Decentralized stability-enhancing control of
advertisement

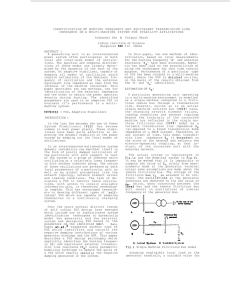
1336 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 15, NO. 4, NOVEMBER 2000 Decentralized Stability-Enhancing Control of Synchronous Generator J. Machowski, S. Robak, J. W. Bialek, J. R. Bumby, and N. Abi-Samra Abstract—This paper describes new structures for stability-enhancing excitation controllers designed using a nonlinear multi-machine system model and Lyapunov’s direct method. Two control structures are presented: a hierarchical structure in which the AVR is the master controller and the PSS the slave controller and a traditional structure in which the PSS constitutes a supplementary loop to the main AVR. Both controllers are shown to be robust, as the damping they introduce into the system is insensitive to changes in both the system topology/parameters and the pattern of network flows. Each individual controller contributes positively to the overall system damping with no undesirable interaction between controllers. These features should allow a decentralized approach to the design of the AVR PSS. Such a design approach is compatible with the new competitive market structures and should result in savings on commissioning costs. Simulation results for a multi-machine power system are presented that confirm the above and show that the two control structures are very effective in damping both local and inter-area power swings. + Index Terms—Power system control, power system stability, synchronous generator excitation. I. INTRODUCTION T HE FUNCTIONAL diagram of a traditional excitation control system is shown in Fig. 1. The excitation voltage is supplied from the exciter and is controlled by the Automatic Voltage Regulator (AVR). Its aim is to keep the . Although terminal voltage equal to the reference value the AVR is very effective during normal steady-state operation, it may have a negative influence on the damping of power swings in the transient state [1], [2]. To compensate for this a supplementary control loop, known as the Power System Stabilizer (PSS), is often added as shown in Fig. 1. Considerable research effort has been devoted to the design of the AVR PSS system. Generally the properties of a particular PSS depend on the choice of the input quantities. The , genermost commonly used quantities are speed deviation ator real power , generator current , frequency deviation or the transient emf . As each of these quantities has its own Manuscript received February 12, 1999; revised December 21, 1999. This work was supported by the Electrical Power Research Institute, Grant WO8555-01. J. Machowski and S. Robak are with the Warsaw University of Technology, Instytut Elektroenergetyki, Koszykowa 75, 00-662 Warsaw, Poland. J. W. Bialek and J. R. Bumby are with the University of Durham, School of Engineering, Science Site, South Road, Durham DH 1 3LE, UK. N. Abi-Samra is with the Electrical Power Research Institute, 3412 Hillview Ave., Palo Alto, CA 94304-1395, USA. Publisher Item Identifier S 0885-8950(00)10368-2. Fig. 1. Functional diagram of traditional excitation control system. advantages and disadvantages, the PSS is often designed to operate on two or more input signals. The main problems associated with the design of traditional AVR PSS systems are: 1) the optimal settings usually depend on the power system parameters and the system loading condition; 2) it is difficult to design an AVR PSS that damps efficiently multi-modal oscillations containing both local and inter-area modes; 3) individual AVR PSS systems often cause harmful interactions in multi-machine systems. Although the PSS itself is not expensive, the commissioning costs can be quite high because of the need to undertake extensive system-wide studies in order to optimize the AVR and PSS settings. Many research centers are trying to develop improved PSS systems that are robust and able to cope with AVR multi-modal power swings over a wide range of operating conditions. Among the many approaches proposed so far are those based on the use of adaptive systems [3], artificial intelligence tools [4], [5], robust control techniques [6], feedback linearizing excitation control [7] and multi-loop controller [8]. This paper presents a novel approach to the design of power system controllers based on the application of the Lyapunov’s direct method. The design technique was originally applied to a nonlinear single generator-infinite busbar model [9]–[11]. In this paper the approach is generalized to the nonlinear multi-machine case. II. THEORETICAL BACKGROUND Point is the equilibrium point of the dynamic system deif . scribed by a set of nonlinear equations Lyapunov’s stability theorem states that this equilibrium point such that: i) is stable if there is a Lyapunov function is positive definite with a minimum value at , and ii) the time 0885–8950/00$10.00 © 2000 IEEE MACHOWSKI et al.: DECENTRALIZED STABILITY-ENHANCING CONTROL OF SYNCHRONOUS GENERATOR derivative along the system trajectory is neg. If then the equilibrium ative semi-definite, i.e. point is asymptotically stable. The time derivative along the can be calculated as: system trajectory 1337 For the third order generator model [2]: (5) (6) and , are the - and -axis components of the generwhere , and and are the synator current, chronous and transient -axis generator reactance, respectively. B. Network (1) decreases with time and If is negative then the function tends toward its minimum value, the system equilibrium point . The more negative the value of the faster the system returns to the equilibrium point . The automatic control of any system element, such as synchronous generators, turbines or FACTS devices, influences the value of . Consequently any given control improves (in the Lyapunov sense) the transient stability of the system if it maximizes the negative value of at each instant of the transient state. With these observations a design approach can be defined that comprises of three stages: find an appropriate i) For given dynamic system that is an explicit function of Lyapunov function the control variables. ii) Select a control law that maximizes the negative value of at all points along the system trajectory. iii) Select locally available signals to execute the chosen control law. III. SYSTEM MODEL A. Generators Lines and transformers are described by their -equivalents whilst a load is replaced by a constant admittance. The generator are added to the network model transient reactances to form fictitious generation nodes with the generator transient emf as the nodal voltage. All the load nodes are eliminated so that the original transmission network is reduced to a transfer equivalent network connecting all the generation nodes [2]. For such a system model, and noting that for the third order gener, the -components of electric current ator model of the th generator can be expressed as [2]: (7) (8) is the element of the transfer admittance matrix and where is the number of generators in the system. In deriving these equations the conductance in the transfer equivalent network . To account for power balhad been neglected, i.e. in (8) ance in the system model the equivalent conductance includes the power losses that would have been present in the . Substituting (7) and (8) into (5) and transfer conductance (6) gives: The stability of electric power systems is usually assessed by using a simplified synchronous generator model. In this paper the third-order generator model is used [2]: (9) (2) (10) (3) (4) is the real power of the equivalent load where constant. at the generation node. It is further assumed that C. System In these equations the subscript relates to the generator number, is the power (rotor) angle and is the speed deviation. is the inertia the mechanical time constant, the rated coefficient, the mechanical power, the electrical power, power, the damping coefficient, the quadrature-axis component the open-circuit transient time constant of transient emf, the excitation voltage. A “hat” on the top of a symbol and corresponds to the post-fault equilibrium point. Note that . The following notation is introduced: (11) (12) (13) (14) 1338 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 15, NO. 4, NOVEMBER 2000 Substituting (11)–(14) into (2)–(4) results in the following nonlinear multi-machine system model: (15) The time derivative of this function can be derived from (1) as the sum of the time derivatives of the three components , , . The component given by (19) depends only on the and rotor speed deviation. Its time derivative is: (16) (17) IV. LYAPUNOV’S DIRECT METHOD If the flux variation in the generator is neglected (constant transient emf) then the state-space system model defined by (15)–(17) simplifies to the classical model with the generators modeled by the swing (15) and (16) only. An energy-type Lyapunov function for such a system model comprises of the sum of the system kinetic and potential energy with respect to the equilibrium point [2], [12]: (18) (23) , given by (20), depends on the rotor angles The component and the transient emfs, so that its time derivative must be calculated as: (24) Hence: and are proportional to the kinetic and The functions potential energy of the system such that: (25) (19) in (21) depends only on the transient As the component emfs, its time derivative is: (26) (20) Equations (23), (25) and (26) do not depend explicitly on the . An implicit dependence is obtained using control variables and (17). the time derivatives gives: Multiplying (17) by and are positive-definite around the equiBoth functions librium point. Lyapunov functions derived for higher-order power system models usually contain some additional components. For the third-order generator model a Lyapunov function derived by Kakimoto et al. [13] included a component proportional to the squared deviation of the transient emf (27) Re-arranging the terms in this equation results in: (21) is a In this equation the subscript refers to “field.” As square function it is positive-definite around the equilibrium point. The candidate Lyapunov function is obtained as the sum: (28) (22) MACHOWSKI et al.: DECENTRALIZED STABILITY-ENHANCING CONTROL OF SYNCHRONOUS GENERATOR 1339 is positive and maximum. This condition is satisfied by the control law Substituting (28) into (26) gives: (34) (29) Comparing (23), (25) and (29) shows that there are similar components in these equations, but with opposite signs. One , and the other in , common component is in the pair . These common components are due to the exchange of energy between kinetic, potential and field energy. For example the kinetic energy is converted into potential energy and vice versa during power swings. Substituting (23), (25) and (29) into the derivative gives: is the controller gain. Substituting (34) into (32) and where (31) gives, respectively: (35) (36) Equation (36) shows that the control law given by (34) ensures that the system is stable and tends toward the post-fault equilibrium point with maximum speed. Obviously this law is optimal only for the Lyapunov function used. As Lyapunov functions are nonunique, another formulation may result in a modified control law. The control law defined by (34) can be re-written as (30) (37) With manual excitation control the AVR is inactive, constant, and the last component in (30) is zero. In this case the time derivative is negative semi-definite, the function , expressed by (22), is a Lyapunov function and the system is stable. Whether or not the derivative , given by (30), is negative semi-definite when the excitation voltage is controlled by the . AVR depends on the control strategy chosen for where (38) defines the post-fault steady-state synchronous emf. This emf and the loading depends on the required terminal voltage condition. The synchronous emf is induced by the field current and can therefore be replaced by V. CONTROL STRATEGIES The excitation control law for must maximize the negative value of at any instant in time. This control law will then bring the system back to the equilibrium point as quickly as possible. Substituting the values obtained from (4) into (30) yields (39) (40) is the -axis armature reaction reactance. Subwhere stituting (38) and (39) into (37) gives the following control strategy: (41) (31) where An alternative control strategy is obtained by substituting (38) and (40) into (41) to give: (42) (32) where The first and the second components in (31) are negative semidefinite and always contribute to the overall system damping. The third component is given by (32) and it is this component that is influenced by the excitation control. Equation (32) is determined by the sum over all the generators of (33) Consequently (32) is negative maximum when each of the components of the sum is positive maximum. This means that at any instant in the transient state the excitation voltage will en, (33) sure that, after taking into account any constraints on (43) is the increment in the field current. Obviously the control strategies defined by (41) and (42) are valid only for the third order synchronous generator model used in the derivation. For this generator model, the field current is smooth as it contains only fluctuations at low swing frequencies. In reality, the dc offset in the armature current, which flows during the subtransient state, will induce a rapidly decaying 50 Hz component in the field current. Moreover, a static exciter using commutation of an ac source will also produce persistent ripples in the field current. All these fast harmonics must 1340 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 15, NO. 4, NOVEMBER 2000 be “washed out” of the measured signal using a low-pass filter, for example a Bessel filter. VI. IMPORTANT FEATURES The first important feature of the proposed control law defined by (34) is that the function , given by (36), is independent of the network parameters. It depends only on the controller , the generator reactance and gain , the speed deviation and the deviation time constant . As determines the speed at which the system trajectory tends toward the equilibrium point, it determines the system damping. This would suggest that, with the proposed control strategy, the contribution of each generator to the overall system damping is insensitive to changes in either tire network topology/parameters or the pattern of network flows. This is very important as it suggests that the proposed stabilizer is robust in that it does not need re-tuning following network changes. The second important feature is that each generator controlled according to the control law (34) contributes an (38) independent component into given by (35), with no cross-coupling terms between generators. In other words each individual controller contributes a damping term independent of all the other controllers. This very important feature of the proposed controller is referred to as the additivity of damping. In traditional AVR PSS systems the settings of individual controllers must be coordinated as any controller may influence any other controller in the system. In contrast, the additivity of damping for the proposed controllers suggests that their settings need not be coordinated. The robustness of the proposed stabilizer in conjunction with the additivity of damping are very important features of the proposed control as they allow a decentralized approach to the design of stabilizing controllers. The parameters of the proposed AVR PSS system can be determined in a decentralized way, without considering the impact of other controllers or system conditions. This feature of the proposed controller, which is unique among competing AVR PSS design methodologies, should reduce the commissioning costs. It is also compatible with the new market structure in which individual generators compete against each other and may be unwilling to disclose detailed information about their generators and control systems. Such information is necessary for optimal tuning of traditional AVR PSS systems. The features of the stabilizing control system discussed above have been proved theoretically for the simplified system model. The simulations described in Section X show the validity of the control law (34) when applied to higher order, more realistic, system models. VII. CONTROLLER BLOCK DIAGRAMS This section assumes the use of a static exciter. In the transient state, a static exciter can be represented as a proportional and shown in Fig. 1 are then problock [1], [2]. Voltages . portional to each other and, in per-unit, Fig. 2. Hierarchical structure. This equality is valid only for the static exciter. For other types of exciter an additional transfer function would have to be included in the block diagram to compensate for the equivalent transfer function of the exciter. A. Hierarchical Structure Fig. 2 shows the functional block diagram of a hierarchical excitation controller capable of executing the control strategy (41). The symbol ST denotes a static exciter. The lower part of this diagram, denoted as PSS, generates the signal that is proportional to the change in the generator synchronous . This emf with respect to the post-fault equilibrium value determined signal is subtracted from the reference value by the AVR shown in the upper part of the diagram. The AVR acts with a classical voltage feedback loop and sets the reference depending on the required value of the synchronous emf and the system loading condition. terminal voltage The structure of the hierarchical excitation controller is different to the traditional AVR PSS of Fig. 1. In the traditional solution, the AVR is the main controller whilst the PSS is a supplementary control loop. The structure of the proposed controller is hierarchical and of the master–slave type. The slave (primary) controller is the PSS and the master (secondary) controller is the AVR. The PSS has two input signals: i) the reference value of the synchronous emf provided by the AVR and ii) a feedback signal equal to the field current. The PSS does not contain any phase compensation lead-lag elements. It is basically a proportional controller as the change in the excitation voltage is proportional to the change in the synchronous emf (or the field current). This hierarchical structure is similar to that of the turbine governing system as discussed in [9]. The role of the additional TSEC block shown in the right-hand part of Fig. 2 will be described in Section IX. B. Structure with a Supplementary Loop The alternative excitation control strategy (42) is executed with a more traditional AVR PSS structure where the AVR is the main control loop and the PSS is a supplementary loop. Fig. 3 shows the functional block diagram of such an excitation controller. The symbol ST denotes a static exciter. A supplementary signal, proportional to the field current de, is subtracted from the signal generated by the AVR. viation MACHOWSKI et al.: DECENTRALIZED STABILITY-ENHANCING CONTROL OF SYNCHRONOUS GENERATOR 1341 Fig. 4. Diagram of the four-machine test system [1]. Fig. 3. Structure with supplementary loop. In this more traditional structure a “wash-out” element provides , determined by (43), by eliminating from the signal . the field current The transfer function, and the parameters of the washout element, are chosen so that: • The magnitude of the frequency response is zero at zero frequency. This ensures that no constant signals are passed through. • Within the swing frequency range (0.2 to 2 Hz), signals are passed with approximately unity gain and with a small phase shift. Typically the washout element consists of one differentiating element and two lead-lag elements. It is important to note that the “wash-out” element is part of the device measuring the field current increment. Consequently its structure and parameters are fixed in a similar way as are the parameters of the signal sensor itself. The role of the additional TSEC block shown in the right-hand part of Fig. 2 will be described in Section IX. VIII. FREQUENCY CHARACTERISTIC OF THE AVR In both of the above control structures (Figs. 2 and 3) the is set by the AVR in order to maintain the reference value . Thus should not change as desired terminal voltage a consequence of voltage fluctuations following a power swing. To achieve this, the AVR should have a low effective gain at the swing frequency of typically 0.2–2 Hz. This can be achieved if the AVR is a PI regulator, or a proportional regulator with an appropriate transient gain reduction (TGR). order to increase the available deceleration area [2]. However a to sudshort-circuit causes the generator synchronous emf denly increase and the proposed controllers would counteract this by reducing the excitation voltage instead of increasing it. In order to deal with such situations the controllers shown in Figs. 2 and 3 are equipped with an additional logic circuit referred to as transient stability excitation control (TSEC). In normal operation, or during power swings following a short circuit, this additional control logic generates a signal TSEC and the controllers execute the control strategy defined by (41) or (42). During a short-circuit in the network a signal TSEC is generated and the output of the PSS is blocked giving the AVR absolute priority and, at the same time, the opportunity to increase the excitation voltage. When the fault is cleared the and the controllers operate TSEC logic is again set to TSEC according to the control law defined by (41) or (42). The TSEC can also be used to improve the recovery of the generator terminal voltage following a short circuit by modifying the output limits of the excitation system [10], [11]. There are many ways of designing the TSEC logic [10], [11]. In one simple version the TSEC detects the simultaneous presand a large acceleration power ence of a large voltage error . In the case of a short circuit in the network both the real power and generator terminal voltage decrease rapidly and the and are both large and negative. The TSEC increments circuit recognizes the large deviation (with the same sign) in . In the case of a power swing both signals and sets TSEC and have op(forward or backward) the increments posite sign. This enables the TSEC to distinguish between a short-circuit and a power swing. X. SIMULATION RESULTS IX. TRANSIENT STABILITY EXCITATION CONTROL The control law defined in (34) is valid only when the dynamic system is time-invariant and its parameters do not change with time. This is not the case during a short-circuit in the network. As a result, the control action derived from (34) may degrade the system stability during the fault instead of improving it. This can be explained as follows using the equal area criterion. During a short-circuit the generator rotor accelerates and corin rect control action should increase the excitation voltage Simulation results are presented for the four-machine system shown in Fig. 4 [1]. The system consists of two areas and each area has two generators. The frequency of the two local modes is about 1 Hz while the frequency of inter-area mode is about 0.5 Hz. Four excitation control schemes have been simulated in Figs. 5 and 6 with the first two schemes been taken from [1]. TGR corresponds to a static The scheme denoted as ST exciter with a proportional regulator plus transient gain reduc, , , tion (TGR) with parameters 1342 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 15, NO. 4, NOVEMBER 2000 gain reduction (TGR) with parameters; gain and time and whilst the Bessel filter has the constants same parameters as in the hierarchical structure. The transfer function of the washout element is For all the excitation control schemes the output limit of the , . The voltage excitation voltage is . sensor has a time constant The sixth-order generator model has been used in all the simulations so as to include sub-transient effects. The generator and network resistances have also been included. The loads are modeled as constant real and reactive power demands. Three types of disturbances have been studied: deg) • nonzero initial condition ( ) • a step change in the reference value ( • various network short-circuits. In all the simulations the proposed excitation controllers have demonstrated excellent performance producing fast damping of power swings and small oscillations in the terminal voltage following the disturbance. As an example, simulation results for the nonzero initial condegrees in the rotor angle of generator G1 are dition shown in Figs. 5–7. Additional results can be found in [10], [11]. Fig. 5. Damping of local swings: Generator G1. A. Damping of Local and Inter-Area Swings Fig. 6. Damping of inter-area swings. . The second scheme denoted as ST PSS corresponds to a static exciter with a proportional regulator. This . scheme includes a traditional PSS based on speed deviation , , , , The data are: , , , . The third scheme, denoted as “proposed (hierarchical),” corresponds to a static exciter equipped with the hierarchical excitation controller of Fig. 2. The low-pass Bessel filter has a transfer where , . The function and an additional primary controller (PSS) has a gain . The secondary controller (AVR) is , and a proportional-integral regulator with . The final excitation control scheme, an input limiter denoted as “proposed (supplementary),” is a static exciter fitted with proposed excitation controller with the supplementary loop, Fig. 3. The AVR is a proportional controller with transient To illustrate the damping of local swings, Fig. 5 shows the , generator terminal voltage variation of the real power and excitation voltage of generator G1 following the disturbance. Similar results were obtained for generators G2, G3 and G4. In these figures the dotted lines correspond to the case when all the generators are equipped with the ST TGR controller, the dashed lines when all the generators are equipped with the ST PSS controller and the solid lines to when all the generators are equipped with the proposed hiTGR is oscillatory erarchical controller. The case with ST unstable (as explained in [1]). Introducing the traditional PSS makes the system stable but the proposed hierarchical controller achieves significantly better damping in that both the first swing power overshoot and the settling time are reduced by about 50%. Similar performance has been obtained for the proposed controller with the supplementary loop. From the point of view of the damping of local swings there is no difference between either of the two, new, proposed structures. Fig. 6 shows the power swings in the tie-line between node 7 and node 8, i.e. it illustrates the damping of inter-area swings. The damping due to the traditional PSS and the proposed hierarchical structure is similar. However the performance of the proposed supplementary structure is much better. It reduces the first-swing overshoot by about 30% and the settling time by about 50% when compared to the traditional PSS. B. Additivity of Damping One of the most important features of the two proposed stabilizing systems is the additivity of damping and the lack of potentially harmful interactions between individual stabilizers. To illustrate this, Fig. 7 shows how the overall damping is improved MACHOWSKI et al.: DECENTRALIZED STABILITY-ENHANCING CONTROL OF SYNCHRONOUS GENERATOR 1343 F. Asynchronous Operation The optimization criterion of maximizing is valid only within the system stability area. When a generator loses synchronism, the proposed control may not improve the prospect of re-synchronization. Other AVR PSS systems also tend to suffer from this problem. Any control aiming at fast re-synchronization must coordinate the excitation control and the turbine control [14]. Fig. 7. Damping of inter-area swings as the number of installed proposed controllers increases. as the number of generators equipped with the proposed stabilizer is increased. The base case, shown by the dotted line, is when all the generators are quipped with ST TGR controllers and, as mentioned earlier, it is unstable. The other lines show the cumulative effect of adding, the proposed hierarchical controller to each generator in turn, i.e. first to G1 only, then to G1 and G4, then to G1, G3 and G4, and finally to all the generators. Clearly, adding each consecutive controller improves the damping of the power swings. C. Robustness of the Proposed Stabilizer Section VI showed that the proposed controllers should force the same rate of energy dissipation (i.e. damping) no matter what the equivalent network reactance is, or what the pattern of flows in the network are. In other words, the performance of the controller should be robust and not be limited to the assumed system operating conditions. Simulation studies for various system loading and changes in network parameters reported in [10], [11] have confirmed this. While the damping of the traditional PSS suffered when the system operating condition and/or network parameters changed, the performance of the proposed stabilizer tended to be unaffected. D. Comparison Between Two Control Structures Both the controller structures in Figs. 2 and 3 correct the reby subtracting from quired value of the synchronous emf it a signal proportional to the field current increment. In the two structures this increment is measured in a different way and therefore the dynamic behavior of both controllers is slightly different. A comparison of simulation results has shown that the damping of the local swings (generator power) provided by both controllers is very similar. The structure with the supplementary loop provides better damping for the inter-area oscillations (power in the tielines) and generally results in a smaller overshoot in the generator terminal voltage. E. Gain and Simplification of the Power System Model Equations (35) and (36) suggest that the higher the gain the better the damping. Simulations using the full Park’s model have shown that there is a limit to the gain beyond which the damping reduces. This may be due to the simplifications in the power system model used in the derivation of the theoretical control law. This problem is currently under further investigation. XI. CONCLUSION A new synchronous generator excitation control law has been derived using a nonlinear multi-machine system model. The control law uses an energy-type Lyapunov function to maximize the speed with which the system returns to the equilibrium point following a disturbance. This control law is optimal only for the particular Lyapunov function used. The proposed control law possesses two important features. First, the damping is insensitive to changes in both the system topology/parameters and the pattern of flows in the network. This means that the controllers are robust and do not need to be re-tuned following any system changes. Secondly, each individual controller contributes positively to the overall system damping without creating undesirable interactions between controllers. This would suggest that the settings of the proposed controllers do not need to be coordinated. Two different control structures have been discussed. The first structure is a hierarchical structure of the master–slave type where the master controller is the AVR and the slave controller is the PSS. The second structure follows a more traditional approach where the PSS is added to the AVR as a supplementary loop. Simulation results for a multi-machine test system have shown that both of the proposed excitation controllers are very effective in damping both local and inter-area swings caused by a variety of disturbances. With regards damping of the inter-area modes, and the overshoot in the generator terminal voltage, the structure with the PSS as a supplementary loop shows marginally better performance. The simulation results have confirmed that the damping provided by the proposed controllers is additive in a multimachine system. This allows individual controllers to be designed and operated in a decentralized way. This feature is especially important as it should reduce the AVR PSS commissioning costs. It is also compatible with the new competitive market structures. REFERENCES [1] P. Kundur, Power System Stability and Control: McGraw Hill, 1994. [2] J. Machowski, J. W. Bialek, and J. R. Bumby, Power System Dynamics and Stability: John Wiley & Sons, 1997. [3] G. P. Chen, O. P. Malik, G. S. Hope, Y. H. Qin, and G. Y. Xu, “An adaptive power system stabilizer based on the self-optimizing pole shift,” IEEE Trans. Energy Conversion, vol. 8, no. 4, pp. 639–645, 1993. [4] P. K. Dash, S. Mishra, and A. C. Liew, “Fuzzy-logic based AVR stabilizer for power system control,” IEE Proc. Gener. Transm. Distrib., vol. 142, no. 6, pp. 618–624, 1995. [5] Y. L. Abdel-Magid, M. Bettayeb, and M. M. Dawoud, “Simultaneous stabilization of power systems using genetic algorithms,” IEE Proc. Gener. Transm. Distrib., vol. 144, no. 1, pp. 39–44, 1997. 1344 [6] S. Chen and O. P. Malik, “H optimization-based power system stabiliser design,” IEE Proc. Gener. Transm. Distrib., vol. 142, no. 2, pp. 179–184, 1995. [7] C. A. King, J. W. Chapman, and M. D. Ilic, “Feedback linearizing excitation control on a full-scale power system model,” IEEE Trans. on Power Systems, vol. 9, no. 2, May 1994. [8] H. Bourlés, S. Peres, T. Margotin, and M. P. Houry, “Analysis and design of robust coordinated AVR/PSS,” IEEE Trans. on Power Systems, vol. 13, no. 2, May 1997. [9] J. Machowski, S. Robak, J. W. Bialek, and J. R. Bumby, “A novel excitation control system for use with synchronous generators,” IEE Proc. Gener. Transm. Distrib., vol. 145, no. 5, Sept. 1998. [10] J. Machowski, J. W. Bialek, S. Robak, and J. R. Bumby, “Decentralized Damping of Power Swings: Feasibility Study,” Electric Power Research Institute, Report TR112 417, Feb. 1999. IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 15, NO. 4, NOVEMBER 2000 [11] J. Machowski, S. Robak, J. Bialek, J. R. Bumby, and N. Abi Samra, “Lyaunov—Optimal damping of power swings,” in PSCC Conference, Trondheim, Norway, June 28–July 2, 1999. [12] M. A. Pai, Energy Function Analysis for Power System Stability. Boston, Dordrecht, London: Kluwer Academic Publishers, 1989. [13] N. Kakimoto, Y. Ohsawa, and M. Hayashi, “Transient stability analysis of multimachine power systems with field flux decays via Lyapunov’s direct method,” IEEE Trans., vol. PAS-99, no. 5, 1980. [14] J. Machowski, A. Smolarczyk, and J. Bialek, “Coordinated fast valving and excitation control as an effective method to enhance transient stability after severe faults,” in CIGRE Symposium “Working Plant and Systems Harder”, London, June 7–9, 1999.