A C O U S T I C S of W O O D
Jan Tippner, Dep. of Wood Science, FFWT MU Brno
jan.tippner@mendelu.cz
Lecture 3
A C O U S T I C S of W O O D
Lecture 3
Content of lecture 3:
1. Damping
2. Internal friction in the wood
A C O U S T I C S of W O O D
Lecture 3
Content of lecture 3:
1. Damping
2. Internal friction in the wood
A C O U S T I C S of W O O D
Lecture 3
Damping
­ sine wave is a waveform generated by a system that is characterised by simple harmonic motion ­ ideal system which exhibits simple harmonic motion is a system that loses no energy (or has its energy replenished from outside the system)
­ such a waveform can also be called a continuous waveform as it continues forever without eventually reducing to zero intensity
A C O U S T I C S of W O O D
Lecture 3
Damping
­ real systems are never ideal; all naturally­occuring systems loose energy (eg. as heat due to friction)
­ system loses energy as heat (both internally as a consequence of heat loss during physical deformation and externally as a consequence of friction with air)
­ this loss of energy in an oscillating system is know as damping; a damped waveform is also know as a non­
continuous waveform
A C O U S T I C S of W O O D
Lecture 3
Damping
­ damped waveform can die out quickly or slowly; waveform that dies out quickly is said to be strongly damped as it loses energy quickly; waveform that dies out slowly is said to be weakly damped as it loses energy slowly
­ damping is not just a characteristic of systems that generate non­continuous sine wave like patterns, damping is a characteristic of systems that produce sounds with very complex spectral patterns
­ in physics, damping is any effect that tends to reduce the amplitude of oscillations in an oscillatory system, particularly the harmonic oscillator
­ in mechanics, friction is one such damping effect. For many purposes the frictional force Ff can be modeled as being proportional to the velocity v of the object:
Ff = −c v
where: c is the viscous damping coefficient, given in units of newton­seconds per meter
A C O U S T I C S of W O O D
Lecture 3
Damping
­ damped harmonic oscillators satisfy the second­order differential equation:
where: ω0 is the undamped angular frequency of the oscillator and ζ is a constant called the damping ratio
­ for a mass on a spring having a spring constant k and a damping coefficient c:
ω0 = √(k/m)
ζ = c/2mω0.
A C O U S T I C S of W O O D
Lecture 3
Damping
­ value of the damping ratio ζ determines the behavior of the system. A damped harmonic oscillator can be:
1. Overdamped (ζ > 1)
­ system returns (exponentially decays) to equilibrium without oscillating; larger values of the damping ratio ζ return to equilibrium slower
2. Critically damped (ζ = 1)
­ system returns to equilibrium as quickly as possible without oscillating (often desired)
3. Underdamped (ζ < 1)
­ system oscillates (with a slightly different frequency than the undamped case) with the amplitude gradually decreasing to zero
­ frequency of the underdamped harmonic oscillator is given by: A C O U S T I C S of W O O D
Example of Spring – Mass System A mass m attached to a spring and damper. The damping coefficient is represented by B, F denotes an external force.
Lecture 3
A C O U S T I C S of W O O D
Lecture 3
Example of Spring – Mass System
­ ideal mass­spring­damper system with mass m (in kilograms), spring constant k (in newtons per meter) and viscous damper of damping coefficient c (in newton­seconds per meter or kilograms per second) is subject to
an oscillatory force............................................ and a damping force................................................................... ­ treating the mass as a free body and applying Newton's second law (F=ma), the total force Ftot on the body is
where: a is the acceleration (in meters per second squared) of the mass and x is the displacement (in meters) of the mass relative to a fixed point of reference
Ftot = Fs + Fd >>>>>>
A C O U S T I C S of W O O D
Lecture 3
Example of Spring – Mass System
­
rearr. to:
where: (undamped) natural frequency of the system: the damping ratio:
­ the natural frequency represents an angular frequency, expressed in radians per second
­ the damping ratio is a dimensionless quantity
A C O U S T I C S of W O O D
Lecture 3
Example of Spring – Mass System
­ the differential equation now becomes ­ we can solve the equation by assuming a solution x such that: where: the parameter γ (gamma) is, in general, a complex number.
­ substituting this assumed solution back into the differential equation gives which is the characteristic equation.
­ solving the characteristic equation will give two roots, γ+ and γ−; and the solution to the differential equation is: where: A and B are determined by the initial conditions of the system:
A C O U S T I C S of W O O D
Lecture 3
Example of Spring – Mass System
­
rearr. to:
where: (undamped) natural frequency of the system: the damping ratio:
­ the natural frequency represents an angular frequency, expressed in radians per second
­ the damping ratio is a dimensionless quantity
A C O U S T I C S of W O O D
Lecture 3
A harmonic oscillator can be:
1. Overdamped (ζ > 1) ­ system returns (exponentially decays) to equilibrium without oscillating; larger values of the damping ratio ζ return to equilibrium slower
2. Critically damped (ζ = 1) ­ system returns to equilibrium as quickly as possible without oscillating (often desired)
3. Underdamped (ζ < 1) ­ system oscillates (with a slightly different frequency than the undamped case) with the amplitude gradually decreasing to zero
4. Undamped (ζ = 0)
A C O U S T I C S of W O O D
Lecture 3
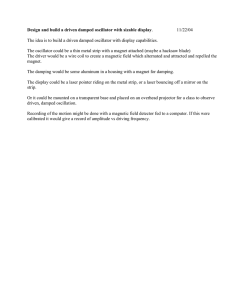
Dependence of the system behavior on the value of the damping ratio ζ, for under­damped, critically­damped, over­damped, and undamped cases, for zero­velocity initial condition.
A C O U S T I C S of W O O D
Lecture 3
­ the behavior of the system depends on the relative values of the two fundamental parameters, the natural frequency ω0 and the damping ratio ζ
­ in particular, the qualitative behavior of the system depends crucially on whether the quadratic equation for γ has one real solution, two real solutions, or two complex conjugate solutions.
1. Critical damping (ζ = 1) When ζ = 1, there is a double root γ (defined above), which is real. The system is said to be critically damped. A critically damped system converges to zero faster than any other, and without oscillating.
In this case, with only one root γ, there is in addition to the solution x(t) = eγt a solution x(t) = teγt:
where A and B are determined by the initial conditions of the system (usually the initial position and velocity of the mass):
A C O U S T I C S of W O O D
Lecture 3
2. Over­damping (ζ > 1)
When ζ > 1, the system is over­damped and there are two different real roots. The solution to the motion equation is:
where A and B are determined by the initial conditions of the system:
A C O U S T I C S of W O O D
Lecture 3
3. Under­damping (0 ≤ ζ < 1)
Finally, when 0 ≤ ζ < 1, γ is complex, and the system is under­damped. In this situation, the system will oscillate at the natural damped frequency ωd, which is a function of the natural frequency and the damping ratio. In this case, the solution can be generally written as:
where:
represents the natural damped frequency of the system, and A and B are again determined by the initial conditions of the system:
­ for an under­damped system, the value of ζ can be found by examining the logarithm of the ratio of succeeding amplitudes of a system ­ this is called the logarithmic decrement
A C O U S T I C S of W O O D
Lecture 3
Logarithmic Decrement of Damping
Logarithmic decrement, δ, is used to find the damping ratio of an underdamped system in the time domain. The logarithmic decrement is the natural log of the amplitudes of any two successive peaks:
where x0 is the greater of the two amplitudes and xn is the amplitude of a peak n periods away; the damping ratio is then found from the logarithmic decrement:
A C O U S T I C S of W O O D
Lecture 3
Q ­ factor
­ the quality factor or Q factor is a dimensionless parameter that describes how under­damped an oscillator or resonator is, or equivalently, characterizes a resonator's bandwidth relative to its center frequency
­ higher Q indicates a lower rate of energy loss relative to the stored energy of the oscillator; the oscillations die out more slowly (a pendulum suspended from a high­quality bearing, oscillating in air, has a high Q, while a pendulum immersed in oil has a low one)
­ for a single damped mass­spring system, the Q factor represents the effect of simplified viscous damping or drag, where the damping force or drag force is proportional to velocity. The formula for the Q factor is:
where M is the mass, k is the spring constant, and D is the damping coefficient, defined by the equation Fdamping = − D v, where v is the velocity
bandwidth, Δf, of a damped oscillator is shown on a graph of energy versus frequency. The Q factor of the damped oscillator, or filter, is f0 / Δf. The higher the Q, the narrower and 'sharper' the peak is.
A C O U S T I C S of W O O D
Lecture 3
Simulation by finite element method
­ Ansys software
­ unsteady: full transient solution
­ 1D (beam), 2D (shell), ev. 3D (solid)
­ 1D solution: http://homepages.strath.ac.uk/~clas16/~fyfe/ansys/dynamic/transient/transient.html
http://www.mece.ualberta.ca/tutorials/ansys/IT/Transient/Transient.html
­ preprocessing (geometry, physics), solution, postprocessing (time history)
­ modal analysis >>>>> full transient analysis
­ adaptation for wood (changes of material model)
A C O U S T I C S of W O O D
Lecture 3
Content of lecture 3:
1. Damping
2. Internal friction in the wood
 0
0