An example of positive feedback op amp circuit: Schmitt Trigger In
advertisement

An example of positive feedback op amp circuit: Schmitt Trigger
In real OA imperfections cause Vd to have a small value:
If Vd > 0 ⇒ VO ↑
If Vd < 0 ⇒ VO ↓
Page 59 of 113
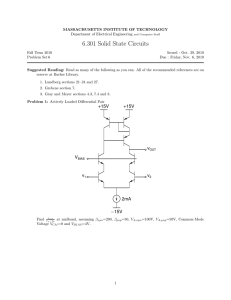
Let’s assume VSUPPLY = ± 5V
Page 60 of 113
Op Amp Imperfections
a. Voltage Supply Limits (Saturation)
For a real op amp, clipping occurs if the output voltage reaches
certain limits.
Page 61 of 113
b. Output Current Limit (Short-Circuit Output Current ISC)
• The current that an op amp can supply to a load is limited (typically
+/-25 mA)
• If a small-value load draw a current outside the limit, the output
waveform becomes clipped
Example:
Page 62 of 113
Ideally,
This means, the op amp should provide 205 mA, which is higher than
the 25mA the op amp can really issue.
In practice:
Thus, as soon as the output voltage reaches ±2.44 V (which corresponds
to an input voltage of ±2.44/4 ≈ ±0.61 V) the output voltage gets clipped.
Page 63 of 113
Example:
Page 64 of 113
In this case the OA has no problem to provide the current required to
produce an output voltage up to ±20V.
Unfortunately, as soon as the value of Vo gets larger than ±12V (which
correspond to an input voltage value of Vin =12/4 = 3V), the output is
still going to be clipped. This time the reason is not the OA current limit,
but the OA supply limit.
Because of that, the max current that the op amp is really going to
provide is only:
Page 65 of 113
c. CMRR
Page 66 of 113
Page 67 of 113
Page 68 of 113
Page 69 of 113
d. Non Linearity
Page 70 of 113
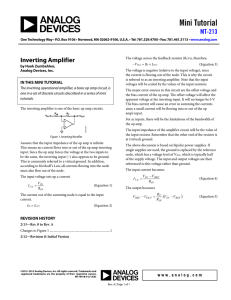
e. DC offset voltage
Offset is caused by the fact that the internal circuit of the op amp
experiences fabrication mismatches.
As a result the op amp is not perfectly balanced, i.e.:
VO≠0 when Vin1=Vin2
Offsets arise from input stage mismatch and cause the input-output
characteristic to shift in either the positive or negative direction (the plot
displays positive direction).
We model the offset by a single voltage source placed in series with one
of the inputs.
Since offsets are random can be positive or negative, Vos can appear at
either input with arbitrary polarity.
Page 71 of 113
Why are DC offsets important?
• Can cause unacceptable accuracy errors
• Can cause saturation
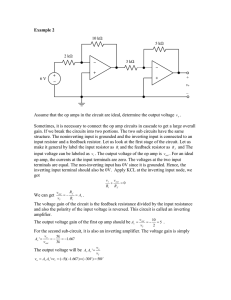
Example: Effects of DC offset (Accuracy Error)
Vout
R1
(Vin + Vos )
= 1 +
R2
The op amp amplifies the input as well as the offset, creating errors.
Let’s assume we have a weighting station that uses an electronic
pressure meter whose output is amplified by the circuit shown, and the
pressure meter generates 20mV for every 100 Kg.
If the op amp has an offset of Vos = 2mV, this correspond to an error of
±10Kg.
Example: Effects of DC offsets (Saturation)
Page 72 of 113
The first op amp has an offset of 2 mV. What happens at the output?
A1 = 1 + 104/102 ≈ 100
A2 = 1 + 104/102 ≈ 100
Av = Vout/Vin = A1 ⋅ A2 ≈ 104
The first stage will amplify the offset by a factor of 100 generating a DC
level of 200 mV at node X.
At this point, the second stage amplifies VX by another factor of 100,
attempting to generate Vout=20V.
Since the op amps have a supply voltage of 3V the Vout cannot exceed
this value and the second op amp will saturate.
Example: effects of DC offsets on the ideal integrator (saturation)
Page 73 of 113
In other words, the circuit integrates the offset, generating an output that
tends to +∞ (in reality the positive supply voltage) or –∞ (in reality the
negative supply voltage) depending on the sign of Vos.
It is worth to notice that if we model the offset placing a voltage source
in series with the negative input instead of the positive input the specific
“formulae” may change but the “physical effect is the same.
Page 74 of 113
To avoid the saturation problem caused by the offset, we can modify the
integrator circuit as follow:
The idea is to place a resistor in parallel with the capacitor to “absorb”
the offset.
Since Vos is a DC its effect at the output is given by:
For example if Vos = 2mV and R2/R1=100, then Vout contains a dc error
of 202 mV, but at least does not saturate.
However, the presence of R2 also affects the integration function. The
closed-loop transfer function has no longer has a pole at origin. Now the
circuit contains a pole at −1/(R2⋅C1)
Vout
R
1
=− 2
Vin
R1 R2C1s + 1
Page 75 of 113
In summary:
• R2/R1 must be sufficiently small to minimize the effect of the
offset
• R2⋅C1 must be sufficiently large so as to negligibly impact the input
signal frequencies of interest
Commonly used offset voltage nulling circuits
Universal offset voltage balancing schemes:
It is possible to build many reasonable balancing circuits. Few examples
follow.
(a) Inverting Configuration
Page 76 of 113
For R3 >> R1:
Thus:
(b) Non Inverting configuration
Page 77 of 113
Alternative scheme:
(c) Mixed configuration
In general, there are many reasonable balancing circuits that can be built.
Ad-Hoc offset voltage balancing schemes:
Many op-amp manufacturers provide extra terminal for offset nulling.
Page 78 of 113
General Offset Nulling Procedure:
1. build the circuit you want to implement
2. put the input terminals to ground
3. move the POT wiper until Vout is zero
NOTE: offset balancing is usually done after the circuit has been
working for a couple of hours!!!
f. Input Bias (=DC) Currents
In order for the op amp to operate the two input transistors of differential
stage have to be biased.
As a result there may be dc currents flowing into the inputs of the op
amp:
• For op amps implemented in bipolar technology there is always a
dc base current drawn (0.1-1 µA) from each input
• For op amp implemented in MOS technology there almost no dc
currents.
The input bias currents create inaccuracies in the circuits.
The error due to the input bias currents appear similar to the dc voltage
offset effect (i.e., corrupt the output of the op amp). However, unlike the
dc voltage offset, this phenomenon is not random.
The effect of bipolar base currents can be modeled as current sources
tied from the input to ground.
Page 79 of 113
Usually two parameters are specified to describe this op amp
imperfection:
• The average value of IB1 and IB2
• The expected difference
a. Effect of the dc input currents on the non inverting configuration
Page 80 of 113
Setting Vin=0 (no signal applied) the circuit reduces as follows:
Since the + terminal is at ground then the node X is at virtual ground.
As a result there is a zero voltage across R2, which means no current
will flow through R2, so all current IB2 flows through R1:
Vout = IB2R1
The error due to the bias current appears similar to the dc voltage offset
effect.
Then, a reasonably simple method for canceling this error seems to be
the application of a DC correction voltage in series with the positive
terminal.
R1
Vout = Vcorr 1 + + I B 2 R1
R2
Page 81 of 113
In order to produce a zero output it must be:
R1
0 = Vcorr 1 + + I B 2 R1
R2
In other words:
If we assume that nominally IB1=IB2 obtaining Vcorr and canceling the
effect of the bias currents for the non inverting amplifier becomes
quite simple:
I B1 = I B 2
Page 82 of 113
b. Effect of the dc input currents on the inverting configuration
Canceling the effect of the bias currents for the non inverting
amplifier
c. Effect of bias currents on the unity gain amplifier and its cancellation
There is no effect on the non inverting configuration (thus no need for
cancellation)
Page 83 of 113
d. Effect of bias currents on the summing amplifier and its cancellation
e. Effect of input bias currents on integrator
Page 84 of 113
Since IB2 is a DC current it will flow all through R1:
Input bias current will be integrated by the integrator and eventually
saturate the amplifier.
V out
1
= −
R 1C 1
t
∫ (−
I
B 2
R 1 )dt
0
If we assume that IB2=IB1 by placing a resistor in series with the positive
input, integrator input bias current can be cancelled.
Page 85 of 113
In reality, the output still saturates due to other effects such as the DC
voltage offset, mismatch between IB1 and IB2, and mismatch between the
resistors.
To avoid saturation we can use the “non ideal” integrator circuit:
In this case the presence of R2 makes the op amp work in closed loop for
the DC. As a result the negative input is at virtual ground, so all IB2 will
flow in R2.
Page 86 of 113
* Detailed analysis of the error caused by the DC bias currents:
A straightforward way of assessing the effect of the input bias currents is
to find the output with all input signals set to zero.
IB =
I BP + I BN
2
I OS = I BP − I BN
To analyze in detail the effect of the error caused by the DC bias
currents, let’s consider the inverting configuration:
Expand (**):
Page 87 of 113
Substitute (*) in:
Let’s now consider:
Page 88 of 113
Let’s now substitute in (♦):
And if we impose RP = R1||R2 the term involving IB will be eliminated,
leaving:
R
VO = −1 + 1 ⋅ ( R1 || R2 ) ⋅ I OS
R2
Which is a quite small quantity since it is proportional to IOS
(IOS = IP−IN ≈ 0)
Page 89 of 113
g. Speed Limitations
• Finite Bandwidth (“Small Signal” Speed)
• Slew Rate (“Large Signal” Speed)
Finite Bandwidth (“Small Signal” Speed)
Because of its internal capacitances, the gain of the op amp begins to fall
as the frequency of operation exceeds a certain break value.
The internal circuitry of the op amp can be modeled (approximated) by a
first-order (one pole) system:
Vout
(s ) = Vout (s) = A0s
Vin1 − Vin 2
Vd ( s ) 1 +
2πf1
Page 90 of 113
• At frequencies well below the break frequency (s/ω1 << 1):
• At frequencies well above the break frequency (s/ω1 >> 1):
and since the op amp gain falls to unity at ωu:
Having a “loop” around the op amp (inverting, non-inverting, etc) helps
to increase the bandwidth of the system, however, it also decreases the
gain (Bandwidth and Gain Tradeoff)
Non-inverting Amplifier Example: (Bandwidth – Gain Tradeoff)
Page 91 of 113
Page 92 of 113
Graphically:
In conclusion: we can trade gain for bandwidth and vice versa
Page 93 of 113
Slew Rate (“Large Signal Speed”)
Slew rate is a non linear phenomenon.
Let’s consider a non inverting configuration and its small signal voltage
transfer function:
Then for simplicity, let’s make the configuration into a voltage follower
(R2=∞):
Page 94 of 113
Applying to the input of a follower a voltage step of sufficiently small
amplitude VP will result in an exponential response:
The rate at which Vout changes with time is highest at the beginning of
the exponential transition.
If we increase VP the rate at which the output slews will have to increase
accordingly.
In practice, we observe that the rate at which the output voltage changes
(i.e. the output slope) cannot exceed a certain limit called the slew rate
(= SR).
Page 95 of 113
If the input is small (linear region), when the input doubles then the
output and the output slope also double. However, when the input is
large, the op amp slews.
Slew rate limiting is a non linear effect due to the limited ability of the
internal circuitry to charge or discharge the internal capacitance.
Page 96 of 113
As long as the input step amplitude VP is sufficiently small, the op amp
will respond in proportion (i.e., linearly) and yield:
However, if we overdrive the op amp applying a large input voltage, the
Iout will saturate at ±ITAIL.
Then the capacitor C will become current starved and the speed of the
op amp is further limited.
Page 97 of 113
The non linearity effect of slew rate can also be observed by applying a
large sine wave to the circuit.
R1
dVout
= VP 1 + ω cos ωt
dt
R2
dVout
dt
max
R1
= VP 1 + ω
R2
Page 98 of 113
• As long as the output slope is less than the slew rate, the op amp can
avoid slewing.
• However, as operating frequency and/or amplitude is increased, the
slew rate becomes insufficient and the output becomes distorted.
Full-Power Bandwidth (ωFP)
To determine the maximum frequency before op amp slews, we assume
the op amp produces its maximum allowable voltage swing without
saturating (worst case scenario).
Vout =
Vmax − Vmin
V + Vmin
sin ωt + max
2
2
If the op amp provides a slew rate of SR:
SR =
dVout
dt
Then in conclusion:
=
max
Vmax − Vmin
2
ωFP =
SR
Vmax − Vmin
2
Page 99 of 113
h. Finite Gain, Finite Input Impedance and non-zero Output
Impedance
Actual op amps do not provide infinite gain, infinite input impedance
(MOS based op amps have a very high input impedance at low
frequencies), and non-zero output impedance.
The effect of these limitations is to increase the “gain error” of the
circuit.
Page 100 of 113
Let’s consider the effects of finite gain, finite input impedance, and nonzero output impedance on a non-inverting configuration:
Voltage Gain Derivation:
vd = vi − vN
vi − vN vO − vN vN
+
=
rd
R1
R2
vO − A0vd vO − vN
=
rO
R1
Page 101 of 113
AV =
vO
vi
Matlab Code:
clear all; close all; clc;
syms Vout Vin VN Rd Ro R1 R2 Ao Vd;
s = solve( (Vin-VN)/Rd+(Vout-VN)/R1-VN/R2,(Vout-Ao*(Vin-VN))/Ro-(VoutVN)/R1,Vin,Vout);
Vin = s.Vin;
Vout = s.Vout;
AV=Vout/Vin;
fprintf('AV = ');
pretty(AV);
IdealAV = limit(AV,Ao,inf);
disp('IdealAV = ');
pretty(IdealAV);
AV =
Rd R1 Ao - R2 Ro + Rd R2 Ao
-----------------------------------------------R1 R2 + Rd R2 + Rd R1 - Rd Ro - R2 Ro + Rd R2 Ao
IdealAV =
R1 + R2
------R2
Page 102 of 113
Input Resistance Derivation:
vi − vN vN A0 (vi − vN ) − vN
−
+
=0
rd
R2
R1+ ro
ii =
vi − vN
rd
Rin =
vi
ii
Matlab Code:
clear all; close all; clc;
syms VN Rd Ro R1 R2 Ao;
% Ax = b ; x(1) = Vt, x(2) = It
A = [1 -Rd ; 1/Rd+Ao/(R1+Ro) 0];
b = [VN ; VN*(1/Rd+1/R2+Ao/(R1+Ro)+1/(R1+Ro))];
x = A\b;
Rin = x(1)/x(2);
disp('Rin = ');
pretty(Rin);
IdealRin = limit(Rin,Ao,inf);
disp('IdealRin = ')
pretty(IdealRin);
Rin =
IdealRin =
R2 R1 + R2 Ro + Rd R1 + Rd Ro + Ao Rd R2 + Rd R2
-----------------------------------------------R1 + Ro + R2
signum(Rd) signum(R2) Inf
------------------------signum(R1 + Ro + R2)
Page 103 of 113
Output Resistance Derivation:
vx − vN A0vd − vx ) − vN
ix =
−
=0
R1
ro
vN =
vx − vN
(rd || R2 )
R1 + r d || R2
vd = −vN
Rout =
vx
ix
Page 104 of 113
Matlab Code:
clear all; close all; clc;
syms Vd VN Ix Vx Ro R1 Rp Ao
s = solve('Vd=-VN', 'Ix +(-Ao*VN-Vx)/Ro-(Vx-VN)/R1 = 0', 'VN=Vx*Rp/(R1+Rp)',
'Vd', 'Ix', 'Vx');
Vx = s.Vx;
Ix = s.Ix;
Rout=Vx/Ix;
fprintf('Rout = ');
pretty(Rout);
IdealRout = limit(Rout,Ao,inf);
disp('IdealRout = ');
pretty(IdealRout);
Rout =
(R1 + Rp) Ro
-------------------R1 + Rp Ao + Rp + Ro
IdealRout =
0
Page 105 of 113
Example 8.16
A student has an OA with Ao=10000, Rout=1Ω and want to design an
inverting amplifier with R1=50Ω and R2=10Ω. The amplifier fails to
provide the output swing of 2V we need. Why?
_____
40 mA is a quite big current and many op amps provide only a very
small output current
Page 106 of 113
Example 8.17
Design an inverting amplifier with a nominal gain of 4 a gain error of
0.1% and a nominal input impedance of at least 10KΩ.
______
Page 107 of 113
Page 108 of 113
In conclusion:
Thus:
Just for the record, it can be shown that the |% Gain Error| for the non
inverting configuration is also given by (1+R1/R2)/A0
Page 109 of 113
Example 8.18
Design a non-inverting amplifier with the following spec.: closed loop
gain = 5, gain error = 1%, closed loop BW = 50 MHz. Assume the op
amp has IBIAS=0.2µA.
Determine the required open loop gain and BW of the OA.
_______
The choice of R1 and R2 depends on the driving capability (output
resistance) of the OA.
Page 110 of 113
The BW is given by:
Page 111 of 113
Example 8.19
Design an integrator for a unity gain frequency 10MHz and an input
impedance of 20KΩ.
If the OA provides a slew rate of 0.1V/ns, what is the largest peak-topeak sinusoidal swing at the input at 1MHz that produces an output free
from slewing?
______
Page 112 of 113
For a sinusoidal input Vin = Vp⋅cos ωt:
Then in order for the OA to do not slew it must be SR ≥ VP/(R1⋅C1):
Page 113 of 113