x
R0
(x – x2) +1
RL
Winding resistance
RT = Rmot · @J"j$bH0$a$d< A
6%4)%'0#:'%a,%)%3,03-%
Symbol
I"
IL"
IRL"
R"
R M"
RJ, RL"
R L"
Rmot"
R F"
SL"
Name
6+#02"-:''%3#"
X+0,"-:''%3#"
[:''%3#"#$'+:;$"'%(*(#+'"YL"
K?:*/02%3#"'%(*(#03-%"
Y%(*(#03-%!")+#%3#*+4%#%'"
\0'#*02"'%(*(#03-%("
X+0,"'%(*(#03-%"
6%'4*302"'%(*(#03-%!"4+#+'"@-0#02+;"/02:%A"
K?:*/02%3#"'%(*(#03-%"+8"RL"03,"RL"
SI
O
O
O
m
m
m
m
m
m
Symbol
R T"
D"
DJ?$DL"
DL"
d<"
x"
Name
Y%(*(#03-%"0#"#%4)%'0#:'%"T"
6+#02"/+2#0;%"
\0'#*02"/+2#0;%("
X+0,"/+2#0;%"
6%4)%'0#:'%",*88%'%3-%"
\+#%3#*+4%#%'")+(*#*+3"
Symbol
bH0"
Name
Y%(*(#03-%"-+%8&-*%3#!"-+))%'"
SI
m
T
T
T
n
M555J
Value
M5MMSV"naJ
40F+3"E+'4:20%"B03,.++>
5.3
Principles of AC (Alternating Current)
Alternating quantities
T
[f] = J"^$)$[$BS
[l] = J"/ s =
rad / s
t
1
f= T
l$[$Ln$o$2
Ohm's law
I
~
D@tA$[$w$o$-@tA
U(t)
I(t) = Z
U(t)
Z = I(t)
A
V
U
Z
~
Resistances
Reactance
XL
XL
~
~
~
~
XC
XC
b3,:-#*/%^
XL$[$l$o$k$[$Ln$o$2$o$k
[0)0-*#*/%^
1 =
1
XC = !"#"$
2%"#"&"#"$
Impedance (AC resistance)
Z = R2 + X 2
E+'"(%'*%("-+33%-#*+3"+8"R"03,"L, or R"03,"H
Symbol
H"
I"
L"
R"
T"
D"
Name
[0)0-*#03-%"
[:''%3#"
b3,:-#03-%"
K2%-#'*-02"'%(*(#03-%"
\%'*+,"
T+2#0;%"
40F+3"E+'4:20%"B03,.++>"
SI
E
O
B
m
(
T
Symbol
X"
XH"
X L"
Z"
f"
t"
l"
Name
I#03,("8+'"XH or X L"
Y%0-#03-%!"-0)0-*#*/%"
Y%0-#03-%!"*3,:-#*/%"
b4)%,03-%"
E'%?:%3-9"
6*4%"
O3;:20'"8'%?:%3-9"
SI
m
m
m
m
B_
(
'0,P(
SS
G5?+
2$>3."+%.("#0
General
1
f = R
2! · R · C or C 2! · L
[:#a+88"8'%?:%3-9 fH
fC =
\$0(%"($*8#
!"#$%&
Uout
Uin
E)FC3'00+%.("#01+$*("D#'.+".">"*(
O22+1"8'%?:%3-*%("#+")0(("/*'#:0229":3088%-#%,".%2+1"#$%*'"-:#a+88"8'%?:%3-9"fH5
B*;$%'"8'%?:%3-*%("0'%",04)%3%,5
O))2*-0#*+3(^"40F+3"-+3#'+22%'"*3):#(!"-+44:#0#*+3"(*;302"4%0(:'%4%3#"+8"40F+3"4+#+'(5
R
0.707
0.5
Uin
C
! Uout
Uout
Uin
Uout 0.2
Uin 0.1
Uin
R
Uout
I
1 + ( f / fC )2
Uout = Uin
45°
UL
!
1
f = fC
90°
L
Uin
Uout
=
Uin
1.0
UR
I
!
0°
0.1 0.2 0.5
Uout
1
2
5
10
Uout = Uin
f/fC
Xc
R + Xc2
2
R
R + XL2
2
H$D-C3'00+%.("#1+/"#$!'($!"+".">"*(
O22+1"8'%?:%3-*%("#+")0(("/*'#:0229":3088%-#%,"0.+/%"#$%*'"-:#a+88"8'%?:%3-9"fH5
X+1%'"8'%?:%3-*%("0'%",04)%3%,5
C
Uin
R
UC
Uin
Uout
0.2
Uin
0.1
Uin
L
SW"
!
Uout = Uin
45°
Uout
Uout
I
Symbol
H"
I"
L"
R"
DH"
Din"
D L"
f = fC
90°
R
Uin
0.707
0.5
Uout
Uout
1
=
Uin
1 + ( fC / f )2
1.0
Uout
I
!
UR
Name
[0)0-*#03-%"
[:''%3#"
b3,:-#03-%"
K2%-#'*-02"'%(*(#03-%"
T+2#0;%"+/%'"-0)0-*#03-%"
b3):#"/+2#0;%"
T+2#0;%"+/%'"*3,:-#03-%"
!
0°
0.1 0.2 0.5
1
2
5
10
Uout = Uin
f/fC
SI
E
O
B
m
T
T
T
Symbol
Dout"
DR"
XH"
XL"
f"
fH"
i"
Name
H:#):#"/+2#0;%"
T+2#0;%"+/%'"'%(*(#03-%"
Y%0-#03-%!"-0)0-*#*/%"
Y%0-#03-%!"*3,:-#*/%"
E'%?:%3-9"
[:#a+88"8'%?:%3-9"
\$0(%"($*8#"
R
R + XC2
2
XL
R2 + XL2
SI
T
T
m"
m
B_
B_
g
40F+3"E+'4:20%"B03,.++>
6.
6.1
maxon motors
General
What is special about maxon motors?
6$%"heart"+8"#$%"40F+3"4+#+'"*("#$%"self-supporting ironless copper winding5
H:#(#03,*3;"8%0#:'%("+8"#$%"40F+3"]["4+#+'(^
– B*;$"%8&-*%3-9"o"X+1")+1%'"-+3(:4)#*+3
– T%'9"2+1"4+4%3#"+8"*3%'#*0"o"B*;$%(#"0--%2%'0#*+3
– X+1"*3,:-#03-%"o"X+3;"(%'/*-%"2*8%
– X*3%0'"-$0'0-#%'*(#*-("o"G++,"-+3#'+220.*2*#9
– [+4)0-#",%(*;3"o"G++,"/+2:4%P)+1%'"'0#*+
– e+"40;3%#*-"-+;;*3;
– X+1"%2%-#'+40;3%#*-"*3#%'8%'%3-%
– B*;$"'%2*0.*2*#9
maxon DC motor (brushed permanent-magnet energized DC motors)
RE program
– B*;$")+1%'",%3(*#9
– B*;$a?:02*#9"]["4+#+'"1*#$"e,E%`"40;3%#
– B*;$"()%%,("03,"#+'?:%(
– Y+.:(#",%(*;3"@4%#02"i03;%A
!x$>$xF$++
A-max program
– G++,")'*-%P)%'8+'403-%"'0#*+
– ]["4+#+'"1*#$"O2e*[+"40;3%#
– O:#+40#%,"403:80-#:'*3;")'+-%((
!ZY$>$yY$++
RE-max program
– B*;$")%'8+'403-%"0#"2+1"-+(#(
– [+4.*3%("'0#*+302"403:80-#:'*3;"03,"
" ,%(*;3"+8"#$%"Oa40F"4+#+'("1*#$"#$%"$*;$%'"
" )+1%'",%3(*#9"+8"#$%"e,E%`"40;3%#(
– O:#+40#%,"403:80-#:'*3;")'+-%((
!Zy$>$Y\$++
Properties of the two brush systems
Graphite brushes
– D%22"(:*#%,"8+'"$*;$"
" -:''%3#("03,")%0>"-:''%3#(
– D%22"(:*#%,"8+'"(#0'#a(#+)"03,"
" '%/%'(%"+)%'0#*+3
– X0';%'"4+#+'("@8'+4"0))'+F5"JM"DA
–
–
–
–
–
B*;$%'"8'*-#*+3!"$*;$%'"3+a2+0,"-:''%3#
e+#"(:*#%,"8+'"2+1"-:''%3#(
B*;$%'"0:,*.2%"3+*(%
B*;$%'"%2%-#'+40;3%#*-"%4*((*+3("
=+'%"-+4)2%F"03,"$*;$%'"-+(#(
40F+3"E+'4:20%"B03,.++>"
Precious metal brushes
– D%22"(:*#%,"8+'"2+1%(#
" -:''%3#("03,"/+2#0;%(
– D%22"(:*#%,"8+'"-+3#*3:+:("+)%'0#*+3
– I4022%'"4+#+'(
– T%'9"2+1"8'*-#*+3!"2+1"0:,*.2%"3+*(%
– X+1"%2%-#'+40;3%#*-"%4*((*+3(
– [+(#"%88%-#*/%
– e+#"(:*#%,"8+'"$*;$"-:''%3#("03,"
" )%0>"-:''%3#(
– e+#"(:*#%,"8+'"(#0'#a(#+)"+)%'0#*+3
SZ
maxon EC motor
`':($2%(("]["4+#+'("@`X]["4+#+'(A
– =+#+'".%$0/*+'"(*4*20'"#+".':($%,"]["4+#+'
– ]%(*;3"(*4*20'"#+"(93-$'+3+:("4+#+'"@Sa)$0(%"(#0#+'"1*3,*3;!"'+#0#*3;")%'403%3#"40;3%#A
– \+1%'*3;"+8"#$%"S")$0(%("0--+',*3;"#+"#$%"'+#+'")+(*#*+3".9"0"-+44:#0#*+3"%2%-#'+3*-(
maxon EC range
– \+1%'a+)#*4*_%,!"1*#$"$*;$"()%%,("
" :)"#+"JMM"MMM"')4
– Y+.:(#",%(*;3
– T0'*+:("#9)%(^"%5;5"($+'#"p"2+3;!"(#%'*2*_0.2%
– X+1%(#"'%(*,:02"*4.0203-%
!x$>$xG$++
EC-max range
– O##'0-#*/%")'*-%P)%'8+'403-%"'0#*+
– Y+.:(#"(#%%2"$+:(*3;
– I)%%,(":)"#+"LM"MMM"')4
– Y+#+'"1*#$"+3%")+2%")0*'
!Zx$>$zG$++
EC-4pole range
–
–
"
–
–
"
–
"
B*;$%(#")+1%'",%3(*#9"#$03>("#+"Wa)+2%"'+#+'
n3*##%,"1*3,*3;!"(9(#%4"40F+3®"1*#$"+)#*4*a
_%,"*3#%'-+33%-#*+3"+8"#$%")0'#*02"1*3,*3;(
I)%%,(":)"#+"LZ"MMM"')4
B*;$a?:02*#9"40;3%#*-"'%#:'3"40#%'*02"#+
'%,:-%"%,,9"-:''%3#"2+((%(
=%-$03*-02"#*4%"-+3(#03#(".%2+1"S
4*22*(%-+3,(5
!YY$>$zF$++
>'B)*+I@+J'(+>)()#
– O##'0-#*/%")'*-%P)%'8+'403-%"'0#*+
– B*;$"#+'?:%(",:%"#+"%F#%'302!"
" 4:2#*)+2%"'+#+'
– KF-%22%3#" $%0#" ,*((*)0#*+3" 0#" $*;$%'" ()%%,(!"
" '%(:2#*3;"8'+4"#$%"#+"+)%3",%(*;3
– I)%%,("+8":)"#+"LM"MMM"')4
!ZG$>$\G$++
maxon EC-i range
– B*;$29",9304*-",:%"#+"*3#%'302!"
" 4:2#*)+2%"'+#+'
– =%-$03*-02"#*4%"-+3(#03#("
" .%2+1"S"4*22*(%-+3,(
– I)%%,("+8":)"#+"JZ"MMM"')4
!zG$++
SQ"
40F+3"E+'4:20%"B03,.++>
Electronic commutation
Commutation type
Rotor position determination
Block commutation
1*#$"B022"(%3(+'(
(%3(+'2%((
Signal sequence diagram
for the Hall sensors (HS)
EMF
!
0° 60 120 180 240 300 360
Block-shaped phase currents
1
0
1
HS 2
0
1
HS 3
0
HS 1
"
0°
0° 60° 120°180° 240°300° 360°
Turning angle
Supplied motor voltage
(phase to phase)
+
U 1-2
EMF
"
60° 120° 180° 240° 300° 360°
#
#
+
Legend
! Star point
" Time delay 30°
# Zero crossing of EMF
U 2-3
+
U3-1
Sinusoidal commutation
D*#$"%3-+,%'"03,"B022"(%3(+'("@BIA
Sinusoidal phase currents
0°
60° 120° 180° 240° 300° 360°
Turning angle
Comparison of DC and EC motors
DC motor (brushed)
– I*4)2%"+)%'0#*+3"03,"-+3#'+2!"
" %/%3"1*#$+:#"%2%-#'+3*-(
– e+"%2%-#'+3*-")0'#("*3"#$%"4+#+'
– H)%'0#*3;"2*8%"2*4*#%,".9".':($"(9(#%4
– =0F5"()%%,("2*4*#%,".9".':($"(9(#%4
40F+3"E+'4:20%"B03,.++>"
EC motor with HS
Encoder
EC motor (brushless)
– X+3;"+)%'0#*3;"2*8%"03,"$*;$"()%%,("1*#$"
" )'%2+0,%,".022".%0'*3;(
– e+"-+44:#0#+'"0'-*3;
–
–
"
–
b'+3"2+((%("*3"#$%"40;3%#*-"'%#:'3
e%%,("%2%-#'+3*-("8+'"+)%'0#*+3"
@4+'%"-0.2%("03,"$*;$%'"-+(#(A
K2%-#'+3*-")0'#("*3"#$%"4+#+'"@B022"(%3(+'(A
SR
6.2
Power consideration of the DC motor: in general
Motor as energy converter
PJ= Rmot!"!#mot2
Pel= Umot!"!#mot
PL =
Lel$[$LL$j$LV
\+1%'".0203-%!"4+#+'
Power P
Speed n
Umot · Imot = ! · n · M + Rmot · Imot2
30
PL
b3"#$%"()%%,a#+'?:%",*0;'04!"#$%"+:#):#")+1%'"
*("%?:*/02%3#"#+"#$%"0'%0"+8"#$%"'%-#03;2%".%2+1"
#$%"()%%,a#+'?:%"2*3%5"6$*("'%-#03;2%"*("20';%(#"
0#"$028"#$%"(#022"#+'?:%"03,"$028"#$%"3+a2+0,"
()%%,5"
6$%")+1%'"-:'/%"*("0")0'0.+20!"1$+(%"
40F*4:4"/02:%"*(")'+)+'#*+302"#+"#$%"(?:0'%"
+8"#$%"4+#+'"/+2#0;%5
Umot > UN
Umot = UN
PL
n0
MH
Symbol
Imot"
T"
T H"
L"
Lel"
LV"
LL"
Rmot"
"
SU"
$
n·M
30
Name
=+#+'"-:''%3#"
6+'?:%"
I#022"#+'?:%"
\+1%'"
K2%-#'*-02"*3):#")+1%'"
q+:2%")+1%'"2+(("
=%-$03*-02"+:#):#")+1%'"
6%'4*302"'%(*(#03-%!"4+#+'"
@-0#02+;"/02:%A"
Torque M
SI
O
e4
e4
D
D
D
D
Symbol
Dmot"
D N"
"
Name
=+#+'"/+2#0;%"
e+4*302"/+2#0;%!"4+#+'"
@-0#02+;"/02:%A"
Symbol
n"
n M"
Name
I)%%,"+8"'+#0#*+3"
e+"2+0,"()%%,"
SI
T
T
maxon
')4
')4
m
40F+3"E+'4:20%"B03,.++>
6.3
Motor constants and diagrams
Motor constants
6$%"speed constant kn"03,"#$%"torque constant kM"0'%"#1+"*4)+'#03#"-$0'0-#%'*(#*-"/02:%("8+'"
#$%"%3%';9"-+3/%'(*+35
Speed constant kn
6$%"()%%,"-+3(#03#"kn"-+4.*3%("#$%"()%%,"n 1*#$"#$%"/+2#0;%" n = kn$o$Dind
*3,:-%,"*3"#$%"1*3,*3;$Dind @fK=EA5
Torque constant kM
6$%"#+'?:%"-+3(#03#"k T"2*3>("#$%")'+,:-%,"#+'?:%"T$1*#$"#$%"
%2%-#'*-02"-:''%3# I.
T$[$/T$o$-mot
Information:"40F+3":3*#"4e4PO
kn · kM =
Dependence between kn and kM
@40F+3":3*#(A
30 000
!
=1
[
mNm
rpm
·
A
V
]
rad Nm
·
s·V
A
Speed-torque line
]%(-'*.%("#$%"4+#+'".%$0/*+'"r"*5%5")+((*.2%"+)%'0#*3;")+*3#(" nM$`$/n$o$Dmot
@9?$TA"r"0#"0"-+3(#03#"/+2#0;%"Dmot
TH = kT$o$-O
Speed n
TR = kT$o$-M
U
mo
t
>U
!#
#$%$&#$'$(mot$)$$$$$$$$$$'$"
!"
@40F+3":3*#(A
N
n0
U
∆n
mo
t
=U
I)%%,P#+'?:%";'0,*%3#^
N
∆M
MR
MH
I0
IA
Symbol
Imot"
I O"
I M"
k T"
T"
T H"
TR"
Rmot"
Dind"
Torque M
Motor current Imot
Name
SI
=+#+'"-:''%3#"
O
I#0'#*3;"-:''%3#"
O
e+"2+0,"-:''%3#"
O
6+'?:%"-+3(#03#"@-0#02+;"/02:%A"
e4PO
6+'?:%"
e4
I#022"#+'?:%"
e4
E'*-#*+3"#+'?:%"
e4
6%'4*302"'%(*(#03-%!"4+#+'"@-0#02+;"/02:%A" m
b3,:-%,"/+2#0;%"
T
40F+3"E+'4:20%"B03,.++>"
30 000 Rmot
n0
!n
=
· 2 #
!M
kM
MH
"
@40F+3":3*#(A
Symbol
Dmot"
D N"
Name
=+#+'"/+2#0;%"
e+4*302"/+2#0;%!"4+#+'"@-0#02+;"/02:%A"
Symbol
k n"
n"
n M"
d9^dT"
"
Name
I)%%,"-+3(#03#"@-0#02+;"/02:%A"
I)%%,"+8"'+#0#*+3"
e+"2+0,"()%%,"
I)%%,P#+'?:%";'0,*%3#!"4+#+'"
@-0#02+;"/02:%A"
SI
T
T
maxon
')4/T
')4
')4
')4P4e4
SV
Voltage equation, motor
Imot
+
U$%" = L$%" ·
Lmot
Umot
!#
+ R$%" · I$%" + U#&'
!"
R$%" · I$%" + U#&'(
]%'*/%,"8'+4"#$*("#$%"()%%,"+8"'+#0#*+3"0("0"
8:3-#*+3"+8"#$%"2+0,"@()%%,a#+'?:%"2*3%A
Rmot
!#
#$%$&#$'$(mot$) !# '$"$%$#0$)$$$$$$$$$$'$"
!"
!"
EMF
Uind
@40F+3":3*#(A
–
I,%&$"*&=+&K#!"+,LMN
Efficiency !
Speed n
!max
"#$
n0
Umot = UN
!
'#%#((#)#(*#)
·
(with#(R#$#+M#%#&0)
Umot#%#&mot
30 000
!max = 1 –
I0
IA
2
MH
Torque M
Symbol
XTA"
I M"
I O"
Imot"
k T"
Lmot"
T"
T H"
TR"
Rmot"
DN"
Dind"
WM"
Name
SI
K2%-#'+4+#*/%"8+'-%"
T
e+"2+0,"-:''%3#"
O
I#0'#*3;"-:''%3#"
O
=+#+'"-:''%3#"
O
6+'?:%"-+3(#03#"@-0#02+;"/02:%A"
e4PO
6%'4*302"*3,:-#03-%!"4+#+'"@-0#02+;"/02:%A"" B
6+'?:%"
e4
I#022"#+'?:%"
e4
E'*-#*+3"#+'?:%"
e4
6%'4*302"'%(*(#03-%!"4+#+'"@-0#02+;"/02:%A" m
e+4*302"/+2#0;%!"4+#+'"@-0#02+;"/02:%A"
T
b3,:-%,"/+2#0;%"
T
Symbol
Dmot"
{'"
{!"
q"
qmax"
Name
SI
=+#+'"/+2#0;%"
T
[:''%3#"-$03;%"
O
6*4%"-$03;%"
(
K8&-*%3-9
=0F*4:4"%8&-*%3-9"0#"DN @-0#02+;"/02:%A"
Symbol
k n"
n"
n M"
d9^dT"
"
Name
I)%%,"-+3(#03#"@-0#02+;"/02:%A"
I)%%,"+8"'+#0#*+3"
e+"2+0,"()%%,"
I)%%,P#+'?:%";'0,*%3#!"4+#+'"
@-0#02+;"/02:%A"
maxon
')4PT
')4
')4
')4P4e4
40F+3"E+'4:20%"B03,.++>
6.4
Acceleration
Angular acceleration: Start with constant current
n0
Speed n
ML, nL
lmot = constant
MH
O--%2%'0#*+3
M
k "!"I
!"#
# M mot
JR"$"%L
JR"$"%L
Torque M
n0
nL
Speed n
Y04)"#*4%"#+"2+0,"()%%,
J #)#*L
J #)#*
%
%
!"!&"! R
!"#$
!"!&"! R M L $
kM#!"I'("
30
30
!t
Time t
Angular acceleration: Start with constant terminal voltage
n0
Speed n
ML, nL
O--%2%'0#*+3!"40F*4:4
MH
!max =
JR + JL
Umot = constant
MH
Torque M
n0
nL
Speed n
"m
Symbol
Imot"
V L"
VR"
k T"
T"
T H"
T L"
TR"
Rmot"
t"
Dmot"
!t
Time t
Name
SI
=+#+'"-:''%3#"
O
=+4%3#"+8"*3%'#*0!"2+0,"
>;4L
=+4%3#"+8"*3%'#*0!"'+#+'"@-0#02+;"/02:%A" >;4L
6+'?:%"-+3(#03#"@-0#02+;"/02:%A"
e4PO
6+'?:%"
e4
I#022"#+'?:%"
e4
X+0,"#+'?:%"
e4
E'*-#*+3"#+'?:%"
e4
6%'4*302"'%(*(#03-%!"4+#+'"@-0#02+;"/02:%A" m
6*4%"
(
=+#+'"/+2#0;%"
T
40F+3"E+'4:20%"B03,.++>"
Y04)"#*4%"#+"2+0,"()%%,
M + MR
· n0
1– L
MH
'
!"#$#%m · ln
M + MR
1– L
· n0 – nL
MH
=%-$03*-02"#*4%"-+3(#03#"1*#$"2+0,"*3%'#*0
(J + JL) · Rmot
!m' = R
k M2
Symbol
b"
bmax"
d!"
t m"
t m|"
"
Name
SI
O3;:20'"0--%2%'0#*+3"
'0,P(L
=0F*4:4"03;:20'"0--%2%'0#*+3"
'0,P(L
O--%2%'0#*+3"#*4%"
(
=%-$03*-02"#*4%"-+3(#03#"@-0#02+;"/02:%A"
(
=%-$03*-02"#*4%"-+3(#03#"
1*#$"0,,*#*+302"VL"
(
Symbol
n"
n M"
nL"
d9"
Name
I)%%,"+8"'+#0#*+3"
e+"2+0,"()%%,"
X+0,"()%%,"
I)%%,"-$03;%"
maxon
')4
')4
')4
')4
WJ
6.5
Motor selection
Motor type selection
=+#+'"#9)%"(%2%-#*+3"
.0(%,"+3"#$%"'%?:*'%,"#+'?:%(
T N$}$TUTP
TH$}$Tmax
Speed n
Max. permissible speed
Continuous
operation
MRMS MN
Short-term operation
Mmax
MH
Y++#"4%03"(?:0'%"2+0,"@Y=IA
Torque M
MRMS =
1
(t · M12 + t2 · M22 + ... + tn · Mn2)
ttot 1
Remark:
O"4+#+'"#9)%"@%5;5"YKSMA"*(",%&3%,".9^"*#("(*_%!"#$%"4%-$03*-02"+:#):#")+1%'!"#$%".%0'*3;"(9(#%4"
+8"#$%"($08#!"#$%"-+44:#0#*+3"(9(#%4":(%,"03,"#$%")+((*.2%"-+4.*30#*+3("1*#$";%0'$%0,("03,"
(%3(+'("@40F+3"4+,:20'"(9(#%4A
Winding selection
E+'"03"+)#*4:4"40#-$".%#1%%3"#$%"%2%-#'*-02"03,"4%-$03*-02")+1%'"-+4)+3%3#("+8"#$%"4+#+'5
k n"()%-*&%("#$%"1*3,*3;^
I%2%-#"1*3,*3;"1*#$
Speed n
n0,theor
$&
nmax +
'!%max
n0,theor
$%
kn!"!#n,theor =
=
Umot
Umot
Speed-torque line
high enough for all
operating points
Safety
factor
~ 20%
nmax
Deceleration
Acceleration
Mmax
Torque M
@40F+3":3*#(A
1$%'%"nmax?$Tmax *("#$%"%F#'%4%"+)%'0#*3;")+*3#"
03," d9^dT" #$%" 0/%'0;%" ()%%,P#+'?:%" ;'0,*%3#"
+8"#$%"(%2%-#%,"4+#+'"#9)%5
Recommendation:"O,,"0"(08%#9"80-#+'"+8"0))'+F5"LMc"#+"kn #+"-+4)%3(0#%"8+'"#+2%'03-%("03,"2+0,"
-$03;%(s".:#",+"3+#"(%2%-#"#++"20';%"0"/02:%"8+' kn!"0("#$*("1+:2,"2%0,"#+"20';%"-:''%3#(5
Y%?:*'%,"40F*4:4"4+#+'"-:''%3#
Symbol
Imot"
I M"
k T"
TJ...n"
T"
T H"
T N"
TUTP"
Tmax"
n"
Dmot"
WL"
M
Imot = I0 + kmax
M
Name
SI Symbol
=+#+'"-:''%3#"
O tJ…n"
e+"2+0,"-:''%3#"
O ttot"
6+'?:%"-+3(#03#"@-0#02+;"/02:%A"
e4PO
6+'?:%"0#"+)%'0#*3;")+*3#("J...n"
e4 Symbol
6+'?:%"
e4 k n"
I#022"#+'?:%"
e4 k n,theor"
e+4*302"#+'?:%!"4+#+'"@-0#02+;"/02:%A"
e4 n"
Y=I"#+'?:%"
e4 nmax"
=0F*4:4"#+'?:%"*3"2+0,"-9-2%"
e4 n M,theor"
I)%%,"+8"'+#0#*+3"
')4 d9^dT"
=+#+'"/+2#0;%"
T "
Name
]:'0#*+3"+8"+)%'0#*3;")+*3#("J...n"
6+#02"#*4%!"+)%'0#*3;"-9-2%"
Name
I)%%,"-+3(#03#"@-0#02+;"/02:%A"
Y%?:*'%,"()%%,"-+3(#03#"
I)%%,"+8"'+#0#*+3"
=0F*4:4"()%%,"*3"2+0,"-9-2%"
Y%?:*'%,"3+"2+0,"()%%,"
I)%%,P#+'?:%";'0,*%3#!"4+#+'
@-0#02+;"/02:%A"
SI
(
(
maxon
')4PT
')4PT
')4
')4
')4
')4P4e4
40F+3"E+'4:20%"B03,.++>
7.
maxon sensor
maxon incremental encoder
360°e
90°e
Channel A
Channel B
Signal edges (quadcounts)
Index channel I
Recommended applications
QUAD MEnc
MR
EASY
MILE
Optical
B*;$"3:4.%'"+8"-+:3#(
✘
✘
✔
✔
✔
✔
B*;$"()%%,(
✔
✔
✔
✔
✔
✘
X+1"()%%,(
✘
✘
✔
✔
✔
✔
X*3%",'*/%'"@*3"#$%"-0(%"+8"2+3;"
-0.2%(!"'+:;$"04.*%3#"-+3,*#*+3(!"
)+(*#*+3*3;"0))2*-0#*+3(A
✘
✘
✔
✔
✔
✔
X+1")+(*#*+3*3;"0--:'0-9"+'"
)+(*#*+3*3;"1*#$";%0'$%0,
✘, ✔
✔
✔
✔
✔
✔
B*;$")+(*#*+3*3;"0--:'0-9
✘
✘
✘, ✔
✔
✔
✔
b3,%F"-$033%2"@8+'")'%-*(*+3"$+4*3;A ✘
✘
✔
✔
✔
✔
]:(#!",*'#!"+*2
✔
✔
✔
✔
✔
✘
b+3*_*3;"'0,*0#*+3
@✔A
@✔A
✘
✘
✘
✘
KF#%'302"40;3%#*-"&%2,(
✘
✘
✘
@✔A
✔
✔
=%-$03*-0229"'+.:(#
✔
✘
✘
✔
✔
✘
✔!Y%-+44%3,%,
✔ D*#$"'%(#'*-#*+3("
40F+3"E+'4:20%"B03,.++>"
@✔A"H)#*+302"@+3"'%?:%(#A"
✘ e+#"'%-+44%3,%,
WS
Counts per turn from position resolution
Y%?:*'%,"-+:3#(")%'"#:'3"N of the
%3-+,%'"8+'"0"()%-*&%,")+(*#*+3*3;" !"#" 360°
$%"&"'
0--:'0-9"+8"di,
Remark:"`9"%/02:0#*3;"#$%"?:0,-+:3#("@75A!"0"8+:'"#*4%("$*;$%'"'%(+2:#*+3"*("0-$*%/%,5"6$*("*("
'%-+44%3,%,"8+'"0"(:8&-*%3#29"0--:'0#%")+(*#*+3*3;5
Measurement resolution, motor speed
Example:
=%0(:'%4%3#"'%(+2:#*+3"d~^
J"?-P4(
[+:3#(")%'"#:'3"N!"%3-+,%'^
ZMM"[\6
!" =
!#
Q·N
!#
!" =
=
Q·N
1
qc
ms
=
qc
!""""""""""#"$%%"CPT
CPT
qc
$%"
= (% rpm
'%%%"qc
&%"%%%"
Comment:"6$%"0-$*%/0.2%"()%%,"(#0.*2*#9"*("4:-$"$*;$%'"#$03"#$%"0.+/%"4%0(:'%4%3#"
'%(+2:#*+3!",:%"#+"#$%"40(("*3%'#*0("03,"8%%,"8+'10',"@*8"0))2*-0.2%A5
Symbol
N"
i"
~$[$W"
d~"
WW"
Name
[+:3#(")%'"#:'3""
Y%,:-#*+3"'0#*+!"4%-$03*-02",'*/%
t:0,-+:3#(")%'"):2(%"
=%0(:'%4%3#"'%(+2:#*+3""
SI Symbol
"[\6 di"
?-Pb=\ Symbol
?-P4( d9$"
Name
\+(*#*+3"'%(+2:#*+3"
SI
g
Name
maxon
=%0(:'%4%3#"'%(+2:#*+3!"4+#+'"()%%,"
')4
40F+3"E+'4:20%"B03,.++>
8.
8.1
maxon controller
Operating quadrants
Operating quadrants
Quadrant II
Braking operation
Clockwise (cw)
n
n
n
M
Quadrant III
Motor operation
Counterclockwise
(ccw)
8.2
Quadrant I
Motor operation
Clockwise (cw)
1-Q operation
– H329"4+#+'"+)%'0#*+3
" @t:0,'03#"b"+'"t:0,'03#"bbbA
– ]*'%-#*+3"'%/%'(02"/*0",*;*#02"(*;302
– 69)*-02^"04)2*&%'"8+'"K["4+#+'(
– `'0>*3;"*("3+#"-+3#'+22%,"@8'*-#*+3A!"
" +8#%3"(2+1
M
4-Q operation
– [+3#'+22%,"4+#+'"+)%'0#*+3"
" 03,".'0>*3;"+)%'0#*+3"*3".+#$"
" '+#0#*+3",*'%-#*+3("@022"W"?:0,'03#(A
– O"4:(#"8+'")+(*#*+3*3;"#0(>(
M
M
M
n
n
Quadrant IV
Braking operation
Counterclockwise
(ccw)
Selection of power supply
Required supply voltage at given load (nL, ML)
VCC!"
()
#%
+ #(max (maxon units)
L
%0,() &!!!%L!'!!!!!!!!!&!$
#$
Notes:
– b3"#$%"-0(%"+8"0"Wt"(%'/+"04)2*&%'!"#$%")+1%'"(:))29"$0("#+".%"0.2%"#+"0.(+'."#$%">*3%#*-"%3%';9
" ;%3%'0#%,"@8+'"%F04)2%"*3"0"-0)0-*#+'A"1$%3"#$%"2+0,"*(",%-%2%'0#%,5
– D$%3"0"(#0.*2*_%,")+1%'"(:))29"*(":(%,!"#$%"+/%'-:''%3#")'+#%-#*+3"$0("#+".%",%0-#*/0#%,"8+'"
" #$%"+)%'0#*3;"'03;%5
– 6$%"8+'4:20"*3-2:,%("#$%"40F*4:4"/+2#0;%",'+)"dD$+8"#$%"-+3#'+22%'"0#"40F*4:4"-+3#*3:+:("
" -:''%3#5
Achievable speed at given voltage supply
nL!"!!!(VCC #!$U max ) ·
Symbol
T"
TL"
DN"
VHH"
dDmax"
n0,UN
UN
Name
SI Symbol
6+'?:%"
e4 n"
X+0,"#+'?:%"
e4 nL"
e+4*302"/+2#0;%!"4+#+'"@-0#02+;"/02:%A"
T nM!D_"
I:))29"/+2#0;%"
T d9^dT"
=0F*4:4"/+2#0;%",'+)"+8"#$%"-+3#'+22%'"
T "
40F+3"E+'4:20%"B03,.++>"
–
$&
$% '!%L
(maxon units)
Name
maxon
I)%%,"+8"'+#0#*+3"
')4
X+0,"()%%,"
')4
e+"2+0,"()%%,"4+#+'"0#"DN"@-0#02+;"/02:%A""')4
I)%%,P#+'?:%";'0,*%3#!"4+#+'
@-0#02+;"/02:%A"
')4P4e4
WZ
8.3
Size of the motor choke with PWM controllers
Calculation of current ripple
PWM scheme
1-Q
=0F*4:4"
-:''%3#"'*))2%!"
)%0>a#+a)%0>
!"PP,max =
[02-:20#*+3"Ltot
Ltot = Lint + M5S555M5U$o$kmot + Lext
VCC
4 · Ltot · fPWM
2-level (4-Q)
3-level (4-Q)
VCC
!"PP,max = 2 · L
· fPWM
tot
VCC
!"PP,max = 4 · L
· fPWM
tot
6$%"%88%-#*/%"4+#+'"*3,:-#03-%"*3"#$%"-0(%"+8"(?:0'%"\D="%F-*#0#*+3"+329"04+:3#("#+"0))'+F5"
SM"p"UMc"+8"#$%"-0#02+;"/02:%"Lmot.
6$%"-0#02+;"/02:%"Lmot *(",%&3%,"0#"0"8'%?:%3-9"+8"J">B_ 1*#$"(*3:(+*,02"%F-*#0#*+3.
–
"
–
"
O#"0"-:''%3#"'*))2%"+8"d-LL$u"J5Z"h"IN #$%"4+#+'"-03"(#*22".%"2+0,%,"#+"0))'+F5"VMc"+8"#$%"
3+4*302"-:''%3#"IN @-0#02+;"/02:%A5
O#"0"-:''%3#"'*))2%"+8"d-LL$v"J5Z"h"IN !"*#"*("'%-+44%3,%,"#+":(%"03"%F#%'302"4+#+'"-$+>%!"
*3"0--+',03-%"1*#$"#$%"8+'4:20".%2+15
Calculation, additional external motor choke
PWM scheme
1-Q and 3-level (4-Q)
Y:2%"+8"#$:4.
Lext =
Lext$r$M"
Lext > M"
2-level (4-Q)
VCC
6 · IN · fPWM – Lint – 0.3 · Lmot
VCC
Lext = 3 · I
– Lint – 0.3 · Lmot
· fPWM
N
e+"0,,*#*+302"4+#+'"-$+>%"'%?:*'%,
O,,*#*+302"4+#+'"-$+>%"'%-+44%3,%,
DC amplifier
EC amplifier
Lint
/2 Lint
1
1
1
1
Lext
/2 Lext
PWM
PWM
DC
motor
Lmot
/2 Lint
/2 Lext
PWM
1
/2 Lint
EC
motor
Lmot
1
/2 Lext
PWM
Symbol
f LJT
I N"
Lext"
"
Lint"
WQ"
Name
\D="8'%?:%3-9
e+4*302"-:''%3#!"4+#+'"@-0#02+;"/02:%A
b3,:-#03-%!"0,,*#*+302"%F#%'302"
4+#+'"-$+>%""
b3,:-#03-%!".:*2#a*3"-$+>%"-+3#'+22%'""
SI Symbol
B_ Lmot"
O Ltot"
VHH"
B d-LL
B d-LL?+.@"
Name
6%'4*302"*3,:-#03-%!"4+#+'"@-0#02+;"/02:%A"
6+#02"*3,:-#03-%"
I:))29"/+2#0;%"
[:''%3#"'*))2%!")%0>a#+a)%0>""
=0F*4:4"-:''%3#"'*))2%!")%0>a#+a)%0>""
SI
B
B
T
O
O
40F+3"E+'4:20%"B03,.++>
9.
9.1
Thermal behavior
Basics
Heat sources
Iron losses in EC
Y%40;3%#*_0#*+3"2+((%(
motors and motors
!
with iron core winding PV, magn = 30 n · Mmagn
K,,9"-:''%3#"2+((%(
LV,eddy$[$519)!$o$9L
Resistance R
Joule power losses
in winding
LV = R<J · ImotL
RTW
Rmot
25°C
TW
R<J = Rmot · wJ$j$bH0 · @TJ – LZHAx
Temperature T
Friction losses: in the bearings and in the brushes (brushed DC motors)
Losses in the
gearhead
Efficiency !
100%
80%
60%
40%
PV,R = ! · nmot · Mmot · (1"#"$G )
30
1-stage
3-stage
5-stage
PV,R =
Torque M
MG, cont
!
1#$#"G
· n · ML ·
30 L
"G
Stall torque reduced through temperature rise
E*'(#"0))'+F*40#*+3s"-02-:20#%,"8'+4"/+2#0;%"03,"*3-'%0(%,"
1*3,*3;"'%(*(#03-%
@6%4)%'0#:'%",%)%3,%3-%"+8"k T"3+#"-+3(*,%'%,A
MHT = kM · IAT = kM ·
Umot
RTW
Storing heat
~$[$5$o$+$o$d<$[$Hth$o$d<
~$[$Lv$o$!
D*3,*3;^"H!"?J = cH0$o$+J
I#0#+'^"H!"?P = cFe$o$+mot
Symbol
Hth"
H!"?M"
H!"?P"
H!"?J"
c"
I O<"
Imot"
k T"
T"
TM?519t"
"
THT"
T L"
Tmagn"
Tmot"
m"
m M"
mmot"
mJ"
LV"
LV"
LV,eddy"
Name
SI
B%0#"-0)0-*#9"
qPn
B%0#"-0)0-*#9";%0'$%0,"
qPn
B%0#"-0)0-*#9"(#0#+'"
qPn
B%0#"-0)0-*#9"1*3,*3;"
qPn
I)%-*&-"$%0#"-0)0-*#9"
qP@>;nA
I#0'#*3;"-:''%3#"0#"#%4)%'0#:'%"TJ"
O
=+#+'"-:''%3#"
O
6+'?:%"-+3(#03#"@-0#02+;"/02:%A"
e4PO
6+'?:%"
e4
=0F*4:4"-+3#*3:+:("#+'?:%!";%0'$%0,
@-0#02+;"/02:%A"
e4
I#022"#+'?:%"0#"#%4)%'0#:'%"TJ"
e4
X+0,"#+'?:%"
e4
6+'?:%"8+'"'%/%'(02"+8"40;3%#*_0#*+3"
e4
=+#+'"#+'?:%""
e4
=0(("
>;
=0((!";%0'$%0,"
>;
=0((!"4+#+'"
>;
=0((!"1*3,*3;"
>;
q+:2%")+1%'"2+((%("
D
\+1%'"2+((%("
D
K,,9"-:''%3#")+1%'"2+((%("
D
40F+3"E+'4:20%"B03,.++>"
G%0'$%0,^"H!"?M = cFe$o$+M
Symbol
LV,magn"
LV,R"
~"
Rmot"
R<J"
T"
T J"
t"
Dmot"
d<"
q"
q M"
Name
\+1%'"2+((%("8+'"'%/%'(02"+8"40;3%#*_0#*+3"
E'*-#*+3")+1%'"2+((%("
I#+'%,"$%0#"
6%'4*302"'%(*(#03-%!"4+#+'"@-0#02+;"/02:%A"
D*3,*3;"'%(*(#03-%"0#"-:''%3#"#%4)5"TJ"
6%4)%'0#:'%"
D*3,*3;"#%4)%'0#:'%"
6*4%"
=+#+'"/+2#0;%"
6%4)%'0#:'%",*88%'%3-%"
K8&-*%3-9
G%0'$%0,"%8&-*%3-9
SI
D
D
q
m
m
g[
g[
(
T
n
Symbol
n"
nL"
nmot"
Name
I)%%,"+8"'+#0#*+3"
X+0,"()%%,"
=+#+'"()%%,"
Symbol
bH0"
cH0"
cFe"
Name
Value
Y%(*(#03-%"-+%8&-*%3#!"-+))%'"
M5MMSV"naJ
I)%-*&-"$%0#"-0)0-*#9"-+))%'"
SUM"qP@>;nA
I)%-*&-"$%0#"-0)0-*#9"*'+3" WZM"y"WRM"qP@>;nA
maxon
')4
')4
')4
WR
Analogy to electrical circuit:
Thermal
Power loss PV
Current I
Electrical
C1
TW
Cth,W
R1
Rth1
∆TW
U1
TS
Cth,s
C2
Rth2
∆TS
U2
TA
GND
R2
Thermal "#B#.!$314
X+((%(
Electrical "#H0&&#9!$314
[:''%3#"(+:'-%
Symbol
~$
LV
d< J
d<P
TO
RthJ
"
RthL
"
H!"?J
H!"?P
Symbol
~$
I
DJ
DL
M_C
RJ
Name
K2%-#'*-"-$0';%$
[:''%3#$
T+2#0;%!")+#%3#*02",*88%'%3-%
T+2#0;%!")+#%3#*02",*88%'%3-%
G'+:3,
K2%-#'*-02"'%(*(#03-%$
RL
K2%-#'*-02"'%(*(#03-%$
u
HJ
HL
K2%-#'*-02"-0)0-*#03-%
K2%-#'*-02"-0)0-*#03-%
F
F
Name
Unit
I#+'%,"$%0#$
V
\+1%'"2+((%($
J$[$V^)
6%4)%'0#:'%",*88%'%3-%!"1*3,*3;"p"04.*%3#$
E
6%4)%'0#:'%",*88%'%3-%!"(#0#+'"p"04.*%3#$
E
O4.*%3#"#%4)%'0#:'%$
H$IEK
6$%'45"'%(*(#03-%!"1*3,*3;"p"$+:(*3;
@-0#02+;"/02:%A$
E^J
6$%'45"'%(*(#03-%!"$+:(*3;"p"04.*%3#
@-0#02+;"/02:%A$
E^J
B%0#"-0)0-*#9!"1*3,*3;
V^E
B%0#"-0)0-*#9!"(#0#+'$
V^E
Heating of a simple body
Unit
H
O$[$H^)
V
V
V
u
Cooling of a simple body
Temperature T
Temperature T
Tstart
Tend
Heating
63%
Tstart
!Tmax = 100%
Tend
"th
Time t
[ ]
– !t
"#$%& = "#end · 1'(')
Symbol
T"
TO"
Tend"
Tstart"
TP"
T J"
WU"
th
Name
6%4)%'0#:'%"
O4.*%3#"6%4)%'0#:'%"
K3,"#%4)%'0#:'%"
6%4)%'0#:'%"0#"(#0'#"
I#0#+'"#%4)%'0#:'%"
D*3,*3;"#%4)%'0#:'%"
!Tmax = 100%
63%
Cooling
"th
"#$%& = "#start '()
SI
g[
g[
g[
g[
g[
g[
Symbol
t"
d<max"
d<I!K"
"
t th"
Time t
– !t
th
Name
6*4%"
=0F*4:4"#%4)%'0#:'%"-$03;%""
6%4)%'0#:'%"-$03;%"0("0"
8:3-#*+3"+8"#*4%"t"
6$%'402"#*4%"-+3(#03#"
SI
(
n
n
(
40F+3"E+'4:20%"B03,.++>
9.2
Continuous operation
[+3#*3:+:("+)%'0#*+3"*("-$0'0-#%'*_%,".9"0"#$%'402"%?:*2*.'*:45"O8#%'"(%/%'02"(#0#+'"#*4%"-+3(#03#("
#$%"#%4)%'0#:'%",*88%'%3-%".%#1%%3"#$%"'+#+'"03,"(#0#+'"(#09("-+3(#03#!"0("#$%*'"#%4)%'0#:'%(",+"3+#"
*3-'%0(%"8:'#$%'5
Motor: Winding and stator temperature
!
Temperature T
140
#$Heating of the winding in accordance
with the thermal time constant
of the winding !W
120
TW,∞
100
"$Heating of the stator in accordance
80
with the thermal time constant
of the stator !s
!$Thermal equilibrium
d<J = TJ$f$<O = @RthJ + RthLA$o$LV
TS,∞
!"W =
Stator
Rth2
40
#
20
∆TW
"
after several stator time
constants
60
Rth1
Winding
∆TS
Rth1 · RTA · I mot2
1#$#%Cu· Rth1· RTA· I mot2
!"S = "S – "A =
Rth2
!"W
Rth1 + Rth2
Temperature
difference
TA
0
10
1
100
1000
Time t
10000
Gearhead: Housing temperature
PV, G
TG
d<M = TM$f$<O = R!"?M$o$Ls?M
Rth,G
∆TG
R!"?$M : %5;5"%(#*40#%,"1*#$ R!"Y of
4+#+'("1*#$"#$%"(04%"(*_%
PV, G
TA
Symbol
Imot"
LV
Ls?M"
R<O"
Rth,G"
RthJ"
"
RthL"
"
T"
TO"
T M"
TP"
Name
=+#+'"-:''%3#"
q+:2%")+1%'"2+((%("
\+1%'"2+((%(!";%0'$%0,"
D*3,*3;"'%(*(#03-%"0#"#%4)%'0#:'%"TO"
6$%'45"'%(*(#03-%!";%0'$%0,"p"04.*%3#""
6$%'45"'%(*(#03-%!"1*3,*3;"p"$+:(*3;
@-0#02+;"/02:%A""
6$%'45"'%(*(#03-%!"$+:(*3;"p"04.*%3#
@-0#02+;"/02:%A"
6%4)%'0#:'%"
O4.*%3#"#%4)%'0#:'%"
G%0'$%0,"#%4)%'0#:'%"
I#0#+'"#%4)%'0#:'%"
40F+3"E+'4:20%"B03,.++>"
Symbol
TP?"
TJ "
T J?"
t"
d<M"
d<P"
nPD d< J"
tP"
nPD tJ"
g[ "
g[
g[ Symbol
g[ bH0"
SI
O
D
D
m
nPD
Name
SI
K3,"#%4)%'0#:'%!"(#0#+'"
g[
D*3,*3;"#%4)%'0#:'%"
g[
K3,"#%4)%'0#:'%!"1*3,*3;"
g[
6*4%"
(
6%4)%'0#:'%",*88%'%3-%!";%0'$%0,"p"04.*%3#" n
6%4)%'0#:'%",*88%'%3-%!"(#0#+'"p"04.*%3#"
n
6%4)%'0#:'%",*88%'%3-%!"1*3,*3;"p"04.*%3#" n
6$%'45"#*4%"-+3(#03#!"(#0#+'"@-0#02+;"/02:%A" (
6$%'45"#*4%"-+3(#03#!"1*3,*3;
@-0#02+;"/02:%A"
(
Name
Y%(*(#03-%"-+%8&-*%3#!"-+))%'"
Value
M5MMSV"naJ
WV
Permissible nominal current IN
6%4)%'0#:'%a,%)%3,%3-%":3,%'"(#03,0',"4+:3#*3;"
-+3,*#*+3("@8'%%"0*'"-+3/%-#*+3"0#"LZg[s"4+:3#%,"
$+'*_+3#0229"+3")20(#*-")20#%A
Speed n
Max. permissible speed
IN,TA = IN ·
Continuous
operation
nN
Short-term
operation
MN
6%4)%'0#:'%a,%)%3,%3-%":3,%'"4+,*&%,"4+:3#*3;"
-+3,*#*+3(
Torque M
IN Motor current Imot
Tmax – TA
Tmax – 25°C
IN,TA = IN ·
Tmax – TA
Rth1 + Rth2
·
Tmax – 25°C Rth1 + Rth2,mod
Determining Rth2,mod
PV
Motor under original conditions
– b3(#0220#*+3!"80(#%3*3;!"0*'"-*'-:20#*+3
TW
Separate measurement during
continuous operation
O#"039"4+#+'"-:''%3#"Imot
– I#0#+'"#%4)%'0#:'%"TP?$
– O4.*%3#"#%4)%'0#:'%"TO$
Rth1
PV
TS
Rth2, mod
∆TS
Rth2,mod!$!%&S ·
PV
1!"!#Cu · Rth1 · RTA · I mot 2
RTA · I mot 2 · (1!'!#Cu · %&S )
TA
Symbol
Imot"
I N"
I_?<O"
T"
T N"
LV"
R<O"
RthJ"
"
RthL"
"
RthL,mod"
"
TO"
ZM"
Name
=+#+'"-:''%3#"
e+4*302"-:''%3#!"4+#+'"@-0#02+;"/02:%A"
e+4*302"-:''%3#"0("0"8:3-#*+3"+8"TO"
6+'?:%"
e+4*302"#+'?:%!"4+#+'"@-0#02+;"/02:%A"
\+1%'"2+((%("
D*3,*3;"'%(*(#03-%"0#"#%4)%'0#:'%"TO"
6$%'45"'%(*(#03-%!"1*3,*3;"p"$+:(*3;
@-0#02+;"/02:%A""
6$%'45"'%(*(#03-%!"$+:(*3;"p"04.*%3#
@-0#02+;"/02:%A"
6$%'45"'%(*(#03-%!"
$+:(*3;"p"04.*%3#"4+,*&%,"
O4.*%3#"#%4)%'0#:'%"
SI
O
O
O
e4
e4
D
m
Symbol
Tmax"
"
T P"
T J"
d<P"
"
Symbol
nPD n"
nN"
nPD
Symbol
nPD bH0"
g[
Name
=0F5")%'4*((*.2%"1*3,*3;"#%4)%'0#:'%
@-0#02+;"/02:%A"
I#0#+'"#%4)%'0#:'%"
D*3,*3;"#%4)%'0#:'%"
6%4)%'0#:'%",*88%'%3-%!"
(#0#+'"p"04.*%3#"
SI
g[
g[
g[
n
Name
maxon
I)%%,"+8"'+#0#*+3"
')4
e+4*302"()%%,!"4+#+'"@-0#02+;"/02:%A"
')4
Name
Y%(*(#03-%"-+%8&-*%3#!"-+))%'"
Value
M5MMSV"naJ
40F+3"E+'4:20%"B03,.++>
9.3
Cyclic and intermittent operation (continuously repeated)
Y%)%#*#*/%"1+'>"-9-2%("+8"($+'#",:'0#*+3"@#9)*-0229"+329"0"8%1"(%-+3,(A"-03".%"0((%((%,"1*#$"#$%"
(04%"8+'402*(4"0("-+3#*3:+:("+)%'0#*+35
Temperature T
90.00
80.00
Average
end temparture,
winding
Time constant
winding 9s
70.00
60.00
50.00
40.00
30.00
0.1
On Off On
(1s) (3s)
Off
1
10
100 1000 10000
Time t
Average temperature rise during intermittent operation
j(%"%88%-#*/%"-:''%3#"/02:%"@Y=IA"0("4+#+'"
(Rth1 + Rth2 !"#"RTA"#"I RMS 2
!"W =
2+0,5
1#$#%Cu (Rth1 + Rth2 !"#"RTA"#"I RMS 2
!"S =
Rth2
!"W
(Rth1 + Rth2 )
Intermittent operation
Y=I"-:''%3#
IRMS = Ion ·
Current I Ion
IRMS
`0(*-"'%?:*'%4%3#^"IUTP$r$-_?<O
ton toff
Time t
Temperature T
TW,av!
Tmax
Name
[:''%3#"
e+4*302"-:''%3#!"4+#+'"@-0#02+;"/02:%A"
e+4*302"-:''%3#"0("0"8:3-#*+3"+8"TO"
[:''%3#",:'*3;$W_")$0(%""
UTP"-:''%3#"
D*3,*3;"'%(*(#03-%"0#"#%4)%'0#:'%"TO"
6$%'45"'%(*(#03-%!"1*3,*3;"p"$+:(*3;
@-0#02+;"/02:%A""
6$%'45"'%(*(#03-%!"$+:(*3;"p"04.*%3#
@-0#02+;"/02:%A"
6%4)%'0#:'%"
O4.*%3#"#%4)%'0#:'%"
40F+3"E+'4:20%"B03,.++>"
=0F*4:4"2+0,"-:''%3#"8+'"0";*/%3"#*4%"-9-2%
Ion!"!!#N ·
Tmax – TA
ton – toff
·
Tmax – 25°C
ton
HEE",:'0#*+3"8+'"0"2+0,"+8"Ion",:'*3;"ton
I on 2
– 1 % ton
toff!"
Tmax!#!$A
2
I N % T – 25°C
max
TS,∞
Symbol
I"
I N"
I _?<O"
Ion"
IUTP
R<O"
RthJ"
"
RthL"
"
T"
TO"
ton
ton + toff
Symbol
Tmax"
"
TP?"
T J?.("
t"
toff"
ton"
nPD d<P"
d< J"
nPD
g[ Symbol
g[ z[:"
SI
O"
O"
O"
O"
O"
m
Name
SI
=0F5")%'4*((*.2%"1*3,*3;"#%4)%'0#:'%
@-0#02+;"/02:%A"
g[
K3,"#%4)%'0#:'%!"(#0#+'"
g[
O/%'0;%"%3,"#%4)%'0#:'%!"1*3,*3;"
g[
6*4%"
(
HEE"#*4%"
("
He"#*4%"
(
6%4)%'0#:'%",*88%'%3-%!"(#0#+'"p"04.*%3#"
n
6%4)%'0#:'%",*88%'%3-%!"1*3,*3;"p"04.*%3#" n
Name
Y%(*(#03-%"-+%8&-*%3#!"-+))%'"
Value
M5MMSV"naJ
ZJ
9.4
Short-term operation
B*;$!".'*%8!"+3%a#*4%"+/%'2+0,"+8"#$%"4+#+'5"6$%"+)%'0#*+3",:'0#*+3"*("(+"($+'#"#$0#"#$%"#%4)%'0#:'%"
+8" #$%" #$%'40229" *3%'#" (#0#+'" ,+%(" 3+#" *3-'%0(%" (*;3*&-03#29s" #$*(" -+''%()+3,(" #+" 03" He" #*4%" +8"
0))'+F5"tP$PJM"@ "Z"h"t4A5
"" H329"#$%"$%0#*3;"+8"#$%"1*3,*3;!"1$*-$"-+''%()+3,("#+"#$%"$%0#*3;"+8"0"(*4)2%".+,9
" @(%%"-$0)#%'"V5JA!"$0("#+".%"#0>%3"*3#+"0--+:3#5
Temperature T
140
!
120
TW,!
TP? = TO
100
Rth1
80
≤ 0.1 !s
60
"
Winding
10
100
Time t
1000
Rth1 · RTA · I mot2
1#$#%Cu· Rth1· RTA· I mot2
TA
0
1
!"W =
Rth2
Temperature
difference
20
d<J = RthJ$o$LV
TS,!
Stator
#
40
∆TW
10000
Overload factor K
t:03#*&-0#*+3"+8"#$%"+/%'2+0,
I
Meaning:
K = mot ·
IN
– n"k"J^"Tmax"*("3+#"'%0-$%,",:'*3;"($+'#a#%'4"+)%'0#*+3
– n"v"J^"X*4*#"40F*4:4"He"#*4%"ton
=0F*4:4")%'4*((*.2%"+/%'2+0,"0#";*/%3"He"#*4%"ton
1
K=
1 – exp –
=0F*4:4"He"#*4%"ton 0#";*/%3"+/%'2+0,"80-#+'"E
ton!"!#W $ ln
=0F*4:4"4+#+'"-:''%3#"Imot"0#";*/%3"
+/%'2+0,"80-#+'"E
Imot = K · IN ·
Symbol
Imot"
I N"
E"
LV"
R<O"
RthJ"
"
RthL"
"
T"
TO"
Tmax"
"
ZL"
Name
=+#+'"-:''%3#"
e+4*302"-:''%3#!"4+#+'"@-0#02+;"/02:%A"
H/%'2+0,"80-#+'
q+:2%")+1%'"2+((%("
D*3,*3;"'%(*(#03-%"0#"#%4)%'0#:'%"TO"
6$%'45"'%(*(#03-%!"1*3,*3;"p"$+:(*3;"
@-0#02+;"/02:%A
6$%'45"'%(*(#03-%!"$+:(*3;"p"04.*%3#"
@-0#02+;"/02:%A
6%4)%'0#:'%"
O4.*%3#"#%4)%'0#:'%"
=0F5")%'4*((*.2%"1*3,*3;"#%4)%'0#:'%
@-0#02+;"/02:%A"
SI Symbol
O TJ?"
O T P"
TP?"
D t"
m ton
nPD d< J"
tP"
nPD "
tJ"
g[ "
g[
Symbol
g[ z[:"
Tmax – 25°C
Rth1
·
Tmax – TS
Rth1 + Rth2
ton
!W
K2
K2 – 1
Tmax – TS
R + Rth2
· th1
Tmax – 25 C°
Rth1
Name
SI
K3,"#%4)%'0#:'%!"1*3,*3;"
g[
I#0#+'"#%4)%'0#:'%"
g[
K3,"#%4)%'0#:'%!"(#0#+'""
g[
6*4%"
(
W_"#*4%"
(
6%4)%'0#:'%",*88%'%3-%!"1*3,*3;"–"04.*%3#" n
6$%'45"#*4%"-+3(#03#!"(#0#+'"
@-0#02+;"/02:%A"
(
6$%'45"#*4%"-+3(#03#!"1*3,*3;"
@-0#02+;"/02:%A"
(
Name
Y%(*(#03-%"-+%8&-*%3#!"-+))%'"
Value
M5MMSV"naJ
40F+3"E+'4:20%"B03,.++>
10. Tables
10.1 maxon Conversion Tables
General Information
t:03#*#*%("03,"#$%*'".0(*-":3*#("*3"#$%"
b3#%'30#*+302"I9(#%4"+8"j3*#("@IbA
t:03#*#9
`0(%":3*#
j3*#"(*;3
X%3;#$
=0((
6*4%
K2%-#'*-:''%3#
meter
>*2+;'04
(%-+3,
m
>;
(
ampere
O
6$%'4+,9304*-"
#%4)%'0#:'%
>%2/*3
n
=:2#*)29".9"
R5MQ"
I+:;$#^
4e4
Factors used for …
… conversions:
J"+_" f"L5USWVZLSJS"d"JMaL">;
J"*3" f"L5ZW"d"JMaL m
… gravitational acceleration:
;""
f"V5UMQQZ"4"(aL
"
f"SUQ5MUUZU"*3"(aL
Length
Decimal multiples and fractions of units
\'%&F
O..'%a \+1%'"
O..'%a \+1%'"
\'%&F
/*0#*+3 of ten
/*0#*+3 of ten
,%-055
$%-#+55
>*2+55
4%;055
;*;055
#%'055
,0
h
>
=
G
6
,%-*55
-%3#*55
4*22*55"
4*-'+55
303+55
)*-+55
,
m
m
n
p
Moment of inertia
`"
O +_a*3L
+_a*3a(L
2.a*3L
2.a*3a(L e4(Lf>;4L 4e4"(L ;-4L
;"-4L
JUL5V R5MQdJMW L5VSdJMS J5JSdJM6
JdJMR
JdJMW
J
>;4Lfe4(L J5USdJMaZ R5MQdJMaS L5VSdJMaW M5JJS
J
JdJMaS
JdJMaR
+_a*3L
J
SUQ5MU
JQ
Q5JUdJMS Z5WQdJMW
ZW5Q Z5WQdJMaS
J
2.a*3L
PJQ
LW5JSM
J
SUQ5MU S5WJdJMS
S5WJ S5WJdJMaW
Mass
4"w>;x Force
O +_
2.8 e
>)
`"
O +_
2.
;'"@;'0*3A
>;
g
`
J
JdJMaS e M5LRU W5WWU J V5UMR
>;
LU5SZdJMaS M5WZW QW5RVdJMaQ
S
aS
S
g
LU5SZ M5WZWdJM QW5RVdJM JdJM
J
>) M5MLU M5WZW M5JML J
+_
J
JQ
L5LUdJMaS SZ5LR SZ5LRdJMS +_ J
JQ S5QMM SZ5LR
J
J
2.
PJQ
J
PRMMM
L5LMZ L5LMZdJMS 2.8 JPJQ J M5LLZ L5LMZ
;'"@;'0*3A WSR5Z
RMMM
J
JZ5WSdJMS JZ5WSdJM6 ),2 L5MJJ SL5JR R5LSS RM5VS
… derived units:
J"9," f"S"8#"f"SQ"*3
J"2."" f"JQ"+_"f"RMMM";'"@;'0*3(A
J">)" f"J">;"d"V5UMQQZ"4(aL
J"e"" f"J">;4(aL
J"D"" f"J"e4(aJ"f"J">;4L(aS
J"q"" f"J"e4(aJ"f"J"D(
JMJ
JML
JMS
JM6
JM9
JMJL
JMaJ
JMaL
JMaS
JMaQ
JMaV
JMaJL
`
m
-4
mm
in
ft
O
in
LZ5WdJMaS
L5ZW
LZ5W
J
J
PJL
Angular velocity
`"
O (aJ"f"B_
'0,"(aJ
L#
J
rpm
PQM
ft
M5SMZ
SM5Z
SMZ
JL
J
40F+3"E+'4:20%"B03,.++>"
Temperature
`"
O
n%2/*3
g"[%2(*:(
g"E0$'%3$%*#
9,
M5VJW
VJ5W
VJW
SQ
S
=*2
LZ5WdJMaQ
LZ5WdJMaW
LZ5WdJMaS
JdJMaS
J
PJLdJMaS
m
J
JdJML
JdJMS
SV5SR
S5LUJ
'0,"(aJ
J
SM
P#
`"
O
(aL
'0,"(aL
minaL
J
PSQMM
#
PJUMM
8#a(aJ
M5SMZ
JL
J
8#a')4
Z5MUdJMaS
RLM
QM
4"(aJ
J
SV5SR
S5LUJ
q"w>;"4L]
>)4"(L
V5UMRdJMR
V5UMR
Z5SZdJM5
S5SZdJMW
E"wex
p
V5UMRdJMaS
JdJMaS
SZ5LRdJMaS
L5LMZdJMaS
RM5VSdJMaS
2"w4x
-4
mm
!
M5MJ
JdJMaS
JdJMaQ
J
M5J
JdJMaW
JM
J
JdJMaS
M5SVW S5VWdJMaL S5VWdJMaZ
S5LUJdJMaL S5LUJdJMaS S5LUJdJMaQ
" w(aJ] Angular acceleration
rpm
#
PSM
J
Linear velocity
`"
O *3a(aJ
*3a')4
4"(aJ
L5ZWdJMaL W5LSdJMaW
aJ
*3a(
J
QM
J
8#a(aJ
PJL
5
j3*#(":(%,"*3"
#$%"40F+3"-0#02+;
\"wDx
4e4"')4
J
PQMMMM
J
PQM
L5SQdJMaS
J5LSdJMaZ
J5RMdJMaQ
Torque
="we4x
`"
O +_a*3
8#a2.8 e4"f"D( e-4
4e4
>)4
)-4
aS
aL
aS
aZ
e4
R5MQdJM
J5SZQ
J
JdJM
JdJM
V5UMR V5UMRdJM
4e4
R5MQ J5SZQdJMS JdJMS
JM
J
V5UMRdJMS V5UMRdJMaL
>)4
R5LMdJMaW M5JSU
M5JML M5JMLdJMaL M5JMLdJMaS
J
JdJMaZ
+_a*3
J
JVL
JWJ5Q
J5WJQ
M5JWL J5SVdJMS J5SVdJMaL
J
8#a2.8
PJVL
J
M5RSR M5RSRdJMaL M5RSRdJMaS R5LSS R5LSSdJMaZ
Conversion example
O"""n3+13":3*#
`"""j3*#"(+:;$#
n3+13^"
+_a*3"
Power
`"
O +_a*3a(aJ +_a*3a')4 *3a2.8a(aJ 8#a2.8a(aJ e4"(aJ"f"D mW
>)4"(aJ
Dfe4"(aJ R5MQdJMaS J5JRdJMaW M5JJS
J5SZQ
J
JdJMaS
V5UMR
mW
R5MQ
M5JJR
JJL5V J5SZQdJMS J"d"JMS
J
V5UMRdJMS
J
+_a*3a(aJ
J
PQM
JQ
JVL
JWJ5Q
M5JWL J5SVdJMS
J
J
J
8#a2.8a(aJ
PJVL
PJJZLM
PJL
J
M5RSR M5RSRdJMaS R5LSS
>)4"(aJ
R5LMdJMaW J5LdJMaZ J5JZdJMaL M5JSU
M5JML M5JMLdJMaS
J
(aL
J
L#
'0,"(aL
J
PL#
J
z"w(aL]
')4"(aL
J
PQM
#
PSM
/"w4"(aJ]
-4"(aJ
44"(aJ
m rpm
J
JdJMaL
JdJMaS
PQM
SV5SRdJMaL SV5SRdJMaS M5QZQ
aL
aS
S5LUJdJM S5LUJdJM Z5WQdJMaL
6"wnx
g"E0$'%3$%*#
@gE"aSMZ5JZA"P"J5U
@gE"aSLA"P"J5U
J
g"[%2(*:(
{"LRS5JZ
J
J5Ug["{"SL
n%2/*3
J
aLRS5JZ
J5U"n"{"SMZ5JZ
ZS
OP5;+ <=3$&'.+&)",%&$"*(0+),+,#$&($)*+,)#+#)..$*D1+0('($&+'*/+Q$*"($&+,#$&($)*
Type of friction
Friction condition
Description
I+2*,a#+a(+2*,"8'*-#*+3"
@,'9">*3%#*-"8'*-#*+3A
]*'%-#"-+3#0-#".%#1%%3"#$%"
8'*-#*+3")0'#3%'(
I)%-*02"-0(%"+8"(+2*,a#+a
`+:3,0'9"8'*-#*+3"@2:.'*-0#%,"
(+2*,"8'*-#*+3"1*#$"0,(+'.%,"
>*3%#*-"8'*-#*+3A
2:.'*-03#"+3"#$%"(:'80-%(
n*3%#*-"8'*-#*+3
=*F%,"8'*-#*+3
I+2*,a#+a(+2*,"8'*-#*+3"03,"
i:*,"8'*-#*+3"-+4.*3%,"3%F#"
#+"%0-$"+#$%'
E2:*,"8'*-#*+3
E'*-#*+3")0'#3%'("0'%"
-+4)2%#%29"(%)0'0#%,"8'+4"
%0-$"+#$%'".9"0"&24"+8"i:*,"
@)'+,:-%,"$9,'+(#0#*-0229"+'"
$9,'+,9304*-0229A"
G0("8'*-#*+3
E'*-#*+3")0'#3%'("0'%"
-+4)2%#%29"(%)0'0#%,"8'+4"
%0-$"+#$%'".9"0";0("&24"
@)'+,:-%,"0%'+(#0#*-0229"+'"
0%'+,9304*-0229A"
LM"l"JMMc"$*;$%'"#$03"
>*3%#*-"8'*-#*+3
I#0#*-"8'*-#*+3
Y+22*3;"8'*-#*+3
Y+22*3;"8'*-#*+3
ZW"
`+,*%("(%)0'0#%,".9"
2:.'*-0#%,"'+22%'".%0'*3;(
[+4.*3%,"'+22*3;"03,"(2*,*3;" Y+22*3;"8'*-#*+3"1*#$"0"
8'*-#*+3
>*3%#*-"-+4)+3%3#"@(2*)A
40F+3"E+'4:20%"B03,.++>
<=3$&'.+&)",%&$"*(+),+,#$&($)*
M5J"l"J
M5J"l"M5L
Examples
@)",%&$"*(+),+,#$&($)*
I*3#%'%,".'+3_%"p"I#%%2
M5JZ"l"M5S
\20(#*-"p"G'09"-0(#"*'+3
M5S"l"M5W
I#%%2"p"I#%%2
M5W"l"M5R
e*#'*,%,"(#%%2"p"e*#'*,%,"(#%%2
M5S"l"M5W
[+))%'"p"[+))%'
M5Q"l"J5M
[$'+4*:4"p"[$'+4*:4
M5WJ
O2"022+9"p"O2"022+9
M5JZ"l"M5Q
I#%%2"p"I#%%2
M5J
I2%%/%".%0'*3;!"2:.'*-0#%,!"0#"2+1"()%%,("+8"'+#0#*+3"
M5MJ"l"M5J
M5MMJ"l"M5MJ
I*3#%'%,".'+3_%"p"I#%%2
M5MZ"l"M5J
I*3#%'%,".'+3_%"p"I#%%2
M5MR"l"M5J
6%4)%'%,"(#%%2"p"6%4)%'%,"(#%%2
M5MZ"l"M5MU
I*3#%'%,"(2%%/%".%0'*3;!"2:.'*-0#%,!"0#"$*;$"()%%,("+8"'+#0#*+3"
03,"2+1"'0,*02"2+0,
M5MMMJ
M5J"l"J5L
I#%%2"p"I#%%2",'9
M5W"l"M5U
I#%%2"p"I#%%2"2:.'*-0#%,
M5MU"l"M5JL
I*3#%'%,".'+3_%"p"I#%%2",'9
M5L"l"M5W
I*3#%'%,".'+3_%"p"I#%%2"2:.'*-0#%, M5JL"l"M5JW
M5MMJ"l"M5MMZ
\20(#*-"p"G'09"-0(#"*'+3!",'9
M5S"l"M5Z
`022".%0'*3;(
M5MMJ"l"M5MMLZ
M5MMJ"l"M5J
40F+3"E+'4:20%"B03,.++>"
ZZ
11. Symbol list for the Formulae Handbook
Name
O--%2%'0#*+3
O--%2%'0#*+3"8+'-%
O--%2%'0#*+3"8+'-%!"J(#PL3,"$028"-9-2%
O--%2%'0#*+3"#*4%
O--%2%'0#*+3"#*4%"
O4.*%3#"#%4)%'0#:'%"
O3;2%"+8"'+#0#*+3"
O3;2%"+8"#$%"*3-2*3%,")203%"
O3;:20'"0--%2%'0#*+3"
O3;:20'"8'%?:%3-9"
O3;:20'"/%2+-*#9"P"O3;:20'"/%2+-*#9"@-$03;%A
O3;:20'"/%2+-*#9"08#%'P.%8+'%"0--%2%'0#*+3
O3;:20'"/%2+-*#9!"*3):#"P"2+0,
O/%'0;%"%3,"#%4)%'0#:'%!"1*3,*3;"
`%0'*3;"2+0,!"0F*02"P"'0,*02"
[0)0-*#03-%"
[+%8&-*%3#"+8"8'*-#*+3"@(%%"#0.2%"-$0)#5"JM5LA
[+4)'%((*/%"8+'-%"
[+:3#(")%'"#:'3!"[\6
['+(("(%-#*+3
[:''%3#"
[:''%3#"-$03;%"
[:''%3#",:'*3;"He")$0(%"
[:''%3#"'*))2%!")%0>a#+a)%0>"
[:''%3#"#$'+:;$"'%(*(#+'"RL
[:#a+88"8'%?:%3-9"
]%3(*#9
]*04%#%'!",%i%-#+'"):22%9"L"
]*04%#%'!",%i%-#+'"):22%9"X
]*04%#%'!",'*/%"):22%9"
]*04%#%'!",'*/%"1$%%2"
]*04%#%'!"2+0,"):22%9"
]*()20-%4%3#
]*(#03-%"
]*(#03-%"+8"0F*("s"8'+4"-%3#%'"+8";'0/*#9"P
]+13$*22a(2+)%"8+'-%"
]'+)"$%*;$#"
]:'0#*+3"
]:'0#*+3"+8"+)%'0#*3;")+*3#("J...n
K--%3#'*-*#9
K,,9"-:''%3#")+1%'"2+((%(
K8&-*%3-9
K2%-#'*-"-$0';%
K2%-#'*-02"-0)0-*#03-%
K2%-#'*-02"*3):#")+1%'
K2%-#'*-02"'%(*(#03-%
K2%-#'*-02"#*4%"-+3(#03#
K2%-#'+4+#*/%"8+'-%
K3,"#%4)%'0#:'%
K3,"#%4)%'0#:'%!"(#0#+'"P"1*3,*3;
K?:*/02%3#"'%(*(#03-%
K?:*/02%3#"'%(*(#03-%"+8"RL"03,"RL
E+'-%"
E'%?:%3-9"
E'*-#*+3"8+'-%"
E'*-#*+3")+1%'"2+((%("
E'*-#*+3"#+'?:%"
G%0'$%0,"%8&-*%3-9
G%0'$%0,"#%4)%'0#:'%"
G'0/*#0#*+302"0--%2%'0#*+3"
G'+:3,
B%0#"-0)0-*#9"
B%0#"-0)0-*#9";%0'$%0,"P"(#0#+'"P"1*3,*3;
B%*;$#"
b4)%,03-%"
b3,:-%,"/+2#0;%"
b3,:-#03-%
b3,:-#03-%!"0,,*#*+302"%F#%'302"4+#+'"-$+>%
b3,:-#03-%!".:*2#a*3"-$+>%"-+3#'+22%'
b33%'"'0,*:("
b33%'"'%(*(#03-%!"/+2#0;%"(+:'-%"
b3):#"()%%,"
b3):#"#+'?:%
b3):#"/+2#0;%"
b3#%'4*##%3#29")%'4*((*.2%"#+'?:%!";%0'$%0,"@-0#02+;"/02:%A
q+:2%")+1%'"2+(("
X%3;#$"
X%3;#$"+8"(*,%"a"P"b"P"c
X+0,"-:''%3#"
X+0,"8+'-%"@+:#):#A"
X+0,"8+'-%!"J(#"P"L3,"$028"-9-2%
X+0,"'%(*(#03-%"
X+0,"()%%,
X+0,"#+'?:%"
56"
Symbol
a
Fa
FaJ / FaL
d!a
d!
TO
i$^$di
b
b
l
l$^$l?$dl$^$dl
lend$^$lstart
lin$^$lL
TJ?.(
FEk
H
c
Fp
N
O
I
{i
Ion
d-LL
IRL
fH
m
dL
dX
dJ
d
dL
dl
)?$d)$^$d)
rs
FH
h
d!
tJ…n
e
LV,eddy
q
~
HJ$^$HL
Lel
R / RJ / RL
tel
XTE
Tend
TP? / TJ?
R
Rx
F
f
FR
LV,R
TR
qM
TM
g
M_C
Hth
H!"?M$^$H!"?P$^$H!"?J
h
Z
Dind
L
Lext
Lint
ri
Ri
nin
Tin
Din
TM?+.@
LV
l
a"P"b"P"c
IL
FL
FLJ / FLL
RL
nL
TL
Unit
4P(L
e
e
(
(
g[
'0,
g
'0,P(L
'0,P(
'0,P(
'0,P(
'0,P(
g[
e
E
e
mL
O
O
O
O
O
B_
>;P4S
m
m
m
m
m
m
m
m
e
m
(
(
m
W
[
E
W
m
(
T
g[
g[
m
m
e
B_
e
W
e4
g[
4P(L
T
qPn
qPn
m
m
T
B
B
B
m
m
rpm
e4
T
e4
W
m
m
O
e
e
m
rpm
e4
Page number
V!"JW
V!"LW
LW
LL!"LS!"LW!"LZ
WJ
WU!"WV!"ZM!"ZJ!"ZL
JJ!"JZ!"JU!"JV!"LW
9
JJ!"JZ!"WJ
SS
JJ!"JZ!"LJ
JZ
LJ
ZJ
JJ
SM!"SS!"SW
V!"JJ
9
WW
V!"JS
LV!"SS!"SW!"WU!"ZJ
WM
ZJ
WQ
SL
SW
JL!"JS
LL
LL
LL!"LZ
LS
LZ
9
JW!"JQ!"JR
JS
9
JW
V!"JJ
WL
LW
WR
LJ!"LL!"LS!"LW!"LZ!"WM!"WR
WU
WU
SU
LV!"SM!"SS!"SW!"WU
SM
WM
WU
WV!"ZJ!"ZL
SJ!"SL
SL
V!"JJ!"LJ
SS!"SW
9
WR
JJ!"SV!"WM!"WJ
WR
WV
V!"JW
WU
WR
WR!"WU
JL!"JS
SS
SV!"WM
SM!"SS!"SW
WQ
WQ
JL!"JS
LV
LL!"LS!"LW!"LZ
LJ!"LL!"LS!"LZ
SM!"SW
LQ
SU!"WR!"WV!"ZL
JS
JS
SL
JM!"LJ!"LL!"LS
LW
LV!"SL
LZ!"WJ!"WZ!"WR
JJ!"LJ!"LZ!"WJ!"WZ!"WR
40F+3"E+'4:20%"B03,.++>
Name
X+0,"/%2+-*#9
X+0,"/+2#0;%
=0(("
=0(("+8"#$%"2+0,
=0((!".%2#"
=0((!".%2#"
=0((!";%0'"'0->"
=0((!";%0'$%0,"
=0((!"4+#+'"
=0((!"'+/%'"
=0((!"()*3,2%"
=0((!"1*3,*3;"
=0F*4:4"0--%2%'0#*+3
=0F*4:4"03;:20'"0--%2%'0#*+3"
=0F*4:4"-+3#*3:+:("#+'?:%!";%0'$%0,"@-0#02+;"/02:%A
=0F*4:4"-:''%3#"'*))2%!")%0>a#+a)%0>
=0F*4:4"%8&-*%3-9"0#"DN"@-0#02+;"/02:%A
=0F*4:4"*3):#"()%%,"
=0F*4:4"2+0,"()%%,"
=0F*4:4")%'4*((*.2%"1*3,*3;"#%4)%'0#:'%"@-0#02+;"/02:%A
=0F*4:4")+1%'
=0F*4:4"()%%,"*3"2+0,"-9-2%
=0F*4:4"#%4)%'0#:'%"-$03;%"
=0F*4:4"#+'?:%"*3"2+0,"-9-2%
=0F*4:4"/%2+-*#9"
=0F*4:4"/+2#0;%",'+)"+8"#$%"-+3#'+22%'"
=%03",*04%#%'".%0'*3;"
=%0(:'%4%3#"'%(+2:#*+3"
=%0(:'%4%3#"'%(+2:#*+3!"4+#+'"()%%,
=%-$03*-02"*3):#")+1%'"
=%-$03*-02"+:#):#")+1%'"
=%-$03*-02")209!"*3):#"
=%-$03*-02")209!"+:#):#"
=%-$03*-02")+1%'"
=%-$03*-02"#*4%"-+3(#03#"@-0#02+;"/02:%A
=%-$03*-02"#*4%"-+3(#03#"1*#$"0,,*#*+302"VL
=+4%3#"+8"*3%'#*0"
=+4%3#"+8"*3%'#*0"1*#$"'%8%'%3-%"#+"#$%"0F*("s"#$'+:;$"#$%"-%3#%'"+8";'0/*#9"P
=+4%3#"+8"*3%'#*0"1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("x
=+4%3#"+8"*3%'#*0"1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("y
=+4%3#"+8"*3%'#*0"1*#$"'%8%'%3-%"#+"#$%"'+#0#*+3"0F*("S
=+4%3#"+8"*3%'#*0!"022"1$%%2("#+;%#$%'
=+4%3#"+8"*3%'#*0!",%i%-#+'"):22%9"L"P"X
=+4%3#"+8"*3%'#*0!",'*/*3;"%3,"
=+4%3#"+8"*3%'#*0!"%--%3#'*-",*(-"
=+4%3#"+8"*3%'#*0!";%0'$%0,"#'03(8+'4%,
=+4%3#"+8"*3%'#*0!"*3):#"@4+#+'!"%3-+,%'!".'0>%A"
=+4%3#"+8"*3%'#*0!"2+0,"
=+4%3#"+8"*3%'#*0!"+:#):#"
=+4%3#"+8"*3%'#*0!")*3*+3"
=+4%3#"+8"*3%'#*0!"'+#+'"@-0#02+;"/02:%A
=+4%3#"+8"*3%'#*0!"()*3,2%"
=+#+'"-:''%3#"
=+#+'"()%%,"
=+#+'"#+'?:%
=+#+'"/+2#0;%
e+"2+0,"-:''%3#"
e+"2+0,"()%%,"
e+"2+0,"()%%,"+8"4+#+'"0#"DN"@-0#02+;"/02:%A
e+4*302"-:''%3#"0("0"8:3-#*+3"+8"TO
e+4*302"-:''%3#!"4+#+'"@-0#02+;"/02:%A"
e+4*302"()%%,!"4+#+'"@-0#02+;"/02:%A"
e+4*302"#+'?:%!"4+#+'"@-0#02+;"/02:%A"
e+4*302"/+2#0;%!"4+#+'"@-0#02+;"/02:%A
e+'402"8+'-%"@8+'-%")%')%3,*-:20'"#+"#$%"(:'80-%"+8"-+3#0-#A"
e:4.%'"+8"#%%#$!"*3#%'302";%0'"P")*3*+3"P"(:3"1$%%2
HEE"#*4%"
He"#*4%"
H:#%'"'0,*:("
H:#):#"-:''%3#
H:#):#"/+2#0;%"
H/%'2+0,"80-#+'
\0'#*02"-:''%3#("
\0'#*02"8+'-%(
\0'#*02"'%(*(#03-%("
\0'#*02"#+'?:%("
\0'#*02"/+2#0;%("
\%'*+,
\%'*+,*-"0--%2%'0#*+3"8+'-%"0("0"8:3-#*+3"+8"#$%"03;2%"+8"'+#0#*+3"
\$0(%"($*8#
\*#-$"
\+*3#"J"P"L"+3"#$%"xa0F*("
\+(*#*+3"'%(+2:#*+3
\+#%3#*+4%#%'")+(*#*+3"
\+1%'"
\+1%'"2+((%("P")+1%'"2+((%(!";%0'$%0,
40F+3"E+'4:20%"B03,.++>"
Symbol
vL
DL
m
mL
mN
mR
mZ
mM
mmot
mF
mP
mJ
amax
bmax
TM?519!
d-LL?+.@
qmax
nmax,in
nmax,L
Tmax
Lmax
nmax
d<max
Tmax
vmax
dDmax
rEk
d~
d9
Lmech,in
LL$^$Lmech,L
diin
d)L$^$diL
Lmech
tm
tm‘
V
Vs
Vx
Vy
VS
VJ
VL$^$VX
VJ
VX
VM
Vin
VL
VL
VL
VR
VP
Imot
nmot
Tmot
Dmot
IM
nM
nM?D_
I_?<O
IN
nN
TN
DN
FN
SS$^$S$^$SJ
toff
ton
ra
Iout
Dout
E
IJ, IL
FJ"/ FL"/ Fx
RJ, RL
TJ"^$TL"^$Tx
DJ?$DL
T
FaIiK
i
p
xJ"/ xL
di
x
L
LV$^$Ls?M
Unit
4P(
T
>;
>;
>;
>;
>;
>;
>;
>;
>;
>;
4P(L
'0,P(L
e4
O
rpm
rpm
g[
W
rpm
n
e4
4P(
T
m
?-P4(
rpm
W
W
'0,
4P'0,
W
(
(
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
>;4L
O
rpm
e4
T
O
rpm
rpm
O
O
rpm
e4
T
e
(
(
m
O
T
O
e
m
e4
T
(
e
g
m
m
g
MlJ
W
W
Page number
LJ!"LL!"LS
SL
V!"JL!"JS!"WR
LL!"LS!"LW
LL
LZ
LS
WR
WR
LS
LL
WR
JQ!"JR
JU!"JV!"WJ
LQ!"WR
WQ
WM
LQ
LQ
ZM!"ZJ!"ZL
LV
JU!"JV!"WL
WU
WL
JQ!"JR
WZ
JJ
WW
WW
LJ
LJ!"SU
LL!"LS!"LZ
LL!"LS!"LZ
LJ
WJ
WJ
JJ
JS
JL!"JS
JL!"JS
JL!"JS
LS
LL!"LZ
LL!"LZ
LW
LZ
LL!"LS!"LW!"LZ
LZ!"WJ
LZ
LS
WJ
LL
SU!"SV!"WM!"WJ!"WL!"WR!"WV!"ZM!"ZL
WR
WR
SU!"SV!"WM!"WL!"WR
SV!"WM!"WL
SU!"SV!"WM!"WJ
WZ
ZM!"ZJ
WQ!"ZM!"ZJ!"ZL
ZM
WL!"ZM
SU!"SV!"WM!"WZ
9
LS!"LZ
ZJ
ZJ!"ZL
JL!"JS
SM
SM!"SW
ZL
SJ
JM
SJ!"SL
JJ
SJ!"SL
SS
LW
SW
LS
JS
WW
SL
LV!"SU
LV!"WR!"WU!"WV!"ZM
ZR
Name
\+1%'"2+((%("8+'"'%/%'(02"+8"40;3%#*_0#*+3"
\'%((:'%"@J"\0"f"J"e"P"4L"f"JMaZ".0'A"
\:22a,+13"'%(*(#03-%"
\:22a:)"'%(*(#03-%"
\D="8'%?:%3-9"
t:0,-+:3#(")%'"):2(%"
Y0,*:("P"Y0,*:("J"P"Y0,*:("L
Y0,*:("-*'-:20'"#+':("0'+:3,"Sa0F*(
Y%0-#03-%!"-0)0-*#*/%"
Y%0-#03-%!"*3,:-#*/%"
Y%,:-#*+3"'0#*+!";%0'$%0,"@-0#02+;"/02:%A
Y%,:-#*+3"'0#*+!"4%-$03*-02",'*/%
Y%?:*'%,"3+"2+0,"()%%,"
Y%?:*'%,"()%%,"-+3(#03#
Y%(*(#03-%"0#"#%4)%'0#:'%"T
Y%(*(#03-%"-+%8&-*%3#!"-+))%'"
Y%(*(#03-%!")+#%3#*+4%#%'"
Y=I"-:''%3#
Y=I"#+'?:%
I*3:(+*,02"/%2+-*#9"-:'/%"+8"#$%"2+0,"
I+:'-%"/+2#0;%"
I)%-*&-"$%0#"-0)0-*#9
I)%-*&-"$%0#"-0)0-*#9"-+))%'
I)%-*&-"$%0#"-0)0-*#9"*'+3
I)%%,"P"#+'?:%";'0,*%3#!"4+#+'"@-0#02+;"/02:%A
I)%%,"08#%'"0--%2%'0#*+3"
I)%%,".%8+'%"0--%2%'0#*+3"
I)%%,"-$03;%"
I)%%,"-$03;%!"*3):#"
I)%%,"-+3(#03#"@-0#02+;"/02:%A
I)%%,"+8"'+#0#*+3"P"I)%%,"+8"'+#0#*+3"@-$03;%A
I)*3,2%"2%0,"@)*#-$A
I)'*3;"-+3(#03#"
I)'*3;"8+'-%"
I#022"#+'?:%
I#022"#+'?:%"0#"#%4)%'0#:'%"TJ
I#03,("8+'"XH or XL
I#0'#*3;"-:''%3#"
I#0'#*3;"-:''%3#"0#"#%4)%'0#:'%"TJ
I#0#+'"#%4)%'0#:'%"
I#+'%,"$%0#"
I:))29"/+2#0;%"
I:))29"/+2#0;%"
6%4)%'0#:'%
6%4)%'0#:'%"0#"(#0'#"
6%4)%'0#:'%"-$03;%"0("0"8:3-#*+3"+8"#*4%"t
6%4)%'0#:'%",*88%'%3-%"
6%4)%'0#:'%",*88%'%3-%!";%0'$%0,"p"04.*%3#
6%4)%'0#:'%",*88%'%3-%!"(#0#+'"p"04.*%3#
6%4)%'0#:'%",*88%'%3-%!"1*3,*3;"p"04.*%3#
6%'4*302"*3,:-#03-%!"4+#+'"@-0#02+;"/02:%A
6%'4*302"'%(*(#03-%!"4+#+'"@-0#02+;"/02:%A
6%'4*302"/+2#0;%"
6$%'45"'%(*(#03-%!";%0'$%0,"p"04.*%3#"
6$%'45"'%(*(#03-%!"$+:(*3;"p"04.*%3#"@-0#02+;"/02:%A
6$%'45"'%(*(#03-%!"$+:(*3;"p"04.*%3#"4+,*&%,
6$%'45"'%(*(#03-%!"1*3,*3;"p"$+:(*3;"@-0#02+;"/02:%A
6$%'45"#*4%"-+3(#03#!"(#0#+'"P"1*3,*3;"@-0#02+;"/02:%A
6$%'402"#*4%"-+3(#03#"
6*4%"P"6*4%!",:'0#*+3
6*4%"a / b / c
6*4%"-$03;%"
6+'?:%"
6+'?:%"0#"+)%'0#*3;")+*3#("J...n
6+'?:%"-+3(#03#"@-0#02+;"/02:%A
6+'?:%"8+'"0--%2%'0#*+3
6+'?:%"8+'"'%/%'(02"+8"40;3%#*_0#*+3
6+'?:%!"J(#"P"L3,"$028"-9-2%
6+'?:%!"()*'02"()'*3;"
6+'(*+3"-+%8&-*%3#"@()'*3;"-+3(#03#A"
6+#02"-:''%3#"
6+#02"*3,:-#03-%"
6+#02"#*4%"
6+#02"#*4%!"+)%'0#*3;"-9-2%"
6+#02"/+2#0;%"
T%2+-*#9"P"T%2+-*#9"@-$03;%A
T%2+-*#9"08#%'"0--%2%'0#*+3"
T%2+-*#9".%8+'%"0--%2%'0#*+3"
T+2#0;%
T+2#0;%"+/%'"-0)0-*#03-%P*3,:-#03-%P'%(*(#03-%
T+2#0;%!")+#%3#*02",*88%'%3-%
D%*;$#"+8"0".+,9"
D*3,*3;"'%(*(#03-%"0#"-:''%3#"#%4)%'0#:'%"TJ
D*3,*3;"'%(*(#03-%"1*3,*3;"0#"#%4)%'0#:'%"TO
D*3,*3;"#%4)%'0#:'%"
ZU"
Symbol
LV,magn
p
Rd
Ru
fLJT
~$[$W
r / rJ / rL
R
XH
XL
iM
i
nM,theor
kn,theor
RT
bH0
RM
IUTP
T'9?UTP$^$TUTP
vLI!K
DM
c
cH0
cFe
d9$^$dT
nend
nstart
d9
d9in
kn
9$^$9?$d9
p
k
FP
TH
THT
X
IO
IO<
TP
~
+V
VHH
T
Tstart
d<I!K
d<
d<M
d<P
d<J
Lmot
Rmot
Dkl
R!"?M
RthL
RthL,mod
RthJ
tP$^$tJ
tth
!$^$!?$d!
d!a$^$d!b$^$d!c
{!
T
TJ...n
kT
T'9?b$^$Tb
Tmagn
TinJIiK$^$TinLIiK
TP
km
I
Ltot
d!tot
ttot
D
($^$(?$d($^$d(
vend
vstart
D
DH$^$DL ^$DR
DJ ^$DL
FM
R<J
R<O
TJ
Page number
WR
9
SM
SM
WQ
WW
JJ!"JL
JL
SS!"SW
SS!"SW
LZ!"LQ
WW
rpm
WL
')4PT
WL
m
SL
M5MMSV"naJ
SL!"WR!"WV!"ZM!"ZJ!"ZL
m
SL
O
ZJ
e4
LW!"WL
4P(
LW
T
LV
qP@>;nA
WR
SUM"qP@>;nA
WR
WZM"y"WRM"qP@>;nA WR
')4P4e4
SV!"WM!"WL!"WZ
rpm
JZ
JZ
rpm
rpm
JJ!"WJ
rpm
LL!"LS!"LW!"LZ
')4PT
SV!"WM!"WL
rpm
JZ!"LJ!"SU"!SV!"WM!"WJ!"WL!"WZ!"WR!"ZM
m
LL
eP4
9
e
9
e4
SU!"SV!"WM!"WJ!"WL
e4
WR
m
SS
O
SV!"WM
O
WR
g[
WU!"WV!"ZM!"ZL
J
WR!"WU
T
SM
T
WZ!"WQ
g[
WR!"WU!"WV!"ZJ!"ZL
g[
WU
n
WU
n
SL!"WR
n
WV
n
WU!"WV!"ZM!"ZJ
n
WU!"WV!"ZJ!"ZL
B
WM!"WQ
m
SL!"SU!"SV!"WM!"WJ!"WR
T
LV
nPD
WV
nPD
WU!"WV!"ZM!"ZJ!"ZL
nPD
ZM
nPD
WU!"WV!"ZM!"ZJ!"ZL
(
WV!"ZL
(
WU
(
JW!"JZ!"LW!"SM!"SS!"WJ!"WR!"WU!"WV!"ZJ!"ZL
(
JQ!"JU
(
WM
e4
JJ!"LJ!"SU!"SV!"WM!"WJ!"WL!"WZ!"WR!"ZM
e4
WL
e4PO
SV!"WM!"WJ!"WL!"WR
e4
JJ!"LL!"LS!"LW!"LZ
e4
WR
e4
LW
e4
JJ
e4
JJ
O
SJ!"SL
B
WQ
(
JQ!"JR!"JU!"JV
(
WL
T
SJ!"SL
4P(
V!"JW!"LJ
4P(
JW
4P(
JW
T
LV!"SS
T
SW
T
WU
e
9
m
WR
m
WV!"ZM!"ZJ!"ZL
g[
WR!"WU!"WV!"ZM
Unit
W
\0
m
m
B_
?-Pb=\
m
m
m
m
40F+3"E+'4:20%"B03,.++>
academy.maxonmotor.ch