On the Steady-State Behavior of Forced Nonlinear - Mittag
advertisement

On the Steady-State Behavior of Forced
Nonlinear Systems
D. S. Gilliam, C. I. Byrnes, A. Isidori and J.
Ramsey
REPORT No. 6, 2002/2003, spring
ISSN 1103-467X
ISRN IML-R- -6-02/03- -SE+spring
On the Steady-State Behavior
of Forced Nonlinear Systems
C.I. Byrnes
Systems Science and Mathematics,
Washington University,
St. Louis, MO 63130
chrisbyrnes@seas.wustl.edu
D.S. Gilliam
Mathematics and Statistics,
Texas Tech University,
Lubbock, TX 79409
gilliam@math.ttu.edu
A. Isidori
Informatica e Sistemistica,
Università di Roma
“La Sapienza”,
00184 Rome, ITALY
isidori@zach.wustl.edu
J. Ramsey
Boeing
james.ramsey@boeing.com
This paper† is dedicated to Art Krener – a great
researcher, a great teacher and a great friend
1
Introduction
The purpose of this paper is to discuss certain aspects of the asymptotic behavior of finite-dimensional nonlinear dynamical systems modeled by equations of the form
ẋ = f (x, w)
(1)
†
Research supported in part by AFOSR, The Boeing Corporation, Institut MittagLeffler, and ONR
1
in which x ∈ Rn and w ∈ Rr is an input generated by some fixed autonomous
system
ẇ = s(w) .
(2)
The initial conditions x(0) and w(0) of (1) and (2) are allowed to range over
some fixed sets X and W .
There are several reasons why the analysis of the asymptotic behavior
of systems of this kind is important. Indeed, every periodic function is an
output of a system (2), so that the study of the asymptotic behavior of (1)
– (2) includes the classical problem of determining existence (and possibly
uniqueness) of forced oscillations in a nonlinear system. On the other hand,
in control theory, an analysis of this kind arises when a system of the form
ẋ = f (x, w, u)
(3)
is given, with w still generated by a system of the form (2), and a feedback
control law u = u(x, w) is sought to the purpose of steering to 0 a prescribed
“regulated output”
e = h(x, w) ,
(4)
while keeping all trajectories bounded. In this case, in particular, the interest
is in the analysis and design of a system of the form (1) – (2) in which
trajectories are bounded and asymptotically approach the set
K = {(x, w) : h(x, w) = 0} .
(5)
A problem of this kind is commonly known as a problem of output regulation
or as the generalized servomechanism problem ([2, 6, 7, 8, 13]).
2
Notations and Basic Concepts
Consider an autonomous ordinary differential equation
ẋ = f (x)
(6)
with x ∈ Rn , t ∈ R, and let
φ : (t, x) 7→ φ(t, x)
define its flow [10]. Suppose the flow is forward complete. The ω-limit set of
a subset B ⊂ Rn , written ω(B), is the totality of all points x ∈ Rn for which
there exists a sequence of pairs (xk , tk ), with xk ∈ B and tk → ∞ as k → ∞,
such that
lim φ(tk , xk ) = x .
k→∞
2
In case B = {x0 } the set thus defined, ω(x0 ), is precisely the ω-limit set, as
defined by G.D.Birkhoff, of the point x0 . With a given set B, is it is also
convenient to associate the set
[
ψ(B) =
ω(x0 )
x0 ∈B
i.e. the union of the ω-limits set of all points of B. Clearly, by definition
ψ(B) ⊂ ω(B) ,
but the equality may not hold.
G.D.Birkhoff has shown that, if φ(t, x0 ) is bounded in positive time, the
set ω(x0 ) is non-empty, compact, invariant, and
lim dist(φ(t, x0 ), ω(x0 )) = 0 .
t→∞
More generally, recall that a set A is said to uniformly attract ‡ a set B under
the flow of (6) if for every ε > 0 there exists a time t̄ such that
dist(φ(t, x), A) ≤ ε,
for all t ≥ t̄ and for all x ∈ B.
With the above definitions we immediately obtain the following lemma.
Lemma 2.1 If B is a nonempty bounded set for which there is a compact
set J which uniformly attracts B (thus, in particular, if B is any nonempty
bounded set whose positive orbit has a bounded closure), then ω(B) is nonempty,
compact, invariant and uniformly attracts B.
3
The Steady-State Behavior
One of the main concerns, if not the main concern, in the analysis and design
of control systems, is the ability of influencing or shaping the response of
a given system to assigned external inputs. This can be achieved either by
open-loop or by closed-loop control, the latter being almost always the solution of choice in the presence of uncertainties, affecting the control systems
‡
Note that, in [10], the property which follows is simply written as
lim dist(φ(t, B), A) = 0, with the understanding that
t→∞
dist(B, A) := sup dist(x, A) = sup inf dist(x, y) .
x∈B y∈A
x∈B
3
itself as well as the external inputs to which the response has to be shaped
([1]-[4]). Among various possible criteria by means of which responses can be
analyzed and classified, a classical viewpoint, dating back to the origins of
control theory, is that based on the separation between “steady-state” and
“transient” responses; the former being viewed as the unique response (if
any) to which any actual response conforms to as time increases, while the
latter is defined as the difference between actual response and steady-state
one. There are several well-known strong arguments in support of the important role played by the idea of a steady-state response in system analysis
and design. On one hand, in a large number of cases it is actually required,
as a design specification, that the response of a system asymptotically converge to a prescribed function of time. This is for instance the case in the
so-called “set-point control” problem (which includes the problem of asymptotic stabilization to an equilibrium as a special case), where the response
of a controlled system is required to asymptotically converge to a fixed (but
otherwise arbitrary or unpredictable) value, and it is also for instance the
case when the response of a system is required to asymptotically track (or
reject) a prescribed periodically varying trajectory (or disturbance). On the
other hand, as is well-known in linear system theory, the ability to analyze
and shape the steady-state response to sinusoidally-varying inputs also provides a powerful tool for the analysis and, to a some extent, for the design
of the transient behavior.
Traditionally, the idea of a separation between steady-state and transient response stems from the observation that, in any finite-dimensional
time-invariant linear system, (i) the forced response to an input which is a
polynomial or exponential function of time normally includes a term which
is a polynomial (of degree not exceeding that of the forcing input) or an
exponential function (with an exponent whose rate of change is the same
as that of the forcing input) of time, and (ii) if the unforced system itself
is asymptotically stable, this term is the unique function of time to which
the actual response converges as the initial time tends to −∞ (regardless of
what the state of the system at the initial time is). In particular, a fundamental property on which a good part of classical network analysis is based is
the fact that, in any finite-dimensional time-invariant asymptotically stable
(single-input) linear system
ẋ = Ax + bu
forced by the harmonic input u(t) = u0 cos(ωt), there is a unique initial
condition x0 which generates a periodic trajectory of period T = 2π/ω,
and this trajectory is the unique trajectory to which any other trajectory
converges as the initial time t0 tends to −∞. As a matter of fact, using the
4
variation of parameters formula, it can be immediately checked that the the
integral formula
Z T
AT −1
A(T −t)
x0 = (I − e )
e
b cos(ωt)dt u0
0
provides the unique initial condition x0 from which a forced periodic trajectory, of period T = 2π/ω, is generated.
There are various ways in which this elementary result can be extended
to more general situations. For example, if a nonlinear system
ẋ = f (x, u)
(7)
has a locally exponentially stable equilibrium at (x, u) = (0, 0), i.e. if
f (0, 0) = 0, then existence, uniqueness and asymptotic stability of a periodic response forced by the harmonic input u(t) = u0 cos(ωt), for small
|u0 |, can be determined via center manifold theory, as explained in more detail in Sect. 4. In particular, it can be proven that, under these hypotheses,
for small |u0 | and small kx(t0 )k the forced response of the system always
converges, as t0 → −∞, to a periodic response generated from a uniquely
determined initial state x0 .
Even though we have motivated the interest in the notion of steady state
response in the context of problems of analysis and design for control systems,
it should be observed here that the principle inspiring this notion, at least
in the case of sinusoidally varying or periodic inputs, is the same principle
which is behind the investigation of forced oscillations in nonlinear systems,
a classical problem with its origin in celestial mechanics. In this respect,
however, it must be stressed that for a nonlinear system such as (7), forced
by the harmonic input u(t) = u0 cos(ωt), the situation is far more complex
than those outlined above, with the possibility of one, or several, forced oscillations with varying stability characteristics occurring. In addition, the
fundamental harmonic of these periodic responses may agree with the frequency of the forcing term (harmonic oscillations), or with integer multiples
or divisors of the forcing frequency (higher harmonic, or subharmonic, oscillations). Despite a vast literature on nonlinear oscillations, only for second
order systems is there much known about existence and stability of forced oscillation and, in particular, which of these kinds of periodic responses might
be asymptotically stable.
In the above, the steady-state responses of time-invariant systems were
intuitively viewed as the limits of the actual responses as the initial time t0
tends to −∞. This intuitive concept appears to be conveniently captured in
the notion of ω-limit set of a set, used in the theory of dissipative dynamical
5
systems by J.K.Hale and other authors and summarized in Sect. 2. More
specifically, consider again the composite system (1) – (2), namely the system
ẋ = f (x, w)
ẇ = s(w) ,
(8)
which will be seen as a cascade connection of a driven system (1) and a
driving system (2). Suppose that the forward orbit of a bounded set X × W
of initial conditions has a bounded closure. Then (see Lemma 2.1) the set
SSL = ω(X × W )
is a well-defined nonempty compact invariant set, which uniformly attracts
X × W . It is very natural to consider as “steady-state behavior” of system
(8), or – what is the same – as “steady-state behavior” of system (1) under
the family of inputs generated by (2), the behavior of the restriction of (8)
to the invariant set SSL. The set in question will be henceforth referred
to as the steady state locus of (8) and the restriction of (8) to the invariant
set SSL as the steady-state behavior of (8). In the sequel, we will provide
a number of examples illustrating the concept steady state locus in various
different situations and to discuss some of its properties.
4
4.1
Some Examples
Finite-Dimensional Linear Systems
Consider a linear time-invariant system
ẋ = Ax + Bu
y = Cx + Du
(9)
with state x ∈ Rn , input u ∈ Rm , output y ∈ Rp , forced by the input
u(t) = u0 cos(ωt)
(10)
in which u0 a fixed
vector and ω is a fixed frequency. Writing u(t) = P w(t),
with P = u0 0 and w(t) solution of
0 ω
ẇ = Sw =
w
(11)
−ω 0
with initial condition w(0) = (1 0)T , the forced response x(t) of (9), from
any initial state x(0) = x0 , to the input (10) is identical to the response x(t)
6
of the (augmented) autonomous system
ẋ = Ax + BP w
ẇ = Sw
from the initial condition
(12)
1
.
w(0) =
0
x(0) = x0 ,
To compute the response in question, various elementary methods are available. In what follows, we choose a geometric viewpoint, which is more suited
to the analysis of broader classes of examples, presented in the next sections.
Assume that all the eigenvalues of the matrix A have negative real part.
Since S has purely imaginary eigenvalues, Cn+2 can be decomposed into the
direct sum of two subspaces, invariant for (12),
Π
In×n
,
,
VS =
VA =
I2×2
02×n
in which Π is the unique solution of the Sylvester’s equation
AΠ + BP = ΠS.
By construction x̃ = x − Πw satisfies x̃˙ = Ax̃ and therefore
(13)
lim x̃(t) = lim [x(t) − Πw(t)] = 0.
t→∞
t→∞
On the other hand, since the subspace
VS is invariant for (12), if x0 = Πw0
the integral curve of x(t), w(t) of (12) passing through (x0 , w0 ) at time
t = 0 is such that x(t) = Πw(t) for all t. This curve is therefore a closed
curve and x(t), which is given by
cos(ωt) sin(ωt)
x(t) = Xw(t) = Π
w(0) ,
− sin(ωt) cos(ωt)
is a periodic solution of period T = 2π/ω. We can in this way conclude that,
for any compact set of the form W = {w ∈ R2 : kwk ≤ r} and any compact
set X ⊂ Rn , the steady-state locus of (12) is the set
SSL = {(x, w) ∈ Rn × R2 : x = Πw, kwk ≤ r} .
Note that Π can easily be computed in the following way. Rewrite (13)
in the form
0 ω
= AΠ + Bu0 1 0 .
Π
−ω 0
Split Π as Π = Π1 Π2 and multiply both sides on the right by the vector
(1 i)T to obtain
Π1 + iΠ2 = (iωI − A)−1 Bu0 .
7
4.2
Finite-Dimensional Bilinear Systems
We consider now the problem of determining the steady state response,
to the forcing input (10), of an arbitrary single-input single-output finitedimensional nonlinear system having an input-output map characterized by
a Volterra series consisting only of a finite number of terms. To this end, it
suffices to show how the response can be determined in the special case of
a Volterra series consisting of one term only, that is the case in which this
map is convolution integral of the form
Z t Z τ1
Z τk−1
w(t, τ1 , . . . , τk )u(τ1 ) . . . u(τk )dτ1 . . . dτk .
(14)
y(t) =
···
0
0
0
Since our method of determining the steady-state behavior is based on
the use of state space models, we first recall an important result about the
existence of finite dimensional realizations for an input-output map of the
form (14).
Proposition 4.1 The following are equivalent
(i) the input-output map (14) has a finite dimensional nonlinear realization,
(ii) the input-output map (14) has a finite dimensional bilinear realization,
(iii) there exist matrices A1 , A2 , . . . Ak , N12 , . . . , Nk−1,k , C1 and Bk such that
w(t, τ1 , . . . , τk ) = C1 eA1 (t−τ1 ) N12 eA2 (τ1 −τ2 ) N23 · · · Nk−1,k eAk (τk−1 −τk ) Bk .
(15)
In particular, from the matrices indicated in condition (iii) it is possible
to construct a bilinear realization of the map (14), which has the form
ẋ1 = A1 x1 + N12 x2 u
ẋ2 = A2 x2 + N23 x3 u
..
.
ẋk−1 = Ak−1 xk−1 + Nk−1,k xk u
ẋk = Ak xk + Bk u
y = C 1 x1 .
(16)
The realization in question is possibly non-minimal, but this is not an issue so far as the calculation of the steady-state response is concerned. For
8
convenience, set
x1
x2
..
.
x=
,
xk−1
xk
A1 x1 + N12 x2 u
A2 x2 + N23 x3 u
..
.
F (x, u) =
Ak−1 xk−1 + Nk−1,k xk u
A k xk + B k u
(17)
and H(x) = C1 x1 , with x ∈ Rn , which makes it possible to rewrite system
(16) can be in the form
ẋ = F (x, u)
y = H(x) .
Viewing the input (10) as u(t) = P w(t), with w(t) generated by an
exosystem of the form (11), we determine in what follows the structure of
the steady state locus of the composite system
ẋ = F (x, P w)
ẇ = Sw ,
(18)
for initial conditions ranging on a set X × W . To this end, we need the
following preliminary result (see [13]).
Lemma 4.1 Let A be an n × n matrix having all eigenvalues with nonzero
real part and let S be as in (11). Let P denote the set of all homogeneous
polynomials of degree p in w1 , w2 , with coefficients in R. For any q(w) ∈ P n ,
the equation
∂π(w)
Sw = Aπ(w) + q(w)
(19)
∂w
has a unique solution π(w), which is an element of P n .
Using this property it is possible to prove the following result (see [13]).
Proposition 4.2 Let F (x, u) be as in (17) and S as in (11). Assume that
all matrices A1 , A2 , . . . Ak have eigenvalues with negative real part. Then the
equation
∂π(w)
Sw = F (π(w), P w),
π(0) = 0
(20)
∂w
has a globally defined solution π(w), whose entries are polynomials, in w 1 , w2
of degree not exceeding k.
9
By construction, the set {(x, w) : x = π(w)} where π(w) is the solution
of (20), is a globally defined invariant set
for the system (18). Therefore, if
x0 = π(w0 ) the integral curve x(t), w(t) of (18) passing through (x0 , w0 ) at
time t = 0 is such that x(t) = π(w(t)) for all t. This curve is then a closed
curve and x(t) is a periodic solution of period T = 2π/ω. Moreover it easy
to prove the this set is globally attractive and, in particular, that for any
pair (x0 , w0 ), the solution x(t) of (18) passing through (x0 , w0 ) at time t = 0
satisfies
lim [x(t) − π(w(t))] = 0 .
(21)
t→∞
We can in this way conclude that, for any compact set of the form W = {w ∈
R2 : kwk ≤ r} and any compact set X ⊂ Rn , the steady-state locus of (18)
is the set
SSL = {(x, w) ∈ Rn × R2 : x = π(w), kwk ≤ r}} ,
4.3
Finite Dimensional Non-Linear Systems
Consider now a nonlinear system modeled by equations of the form
ẋ = f (x, u)
(22)
with state x ∈ Rn and input u ∈ Rm , in which f (x, u) is a C k function,
k ≥ 2, of its arguments with f (0, 0) = 0. Let the input function u(t) be as in
(10). Therefore, any integral curve of (22) can be seen as the x-component
of an integral curve of the autonomous system
ẋ = f (x, P w)
ẇ = Sw .
(23)
Suppose that the equilibrium x = 0 of ẋ = f (x, 0) is locally exponentially
stable. If this is the case, it is well known that for any ε > 0 there exist
numbers δ1 > 0 and δ2 > 0 such that, for any
x0 , w0 ∈ {x : kxk ≤ δ1 } × {w : kwk ≤ δ2 }
the solution x(t), w(t) of (23) satisfying x(0), w(0) = x0 , w0 satisfies
kx(t)k ≤ ε,
kw(t)k ≤ δ2
and therefore the equilibrium (x, w) of (23) is stable in the sense of Lyapunov
[9]. It is also known that system (23) has two complementary invariant manifolds through the equilibrium point (x, w) = (0, 0): a stable manifold and a
10
(locally defined) center manifold. The stable manifold is the set of all points
(x, 0) such that x belongs to the basin of attraction of the equilibrium x = 0
of ẋ = f (x, 0). The center manifold, on the other hand, can be expressed
as the graph of a C k−1 mapping x = π(w) defined on some neighborhood of
w = 0, for instance a ball of small radius r centered at w = 0. This mapping
by definition satisfies
∂π
Sw = f (π(w), P w)
(24)
∂w
and π(0) = 0.
Let x(t), w(t) be the integral curve of (23) passing through (x0 , w0 ) at
time t = 0. Since the equilibrium (x, w) = (0, 0) of (23) is stable in the sense
of Lyapunov and the center manifold in question is locally exponentially
attractive, it can be concluded, for r as above, that there exists positive
numbers δ, α, λ such that
kw0 k ≤ r
kx0 − π(w0 )k ≤ δ
⇒
kx(t)−π(w(t))k ≤ αe−λt kx0 −π(w0 )k for all t ≥ 0.
In particular, if x0 = π(w0 ), the integral curve of (23) is a closed curve and
x(t) is a periodic solution, of period 2π/ω, of
ẋ = f (x, u0 cos(ωt)) .
We can in this way conclude (as in [13]) that, for any compact set of
the form W = {w ∈ R2 : kwk ≤ r} and any compact set of the form
X = {x ∈ Rn : kx − π(w)k ≤ δ}, the steady-state locus of (23) is the set
SSL = {(x, w) ∈ Rn × R2 : x = π(w), kwk ≤ r} .
5
On the Structure of the Steady-State Locus
In Section 3, for a system of the form (8), with initial conditions in a set
X × W the forward orbit of which was assumed to be bounded, we have
suggested to define the steady-state behavior as the restriction of the system
in question to the invariant set ω(X × W ). In this section, we analyze some
properties of this set. This will be done under the additional assumption that
the set W of admissible initial conditions w(0) for (2) is a compact invariant
subset of Rr and that
W = ψ(W ) ,
i.e. that any point of W is in the ω-limit set of some (possibly different)
point of W . This assumption will be henceforth referred to as property of
Poisson stability.
11
In the present context, the assumption that ψ(W ) = W is quite reasonable. This assumption reflects, to some extent, the interest in restricting the
class of forcing inputs for (1) to inputs which possess some form of persistency in time. These are in fact the only inputs which seems reasonable to
consider in the analysis of a steady-state behavior. As a matter of fact, if
it is assumed, without much loss of generality, that the set W of admissible
initial conditions for (2) is a closed invariant set, it follows that ψ(W ) ⊂ W .
To say that ψ(W ) is exactly equal to W is simply to say that no initial condition for (2) is trivial from the point of view of the steady-state behavior,
because this initial condition is assumed to be a point in the ω-limit set of
some trajectory. In particular, it is immediate to check that this assumption
is fulfilled when any point in W is a recurrent point, i.e. whenever each
point in W belongs to its own ω-limit set, as occurs when the exosystem is
the classical harmonic oscillator.
Lemma 5.1 Suppose ψ(W ) = W . Then, for every w̄ ∈ W there is an x̄ ∈ X
such that (x̄, w̄) ∈ ω(X × W ).
Proof. To prove the Lemma, let
φ(t, x, w) :=
φx (t, x, w)
φw (t, w)
denote the flow of (8). Pick w̄ ∈ W . By hypothesis there exists w ∈ W and
a sequence of times tk , with tk → ∞ as k → ∞, such that
lim φw (tk , w) = w̄
k→∞
For any x ∈ X, consider now the sequence {φx (tk , x, w)}. Since φx (tk , x, w)
is bounded by assumption, there exists a subsequence θk , with tk → ∞ as
k → ∞, such that the sequence φx (θk , x, w) converges to some x̄. By definition (x̄, w̄) is a point in ω(X × W ). /
Thus, if the exosystem is Poisson stable, the steady-state locus is the
graph of a (possibly set-valued ) map, defined on the whole set W . Since the
notion of steady-state locus has been introduced in order to formally define
the steady-state response of a nonlinear system to families of forcing inputs,
such as those generated by the exosystem (2), there is an obvious interest in
considering the special case in which the steady-state locus is the graph of a
single-valued map
π : W → Rn
w 7→ π(w) .
12
In this case, in fact, each forcing input produces one and only one steady-state
response in (1). More precisely, for every w0 ∈ W , there is one and only one
x0 in Rn , namely x0 = π(w0 ), with the property that the response of (8) from
the initial condition (x0 , w0 ) remains in the steady-state locus for all times.
In this case, we will say that the response x(t) = π(w(t)) = π(φw (t, w0 )) is
the steady-state response of (1) to the input (2).
In the examples of Sect. 4, the steady-state locus is the graph of a map,
and a (unique) steady-state response can be defined. On the other hand,
in many of the examples in Sect. 6 which follows, multiple steady-state behaviors are possible, the convergence of the actual response to a specific one
being influenced by the initial condition of the driven system.
6
More Examples
Example 6.1 Consider the system
ẋ = −(3w 2 + 3wx + x2 )x + y
ẏ = ax − y
(25)
in which a > 0 is a fixed number and w a constant input generated by the
exosystem
ẇ = 0 .
(26)
For any fixed w, all trajectories of system (25) are ultimately bounded. In
fact, consider the positive definite function
V (x, y) =
x2 y 2
+ ,
2
2
for which
−(3w 2 + 3wx + x2 ) 1
x
V̇ (x, y) = x y
,
a
−1
y
is negative (for nonzero (x, y)) if
3w 2 + 3wx + x2 > a .
(27)
If 3w 2 > 4a, (27) holds for all x and therefore the equilibrium (x, y) =
(0, 0) is globally asymptotically stable.
13
1
1
1
0.5
0.5
0.5
0
0
0
0.5
0.5
0.5
1
1
1
1.5
1.5
1.5
2
2
1.5
1
0.5
0
0.5
2
2
1
1.5
1
0.5
0
2
2
1
1.5
1
w=√
3
1
w= √
2 3
1
1
0.5
0.5
0
0
0.5
0.5
1
1
1.5
1.5
2
2
0.5
1.5
1
0.5
0
0.5
2
2
1
2
w=√
3
1
0.5
0
0.5
1
3
w= √
2 3
1.5
1
0.5
0
0.5
1
5
w= √
2 3
Figure 1: Steady State Locus
If 3w 2 ≤ 4a, system (25) has two additional equilibria, namely the two
points (xw− , axw− ), (xw+ , axw+ ) in which xw− and xw+ are the two real roots of
3w 2 + 3wx + x2 = a. Note, in particular, that if 3ω 2 = a, one of these two
equilibria coincides with the equilibrium at (0, 0), while if 3ω 2 = 4a, these
two (nonzero) equilibria coincide.
If 3w 2 ≤ 4a, (27) holds for all (x, w) but those such for which x ∈
[xw− , xw+ ]. Set now Ωc = {(x, y) : V (x, y) ≤ c} and, for any w pick any
c > 0 such that
{(xw− , axw− )} ∪ {(xw+ , axw+ )} ⊂ int(Ωc ) .
By construction, V̇ (x, y) < 0 on the boundary on Ωc and at all points of
R2 \ Ωc . Thus, all trajectories, in finite time, enter the compact set Ωc , which
is positively invariant. Moreover, by Bendixson’s criterion, it is possible to
deduce that there are no closed orbits entirely contained in Ωc because
∂
∂
(−(3w 2 + 3wx + x2 )x + y) +
(ax − ε−1 y) = −3(x + w)2 − 1 < 0
∂x
∂y
14
at each point of Ωc .
2
y 0
-2
2
2
0
w
0
-2
-2
x
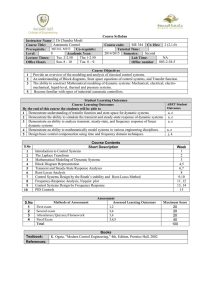
Figure 2: Steady State Locus
From this analysis it is easy to conclude what follows. For any pair of
compact sets
X = {(x, y) : max{|x|, |y| ≤ r}
W = {w : |w| ≤ r} ,
the positive orbit of X × W is bounded. Moreover, for large r, if 3w 2 > 4a,
the set
SSLw = ω(X × W ) ∪ (R2 × {w}) ,
i.e. the intersection of ω(X × W ) with the plane R2 × {w} reduces to just
one point, namely the point (0, 0, w). On the other hand, if 3w 2 ≤ 4a, the set
SSLw is a 1-dimensional manifold with boundary, diffeomorphic to a closed
interval of R. Different shapes of these sets, for various values of w, are
shown in Fig. 1 and a collection of these curves are depicted as a surface in
Fig. 2.
Example 6.2 Consider now the system
ẋ = y
x2 x4 y 2 1
+
+ −w
ẏ = x − x3 − y − +
2
4
2
4
(28)
in which w is a constant input generated by the exosystem (26). For any fixed
w, this system has three equilibria, at (x, y) = (0, 0) and (x, y) = (±1, 0). We
show now that, for any fixed w, all trajectories of system (28) are ultimately
bounded. In fact, consider the positive semi-definite function
V (x, y) = −
x2 x4 y 2 1
+
+
+
2
4
2
4
15
which is zero only at the two equilibria (x, y) = (±1, 0) and such that, for
any c > 0, the sets Ωc = {(x, y) : V (x, y) ≤ c} are bounded. Note that
V̇ (x, y) = −y 2 (V (x, y) − w) .
w=−
w=
1
8
1
4
w=
1
8
w=
1
2
Figure 3: Steady State Locus
If w ≤ 0, V̇ (x, y) ≤ 0 for all (x, y) and therefore, by LaSalle’s invariance
principle, all trajectories which start in R2 converge to the largest invariant
set contained in the locus where y = 0, which only consists of the union of
the three equilibria.
If w > 0, V̇ (x, y) ≤ 0 for all (x, y) in the set {(x, y : V (x, y) ≥ w}. Thus,
again by LaSalle invariance principle, all trajectories which start in the set
{(x, y : V (x, y) ≥ w} converge to the largest invariant set contained in the
locus where either y = 0 or V (x, y) = w. Since the locus V (x, y) = w, the
boundary of Ωw , is itself invariant and the two equilibria (x, y) = (±1, 0) are
in Ωw , it is concluded that all trajectories which start in R2 \ Ωw converge
either to the boundary of Ωw or to the equilibrium (x, y) = (0, 0). On the
other hand, the boundary of Ωw , for 0 < w < 1/4 consists of two disjoint
16
close curves while for 1/4 ≥ w it consists of a single closed curve (a “figure
eight” for w = 1/4).
From this analysis it is easy to conclude what follows. For any pair of
compact sets
X = {(x, y) : max{|x|, |y| ≤ r}
W = {w : |w| ≤ r} ,
the positive orbit of X × W is bounded. Moreover, for large r, if w ≤ 0, the
set
SSLw = ω(X × W ) ∪ (R2 × {w}) ,
i.e. the intersection of ω(X × W ) with the plane R2 × {w} is a 1-dimensional
manifold with boundary, diffeomorphic to a closed interval of R. If 0 < w <
1/4, the set SSLw is the union of a 1-dimensional manifolds diffeomorphic
to R and of two disjoint 2-dimensional manifold with boundary, each one
diffeomorphic to a closed disc. If 1/4 ≤ w, the set SSL w is a 2-dimensional
manifold with boundary, diffeomorphic to a closed disc for 1/4 < w, or to a
“filled figure eight” for w = 1/4. Different shapes of these sets, for various
values of w, are shown in Fig. 3.
Example 6.3 Consider the system
ẋ = −x3 + u
(29)
driven by an input u = w1 generated by the harmonic exosystem (11), in
which for convenience we set ω = 1.
To establish boundedness of trajectories, observe that the positive definite
function
V (x) = x2
satisfies
V̇ = −2x4 + 2xw1 ≤ −2|x|(|x|3 − |w1 |)
from which it is concluded that system (29) is input-to-state stable (see [11];
in fact, V̇ < 0 whenever |x| > |w1 |1/3 ). Hence, since w1 (t) is always bounded,
then also x(t) is always bounded.
For any A > 0, trajectories of (29) – (11) satisfying kw(0)k = A evolve
on the cylinder
CA = {(x, w) : kwk = A} .
Using standard arguments based on the method of Lyapunov it is easy to see
that these trajectories in finite time enter the compact set
KA = {(x, w) : |x| ≤ 2A1/3 , kwk = A}
17
which is positively invariant. Hence, by the Poincaré-Bendixson Theorem,
the ω-limit sets of all such trajectories consist of either equilibria, or closed
orbits, or open orbits whose α- and ω-limit sets are equilibria. Equilibria
clearly can exist only if w0 = 0, in which case there is a unique equilibrium
at x = 0. Suppose there is a closed orbit in KA . Since w(t) is a periodic
function of period 2π, a simple argument based on uniqueness of solutions
shows that the existence of a closed orbit in KA implies the existence of a
nontrivial periodic solution, of period 2π, of the equation
ẋ(t) = −[x(t)]3 + w1 (t) .
Let
φ(t, x, w) :=
(30)
φx (t, x, w)
φw (t, w)
denote the flow of (11) – (29). Existence of a periodic orbit of period 2π is
equivalent to the existence of x0 satisfying
x0 = φx (2π, x0 , w0 ) .
(31)
Bearing in mind the fact that
dφx
(t, x, w) = −[φx (t, x, w)]3 + w1
dt
(32)
take the derivatives of both sides with respect to x, to obtain
∂φ d ∂φx x
(t, x, w) = −3[φx (t, x, w)]2
(t, x, w) .
dt ∂x
∂x
Integration over the interval [0, 2π] yields
Z 2π
∂φx
2
−3[φx (τ, x, w)] dτ
(2π, x, w) = exp
∂x
0
because
∂φx
(0, x, w) = 1 .
∂x
Suppose w0 6= 0. Since by hypothesis (x0 , w0 ) produces a nontrivial periodic solution of (30), φx (τ, x0 , w0 ) cannot be identically zero, and we deduce
from the previous relation that
0<
∂φx
(2π, x0 , w0 ) < 1 .
∂x
Hence, any nontrivial periodic solution of (30) is locally exponentially stable.
We conclude from this that (see Sect. 7), for any fixed w0 6= 0, there is a
18
unique x0 satisfying (31). This equation implicitly defines a unique function
π : R2 → R . This function is smooth on R2 \ {0}, but just continuous at
w = 0, where the implicit function theorem cannot be used, because at this
point we have
∂φx
(2π, 0, 0) = 1.
(33)
∂x
To show that π(w) in not C 1 at w = 0, take the derivatives of both sides
of (32) with respect to w1 , to obtain
∂φ d ∂φx x
(t, x, w) = −3[φx (t, x, w)]2
(t, x, w) + 1 .
dt ∂w1
∂w1
Integration over the interval [0, 2π] yields
2
Z 2π
∂φx
∂φx
3[φx (τ, x, w) dτ ]
(2π, x, w) = exp −
(0, x, w)
∂w1
∂w
1
0
Z
Z
2π
2π
+
0
Now,
exp −
2
3[φx (σ, x, w)] dσ dτ.
τ
∂φx
(0, x, w) = 0
∂w1
by definition of φx (t, x, w). Moreover, φx (σ, 0, 0) = 0. Thus, we deduce from
the relation above that
∂φx
(2π, 0, 0) = 2π.
(34)
∂w1
Now, observe that, if there was a continuously differentiable map π̂(w)
satisfying
π̂(w) = φx (2π, π̂(w), w)
the following would hold
∂ π̂
∂φx
∂ π̂
∂φx
=
(2π, π̂(w), w)
+
(2π, π̂(w), w).
∂w1
∂x
∂w1 ∂w1
(35)
Evaluating this at (π̂(w), w) = (0, 0) and bearing in mind (33), this would
yield
∂φx
(2π, 0, 0) = 0
∂w1
which contradicts (34).
19
Figure 4: Steady State Locus
We have in this way found a characterization identical to that described
in Sect. 4.3, in a case, though, in which the equilibrium x = 0 of the driven
system is not locally exponentially stable. For any compact set of the form
W = {w ∈ R2 : kwk ≤ r} and any compact set of X = {x ∈ R : |x| ≤ r},
the steady state locus is the a graph of a map
SSL = {(x, w) ∈ R × R2 : w = π(w), kwk ≤ r} ,
which is depicted in Fig. 4.
Example 6.4 Consider the system
ẋ = x − (x + u)3 + u3
(36)
driven by an input u = w1 generated by the harmonic exosystem (11), in
which for convenience we set ω = 1.
System (36) is not input-to-state stable, because the equilibrium at (x, w 1 ) =
0 is unstable. Nevertheless, trajectories are ultimately bounded. In fact, consider the candidate Lyapunov function
V (x) = x2
for which we obtain, after a simple algebra,
V̇ = −2V [x2 + 3xw1 + 3w12 − 1].
Since
|x| > 2
⇒
x2 + 3xw1 + 3w12 − 1 > 0
we conclude that V̇ < 0 so long as V > 4.
20
(37)
As in the previous example, for any A > 0, trajectories of (36) – (11)
satisfying kw(0)k = A evolve on the cylinder CA and, as shown by means of
standard arguments based on the method of Lyapunov, in finite time enter
the compact set
KA0 = {(x, w) : |x| ≤ 3, kwk = A}
which is positively invariant. Hence, by Poincaré-Bendixson’s Theorem, the
ω-limit sets of all such trajectories consist of either equilibria, or closed orbits,
or open orbits whose α- and ω-limit sets are equilibria. Equilibria clearly can
exist only if w0 = 0, and these are the three points at which x = 0, −1, +1.
If w0 6= 0, there are only closed orbits in KA0 , which will be analyzed in the
following way.
First of all, we observe that the set x = 0 is an invariant set for the
system (36) – (11). This set is filled with closed orbits, namely those of the
exosystem (11). One may wish to determine the local nature of these closed
orbits, by looking at the linear approximation of the system. Since x(t) = 0
on these orbits, all that we have to do is to study the local stability properties
of the equilibrium x = 0 of the periodically varying system
ẋ = −(x + w1 (t))3 + x + w13 (t) .
The linear approximation about the equilibrium solution x = 0 is the
periodic linear system
ẋδ (t) = −(3w12 (t) − 1)xδ
which is exponentially stable (respectively, unstable) if
Z
2π
0
(3w12 (τ ) − 1)dτ > 0
(respectively, < 0).
Recalling that A = kw(0)k, wepsee that the above condition holds if and
only if 3A2 π − 2π > 0, i.e. A > 2/3. We conclude therefore that, on the
plane x = 0, the closed orbits of (36) – (11) inside the disc of radius A =
p
2/3 are unstable, while those outside this disc are locally asymptotically
stable.
To determine existence and nature of the nontrivial closed orbits, i.e.
those which do not lay inside the plane x = 0, we proceed as follows. Integrating the differential equation (37) we obtain
Z t
2
2
V (t) = exp −2 [x (τ ) + 3x(τ )w1 (τ ) + 3w1 (τ ) − 1]dτ V (0) .
0
21
As before, let
φ(t, x, w) :=
φx (t, x, w)
ψw (t, w)
denote the flow of (36) – (11) and observe that, since
V (t) = [φt (x, w)]2
the function φx (t, x, w) satisfies
Z t
2
2
φx (t, x, w) = exp − [x (τ ) + 3x(τ )w1 (τ ) + 3w1 (τ ) − 1 dτ ]φx (0, x, w)
0
where for convenience we have written x(τ ) for φx (τ, x, w), under the sign of
integral. In particular,
Z 2π
2
2
[x (τ ) + 3x(τ )w1 (τ ) + 3w1 (τ ) − 1]dτ x.
φx (2π, x, w) = exp −
0
Along a nontrivial closed orbit, φx (2π, x0 , w0 ) = x0 for some nonzero (x0 , w0 ),
i.e.
Z
2π
0
[x2 (τ ) + 3x(τ )w1 (τ ) + 3w12 (τ ) − 1]dτ = 0,
and hence
3
Z
2π
2
0
x(τ )w1 (τ )dτ = 2π − 3A π −
Z
2π
x2 (τ )dτ.
(38)
0
Bearing in mind the fact that
dφx
(t, x, w) = −[[φx (t, x, w)]2 + 3φx (t, x, w)w1 (t) + 3w12 (t) − 1]φx (t, x, w)
dt
take the derivatives of both sides with respect to x, to obtain
d ∂φx ∂φx
(t, x, w).
(t, x, w) = −[3x2 (t) + 6x(t)w1 (t) + 3w12 (t) − 1]
dt ∂x
∂x
Integration over the interval [0, 2π] yields
Z 2π
∂φx
(2π, x, w) = exp[−
[3x2 (τ ) + 6x(τ )w1 (τ ) + 3w12 (τ ) − 1]dτ ]
∂x
0
because
∂φx
(0, x, w) = 1.
∂x
22
Suppose now that φx (2π, x0 , w0 ) = x0 for some nonzero x0 . Using (38) we
obtain
Z 2π
∂φx
2
(2π, x0 , w0 ) = exp[−2π + 3A π −
x2 (τ )dτ ].
∂x
0
p
If A < 2/3 we have
∂φ2π
0<
(x0 , w0 ) < 1.
∂x
p
We have shown in this way that, for A < 2/3,
φx (2π, x0 , w0 ) = x0
⇒
∂φx
(2π, x0 , w0 ) < 1.
∂x
p
and this proves that, if A <
2/3, any nontrivial closed orbit is p
locally
exponentially stable. This completes the analysis for the case A < 2/3.
Having shown that all trajectories enter the positively invariant set K A0 , in
which there are no equilibria and an unstable closed orbit on the plane x = 0,
we conclude that there are two (and, see Sect. 7, only two) nontrivial closed
orbits in KA0 , one occurring in the half space x > 0, the other occurring in
the half space x < 0.
From this analysis it is easy to conclude what follows. For any pair of
compact sets
X = {(x, y) : max{|x|, |y| ≤ r}
W = {w : |w| ≤ r} ,
the positive orbit of X × W is bounded. Moreover, for large r, if A ≥
the set
SSLA = ω(X × W ) ∪ CA ,
p
2/3,
reduces to just one closed curve,
p namely the curve {(x, w) : x = 0, kwk = A}.
On the other hand, if A < 2/3, the set SSLA is a 2-dimensional manifold
with boundary, diffeomorphic to a set I × S1 , in which I a closed interval of
R. Different shapes of these sets, for various values of A, are shown in Fig.
4.
23
Figure 5: Steady State Locus
7
On the Existence and Uniqueness of Periodic Steady-State Responses
For the purpose of output regulation, we will research the steady-state response of systems defined by (1)-(2). Since the error should asymptotically
vanish, stability properties, as well as in the uniqueness, of the steady-state
response are important. For these reasons, we are particularly interested in
results, for reasonable classes of systems, which would assert that local stability implies global uniqueness. In this section, we shall illustrate such a
result for forced oscillations in dissipative systems, following the earlier work
of Levinson, Pliss, Krasnosel’ski and Hale. Recall, the system
ẋ = f (x, t),
f (x, t + T ) = f (x, t)
is dissipative if there exists R > 0 such that limt→∞ kx(t; x0 , t0 )k < R. Define
F : Rn → Rn via F (x0 ) = x(T ; x0 )
For a dissipative system there exists a ball H = {x : kxk < h} and a
natural number k(a) such that for k > k(a)
F k (H) ⊂ H .
so that by Brouwer’s Fixed Point Theorem there exists a periodic orbit.
Control theoretic examples of systems which are dissipative abound and
include systems having a globally exponentially stable equilibrium, forced
24
with a periodic input. More generally, any input-to-state stable system [11],
forced with a periodic input, is dissipative. For any such system, Lyapunov
theory applies and there exists a function V satisfying
hgradV (x), f (x, t)i < 0 for kxk 0 .
In this context, we can adapt the work of Krasnosel’ski [12] to rigorously
formulate the notion that local stability implies global uniqueness. On the
toroidal cylinder Rn × S 1 we have a “Lyapunov can” V −1 (−∞, c]. We are
interested in zeros of the “translation field”
ψ(t, τ, x0 ) = x0 − x(t, τ, x0 )
when τ = 0, t = T . In this setting, Krasnosel’ski’s main observations are:
(i) For each s and all x ∈ V −1 (c), f (x, s) is nonsingular and ψ(t, s, x) is
nonsingular for 0 ≤ t − s ∞.
(ii) f (x, s) and ψ(t, s, x) do not point in the same direction. Therefore,
there is a homotopy
ψ(t, s, x) ∼ −f (x, s)
(iii) ψ(t, s, x) ∼ −f (x, s) for t ≥ s whenever ψ(τ, s, x) 6= 0 for s ≤ τ ≤ t.
(iv) Since V̇ < 0 holds, ψ(t, s, x0 ) 6= 0 for t ≥ s.
(v) Therefore ψ(T, 0, x) ∼ −f (x, 0).
Thus, for ψ(T, 0, x0 ) = x0 − x(T, 0, x0 ) = x0 − P(x0 ), we have
indV −1 (c) (ψ(T, 0, ·)) = indV −1 (c) (−f (·, 0))
and by the Gauss-Bonnet Theorem
indV −1 (c) (−f ) = indV −1 (c) (n) = 1
since V −1 (−∞, c] is contractible. If all the zeros of ψ are hyperbolic, then
the local index of ψ near x0 satisfies
indx0 (ψ) = sign det(I − DP(x0 ))
so that by Stokes’ Theorem
X
γ
periodic
sign det(I − DP(x0 )) = +1.
25
In particular, if x0 is asymptotically stable and hyperbolic
sign det(I − DP(x0 )) = 1
and therefore, if each periodic orbit is exponentially orbitally stable
#γ · 1 = 1 or #γ = 1 .
It then follows that the local exponential stability of each periodic orbit
implies global uniqueness. We conjecture that this assertion remains valid
when the orbits are critically asymptotically stable.
We remark that when uniqueness holds, the steady state-locus will be
the graph of a function π(w) and that invariance, where π is smooth, will be
characterized by a partial differential equation, as in center manifold theory.
In the local theory, this pde is often used to find or approximate π. In general,
one would expect that π is a viscosity solution.
Finally, we note that the arguments above are reminiscent of averaging
and that, indeed, one can use these methods to prove the basic averaging
theorems.
References
[1] Byrnes C.I., Isidori A. (1984), A Frequency Domain Philosophy for
Nonlinear Systems, with Applications to Stabilization and to Adaptive
Control, Proc. of 23rd IEEE Conf. on Decision and Control, Las Vegas.
[2] Isidori A., Byrnes C.I., (1990), Output regulation of nonlinear systems,
IEEE Trans. Aut. Control, AC-35, 131–140.
[3] Byrnes C.I., Isidori A. (1991), Asymptotic stabilization of minimum
phase nonlinear systems, IEEE Trans. Aut. Control, AC-36, 1122–
1137.
[4] Byrnes C.I., Isidori A. (2000), Bifurcation analysis of the zero dynamics
and the practical stabilization of nonlinear minimum-phase systems,
Asian Journal of Control, 4, 171-185.
[5] Byrnes C.I., Isidori A., Willems J.C. (1991), Passivity, feedback equivalence, and the global stabilization of minimum phase nonlinear systems,
IEEE Trans. Autom. Contr., AC-36, 1228–1240.
[6] Davison E.J. (1976), The robust control of a servomechanism problem
for linear time-invariant multivariable systems, IEEE Trans. Autom.
Control, 21, 25–34.
26
[7] Francis B.A. (1977), The linear multivariable regulator problem, SIAM
J. Contr. Optimiz., 14, 486–505.
[8] Francis B.A., Wonham W.M. (1976), The internal model principle of
control theory, Automatica, 12, 457–465.
[9] Hahn W. (1967), Stability of Motion, Springer-Verlag, New York.
[10] Hale J.K., Magalhães L.T., Oliva W.M. (2001) Dynamics in Infinite
Dimensions, Springer Verlag (New York).
[11] Sontag E.D. (1995), On the input-to-state stability property, European
J. Contr., 1, 24–36.
[12] Krasnosel’skiĭ, M.A., Zabreĭko, P.P.,(1984) Geometric Methods of Nonlinear Analysis, Springer-Verlag Berlin Heidelberg New York Tokyo.
[13] Byrnes, C.I., Delli Priscoli, F., Isidori, A. , (1997) Output Regulation
of Uncertain Nonlinear Systems, Birkhäuse, Boston Basel Berlin.
27