Distribution system state estimation
advertisement

229
IEEE Transactions on Power Systems, Vol. 10,No. I, February 1995
DISTRIBUTION SYSTEM STATE ESTIMATION
C. N. Lu
J. H. Teng
W.-H. E. Liu
Department of Electrical Engineering
National Sun Yat-Sen University
Kaohsiung, Taiwan, ROC
-
Abstract A three-phase distribution system state estimation
algorithm is proposed in this paper. Normal equation method is
used to compute the real-time states of distribution systems
modeled by their actual a-b-c phases. A current based formulation
is introduced and compared with other formulations.
Observability analysis for the proposed distribution system state
estimation is discussed. Test results indicate that the normal
equation method is applicable to the distribution system state
estimation and the current based rectangular form formulation is
suitable for this application.
-
Keywords State Estimation. Distribution Automation,
Distribution System Operation. Energy Management Systems
1. INTRODUCTION
In the modern Energy Management System (EMS), State
Estimation (SE) program processes a set of raw measurement
data and provides a real-time load flow solution which is the
basis of the advanced functions for system security monitoring
and control. SE is based on the mathematical relations between
the system state variables (e.g. bus voltage magnitudes and
angles) and the measurements. Various techniques have been used
to obtain an SE solution, excellent surveys on SE algorithms
can be found in [l-31. Measurements used to compute the realtime system states are bus injections, line flows and bus
voltages. In some estimators current magnitude and voltage angle
measurements are also used [4]. In addition to a real-time load
flow solution, state estimator also provides functions such as bad
measurement data detection, modeling error detection, meter
placement and observability test.
Real-time control of the distribution system reqbires an
estimate of the system stales. In the past most distribution
systems were not monitored, therefore, there was no need for SE.
Under this condition, distribution system load flow program is
often used for planning purposes, such as in computing system
losses Of different feeder configurations for system loss reduction.
Various techniques have been proposed to obtain distribution
system load flow solutions (5-131.
9 4 WM 098-4 PWRS
A paper recommended and approved
by the IEEE Power System Engineering Committee of the
IEEE Power Engineering Society for presentation at t h e
IEEE/PES 1994 Winter Meeting, New York. New York,
January 30 - February 3, 1994. Manuscript submitted
December 28, 1992; made available for printing
January 11, 1994
Pacific Gas and Electric Company
San Francisco, CA 94111, USA
Nowadays, the technology to autoinatically monitor and
control a distribution system is available [141. In an automated
distribution system, many meters are installed. Similar 10 those
in the transmission system automation, real-time measurements
are noisy, thus, techniques have to be developed to screen the
measurement data. Due to the requirements of filtering
measurement data and having real-lime system states for on-line
operation. the need for a distribution system slate estimator may
soon be justified. In this view, Wu and Neyer [IS]proposed an
asynchronous dislribution system SE technique. The SE was
formulated as a equality consuained weighted least squares
problem. A dismbution system SE that uses a minimum number
of remote measurements was presented in [ 161. An ilerative
procedure based on Kirchhoffs current law was used U, o w n the
distribution system SE.
Two types of data are required for S E they are the network
data and the measurement data. A transmission system has a
relatively balanced nature which allows the decoupling of the
three phase system and the positive sequence network is used for
the analysis. In reality. power systems are unbalanced when the
power lines are not fully uansposed andor the loads are not
balanced. The unbalanced nature of the distribution system
prohibits the use of symmevical component transformation. and
due lo various combinations of single-phase. two-phase, and
three-phase loads encountered in the distribution system. accurate
study can be accomplished only with distribution lines modeled
in their actual a-b-c phase representation I5-81.
In addition to the network dam, we also need a set of
redundant measuremenb to obtain an estimate of the system
states. In a f u l l y automated system the measurements are
sufficient for SE. However, in the current stage of distribution
system automation. the number of meters installed in the system
is low and may not be sufficient for SE, i.e. the system may not
be completely observable. In order to obtain an SE under this
condition, techniques have to be developed Lo provide additional
data (i.e. pseudo measurements) to the estimator. Intuitively. one
would use the historical dala of the feeders and distribution
transformer loadings to provide such information. Pseudo
measuremenls estimated by using historical dala may not match
exacuy the real-time actual values. but they increase the data
redundancy of SE. If Uiis approach is adopted care must be taken
in assigning weights to various types of measurements.
Techniques lhai can be used to determine lhe meter or pseudo
measurement locations for oblaining a complete observability of
the system are available in [17-211.
A three-phase SE algorithm based on normal equation
method is proposed in this paper. A new reclangular form SE
based on currenc instead of power, is introduced. The proposed
algorithm can be used U, handle many types of measuremenb. It
is applicable to the current magnitude measurements that are
often found in the distribution sysrem telemeuy. The three-phase
network models and mathematical formulation of the method are
described in this paper. The suitability of the proposed
0885-8950195/504.000 1994 IEEE
230
Bus7
Bus6
Bus8
Bus9
Bus10
15
e :Feeder Terminal Unit
:Pseudo measurement
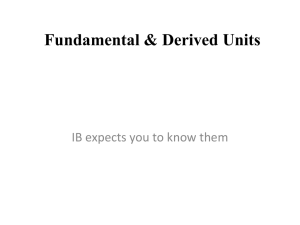
Figure 1: A Distribution System Feeder
formulation in the unbalanced system is tested by comparing it
with polar form coupled and decoupled formulations.
Observability analysis for the distribution system SE is
discussed. Effects of measurement types and redundancy on the
performance of estimation are investigated.
Va
Va
-Y ac
ac-8
Vb
Vb
2. SYSTEM MODEL AND MEASUREMENTS
Figure 1 shows a portion of a distribution system feeder in
the Taiwan Power Company (TPC) Kaohsiung District. The
three-phase primary feeder operates at 22.8 KV. The circuit is
represented on a per-phase basis. As can be seen from Figure 1,
there are three-phase and single-phase laterals involved in the
circuit. Feeder Terminal Units (FIT0 on the feeder will be used
to collect real-time data and communicate with the master
station. They also perform some control actions.
The methods developed by J. R. Carson and W. A. Lewis
[51 can be used to compute the impedances of circuits with
neutral and ground return paths. Line charging is ignored in the
study since it is relatively insignificant at distribution voltage
levels. We use the approach proposed in [5-8] to build the
admiWce matrix of the unbalanced three-phase system. Figure 2
shows the phase and neutral impedance of a three-phase feeder
section. For such a feeder section we can build a 4x4 impedance
matrix including the a-b-c phases and ground node. The
impedance matrix relates the line currents and impedances to
voltage drop of the line section. Figures 3 shows the equivalent
Circuits after the elimination of the reference (ground) node in the
impedance matrix of a three-phase feeder section. The circuit in
Figure 3 can be described by a 3x3 admittance matrix that
inc~udesthe mutual effects and relates the branch admiuances, and
node voltages to branch currents. The effects of neutral and
ground return paths are accounted for in the calculation procedure.
Zaa
Va'
Vb'
VC'
Vn
Figure 2: Impedances of a Three-phase Feeder
Section
vc
vc
-Ybc-g
Figure 3:
ycc-g
An Equivalent Circuit
Phase Feeder Section
-Ybc-g
of
a Three-
In an automated distribution system, measurements may
include bus power injections, branch power flows, bus voltages
and line currents. However. in the present stage. the distnbution
system is still rarely measured. and this results in several buses
that are unobservable, i.e. only the state of a portion of the
system can be computed. Fonunately, historical data are available
and can be utilized to forecast the loadings of feeders and
distribution transformers. These data are treated as pseudo
measurements.
Loads in a distribution system are usually classified as
three general types of customers. they are the residential.
industrial and commercial customers. Typical load pattern or
daily load curve of each type of customer can be obtained by
elecuic load synlhesis or load survey technique [5.13]. The load
composition of each distribution transformer can be calculated
according to the energy consumption of all customers served by
the transformer. B y using the load patterns and the derived load
composition. an hourly load of distribution transformer can be
estimated and used as a pseudo measurement. The quality and
quantity of information concerning loads vary among utilities. In
TPc, the energy consumption of each customer is determined by
the billing data stored in the Customer Information System (CIS)
[W.
In this study. the measurement set includes the actual
measurements on the feeders and substations (e.g. branch
currents. bus voltages and branch power flows), and the pseudo
measurements (e.g. distribution transformer loadings) obtained
from historical data. The weights assigned for the pseudo
measurements are lower than those for the actual measurements.
In this case, the SE solution tends to match the real-time
measurements and the transformer loading data can be adjusted
accordingly. This, indeed, is an important benefit of the
23 1
distribution system SE. Based on the estimated real-time system
states, the solutions obtained from many of the distribution
system advanced application software would become more
realistic.
......
....,.
15
......
::::::
3. NORMAL EQUATION METHOD
In SE,the model used to relate the measurements and the
state variables is
2 = h(X,Y) + N
W
(1)
k
2 = vector of measurements
X,Y = vectors of state variables
N = measurement noise
h = functions relating state variables to measurements
0
IO 15 20 25 30 35 40 45
Bus No.
We choose bus voltages as state variables. We can choose
to express bus voltages in polar form (X=O and Y=IVI) or in
rectangular form (X=IVkosO and Y=IVlsinB). N is assumed to be
a Gaussian distribution with zero mean and variance 02.u - is~
used to weight each individual measurement. More accurate
measurements will have lower 0 ' s . while the pseudo
measurements are assigned with higher U'S to highlight the lower
confidence given to these measurements. The noise elements are
assumed to be independent. Let R be the covariance of N, then
~ i= iai2, the variance of the i-th measurement.
Weighted Least Square (WLS) estimation computes the
state variable vectors X and Y which minimize the following
function
J(X,Y) = l12[Z-h(X,Y)lTR-1[Z-h(X,Y)]
5
(2)
J(X,Y) is minimized by differentiating it with respect to X
and Y,and setting the resulting nonlinear equation to zero. 'hen
the nonlinear equation is solved iteratively by Newton's method.
Let Hi bethe measurement Jacobian matrix at the i-th iteration,
then update of the state variables can be found by solving the
following equation
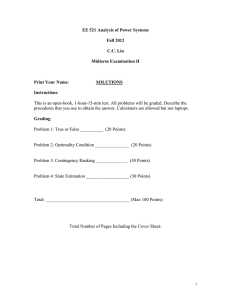
Figure 4: Jacobian Matrix Structure
0
10
0
20
30
3
40
wY
70
z
'E 50
>
1*
80
on
0
IO 20 30 40 50 60 70 80 90
Slate Variable No.
Figure 5: Gain Matrix Structure
Current Based SE Formulation
Equation (3) is called the normal equation of the W S
problem. HiTR-lHi is called the gain matrix. A solution of
[X,Y] can be obtained by solving Equation (3) iteratively until
the vector components of the right-hand side are sufficiently
small.
Readers should be reminded that since we model the feeder
on a per-phase basis, each three-phase bus will have six state
variables, with two state variables for each phase. There are
several 3x3 blocks that locate at the diagonal and off-diagonal of
the Jacobian and gain matrices.The structures of the Jacobian and
gain matrices of the 15 bus system shown in Figure 1 are given
in Figures 4 and 5. A dot in Figures 4 and 5 indicates a nonzero
enay. Figure 4 shows the nonzero terms of JNJx.
In the following, a new SE formulation based on curreni
instead of power. is proposed. The proposed formulation can
handle all types of measurements. In each iteration of SE, power
measurements are converted into their equivalent currents. In
addition, current based SE uses rectangular voltage/currenr
coordinates. It can be shown that the gain matrix derived from
nodal admiaance matrix is constant.
From Equation (3) it can be seen that the gain matrix of
SE is composed of the measurement Jacobian and the covariance
matrices. For a pair of phax-a power injection measurements Pa
and Qa, at a bus of Figure 3. they can be expressed as :
232
where Gkm + JBkm = Ykm, Gmand Bkm are 3x3 block
elements of nodal admittance matrix. Since the current injection
at phase-a of Figure 3 can be expressed in rectangular form as :
I' a = .@ s ( e a - e a . ) - b , ( f a - f , . ) + g a b ( e b - e b . )
-b
ab (f b
-fb,)+g,(ec-ec.)-b,(fc-fc.)l
lia = @ , ( f a -
fa.)+
b,(ea-
+bab(eb - e b , ) + g,(f,
ea.)+ g a b ( f b - f b , )
- fc.)+
b,k,
- ecJl
the Jacobian wms are
Therefore, if bus injection measurements are transformed
to equivalent currents. and bus voltages are expressed in
rectangular form, then the Jacobian matrix smcture of injection
measurements with respect to the state variables in a three bus
system are in the following form:
G31
- B31
I
'32
- B32
I
B31
G31
I G 3 3 - B33
I
B32
G3Z
B33
'33
Where ej. fj. Ijr and Iji are 3x1 vectors. Using the same idea, if
we converl other types of measurements, such as branch power
flows and current magnitudes, into equivalent currents and
expressed them in rectangular form then the Jacobian terns of
these measurements are constant and equal to the branch
Polar form
Rectangular form
These power measurement Jacobian terms are state dependent,
i.e., they have to be. computed in each iteration of SE.
The Jacobian terms of bus current injections with respect
to node voltages exp :ssedin rectangular form are as follows:
admittances.
With these background in hand, let's see how to find the
equivalent currents of branch power flow and bus injection
measurements. The branch power flow measurements P h m e a
and &,mea
can be converted into measurement equivalent
current I h m e a ~ by
v the following equation:
m
where v k is the estimated bus voltage at the k-th iteration.
Current flow calculaled in each iteration is
233
Observability Analysis
where y h is the admittance of the branch. Note that I h m e a W' and &d are complex values and expressed in rectangular
forms.
The conversion of bus injection measurements to tbeir
equivalent currents is the same.
= ((P+jQ)kmea / vk)*
= h(Ikmea-eqv) + j h(Ikmea*qv)
(7)
Where (P+jQ)kmea are bus injection measurements at bus k. The
bus injection calculated at each itelation is
Ikd
=
z
= Re&d)
+ J h(Ikcal)
(8)
In addition to the power measurements, other types of
measurements such as current and voltage magnitude
measurements can also be used in the rectangular formulation.
For the current and voltage magnitude measurements, due to the
lack of phase information, we use a slightly different procedure to
obtain their equivalent complex currents and voltages. The
equivalent currents and voltages are equal to the measured
magnitude values (IVklmea, IIhlmea) multiplied by the ratio of
the ca~culatedcomplex values (Vkcal = lVkCall LeV, ~ h c a=l
I I ~ LeI)
~ Ito the magnitudes of the calculated values (IVkcall,
I I ~ ~ Ii.e.,
) , let
~ h c a =l [(P+jQ)hCa' / vkcal]*
(9)
When sufficient measurements are available the state
vector of the whole system can be obtained by SE. In this case
the network is said to be observable. This is m e when the rank
of measurement Jacobian matrix is equal to the number of
unknown slate variables. The rank of the measurement Jacobian
matrix is dependent on the locations and types of available
measurements as well as on the network topology. In the threephase formulation, the rank may also be affected by the coupling
terms between phases. In certain cases, one phase may be
observable while the others are not. Thus, the relationship
between numerical observability [ZO] and topological
observability [21] is not obvious under these conditions. It Seems
not very straightfonuard to define topological observability for
three-phase SE formulation. Consequently. a numerical
observability approach m a y be preferable for the proposed threephase SE.
The numerical observability analysis based on viangular
factorization of the gain matrix can be applied to the three-phase
SE without major moditications. If any zero pivot is encountered
during the factorization of the gain malrix. it indicates that the
corresponding sme variable is not observable. In the three-phase
formulation, the zero pivot may correspond to one specific phase
of a bus. This numerical observability algorithm can be extended
to suggest additional meter placement.
4. TEST RESULTS AND DISCUSSIONS
The described distribution system SE formulation has been
tested by using three feeders in the TPC disvibution system.
Table 1 shows the peninent data of these feeders. Note tha each
bus of the feeder involves 3 single-phase pseudo measurements
and 3 single-phase line flow or current magnitude real-Lime
measurements if there is an Flll at the bus. The average rlx ratio
of the line is 1.88. The impedance and admimce matrices, given
in ohm/mile, are as follows:
then
1 b r n e - P = lIbmea I (1hCal I IIhcall)
= Re(Ihmea-W) + j h(1hmea-W')
1
(10)
ad
v k r n a q v = lvkmea I (vkcal / Ivkcall)
= Re(Vkmeaeqv) + J h(Vkmea-eqv)
2.7834 + 11.4794 0.2352 + 10.6561 0.2334 + j0.5827
0.2352+p.6561 2.7871 +jl.4761 0.2352+p.6561
0.2334 +j0.5827 0.2352 + j0.6561 2.7834 + 11.4794
0.2951 -j0.1297
-0.0597 -p.0136
-0.0538 -p.0071
(11)
By using Equations (5). (7). (9) and (IO) we can convert
power measurements and current magnitude measurements into
their equivalent currents. Based on equivalent currents the
Jacobian tern are constant and equal to the admittance matrix
elements. The equivalent currents of the measurements 1mea-W.
calculated currents IC', measurement Jacobian matrix H, and the
covariance matrix R are used to compute the right-hand side
vector of Equation (3). In addition to power and current
measurements, the voltage magnitude measurements, Equation
(11). can also be used. The first derivative of equivalent voltage
expressed in rectangular form with respect to the state variable is
unity. Based on constant Jacobian matrix H, the gain matrix
HTR-lH is constant, and it needs to be built and factorized only
once. Great improvement in the SE execution time can be
obtained by using this new scheme. Figure 7 shows the flow
diagram of the proposed three-phase SE algorithm.
-0.0597 -j0.0136 -0.0538 -p.0071
0.2956 -j0.1261 -0.0598 -10.0136
-0.0598 -j0.0136
0.2952-p.1298
Table 1: Measurement and Feeder Data
1 I 1 1 I
Feeder
No. of
No.
Buses
Length
No.of
FlU's
I
No. of
Pseudo
MeasurementS
93
48
48
~
I
No. of
Actual
Measurernents
12
18
1
234
Estlmatc pseudo measurcmcnts
at distnbuuon bansformers
&
Assign weights for pseudo
mCaSurcments
4
Use equations (5).(7).(9),(IO).( I t ) IO
convert mcaswmcnts data into
equivalent mcajurements expressed in
rectangular form
Jm
Compute and factorize the gain
matrix
nght-hand side vector of equauon (3)
+
Solve equation (3) and update (X,Y)
A,
SE formulation (method 3) has the best performance in all tests
conducted. Iteration number required by the decoupled version is
higher. Test results indicate that the decoupled formulation has
difficulty in handling current magnitude measurements. Fully
coupled formulation is more stable than the decoupled
formulation. It is also shown in Table 2 that if the measurement
set includes current magnitude measurements, all three
formulations require a higher execution time to obtain the
solution. This is due to the lack of phase information in the
current magnitude measurements.
During the testing of the proposed method, it was found
that if the current magnitude measurements that have high
weights are involved. a special procedure should be followed
when a flat s m is used. From equations (9) and (10). i t can be
seen that the equivalent complex currents obmned from a flat
start would be far away from the solution. this might result in a
convergence to an incorrect solution. To resolve this problem, a
tentative solution obtained by greally reducing the weights of
current magnitude measuements in the first and second ilerations
of SE, is found first. After that the weights of current magnitude
measurements are restored back to their original values, and the
solution procedure continues. For instance. in Table 3, for the
case of 60 bus system with current measurements, i t requires two
iterations to obtain the tentative solution and another three
iterations to get the final solution. In this case. the gain matrix
needs to be built and factonzed twice. Using this procedure. it
seems that method 3 handles current magnitude measurements
more effectively than other methods. The above mentioned
procedure is not required if no current magnitude measurement is
involved or when a previous SE solution is available.
Table 4 shows the final J(X) values of the reponed cases.
Since method 3 has converted the power measurements into the
equivalent current measurements. the equation used to calculate
the J(x) is redefned as:
Figure 7: Flow Diagram or the Proposed Algorithm
The measurement data are simulated by using a three-phase
load flow solution. Noise is added to each measurement and
weights of measurements are given. Noise is added randomly to
the actual and pseudo measurements and is at the ranges of *IO%
and f30% respectively. Two different weights are given to the
measurements, one for the actual measurementsand the other one
for the pseudo measurements. The weights are 1/3 and 1/50
respectively.
Three different methods are tested, they are :
Method 1 : Fully coupled version of normal equation method
expressed in polar form.
Method 2 : Decoupled version of normal equation method
expressed in polar form.
Method 3 :The proposed current based method.
In method 2, tbe gain matrix is approximated by a block
diagonal matrix, i. e. ignoring the off-diagonal terms to get the
decoupled gain matrices correspondingto real and reactive power,
thus, decoupling the angle and voltage components. Various tests
which use different types and numbers of measurements are
conducted. Some of them are reported here. Tests are conducted
on a SUN IPC workstation. Tables 2 and 3 show the normalized
execution time and number of iterations required in each case.NC
indicates the non-converged case. In addition to voltage
magnitude measurements, two types of actual measurements are
tested, they are the power flow measurements and iurrcnt
magnitude measurements. The execution time of method 3 with
P, Q measurements is used as a reference and normalized to 1.
It can be seen from Tables 2 and 3 that the current based
The a's used in the above cquauon are computed from a's of real
and reacuve power measurements
Table 5 shows the deviauons of the estimated solution
from the load flou solution which is used to probide the
measuremen1dam The demauon is defined as
where PkmSe is Ihe estimated branch flow and pkmload
is
the corresponding value in the load flow solution. I t should be
reminded that since measurement noise is included randomly iii
the measurements. 2 1070. and 230% respectively for actual and
pseudo measurements, thc final SE solutions will not be the
same as the load flow solution. The results shown in Table 5
indicate that even with only the pseudo measuremen& the
proposed algorithm can provide an S E solution. However, due to
the low accuracy of me pseudo measurements. the solution is bad
when we compare i t with the base case load flow solution. This
estimated solution can be improved by adding real-time
measurements to the measurement set. As can be seen from
Table 5, cases with higher number of actual measurements have
lower deviations, i.e.. they match more closely with the assumed
real-time solution. Test results have indicated that when current
magnitude measurements are involved, due to the lack of phase
information. the deviations are higher, but the percentage
differences between different methods are still small.
To verify that all three formulations have the simi!ar
solutions, using the solution obtained from method 1 as a
reference. we compute the summation of differences in branch
flows of solutions obtained from different methods. It was found
that the differences of the case of 60 bus system with only
pseudo measurements are within 1.1%. When the real-time
measurements are added. the deviations are within 0.4%. This
result indicates that the three tested methods did not converge
exactly to the same solution, but they have very similar
solutions.
With the aid of the actual measurements the proposed
distribution system SE is able to provide a load flow solution for
real-time operation. An accurate real-time update of the bus load
forecast can also be performed by using SE solution.
It can be seen from Figure 5 that the gain mamx is sparse,
thus, sparse maUix technique should be used in solving the
problem. Since individual feeder SE can be handled separately and
the problem size is generally small, the distribution system SE
can be performed on smaller machines or processed
simultaneously by different machines. The tests are also
conducted on a 486 PC and similar results have been obtained.
Table 2: Normalized Execution Time
-mcnts
p,~'
15 BUS
Plows
1.900
1.900
ancal+
1.450
1.000
4
1.450
1.050
2.150
6
2.150
6
3.100
PE
PE
PO'
2.071
1.119
1.000
5
N0.M
Actual
Metbod
measure
1
Method
2
Metbod
bU6CS
N0.M
Fmr
3.050
Execution
3
Soluliaos wtlb only p c u d o
Solutlws wilh re~l-lmmcand pseudo
mesiurernenli
Method M e l b o d M e ~ D o d M i l h o d
I
1
2
3
12.514
14 I14
13.584
%
e
%
12.514
14 I 1 4
13 SU4
e
e
e
measuremenis
Melhod
Mclbod
Number
2.224%
3
2.195%
OlFrLIS
I82S8
11126
2.1WB
2.0378
10
2
5
4
No. of
Ilcralioas
7. REFERENCES
60 Bus
Rows
2
I
IO
cumcot+
6
6
1
NI
K I
I
I
2
5
10
5
IO
5
F. F. Wu. "Power System State Estimation: A Survey,"
Electrical Power & Energy Systems, Vol. 12, No. 2,
April 1990.
M. B. Do Coutto Filho. A. M. Leite da Silva, and D. M.
Falcao, "Bibliography on power system state estimation
(1968-1989)," lEEE Trans. on Power Systems. Vol. 5,
No.3 Aug. 1990.
A. Bose, and K . Clements. "Real-Time Modeling of
Power Networks." IEEE Proceedings, pp. 1607-1622.
Dec. 1987.
K. I. Geisler, "Ampere Magnitude Line Measurements for
Power System Stare Estimation," IEEE Trans. on Power
Apparatus and Systems, Vol. PAS-103, No. 8, Aug.
1984.
D. I. H. Sun, Distribution System Loss Analysis and
Optimal planning, Ph. D. Dissertation, University of
Texas at Arlington, May 1980.
D. I. H. Sun, S. Abe, R. R. Shoults, M. S . Chen, P.
Eichenberger, D. Farris, "Calculation of Energy Losses in
a Distribution System," IEEE Trans. on Power Apparatus
and Systems, Vol. PAS-90, No. 4, pp. 1347-1356,
July/Aug 1980.
N. Vempati, R. R. Shoults. M. S . Chen, L Schwobel,
"SimplifiedFeeder Modeling for Load Flow Calculations,"
IEEE Trans. on Power Systems, Vol. PWRS-2, No. 1,
Feb. 1987, pp. 168-174.
T.-H. Chen, M.-S. Chen K.-J. Hwang, P. Kotas, and E.
A. Chebli, "Distribution System Power Flow Analysis A Rigid Approach," LEE Trans. on Power Delivery, Vol.
,NO. 3, July 1981, pp.1146-1152.
K. A. Birt, J. J . Graffy, J. D. McDonald, and A. H. ElAbiad," Three phase load flow program," IEEE Trans. on
Power Apparatus and Systems, Vol. PAS-95, No. 1,
Jan/Feb 1976, pp. 59-65.
M. E. Baran, F. F. Wu, "Network Reconfiguration in
Distribution System for Loss Reduction and Load
Balancing," IEEE Trans. on Power Delivery, Vol. 4, No.
2, pp. 1401-1407, 1989.
C. C. Liu, S. 1. Lee, K. Vu, "Loss Minimization of
Distribution Feeder: Optimality and Algorithm," IEEE
Trans. on Power Delivery, Vol. 4, No. 2, pp. 1281-1289.
1989.
H. D. Chiang. R. J. Jumeau, "Optimal Network
Reconfigurations in Distribution Systems: Pan 1: a New
Formulation and a Solution Methodology," IEEE Trans.
on Power Delivery, Vol. 5, No. 4. pp. 1902-1909, 1990.
C. S. Chen, and M. Y. Cho, "Determination of Critical
Switches in Distribution System,'' IEEE Trans. on Power
Delivery, Vol. 7, No. 3, July 1992. pp. 143-1449,
"Distribution Automation: A practical tool for shspinp a
more profitable future," Special Report, Electrical World,
Dec. 1986, pp. 43-50.
F. F. Wu and A. F. Neyer, "Asynchronous Distributed
State Estimation for Power Distribution Systems."
Proceeding of 10th Power Systems Computation
Conference, Aug. 1990.
I. Roytelman, and S. M. Shahidehpour, "State Estimation
for Electric Power Distribution Systems in Quasi RealTime Conditions," EEE paper 93 WM 090-1 PWRD.
F. Mafaakher, A. Brameller, J. F. Bermudez, "Optimum
metering design using fast decoupled state estimator,"
IEEE Trans. on Power Apparatus and Systems, Vol. PAS98, Jan. 1979, pp. 62-68.
K. A. Clement, G. R. Krumpholz, P. W. Davis, "Power
system slate estimation with measurement deficiency: an
observability measurement placement algorithm," IEEE
Trans. on Power Apparatus and Systems, Vol. PAS-102,
July, 1983, pp. 2012-2020.
M. K. Celik, and W.-H. E. Liu, "A Meter Placement
Algorithm for the Enhancement of State Estimation
Function in an Energy Management System," Paper
prepared for the Third International Symposium on
Electricity Distribution and Energy Management, 1993.
A. Monticelli and F. F. Wu, "Network Observability:
Identification of Observable Islands and Measurement
Placement," IEEE Trans. on Power Apparatus and
Systems, Vol. PAS-104, May 1985, pp. 1035-1041.
K. A. Clement, G. R. Krumpholz, and P. W. Davis,
"State Estimator Measurement System Reliability
Evaluation - An Efficient Algorithm Based on Topological
Observability Theory," IEEE Trans. on Power Apparatus
and Systems, April 1982, pp. 997-1004.
Chan-Nan Lu received B.S. degree from National Taiwan
University, M.S. degree from Rensselaer Polytechnic Institute,
and Ph. D. degree from Purdue University. He has held positions
at General Electric Co. Pittsfield. Mass., and Harris Corp.
Controls and Composition Division, Melbourne, FI.. Currently.
he is with Department of Electrical Engineering. National Sun
Yat-Sen University, Kaohsiung, Taiwan. He is a senior member
of IEEE.
J. H. Teng received his BS and MS degrees froin National Sun
Yat-Sen University in 1991 and 1993. Currently, he is pursuing
his PH. D degree in the same University.
W.-H. Edwin I.iu received the B.S. degree from National
Taiwan University in 1981, the M.S. degree in 1984 and Ph.D.
degree in 1987 bo& from the University of California Berkeley,
in Electrical Engineering and Computer Sciences. He was a
research assistant at U. C. Berkeley from 1983 to 1987 and
worked for Bonneville Power Administration during the Summer
of 1986. From September 1987 to June 1991, he worked for
Empros Systems International as a Senior Engineer in the
Network Applica*ion group and developed solfware for power
system computer applications. Since J u l y 1991, he has been
with the Applications and Systems Integration Department of
PG&E where he is respondible for several research and
development projecls in both analytical melhodology and
computer applicauons. Dr. Liu also leaches graduate courses in
the Engineering Division of San Francisco S w e University.
237
DISCUSSION
Siemens Energy Br Automation, Plymouth,
SLUTSKER,
Minnesota. W.F. TINNEY. Consultant, podand, Oregon: The authors
are congratulated on the development of a new method of Slate
estimation for distribution svstems. we would like to s o k i t
In the authors' method. power flow measurements are translated
into equivalent current values that are then used in the state
estimator solution. While it is easy to convert power measurements
into currents. it is much less clear how to compute weights of current
measurements to ensure that the solutions of the original and
derived problems are identical.
It can be shown that, if real and reactive power measurements
have different weights, the error terms in real and imaginary
components of the derived currents are distributed normally with
variances which are functions of voltage components used in current
computation.
This means that weights of current measurements,
which must be computed as inverses of variances to guarantee the
equivalence between the original and derived formulation. will
fluctuate between iterations and the gain matrix will no longer be
constant.. The need to recompute and refactorize the gain matrix in
each iteration will make the proposed method no more advantageous
than the fully coupled formulation. Of course, the gain matrix can be
held constant at some value of current measurement weights, and
this will produce a solution but it won't be the solution of the original
problem.
It appears that the authors used measurements with equal
weights of real and reactive components in their tests.
This,
however, will not be true in many practical situations. How do the
authors intend to deal with cases bf unequal weights of real and
reactive measurements?
Can the authors explain their approach to
the calculation of weights of the derived currents?
Again, the authors are commended on a new method of solving a
state estimation problem.
Their answers to our questions will be
awaited with great interest.
Manuscnpl received February 17, 1994
of the transmission systems weighted least square state estimator
method to distribution systems. Distribution systems control and
operation have fundarnedtal differences with t h k e of transmission
systems which make it diffcult to apply the transmission Systems state
estimation techniques directly to distrihution systems. The differences
include unbalanced conditions, current magnitude measurements and
the applications of historical (statistical) load data as pseudo
measurements. The authors have proposed reasonable ideas and
proved by test results that the p r o p i d ideas work. We have a few
questions and comments regarding the practical implementation of the
proposed method and presented results.
1. Modeling of unbalanced distribution systems:
The authors have based their algorithm on three wire presentation of
four wire systems. The elimination of neutral wire may he. done
according to [a], using one of the following two methods. the first one,
refereed to as the Kron reduction method, makes an assumption that
the ground wire is at zero potential at both ends of a branch (feeder
section), or,
zi,* znj I ,z
The second method, refereed to as the neutral return reduction
method, makes the assumption that the return current follows the
path through the neutral and all loads are grounded, or,
muation
These
have Opposite impacts On the
(1) decreases self impedances slightly and decreases mutual
imoedances simificantlv. Euuation 121 increases both series and
m;tual impedances. Hdwevir, some bi the simplifying assumptions
may not work for practical Cases. Neutral wire may not always
represent zero potential, and there are delta connected loads in every
distribution feeder. In general, unbalanced 4-wire distribution systems
should be simulated as 4 wires without elimination of neutral wire
using a 4x4 matrix
2. Branch current magnitude measurements:
Wayne Hong Opercon Systems, Inc
:
The authors are to be commended for their interesting development of DSE. This
paper presented a thorough mathematical framework and described some potential
applications, including those for real-time operation. I would appreciate if the
authors can comment on the following:
I ) A separate paper [AI in the '94 Winter Meeting also described DSE. How do
these two paper differ in their approaches and applications?
2 ) In most distribution systems, there are never enough real-time measurements. As
such, the networks are in general not observable. You have suggested to use
historical data as pseudo measurements. Could you quantify the relationship
between mors in the historical data and those in the resulted system states obtained
from DSE?
3) According to your paper, a DSE with added real-time readings can provide a
better estimate of the state of dishibution system operation. How does DSE then fit
into the overall goal of Distribution Automation?
[AI M.E.Baraa A.W. Kelley, "State Estimation for real-time Monitoring of
Disnibution Systems". 94 W M 235-2 PWRS
The problem with current magnitude measurement is that the only
way we can obtain current angle is to use preliminary power flow
results based on load pseudo measurements. Our experience with this
method indicates that the weight coefficients for current magnetite
and angle should be different as magnitude is directly measured and
is more reliable, however, angle is estimated using historical data.
Another problem with weights for current magnitude is that they are
less than weights for active and reactive power measurements in
distribution substations, as the corresponding power is determined by
state estimation in transmission systems.
3. Weights for pseudo measurements:
The authors use different weights for real and pseudo measurements.
But for different type pseudo measurements different values of
weights are to he used. Another observation is that loads (pseudo
measurements) power factor is more reliable than active power or
current magnitude. The power factor is used as a measure of results
(loads) feasibility and should be kept within its permissible range [b].
Manuscnpl received FCbruary 24, 1994
4. Proposed simplifications:
I. Roytelman (SiemensEmprus) and S.M. Shahidehpour (Illinois
Institute of Technology)-- The topic of this paper is extremely
important from the standpoint of future development of distribution
management systems. The authors have proposed the implementation
The authors assume that the phase angles of voltages are less than 10
degrees. Our experience with distribution systems indicates that this
assumption is correct only for the primary voltage level and in cable
systems. Since loads are connected to the secondary voltage level,
distribution transformers voltage drop should be. taken into account.
In heavily loaded overhead lines, line voltage drop gives additional
angle shift. These assumptions may provide a more simple model for
238
distribution systems, however, the simulation results may turn out to
be different from actual practice.
Let
5. Test results:
Test results are presented for relatively small systems. To our
knowledge, it is better to apply state estimation to portions which are
supplied from distribution substation transformers rather than feeders.
The reason is that p e r flows are measured at substation
transformers and current magnitudes are measured at corresponding
feeders. O n the average, one feeder supplies 150-200distribution
transformers and the number of feeders connected to one substation
transformer is 7-10. So the average size of a portion entails to
1500-2000transformers. If we consider unbalanced conditions as well,
the state estimation problem will be a complicated problem for
distribution systems and it would be interesting to see the results of
the proposed techniques on more practical cases.
The authors should be congratulated for a well-written paper on
distribution systems.
[a] IEEE Tutorial on Power Distribution Planning, 92 E H 0 361-6PWR.
p] I. Roytelman and S.M. Shahidehpour, "Practical Aspects of
Distribution Automation in Normal and Emergency Conditions," IEEE
Trans. on Power Delivery, Vol. 8, No. 4,pp. 2002-2008,October 1993
Manuscript receivrd March 4, 1994.
C. N. Lu, J. H. Teng and W. H. E. Liu : W e wish
to thank the discussants for their interest in our paper
and thoughtful comments. In the following, we will
respond to each of the discussants' comments.
Messrs Slutsker and Tinney
In order to obtain a constant Jacobian matrix and to
incorporate current measurements in the formulation,
all measurements are converted into equivalent current
measurements. The advantage of the formulation has
been clearly shown in the test results of the paper.
The conversion process is explained in further detail in
the following. As we have stated in the paper, at each
iteration, the equivalent current measurements are
calculated based on the active and reactive power
measurements and the solved voltages from the
previous iteration.
Assuming that the complex voltages used in the
conversion are deterministic and the active and
reactive power measurements are statistically
independent, then, the variances of the converted
complex currents can be derived as follow:
Var(Re(Iimea-eqv)) = Var(aPimea+bQjmea)
= a2Var(Pimea)
+ b2Var(Qimea)
('44)
Var(Im(Iimea-eqv)) = Var(bPimea-aQimea)
= b2Var(Pimea)
+ a2Var(Qimea)
(A3
In the case where Var(P) = Var(Q), the equations can
be simplified as
Var (Re(Iimea-eqv)) = Var(Pi)Ni2 = Var(Pi)
(A6)
VW (Im(Iimea-eqv)) = Vw(Qi)Ni2 = Var(Qi)
(A7)
In our implementation, by using a distribution system
load flow or a previous state estimation solution, an
initial set of e and f is obtained. This set of e and f is
then used to compute the variances of equivalent
measurements and form the gain matrix. The gain
matrix is kept constant while the right hand side of
equation (3) in the paper are computed by the solution
from the previous iteration including the weights. Note
that the weights for the measurements are set to be
equal to the inverse of the variances.
Strictly speaking, the voltages used in the calculation of
the right-hand-side vector of equation (3) do carry
certain randomness through the iterative process.
However such randomness is neglected in the
traditional WLS state estimation. The variance of each
component of the vector [z-h(xi,yi)] is assumed to be
equal to the variance of the corresponding component
of z, i.e. Var(Zk-hk(Xi,Yi))'Va(Zk). This is based on the
assumption that xi and yi from the previous iteration are
deterministic, and hence h(xi,yi) is deterministic. Such
assumption has been widely accepted in practical
implementation. Similarly, in our derivation of equivalent
measurement variances, the voltages are considered as
deterministic. Statistically, with the approximated
variances, the estimator is still an unbiased estimator.
Practically, we think, it is not necessary to get into
detailed derivation for the randomness in the nonlinear
239
iterative process. Based on our experience, slight
approximation in the variances (i.e. weights) does not
affect the estimation solutions too much. In order to
validate the approximation, a 15-bus system example is
tested under various conditions, and results are shown
in the following Table.
~~~~
~~
~~~
~
Method 1
-Weights
-15.7151
P5a,mea-
p=2
Q=2
est
P~~
Q5a
p5= mea--3.10072
P=20
Q.20
P5aest
QSa
P.200
Q=20
est
est
Psa est
Q5a
est
Method 3
14.20619
P5aest
2.45973
Q5= est = 2.47091
=
14.70647
PSaest - 14.7011
=
2.67225
Qsaest
=
15.48135
P5aest =15.47671
=
2.67230
Q5aest =2.68651
~
=
=
14.2041
~
=
2.68437
mea: measurement
est: estimated value
Methods 1 and 3 correspond to the fully coupled polar
form method which uses the original measurements
and weights, and the proposed current based method,
respectively. Method 3 uses the above mentioned
method to determine the weights of equivalent
measurements. As can be seen from the Table, for
both methods, when the original weights are increased
(variances are decreased) the estimated injections
match the measurements more closely, and their
results are very similar. Resembling results are
observed at different phases and nodes of the feeder.
These results indicate that the measurement and
weight conversion is properly handled by the proposed
method.
Mr. Wayne Hong
1. Both [A] and our paper use weighted least square
technique and a three-phase model to estimate the
distribution system states. The major difference
between these two papers is in the approach used to
obtain the constant gain matrix. In [A], some
approximations and transformation are used to simplify
the Jacobian matrix while in our method, constant
Jacobian matrix is obtained by converting power
measurements into equivalent currents and expressing
bus voltages in rectangular form. Both methods are
designed to provide an estimate of the real-time system
states for distribution system operation.
2. Due to the cost of measurement and communication
equipments, real-time load data of each node in the
feeder are not available at the present time. Load data
are often obtained based on historical data collected by
utilities. Since these data are used in the estimation
process, thus, the accuracy of load data affects the
estimation of the real-time system states. Based on
some assumptions on the measurements and load data,
Table 5 provides some quantitative results of the errors
existing in the historical load data and the estimated
results.
3. State estimation can provide a good estimate of the
system states that can then be used by many
distribution automation applications, such as feeder
reconfiguration, v o l t a g e h a r control, etc.. T h e
usefulness of these applications requires a reasonable
accurate estimate of the system states. As can be seen
in the paper, the quality of the forecasted load data are
improved by the distribution state estimation using
available real-time measurements. The state estimation
can be used to check the validity of the forecasted load
and to make necessary corrections. Hence, the system
states provided by state estimation is better than what
is available from an off-line power flow study.
Furthermore, if more real-time measurements become
available in some key locations and the distribution
network becomes observable, the system states can be
estimated directly from the real-time data. This can
highly improve the solutions of all network applications.
A fully automated distribution system may become
feasible.
Drs Roytelman and Shahidehpour
1. We agree that different model should be used if the
line under study does not have a multi-grounded neutral
which is the basic assumption of the Kron reduction
method adopted in this paper.
2. In our method the current magnitude measurements
are treated as regular measurements except for the
special treatment in a flat start case. The estimated
phase angles of the corresponding branch currents are
obtained at each iteration of the estimation process. W e
did not use current phase angle measurements in the
estimation.
3. U n d e r
t h e c i r c u m s t a n c e s that r e a l - t i m e
measurements are not sufficient for a state estimation,
any available historical data related to the feeder
loading should be used as pseudo measurements.
Certainly, due to different confidence on various
histoiical data, different weights are given to different
types of data. Since weight disparity has beeil identified
as one of the factors that could cause numerical
problems in state estimation. The effects of weight
assignment should be carefully investigated. In this
paper, we do not explicitly address the issue of weight
assignment. The purpose of the paper is to present an
effective formulation to solve distribution system state
estimation. Further research and development in many
important subjects in this area, such as meter
placement, observability analysis, bad data processing,
weights selection, etc., are certainly welcome.
4. In this paper we did not assume that the phase
angles of voltages are less than 10 degrees.
5. To be useful in the feeder automation, we tested the
proposed method on individual feeder. Since data
240
accuracy and sufficiency of different feeders may be
different, the strategy used in this paper is to estimate
the states of all feeders sequentially one after another.
Therefore, the test system size is relatively small. If
sufficient data are available then a complete state
estimation covering all feeders simultaneously can be
performed.
Once again the authors would like to thank all the
discussants for their comments and contributions.
Manuscript received April 29, 1994