Electro-hydraulic I/H Converters and WSR Way Valves
advertisement

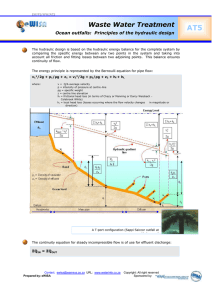
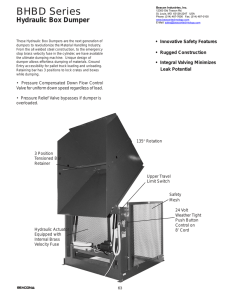
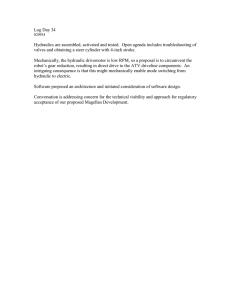
Electro-hydraulic I/H Converters and WSR Way Valves Actuator Technology for Positioning Cylinders on Turbomachinery Well-established technology Outstanding reliability All the world‘s our home Electro-hydraulic I/H converters and WSR way valves are the ideal eco­nomic solution for controlling hy­draulic positioning cylinders. This enables a valve to regulate the mass flow (e.g. steam) in a precise and highly dynamic manner. The electro-hydraulic I/H converters and WSR way valves design is a simple one: n Control magnet with integrated electronics n Hydraulic component We are a reliable partner to manu­ facturers and operators of turbo ma­ chines in all international markets. A current input signal (0/4 – 20 mA) in the I/H converters or WSR way valves is proportionally converted into an output pressure or an oil flow. This simple and compact design serves to ensure high operational reliability coupled with availability of the components, and your system. Voith Turbo actuator technology has established itself 10,000 times over in power plants across the globe and ensures economic oper­ ation of turbines and compressors. I/H converters Voith Turbo I/H converters convert a 0/4 – 20 mA current input signal quickly and precisely into proportional output pressure. 4 1 5 3 2 6 7 A Consumer terminal (output) T Tank connection P Oil supply terminal (input) 1 Control magnet housing 2 Tappet 3 Potentiometer 4 Manual adjustment 5 Electrical connection 6 Hydraulic component 7 Control piston T Design A Voith I/H converter is an electric­ ally-controllable pressure regulating valve, consisting of force-controlled solenoid and a hydraulic component. 2 A P Simple design and well-established operating principle Application principle 1: Direct actuation of a hydraulic cylinder Application principle 3: Operation of a pilot valve with electronic position return Application principle 2: Operation of a pilot valve with mechanical position return Mechanical position return s i s For process control engineering s A Steam valve Pilot valve Live steam Process control engineering X0 X1 w U UHALL F Live steam P Pilot valve A T P X0, X1 A +24V + T FHydr FMag T P FMag FHydr UHall U s i w Control magnet Hydraulic pilot control Electronic position return s Position pick up sensor A T P Live steam Consumer terminal (output) Tank connection Oil supply terminal (input) Parameters for output pressure range (potentiometer) Magnetic force Hydraulic force Hall voltage Voltage Stroke Position pick up sensor current signal Nominal value for output pressure Function Solenoid-force control generates a magnetic force of FMag in a 24V d.c. solenoid. This magnetic force is pro­ portional to the 0/4 – 20 mA input signal (w), the limits are configured using the X0 and X1 parameters. The electronic control, magnetic flux measurement, engineering de­ sign of the magnet and the hydraul­ ic pilot control together form a dy­ namic functional unit that is prac­ tically free of hysteresis. The control magnet applies the force FMag to the control piston. This in turn counteracts hydraulic force FHydr as generated by the pressure at output A over the cross-sectional area of the control piston (pressure regulator). As a result of this regulation, the output line of the actuator always receives the exact required pres­ sure and the oil quantity for pos­ itioning the steam or fuel valves. 3 Versatile application made possible by robust design and maximum precision Technical data and characteristics n Supply voltage 24 VDC consumption 1.0 A n Input signal 0/4 – 20 mA n Type of protection IP 65 n Input pressure up to 70 bar n Ambient temperature - 20 to + 80 °C for standard design n Explosion-proof design EEx d IIC T4 available n Current Type Maximum input pressure [bar] Control range for output pressure [bar] P ➞ A A ➞ T DSG-B03XXX 40 0–3 30 30 DSG-B05XXX 40 0–5 30 30 DSG-B05X48 20 0–5 100 140 DSG-B07XXX 40 1–7 30 30 DSG-B10XXX 40 0 – 10 30 30 DSG-B30XXX 70 0 – 30 30 30 DSG-B35XXX 70 10 – 35 30 30 Selection table System-specific data must be taken into consideration when defining a suitable I/H converter. When select­ ing an I/H converter, please make full use of our comprehensive know­ ledge. Our experienced sales staff will be only too glad to be of assist­ ance. 4 Flow rate [l/min] at p = 1 bar Voith Turbo I/H converters to a 300 MW steam turbine Customer benefits Outstanding reliability and Dynamic and precise positioning Simple installation and initial availability of the output pressure startup n Reproducibility n Device n Well-established operating principle n Dirt-resistant < 0.1 % no hysteresis n Temperature compensation n No drifting n Input pressure at least 0.5 bar higher than maximum output pressure n Fast response time n Almost and robust design Voith Turbo I/H converters to a 3.4 MW steam turbine (Photo: AG KK&K – www.agkkk.de) inspected and configured at factory (plug & play) n min. and max. Output pressures can be changed simply using parameters X0 and X1 (potentiometers) n Turbine lubricating oil can frequently be used as an operating medium n Depending on the model in ques­ tion, adapter plates, flushing plates and connecting cables are available Explosion-proof design (left) and standard design 5 WSR way valves Voith Turbo WSR way valves with integrated positioner convert in combination with an hydraulic cylinder a 4 – 20 mA current input signal quickly and pre­cisely into a propor­tional stroke. 3/3-WSR way valves or 4/3-WSR way valves can be used to position hydraulic cylinders in a highly dynamic manner. 4 3 1 3 5 2 6 7 8 3/3 -WSR way valve A Consumer terminal (output) T Tank connection P Oil supply terminal (input) 1 Control magnet housing 2 Tappet 3 Potentiometer 4 Manual adjustment 5 Electrical connection 6 Hydraulic component 7 Control piston 8 Control spring T Design A Voith Turbo WSR way valve (fuelquantity positioner) is an electric­ ally-controllable directional control valve, consisting of force-controlled solenoids and a 3/3-WSR way valve hydraulic unit for single-acting cylin­ ders or 4/3-WSR way valve hydraul­ ic unit for dual-acting cylinders. 6 A P Integrated control electronics for dynamic and high-precision changes in flow rate 3/3-WSR way valve for single-acting hydraulic cylinders Position pick up sensor Hydraulic cylinder Position pick up sensor s i 4/3-WSR way valve for dual-acting hydraulic cylinders Steam control valve s Hydraulic cylinder s i Steam control valve s Live steam Live steam - + X0 X1 +24V x w - UMag + KPU KPD U A FMag FF F UHall T Control magnet P Hydraulic pilot control Process control engineering Process control engineering + X0 X1 +24V x w UMag + KPU KPD FMag FF F UHall T Control magnet Function The specific system deviation (nom­ inal value w - actual value x) and the set control gain KPU resp. KPD, yields a reference variable UMag for the solenoid force control. The mag­ netic force FMag generated in the magnet system is monitored indir­ ectly through measurement of the magnetic flux over UHall and sent back to the controller. FMag acts via the tappet on the control piston of the hydraulic pilot control. This is deflected against the control spring U B A until the travel-specific spring force FF balances out against the force FMag. This results in a volumetric flow that can be changed in both direction and size, and which can adjust the stroke s of an externally mounted hydraulic cylinder. The actual position is monitored by means of a position pick up sensor and sent to the positioner inte­ grated into the WSR way valve. The adjustment of hydraulic cylinder occurs position controlled. P T Hydraulic pilot control A, B T P X0, X1 Consumer terminals (outputs) Tank connection Oil supply terminal (input) Parameters for stroke adjustment (potentiometers) KPU, KPD Control gains (potentiometers) w Position nominal value (4 – 20 mA) x Position actual value (4 – 20 mA) Magnetic force FMag Force for control spring F F Hall voltage UHall Reference variable for solenoid UMag force FMag U Voltage s Stroke i Position pick up sensor current signal 7 Large flow rates and maximum accuracy enable versatile application Technical data and characteristics nSupply voltage 24 VDC consumption 1.0 A nInput signal 4 – 20 mA nRemote display 4 – 20 mA nType of protection IP 65 nInput pressure up to 160 bar n Ambient temperature - 20 to + 80 °C for standard design n Explosion-proof design EEx d IIC T4 available nCurrent Type Maximum input pressure [bar] P ➞ A A ➞ T Type Maximum input pressure [bar] Flow rate [l/min] at p = 2 bar P ➞ A/B A/B ➞ T WSR-C25XXX 200 17 62 WSR-D16XXX up to 160 14 14 WSR-C45XXX up to 40 22 75 WSR-D24XXX 40 40 40 WSR-C60XXX up to 40 35 150 WSR-D45XXX up to 40 80 80 WSR-E60XXX up to 40 30 350 WSR-D60XXX 40 130 130 WSR-E80XXX up to 40 50 600 WSR-D80XXX 40 180 180 WSR-K120XXX 25 600 600 WSR-K120XXX 25 600 600 Selection table for 3/3-WSR way valve System-specific data must be taken into consideration when defining a suitable WSR way valve. When se­ lecting a WSR way valve, please make full use of our comprehensive knowledge. Our experienced sales staff will be only too glad to be of assistance. 8 Flow rate [l/min] at p = 1 bar Selection table for 4/3-WSR way valve Customer benefits Outstanding reliability and Dynamic and high-precision Simple installation and initial availability control startup n Resolution n Device n Well-established operating principle n Dirt-resistant and robust design Voith Turbo WSR way valves to a 40 MW steam turbine (photo: MAN Turbo) < 10 µm n Almost no hysteresis n Temperature compensation n Load shedding < 300 ms can be realized inspected and configured at factory (plug & play) n The stroke range and control re­ sponse of the working cylinder can be easily changed and optimized using the potentiometers (X0, X1, KPU, KPD) n Turbine lubricating oil can frequent­ ly be used as an operating medium Standard version, explosion-proof version optional 9 Redundant actuator technology – maximum availability I/H converter module =2 x I/H converter + maximum selection Position pick up sensor x1 i x2 i x3 i Hydraulic cylinder s s s For process control engineering x1 x2 x3 Live steam A X0 X1 +24V + w1 Process control engineering Steam control valve s U UHall X0 + U UHall pA1 FHydr F +24V X1 w2 FMag FMag Maximum selection FHydr F pA2 T 2 x Control magnet P Hydraulic pilot control Function Dual-channel conversion of electrical actuating signals into a hydraulic pressure with maximum selection: The two electrical actuator signals w1 and w2 (4 – 20 mA) of a redundant turbine controller are each converted separately by a well-established Voith I/H converter into a propor­ tional hydraulic pressure pA1 and pA2. Both pressures act on a hydraulic maximum selection. The higher pres­ sure is switched through (A). The hy­ draulic function can be continuously 10 monitored with the aid of additional­ ly-integrated pressure sensors under normal operating conditions through ramp-shaped lowering of the turbine controller‘s nominal value. This pres­ sure variation enables diagnosis of each sub-system to be conducted during operation. Each I/H converter receives an elec­ tronic monitoring circuit which serves to ensure that in the event of any malfunction the I/H converter then regulates towards minimum output pressure. The output pres­ sure of the correctly operating I/H converter is switched through. The process then continues smoothly. The faulty device can be replaced during operation. Tandem WSR way valve = 2 x control magnet + hydraulic component Position pick up sensor x1in i x2in i Hydraulic cylinder s s Steam control valve s Live steam - Process control engineering + X0 X1 X1 x1out w1 - + X0 x2out +24V - U + KPU KPD UHall +24V FMag F U + KPU KPD A FMag FF F UHall w2 T Control magnet 1 Control magnet 2 Function Both control magnets are given a separate nominal value (w1 and w2) and a separate position pick up sensor (x1in and x2in) is connected to each control magnet. The control magnet 1 armature moves the con­ trol piston of the hydraulic pilot control via the control magnet 2 armature. If control magnet 1 is active then control magnet 2 is inactive, although switched on. In the event of a malfunction, the control magnet 1 is switched off and control magnet 2 is activated over the nominal value (w2) using a specific transit time („warm redun­ dancy“). The switching logic is lo­ cated externally in the control engin­ eering and it monitors the control magnets (position pick up sensor displays x1out and x2out). It also gener­ ates the switchover signals. Tandem WSR way valves are also available as 3/3 and 4/3 versions. P Hydraulic pilot control A T P pA1, pA2 X0, X1 Consumer terminal (output) Tank connection Oil supply terminal (input) Output pressure for I/H converter Parameters for stroke or pressure adjustment (potentiometers) KPU, KPD Control gains (potentiometers) w Stroke or pressure nominal value (4 – 20 mA) x Position actual value (4 – 20 mA) Magnetic force FMag Hydraulic force FHydr Force for control spring F F Hall voltage UHall U Voltage s Stroke i Position pick up sensor current signal 11 cr304en, S&F /WA, 06.2010, 1500. Dimensions and illustrations without obligation. Subject to modifications. Voith Turbo GmbH & Co. KG Electronic Drive Systems Voithstr. 1 74564 Crailsheim, Germany Tel. +49 7951 32-470 Fax +49 7951 32-605 turcon@voith.com www.voithturbo.com/actuation-control-turbomachinery