APPENDIX 1 WORKING PRINCIPLE OF GENETIC ALGORITHM
advertisement

89
APPENDIX 1
WORKING PRINCIPLE OF GENETIC ALGORITHM
In the genetic algorithm a solution, i.e., a point in the search space
is represented by a finite sequence of zero’s and ones, called a chromosome.
First, a population of strings representing the decision variables is randomly
generated. The size of the population depends on the string length and the
problem being optimized. Each string is then evaluated using the objective
function value. In GA terminology, the objective function value of a string is
known as the “fitness” of the string. This evaluation function acts as a pseudo
objective function, since it is a raw measure of the solution value. For
constrained optimization problems, the evaluation function typically
comprises a weighted sum of the objective and penalty functions to consider
the constraints. This approach allows constraints to be violated, but a penalty
depending on the magnitude of the violation is incurred. A highly infeasible
individual has a high penalty value and will rarely be selected for next
generation, allowing the GA to concentrate on feasible or near-feasible
solutions. Once the strings are evaluated, the three genetic operatorsreproduction, crossover and mutation are applied to create a new population.
Pseudo-code of working of GAs
Initialize a population of strings at random
Evaluate each string in the population
Repeat
Reproduction
90
Crossover
Mutation
Evaluation of the population
Until (termination criterion)
A1.1
Reproduction
The selection of individuals to produce successive generations
plays an important role in GA. Reproduction comprises forming a new
population, usually with the same total number of chromosome, by selection
from members of the current population, following a particular scheme. The
higher the fitness, the more likely it is that the chromosome will be selected
for the next generation. There are several strategies for selecting the
individuals (e.g) roulette wheel selection, ranking methods and tournament
selection.
In tournament selection, n individuals are selected in random from
the population, and the best of the n is inserted into the new population for
further genetic processing. This procedure is repeated until the mating pool is
filled. Tournaments are often held between pairs of individuals (n=2),
although larger tournaments can be used.
Though this scheme selects good individuals for the next
generation, it can not guarantee that the best solution obtained survives
through out the optimization process. In other words, the best solution
obtained from the GA may not be included in the final solutions, which are
clustered towards a solution. To avoid this, the GA is modified such that once
an individual with highest fitness among the current generation is found; it
will be kept unchanged into the next generation. This process is called
“elitism”.
91
A1.2
CROSSOVER OPERATION
After the reproduction phase is over, the population is enriched
with good strings. Reproduction makes copies of good strings, but does not
create any new string. A cross over operator is used to recombine with the
hope of creating a better string. An overall crossover probability is assigned to
the crossover process, which is the probability that given two parents, the
crossover process will occur. This probability is often in the range of 0.6 to
0.9. The method of crossover used in GA is BLX-
crossover which is
explained in chapter 2.5.3.2.
A1.3
MUTATION
Mutation acts as a background operator and it is used to search the
unexplored search space by randomly changing the values at one or more
positions of the selected chromosome. This is often carried out with a
constant probability between 0.001 to 0.01 for each element in the population.
In this thesis, non-uniform mutation operator is applied to the mixed variables
with some modifications. After mutation, the new generation is complete and
the procedure begins again with the fitness evaluation of the population.
Stopping Criteria
These are the conditions under which the search process will
terminate. In this study, the search will terminate if one of the following
criteria is satisfied: the number of iterations since the last of the best solution
is greater than a pre-specified number; or the number of iterations reaches the
maximum allowable number.
92
APPENDIX 2
MULTI-OBJECTIVE OPTIMIZATION PROBLEM
A general multi-objective design problem is expressed by
equation (A 2.1)
Min F ( x)
[ f1 ( x), f 2 ( x),..... f k ( x)]
(A 2.1)
Subject to x S
x=(x1,x2,…xn)T
where
f1(x), f2(x )….. fk( x) are the k objective functions , (x1,x2,….xn) are
the n optimization parameters, and S Rn is the solution or parameter space.
Obtainable objective vectors, {F(x)| x S} , are denoted by Y, so S is mapped
by F onto Y. Y Rk is usually referred to as the attribute or criteria space,
where Y is the boundary of Y. For a general design problem, F is non-linear
and multi-modal, and S might be defined by non-linear constraints and may
contain both continuous and discrete member variables. f1* , f 2* ,......., f k* will be
used to denote the individual minima of each objective function respectively.
The utopian solution is defined as F *
f1* , f 2* ,......., f k* .
As F* minimizes all objectives simultaneously, it is an ideal
solution, however it is rarely feasible. In this formulation, minimize F(x),
lacks clear meaning as the set {F(x)} for all feasible x lacks a natural
ordering, whenever F(x) is vector-valued. In order to determine whether F(x1)
93
is better then F(x2), and thereby order the set {F(x)}, the subjective judgment
from a decision-maker is needed. One property commonly considered as
necessary for any candidate solution to the multi-objective problem is that the
solution is not dominated. Considering a minimization problem and two
solution vectors x, y S. x is said to dominate y, denoted x > y, if:
i
1,2,...k : f1 ( x)
f1 ( y )
and
j
1,2,.....k : f j ( x)
f j ( y)
The Pareto subset of Y contains all non-dominated solutions. The
space in Rk formed by the objective vectors of Pareto optimal solutions is
known as the Pareto optimal front, P.
If the final solution is selected from the set of Pareto optimal
solutions, there would not exist any solutions that are better in all attributes. It
is clear that any final design solution should preferably be a member of the
Pareto optimal set. If the solution is not in the Pareto optimal set, it could be
improved without degeneration in any of the objectives, and thus it is not a
rational choice. This is true as long as the selection is done based on the
objectives only. Pareto optimal solutions are also known as non-dominated or
efficient solutions. Figure A2.1 provides a visualization of the presented
nomenclature.
94
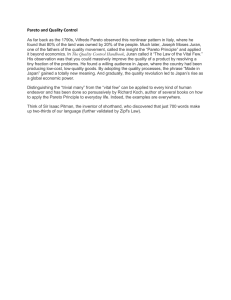
Figure A2.1 Solution and attribute space nomenclature for a problem
with two design variables (x1 and x2) and two objectives
(f1 and f2), which should both be minimized
Solution and attribute space nomenclature for a problem with two
design variables (x1 and x2) and two objectives (f1 and f2), which should both
be minimized. The attribute space, Y, looks the same regardless of how the
objectives are aggregated to an overall objective function. Depending on how
the overall objective function is formulated, the optimization will result in
different points on the Pareto front.
95
APPENDIX 3
Table A3.1 Line Data for IEEE 30-bus System
Line
From Bus To Bus
Number Number Number
R
X
Line
flow
Limit
Line Impedance
1
1
2
0.0192
0.0575
130
2
1
3
0.0452
0.1852
130
3
2
4
0.0570
0.1737
65
4
2
5
0.0472
0.1983
130
5
2
6
0.0581
0.1763
65
6
3
4
0.0132
0.0379
130
7
4
6
0.0119
0.0414
90
8
4
12
0.0000
0.2360
65
9
5
7
0.0460
0.1160
70
10
6
7
0.0267
0.0820
130
11
6
8
0.0120
0.0420
32
12
6
9
0.2080
0.2080
65
13
6
10
0.5560
0.5560
32
14
6
28
0.0599
0.0599
32
15
8
28
0.2000
0.2000
32
16
9
11
0.0000
0.2080
65
17
9
10
0.0000
0.1100
65
18
10
20
0.0936
0.2090
32
19
10
17
0.0324
0.0845
32
20
10
21
0.0348
0.0749
32
21
10
22
0.0727
0.1499
32
22
12
13
0.0000
0.1400
65
23
12
14
0.1231
0.2559
32
96
Table A3.1 (Continued)
Line Impedance
Line
Line
From Bus
To Bus
Number
Number
Number
R
X
24
12
15
0.0662
0.1304
32
25
12
16
0.0945
0.1987
32
26
14
15
0.2210
0.1997
16
27
15
18
0.1070
0.2185
16
28
15
23
0.1000
0.2020
16
29
16
17
0.0824
0.1932
16
30
18
19
0.0639
0.1292
16
31
19
20
0.0340
0.0680
32
32
21
22
0.0116
0.0236
32
33
22
24
0.1150
0.1790
16
34
23
24
0.1320
0.2700
16
35
24
25
0.1885
0.3292
16
36
25
26
0.2544
0.3800
16
37
25
27
0.1093
0.2087
16
38
27
29
0.2198
0.4153
16
39
27
30
0.3202
0.6027
16
40
28
27
0.0000
0.3960
65
41
29
30
0.2399
0.4333
16
flow
Limit
97
Table A3.2 Generator data for IEEE 30-bus system
Bus data
Pg
min
Pg
max
Qg
min
Sg
max
1
50
200
-20
250
2
20
80
-20
100
5
15
50
-15
80
8
10
35
-15
60
11
10
30
-10
50
13
12
40
-15
60
Table A3.3 Generator cost data and ramp rate operating limits
F(PG ) PG3 bi PG2 ci PG d i
Ramp Rate
(MW/30min)
Bus data
ai
bi
ci
di
Up
Down
1
0.0010
0.092
14.5
-136
15
20
2
0.0004
0.025
22
-3.5
10
15
5
0.0006
0.075
23
-81
6
10
8
0.0002
0.1
13.5
-14.5
4
8
11
0.0013
0.12
11.5
-9.75
4
8
13
0.0004
0.084
12.5
75.6
5
10
98
Table A 3.4 Line Data for IEEE 57-bus system
Line no
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
line
1-2
2-3
3-4
4-5
4-6
6-7
6-8
8-9
9-10
911
9-12
9-13
13-14
13-15
1-15
1-16
1-17
3-15
4-18
4-18
5-6
7-8
10-12
11-13
12-13
12-16
12-17
14-15
18-19
R p.u
0.0083
0.0298
0.0112
0.0625
0.043
0.02
0.0339
0.0099
0.0369
0.0258
0.0648
0.0481
0.0132
0.0269
0.0178
0.0454
0.0238
0.0162
0
0
0.0302
0.0139
0.0277
0.0223
0.0178
0.018
0.0397
p.0171
0.461
X p.u
0.028
0.085
0.0366
0.132
0.148
0.102
0.173
0.0505
0.1679
0.0848
0.295
0.158
0.0434
0.0869
0.091
0.206
0.108
0.053
0.555
0.4
0.0641
0.0712
0.1262
0.0732
0.058
0.0813
0.179
0.0547
0.685
Bp.u
0.0645
0.0409
0.019
0.0129
0.0174
0.0138
0.0235
0.0274
0.022
0.0109
0.0386
0.0203
0.0055
0.0115
0.0494
0.0273
0.0143
0.0272
0
0
0.0062
0.0097
0.0164
0.0094
0.0302
0.0108
0.0238
0.0074
0
99
Table A 3.4 (Continued)
Line no
line
R p.u
X p.u
Bp.u
30
19-20
0.283
0.434
0
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
21-10
21-22
22-23
23-24
24-25
24-25
24-26
26-27
27-28
28-29
7-29
25-30
30-31
31-32
32-33
34-32
34-35
35-36
36-37
37-38
37-39
36-40
22-38
11-41
41-42
41-43
38-44
15-45
14-46
47-48
0
0.0736
0.0099
0.166
0
0
0
0.165
0.0618
0.0418
0
0.135
0.326
0.507
0.0392
0
0.052
0.043
0.029
0.0651
0.0239
0.03
0.0192
0
0.207
0
0.0289
0
0
0.0182
0.7767
0.117
0.0152
0.256
1.182
1.23
0.0473
0.254
0.0954
0.0587
0.0648
0.202
0.497
0.755
0.036
0.953
0.078
0.0537
0.0366
0.1009
0.0379
0.0466
0.0295
0.749
0.352
0.412
0.585
0.1042
0.0735
0.0233
0
0
0
0.0042
0
0
0
0
0
0
0
0
0
0
0
0
0.0016
0.0008
0
0.001
0
0
0
0
0
0
0.001
0
0
0
100
Table A 3.4 (Continued)
Line no
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
line
48-49
49-50
50-51
10-51
13-49
29-52
52-53
53-54
54-55
11-43
44-45
40-56
56-41
56-42
39-57
57-56
38-49
38-48
9-55
46-47
R p.u
0.0834
0.0801
0.1386
0
0
0.1442
0.0762
0.1878
0.1732
0
0.0624
0
0.553
0.2125
0
0.174
0.115
0.0312
0
0.023
X p.u
0.129
0.128
0.22
0.0712
0.191
0.187
0.0984
0.232
0.2265
0.153
0.1242
1.195
0.549
0.354
1.355
0.26
0.177
0.0482
0.1205
0.068
Bp.u
0
0.024
0
0
0
0
0
0
0
0
0.002
0
0
0
0
0
0.0015
0
0
0.0016