s ligand mot or
advertisement

ligand
FAST
mot
or
+ATT
-ATT
+CH 3
MCPs
SLOW
W
P
-CH 3
B
ATP
ATP
Pi
rpoH gene
Transcription
s
Feedback
-
Heat
-
mRNA
Translation
s 32
hsp1
Feedback
32
Feedforward
Heat stabilizes
hsp2
Transcription & Translation
FtsH
Lon
DnaK
GroL
GroS
Proteases
Chaperones
s 32
Heat
MCPs
B
A
CW
W
P
Y
~
A
flagellar
motor
R
P
Z
ADP
Y
Pi
Collaborators and contributors
(partial list)
Theory: Parrilo, Carlson, Paganini, Papachristodoulo, Prajna,
Goncalves, Fazel, Lall, D’Andrea, Jadbabaie, many current
and former students, …
Web/Internet: Low, Willinger, Vinnicombe,Kelly, Zhu,Yu, Wang,
Chandy, Effros, …
Biology: Csete,Yi, Arkin, Simon, AfCS, Borisuk, Bolouri, Kitano,
Kurata, Khammash, El-Samad, Gross, Endelman, Sauro,
Hucka, Finney, …
Physics: Mabuchi, Doherty, Barahona, Reynolds,
Asimakapoulos,…
Turbulence: Bamieh, Dahleh, Bobba, Gharib, Marsden, …
Engineering CAD: Ortiz, Murray, Schroder, Burdick, …
Disturbance ecology: Moritz, Carlson, Robert, …
Caltech faculty
Other Caltech
Finance: Martinez, Primbs, Yamada, Giannelli,…
Other
For more details
www.cds.caltech.edu/~doyle
www.aut.ee.ethz.ch/~parrilo
And thanks to Carla Gomes for
helpful discussions.
Subthemes of this program
• Scalability of algorithms and protocols
– Large network and physical problems
– Decentralized, asynchronous, multiscale
– Computational complexity: P/NP/coNP
• Approaches
– Duality
– Randomness
• Workshop II part of this program
• Workshop last week on “Phase Transitions of
Algorithmic Complexity”
The Internet hourglass
Applications
Web
FTP
Mail
News
Video
Audio
ping
napster
Transport protocols
TCP SCTP UDP
ICMP
IP
Ethernet 802.11
Power lines ATM
Optical
Link technologies
Satellite Bluetooth
The Internet hourglass
Applications
Web
FTP
Mail
TCP
News
Video
Audio
ping
napster
Everything
Transport protocols
on IP
SCTP
UDP
ICMP
IP
Ethernet 802.11
IP on
Power lines ATM Optical
everything
Satellite Bluetooth
Link technologies
From Hari Balakrishnan
Towards a theory of the Internet
• The well-known original design principles are a
rudimentary “theory of the Internet.”
• This is a nearly pure robustness theory (little else is being
optimized).
• Can we provide a “deep,” complete, and coherent theory
of internetworking? (Like standard comms and controls.)
• If we can’t say something systematic about the Internet
protocols, we’re probably kidding ourselves about our
ability to treat more complex problems.
• Nevertheless this is just a “warm-up” for a theory of
ubiquitous embedded software, protocols, and networks
for real-time control of everything, everywhere.
Network protocols.
HTTP
Files
TCP
IP
packets
packets
packets
packets
packets
packets
Routing
Provisioning
Network protocols.
Vertical decomposition
Protocol Stack
HTTP
TCP
IP
Routing
Provisioning
Network protocols.
HTTP
TCP
IP
Horizontal decomposition
Each level is decentralized and asynchronous
Routing
Provisioning
Vertical decomposition
• “Breaks” standard communications
HTTP
and control theories.
• Coherent, complete theory is missing
but possible. First cut nearly done.
TCP
• In what sense, if any, is this optimal?
IP• What needs to be done to fix it?
Horizontal decomposition
Routing
Provisioning
Key elements of new theory
• Primal/dual vertical and horizontal decomposition
(Kelly et al, Low et al)
• Source coding into mice and elephants. (Appears to be
“universal” but needs more study.)
• Congestion control for bandwidth utilization and minimal
delay. Proofs use relaxations (but still handcrafted).
• How bad is short path (low delay for mice) routing for
elephants in a “well-provisioned” network? Conjecture:
Not bad.
• Vertical and horizontal integration can be made “nearly”
optimal in an asymptotic sense. (In what sense?)
• Lots of people here are working out details (the IPAM
team!). Stay tuned.
Vertical decomposition
• Networking protocols
• Multiscale physics
• Biological networks
• Business, finance, econ organization
• Unifying theoretical framework?
Horizontal decomposition
What’s next?
• Scalable, integrated robustness analysis and
software/protocol verification for hybrid control of
nonlinear systems.
• New extensions to robust control using sum-of-squares
and semidefinite programming (SOS/SDP) offers
extraordinary promise.
• Already demonstrated on wide array of complex problems
(controls, maxcut, quantum entanglement).
• Potentially deep connections between verification and
robustness.
• Huge implications for biology and physics.
• That’s the good news.
Compute
Communications and computing
Compute
Act
Sense
Environment
Computation
Devices
Devices
Control
Dynamical Systems
From
• Software to/from human
• Human in the loop
Compute
To
• Software to Software
• Full automation
• Integrated control,
comms, computing
• Closer to physical
substrate
Computation
• New capabilities & robustness
• New fragilities & vulnerabilities
Devices
Devices
Control
Dynamical Systems
Good new, bad news, good news
• Good: Powerful new capabilities enabled by “embedded,
everywhere”
• Bad: Frightening new potentials for massive cascading
failure events
• Good: Need for new math tools for verifying robustness
of embedded networking.
– Embedded: Ubiquitous, sensing, actuating
– Networking: Connected, distributed, asynchronous
• This represents an enormous
change, the impact of which
is not fully appreciated
• Robustness and verifiability
of highly autonomous control
systems with embedded
software is the central
challenge
• Until recently, there were no
promising methods for
addressing this full problem
• Even very special cases have
had limited theoretical
support for systematic
verification of robustness
• Everything has changed!
Computation
Compute
• New capabilities & robustness Devices
• New fragilities & vulnerabilities
Devices
Control
Dynamical Systems
Vertical decomposition
• “Breaks” standard communications and
HTTP
control theories.
• Duality as a method for decomposition
TCP
• Distributed
and asynchronous control
• Other applications
IP
• Robustness
analysis
• A posteriori error bounds for PDEs
Horizontal decomposition
Routing
Provisioning
Robust hybrid/nonlinear systems theory
of embedded networks?
“Theory”
without
scalable
algorithms.
Linear theory
plus bounds,
with scalable
algorithms.
Hacking. (Scalable
algorithms without
theory.)
Theory with
scalable
algorithms?
Most research: Not scalable, no theory.
Provably robust,
scalable protocols for
control over
embedded networks.
Robustness verification
of embedded control
software/hardware.
Theory with
scalable
algorithms.
Provably robust,
scalable Internet
protocols.
Hacking.
Key issues
1. Robustness/Fragility: Uncertainty in
components, environment, and modeling,
assumptions, and computational
approximations
2. Verifiability: Short proofs of robustness
3. Complexity: Extreme, highly structured
internal complexity is typically needed to
produce verifiably robust behavior
4. Scarce resources: All tradeoffs are aggravated
by efficiency and scarce resources
Ideal
performance
Typical
design
IP
Robustness,
evolvability/scalability,
verifiability
Robustness
Evolvability
Verifiability
• Relative to“nominal” performance under ideal
conditions, robust performance typically requires
– greater internal complexity
– some loss of nominal performance
• Tradeoffs between robustness, evolvability, and
verifiability seem less severe (e.g. IP)
Robustness,
evolvability/scalability,
verifiability
Ideal
performance
Robustness
Evolvability
Verifiability
• That a system is not merely robust, but verifiably so, is
an important engineering requirement and major
research challenge
• There is much anecdotal evidence and some new
theoretical support as well for the compatibility of
robustness, evolvability, and verifiability
• Verifiability in forward engineering translates into
comprehensibility in reverse engineering of biological
systems
• This research direction may be good news for
understanding complex biological processes
Computational complexity
Assume you already know:
• P/NP and NP complete
• SAT and 3-SAT
…but not necessarily
• NP vs coNP
• Duality and relaxations
x R F ( x) ?
n
Typically NP hard.
• If true, there is always a short proof.
• Which may be hard to find.
x R F ( x) ?
n
Typically coNP hard.
Fundamental asymmetries*
• Between P and NP
• Between NP and coNP
• More important problem.
• Short proofs may not exist.
* Unless they’re the same…
x R F ( x) ?
n
What makes a
problem “harder”?
x R F ( x) ?
n
Easy to find solutions?
x R F ( x) ?
n
S1
Satisfiable or feasible
Easy to find proofs?
x R F ( x) ?
n
Unsatisfiable or infeasible
0
1
k
k+1
Trivially sharp "phase transition" at
max F ( x)
x
Complexity?
Example: Satisfiability
• SAT: Given a formula in propositional calculus, is
there an assignment to its variables making it true?
• We consider clausal form, e.g.:
• (a OR (NOT b) OR c) AND (b OR d) AND (b OR
(NOT d) OR a)
• a, b, c, and d are Boolean (True/False) variables.
• Problem is NP-Complete. (Cook 1971)
• Shows surprising “power” of SAT for encoding
computational problems.
Generating Hard Random Formulas
• Key: Use fixed-clause-length model.
– (Mitchell, Selman, and Levesque 1992)
• Critical parameter: ratio of the number of clauses
to the number of variables.
• Hardest 3SAT problems at ratio = 4.3
Hardness of 3SAT
4000
50 var
40 var
20 var
3000
DP Calls
Hard
2000
1000
0
Easy
Easy
2
3
4
5
6
7
Ratio of Clauses-to-Variables
8
1.0
• At low ratios:
50% sat
0.8
– few clauses
(constraints)
– many assignments
– easily found
0.6
0.4
0.2
0.0
2
3
4
5
6
7
Ratio of Clauses-to-Variables
Mitchell, Selman, and Levesque 1991
4000
3000
50 var
40 var
20 var
8
• At high ratios:
– many clauses
– inconsistencies
easily detected
2000
1000
0
The 4.3
Point
1.0
• Refer to as a
50% sat
0.8
– SAT transition
– Complexity transition
0.6
0.4
0.2
0.0
2
3
4
5
6
7
Ratio of Clauses-to-Variables
Mitchell, Selman, and Levesque 1991
4000
3000
2000
1000
0
50 var
40 var
20 var
8
• Is SAT transition
either necessary or
sufficient for
complexity transition?
• Connections with
phase transitions in
statistical physics?
• Are transitions “sharp”
in large size limit?
Theoretical Status Of Threshold
• Very challenging problem ...
• Current status:
– 3SAT threshold lies between 3.45 and 4.6
(Motwani et al. 1994, Achlioptas et al. 2001,
Kirousis 2002, Broder and Suen 1993, Dubois
2000; Achlioptas and Beame 2001, Friedgut 1997,
etc.)
• Other problems better characterized (NPP)
SAT Phase transitions
?
?
Complexity
Quasigroups or Latin Squares
Quasigroup or
Latin Square
(Order 4)
32% preassignment
Gomes and Selman 96
A quasigroup is an n-by-n
matrix such that each row and
column is a permutation of the
same n colors
Quasigroup with Holes (QWH)
• Given a full quasigroup, “punch” holes into it
32% holes
• Always completable (satisfiable), so no SAT transition.
• Appears to have a complexity transition (easy-hard-easy).
SAT Phase transitions
?
?
Complexity
Lots of problems with statistical physics story.
Why may it be reasonable that
math, algorithms, and randomness
are so effective?
• Robust systems are verifiably so?
• Do only robust systems persist as coherent,
structured objects of study (universes, solar
systems, planets, life forms, protocols, …)?
• If so, then mostly robust (and verifiably so)
systems are around for us to study.
Lattice models?
What can we do with lattices that will
be easy to understand, yet relevant to
the “real” computational complexity
problems that we most care about?
Key abstractions:
1. Robustness/Fragility
2. Verifiability
3. Complexity
.2
.4
.6
.8
Density = fraction of occupied sites (black)
Not connected
Connected
Focus on “horizontal” paths.
“Vertical” paths in empty sites
are allowed to connect through
corners or edges. (8 neighbors)
“Horizontal” paths connect only
on edges. (4 neighbors.Ordinary
square site percolation.)
Focus on
“horizontal” paths.
Some (nonstandard) definitions
vertical paths horizontal paths
Critical phase transition at density = .59…
.2
.4
.6
.8
Density = fraction of occupied sites (black)
Not connected
Connected
Focus on “horizontal” paths.
• Robustness is provided by barriers in some state
space. These prevent cascading failure events.
• Lattices offer a crude abstraction, in that paths can be
thought of as barriers, with robustness to perturbations
in the lattice.
• Verifiability complexity is
measured in the length of the
proof required to verify
robustness.
• Lattices can offer a variety of
crude abstractions to this as well.
The length of minimal paths
would be a simple measure of
“proof length.”
Very special features:
• Dual and primal problems
are “essentially” the same.
• There is no duality gap.
vertical paths horizontal paths
vertical paths horizontal paths
Caution: potential source of confusion.
Barriers in 3d
lattices are 2d
cuts.
Barriers in 1d lattices
are 0d cuts.
path
fragments
barrier
In general, barriers are d-1
dimensional (dual) cuts
stopping 1-dim (primal)
paths in a d-dim lattice.
vertical paths horizontal paths
Critical phase transition at density = .59…
Lattices offer pedagogically useful but potentially
dangerously misleading simplifications, which are thus
both strengths and weaknesses:
1. Internal complexity
2. Computational complexity
3. Duality
Focus on
“horizontal” paths.
1. Internal vs external complexity: Real biology and
technology uses extremely complex hierarchical
organization in order to create robust and verifiably
(simple) behavior. Lattices allow no distinction
between complex organization and complex behavior.
This can be very misleading.
2. Computational complexity: Most lattice computational
problems are in P and thus easily explored, but fail to
illustrate the P/NP asymmetry. We will rely on notions
of complexity that are good analogies, but not precisely
comparable.
3. Duality: Duality is greatly simplified and transparent.
This makes exposition easy but hides the NP/coNP
asymmetry which is central to the general problem.
Lattices offer enormous (and potentially dangerous)
simplifications:
• Robustness problem= existence of horizontal path
• Verification = prove existence of horizontal path
• Complexity = minimum horizontal path length (of proof)
• Model fragility = minimum number of site changes to
break all horizontal paths (= create a vertical path)
Focus on
“horizontal” paths.
Note: I’m going to draw small lattices
and rely on your imagination for what
large lattices would look like.
Alternative definition of “complexity:”
• The “computer” is you, looking at the lattice and
determining by inspection whether there is a path or not.
• This can be easy or hard, depending on the density.
• This is not exactly the same as minimal path length, but
close enough for now.
• Do a very informal story, and then make it rigorous.
.2
.4
.6
Density = fraction of occupied sites (black)
.8
No
Yes
Easy
Exist
horizontal
path?
Hard
For random lattices, there are 4 regimes, with all combinations
of Easy/Hard and Yes/No. The hard cases correspond to lattices
that are of intermediate density, near the critical point. Easy
cases are either high or low densities, which always correspond
to Yes or No, respectively.
No
Yes
No
Easy
Easy
Hard
Hard
Yes
It is much easier to see with all the clusters colored. But
that’s cheating, because determining the clusters is
essentially the computational problem.
No
Easy
Hard
Yes
The
orthodox
story:
Hard problems
are associated in
some way with
the phase
transition.
Low/Yes
High/No
The counterexamples
Easy &
Robust
Exactly the opposite
of criticality
Hard &
Fragile
No
• Yes or no
• Easy or hard
• High or low density
• Robust or fragile (to
perturbations)
Easy
Hard
Yes
Low/Yes
Easy &
Robust
High/No
The counterexamples
Exactly the opposite
of criticality
Hard &
Fragile
1.
2.
3.
4.
Yes or no
Easy or hard
Low or high density
Robust or fragile (to
perturbations)
16 different
possible combinations
Low/Yes
Easy &
Robust
High/No
The counterexamples
Exactly the opposite
of criticality
Hard &
Fragile
1.
2.
3.
4.
Yes or no
Easy or hard
Low or high density
Robust or fragile (to
perturbations)
8
16 different
possible combinations
Robust
Fragile
Robust
Easy
Easy
Hard
Hard
Low Density
(but connected)
Fragile
High density
Hard implies fragile (we’ll prove this later). So
only 6 of the 8 possibilities exist, and the critical
density is nothing special. We will prove that
these and only these implications hold.
Robust
Fragile
Robust
Easy
Easy
Hard
Hard
Low Density
Robust Fragile
Fragile
High density
Robust Fragile
Easy
Easy
Hard
Hard
Robust
Fragile
Easy
Hard
All interesting real world
problems are in this
regime, with efficient,
highly structured, rare
configurations, using
scarce (limited) resources.
Low Density
Robust
Fragile
Air bags
EGR control
Electronic fuel injection
Electronic ignition
Electric power
steering (PAS)
Easy
Hard
Temperature control
Anti-lock brakes
Active
suspension
Electronic transmission
Cruise control
Robust
Fragile
Easy
Hard
Impossible.
Low Density
Robust
Easy
Hard
Fragile
Improbable
in random
lattices.
Robust
Fragile
Robust
Easy
Easy
Hard
Hard
Low Density
Fragile
High density
Theorem:
Fragility Complexity Scarcity
Proof tonite.
Theorem:
Fragility Complexity Scarcity
Random lattices are complex (and
fragile) only at critical phase transition.
Low Density
Robust Fragile
High density
Robust Fragile
Easy
Easy
Hard
Hard
Definitions. Assume there is a connected
(horizontal) path of minimal length l .
n = length of side
r = density
l = MinPath length
Occupied
Empty
MinPath
Typical “minimal” path
Definitions. Assume there is a connected path of
minimal length l .
n = length of side
r = density
l = MinPath length
b = MinCut barrier length
Typical “minimal” cut
Occupied
Empty
MinPath
Typical “minimal” path
b
Definitions. Assume there is a connected path of
minimal length l .
n = length of side
r = density
l = MinPath length
b = MinCut barrier length
Vertical path
b
n = length of side
r = density
l = MinPath length
b = MinCut barrier length
Assume a path exists.
(Otherwise L=F=.)
Necessarily r 1/n, n2 l n
and define
S
L
F
log r Resource scarcity 0 S log(n)
l
log = Path Length Complexity 0 L log(n)
n
n
log = Path Fragility 0 F log(n)
b
l = MinPath length
b = MinCut barrier length
S
L
F
log r Resource scarcity 0 S log(n)
l
log = Path Length Complexity 0 L log(n)
n
n
log = Path Fragility 0 F log(n)
b
Theorem: F L S
Fragility Complexity Scarcity
l = MinPath length
b = MinCut barrier length
S
L
F
log r Resource scarcity 0 S log(n)
l
log = Path Length Complexity 0 L log(n)
n
n
log = Path Fragility 0 F log(n)
b
Theorem: F L S
Proof (Vinnicombe&sushi): To provide robustness to b
changes, there must be at least b independent paths, which by
assumption have minimum length l. Necessarily r n2 lb, or
r n/b l/n. Take log of both sides.
S
L
F
log r Resource scarcity 0 S log(n)
l
log = Path Length Complexity 0 L log( n)
n
n
log = Path Fragility 0 F log(n)
b
Theorem: F L S
This is “maximally tight” in the sense that:
Lattices and paths can be:
1. Resources: Scarce or rich
2. Existence of path: Yes or no
3. Complexity: Hard or easy
4. Perturbations: Fragile or robust
Anything is
possible,
consistent
with the
theorem.
S
L
F
log r Resource scarcity 0 S log(n)
l
log = Path Length Complexity 0 L log(n)
n
n
log = Path Fragility 0 F log(n)
b
Theorem: F L S
Lattices and paths can be:
1. Existence: Yes or no
2. Resources: Scarce or rich
3. Perturbations: Fragile or robust
4. Complexity: Hard or easy
Anything is
possible,
consistent
with the
theorem.
We’ll just consider the 8 cases with paths.
Theorem: F L S
Fragile
n
F log
b
Hard
l
L log
n
Easy
Robust
Rich
Scarce
-S=log(r)
Theorem: F L S
Fragile
Hard
Robust
Scarce
Rich
Easy
Theorem: F L S
Fragile
Hard
Robust
Scarce
Rich
Easy
Theorem: F L S
Hard
Fragile
Scarce
Rich
Easy
Robust
Hard
Fragile
Easy
Scarce
Rich
Easy
Robust
Occupied
Empty
F=S, L=0
Theorem: F L S
MinPath
Hard
Fragile
Easy
Scarce
Rich
Easy
Robust
F=S, L=0
Theorem: F L S
Most
robust
possible.
Fragile
Easy and Fragile
Hard
Scarce
Rich
F=log(n)>S, L=0
Theorem: F L S
Easy
Robust
Hard
Fragile
Scarce
F=S+L
Rich
Easy
m
d
Robust
b
Occupied
Empty
MinPath
Theorem: F L S
r = density
b = MinCut barrier length
l = MinPath length
n = length of side
m = # of “cells”
d = width of open regions
To construct asymptotically tight cases
where rn2 = lb, consider the lattice below.
n m(b d ) d
l n m(n 2b 1)
r n 2 n 2 (m 1)d (n b)
nd
(n 2b 1)
bd
nb nd n 2 2nb n dn 2bd d
bd
n 2 n nb 2nb nd dn 2bd d
bd
n 2 n nb 2bd d
n2
bd
bd
for 1 (b d ) n l
and
n
m
1
l n
m
d
b
b
d
Now take limits:
Consider the limit where
n
m
1
and
1 (b d ) n l
nd
n
m
1
bd bd
r n 2 n 2 (m 1)d (n b) n 2 mdn
d
b
2
n 2 1
n
bd
bd
n2
r n2
l
lb r n 2
bd
b
By constructing lattices as below,
with n>>m>>1, it is possible to
find lattices such that any rn2 lb,
with r<1 is achievable.
F=S+L
Hard
Fragile
Scarce
Rich
Easy
Robust
Theorem: F L S
The Fragile Face
Hard
Fragile
Scarce
Rich
Easy
Theorem: F L S
Robust
The Four Corners
Hard
Fragile
Scarce
Rich
Easy
Robust
Theorem: F L S
F=S+L
Fragile
Most Fragile
F>>S
Scarce
Most Robust
F=S
Easy
Robust
Theorem: F L S
Hard
Random
Fragile
Scarce
Rich
Easy
Robust
Theorem: F L S
Hard
Fragile
Scarce
Rich
Efficient and Easy
robust is far from
random
Air bags
Temperature control
EGR control
Electronic fuel injection
Electronic ignition
Electric power
steering (PAS)
Anti-lock brakes
Active
suspension
Electronic transmission
Cruise control
Robust
Fragility Complexity Scarcity
• How general is this?
• Seems to hold in all theory where it has been
investigated.
• Extensive literature on ill-conditioning in LPs and
numerical linear algebra.
• Anecdotally, seems to capture essence of many
complexity problems.
• Needs to be combine with laws constraining net
system fragility.
Phase transitions
Complexity
Bad news and good news
• Bad news? Some hoped-for connections between
phase transitions and complexity are not there.
• Good news?: Ideas still interesting.
• Lots more really good news!
• The alternative is much richer and useful, and
connects in interesting ways with phase transitions
• New algorithms, new mathematics, new practical
applications,…
• And deep implications for physics.
Phase
transitions
?
Complexity
Physics and the edge
of chaocritiplexity
• Internet traffic and topology
• Biological and ecological
networks
• Evolution and extinction
• Earthquakes and forest fires
• Finance and economics
• Social and political systems
Air bags
Temperature control
EGR control
Active
suspension
Electronic fuel injection
Electronic ignition
Electric power
steering (PAS)
Anti-lock brakes
Electronic transmission
Cruise control
Phase
transitions
?
Complexity
Physics and the edge
of chaocritiplexity
• Internet traffic and topology
• Biological and ecological
Rich new unifying
networks
theory
complex
• Evolution
andofextinction
control, communication,
• Earthquakes
and forest fires
and computing
systems
• Finance
and economics
• Social and political systems
• Ubiquity of power laws
• Coherent structures in shear
flow turbulence
• Macro dissipation and
irreversibility vs. micro
reversibility.
• Quantum entanglement,
measurement, and the
QM/Classical transition
• Growing group of physicists
and experimentalists are
joining this effort (Carlson,
Mabuchi, Doherty,
Gharib,…)
Physics and the edge
of chaocritiplexity
Rich new unifying
theory of complex
control, communication,
and computing systems
More powerful bounds for the co-NP side
Semialgebraic geometry
+
convex optimization (SDP)
• Polynomial time computation.
• Never worse than the standard.
• Exhausts co-NP.
x R F ( x) ?
n
Polynomial functions: NP-hard problem.
0
1
k
k+1
Trivially sharp "phase transition" at
max F ( x)
x
Complexity?
Special case:
Scalar QP
M x R n | x Ax x b c
c
n
M x R | 1 x
b/2
b / 2 1
0
A x
c b / 2
0
b/2
A
Assume for nontriviality that A 0.
Special case:
Scalar QP
M x R n | x Ax x b c
c
b/2
b / 2
0
A
bA1b / 4 c
1) "phase transition" when c bA1b / 4
2) complexity depends only on bA1b
3) 1) and 2) are only trivially related
x R F ( x) ?
n
• Polynomial functions: NP-hard problem.
• A “simple” relaxation (Shor): find the minimum γ
such that γ- F(x) is a sum of squares (SOS).
•
•
•
•
Upper bound on the global maximum.
Solvable using SDP, in polynomial time.
A concise proof of nonnegativity.
Surprisingly effective (Parrilo & Sturmfels 2001).
• Exactly as in QP case, SAT “phase transition” does not
imply complexity.
• SOS/SDP relaxations much faster than standard algebraic
methods (QE,GB, etc.).
• Before SOS/SDP, might have conjectured that this was an
example of phase transition induced complexity.
• SOS/SDP gives certified upper bound in polynomial time.
• If exact, can recover an optimal feasible point.
• Surprisingly effective:
– In more than 10000 “random” problems, always the correct
solution…
• Bad examples do exist (otherwise NP=co-NP), but “rare.”
– Variations of the Motzkin polynomial.
– Reductions of hard problems (e.g. NPP is nice)
– None could be found using random search…
Sums of squares (SOS)
A sufficient condition for nonnegativity:
fi ( x) : p( x) fi 2 ( x) ?
i
• Convex condition (Shor, 1987)
• Efficiently checked using SDP (Parrilo).
Write:
p( x) z Qz,
T
Q0
where z is a vector of monomials. Expanding and equating
sides, obtain linear constraints among the Qij.
Finding a PSD Q subject to these conditions is exactly a
semidefinite program (LMI).
Nested families of SOS (Parrilo)
x p( x) 0
iff
g ( x) SOS, f i ( x) :
g ( x) p( x) f i ( x) ?
2
i
Nested families
gk ( x)
e.g. x
2k
i
exhaust co-NP
0
1
k
Conjectures on why such a boring “phase transition:”
• One polynomial is generically robust, therefore no
complexity.
• QPs capture the essence of this.
• Can make up other “phase transitions” which create
fragilities, and thus the possibility of complexity
k+1
x R , f ( x) ?
where f is a multivariate polynomial
n
M M M nested family of model sets
P PP
Search for
counterexample
M
coNP
?
P
NP
Search
for proof
nested family of proof sets
Positivstellensatz
Search for
counterexample
M
?
P
Search
for proof
{x R n :
fi ( x) 0,
gi ( x) 0}
f cone( fi ), g ideal( gi ) :
f 1 g 0
• Convex, but infinite dimensional.
• Efficient (P time) search subsets
(relaxations) using SOS/SDP (Parrilo)
• Guaranteed to converge
Search for simple
counterexample
M M
M M M
P
P
Search for
short proof
M M M nested family of model sets
P PP
nested family of proof sets
{x R n :
M
P
fi ( x) 0,
gi ( x) 0}
f cone( fi ), g ideal( gi ) :
f 1 g 0
M x R n1 | Ax b 0
Special case: LP
P R1 m | 0, b 0, A 0
Cone( Ax b) ( Ax b) | 0
( Ax b) 1 0 A 0, b 1 0
data vk
NPP
vk S1 S2
partition ?
S1 S2
v v ?
k
S1
k
S2
Choose random n-bit integer vk complex fragile
Fragile = large changes in solution from small changes in data
NPP
{x R :
n
x
k
2
data vk
0,
xk vk
2
2
0}
fragile
{x R n : xk
2
x v
2
k
k
2 2
0}
Choose random n-bit integer vk complex fragile
k
NPP f
Random f
x R n , f ( x) ?
where f is a multivariate polynomial
{x R :
n
x
k
2
0,
xk vk
2
{ R, R x R : xk k
n
0 0
0 1
{ ,
0 1
n
2
0 k vk 2
1
0
1
0
0}
x
0
1
0
2
k
2
vk
0
0
n
2
0}
0}
Very unlikely to be feasible. Contrast with random polynomial.
• Complexity is caused by fragility (ill-conditioning).
• Another example: Purely satisfiable QCP
• Phase transitions are, in general, unrelated to complexity
• Random scalar QP problems are generically robust (wellconditioned) and thus simple
M x R n | x Ax x b c
c
b/2
b / 2
0
A
1) "phase transition" when c bA1b / 4
2) complexity depends only on bA1b
3) 1) and 2) are only trivially related
Phase transitions
Complexity
More powerful bounds for the co-NP side
Semialgebraic geometry
+
convex optimization (SDP)
• Polynomial time computation.
• Never worse than the standard.
• Exhausts co-NP.
A key insight
Think of LMIs as quadratic forms, not as matrices.
LMIs: quadratic forms, that are positive definite.
• General forms , not necessarily quadratic.
• Instead of nonnegativity (NP-hard), use sum of squares.
SOS: multivariable forms, that are sum of squares.
M M M nested family of model sets
P PP
nested family of proof sets
Search for
counterexample
M
?
P
Search
for proof
• Models describe sets of possible
(uncertain) behaviors intersected with sets
of unacceptable behaviors (failures)
• Thus verification of robustness (of
protocols, embedded, dynamics, etc)
involves showing that a set is empty.
• Searching for an element x M is in NP,
since checking whether a given x M is
typically in P.
• Proving that M is empty is in coNP and
there may not be short proofs.
M M M nested family of model sets
P PP
Search for
counterexample
M
?
P
Seach
for proof
{x R n :
nested family of proof sets
fi ( x) 0,
gi ( x) 0}
f cone( fi ), g ideal( gi ) :
f 1 g 0
• Convex, but infinite dimensional.
• Efficient (P time) search subsets
(relaxations) using SOS/SDP
• Guaranteed to converge
Search for simple
counterexample
M M
M M M
P
P
Search for
short proof
M M M nested family of model sets
P PP
nested family of proof sets
{x R n :
M
P
fi ( x) 0,
gi ( x) 0}
f cone( fi ), g ideal( gi ) :
f 1 g 0
M x R n1 | Ax b 0
Special case: LP
P R1 m | 0, b 0, A 0
Cone( Ax b) ( Ax b) | 0
( Ax b) 1 0 A 0, b 1 0
Search for simple
counterexample
M M
M M M
P
P
Search for
short proof
M M M nested family of model sets
P PP
nested family of proof sets
Search for simple
counterexample
M M
M M M
Failure to find
short proof implies
some relaxed model
is nonempty (which
is bad).
P
P
Search for
short proof
M M M nested family of model sets
P PP
nested family of proof sets
Sums of squares (SOS)
A sufficient condition for nonnegativity:
fi ( x) : p( x) fi 2 ( x) ?
i
• Convex condition (Shor, 1987)
• Efficiently checked using SDP (Parrilo).
Write:
p( x) z Qz,
T
Q0
where z is a vector of monomials. Expanding and equating
sides, obtain linear constraints among the Qij.
Finding a PSD Q subject to these conditions is exactly a
semidefinite program (LMI).
Nested families of SOS (Parrilo)
x p( x) 0
iff
g ( x) SOS, f i ( x) :
g ( x) p( x) f i ( x) ?
2
i
Nested families
gk ( x)
e.g. x
2k
i
exhaust co-NP
0
1
k
, F ( ) ?
A Few Applications
• Nonlinear dynamical systems
– Lyapunov function computation
– Bendixson-Dulac criterion
– Robust bifurcation analysis
• Continuous and combinatorial optimization
– Polynomial global optimization
– Graph problems: e.G. Max cut
– Problems with mixed continuous/discrete vars.
• Hybrid???
Let’s see some examples…
Continuous Global Optimization
• Polynomial functions: NP-hard problem.
• A “simple” relaxation (Shor): find the maximum γ
such that f(x) – γ is a sum of squares.
•
•
•
•
Lower bound on the global optimum.
Solvable using SDP, in polynomial time.
A concise proof of nonnegativity.
Surprisingly effective (Parrilo & Sturmfels 2001).
•
•
•
•
Much faster than exact algebraic methods (QE,GB, etc.).
Provides a certified lower bound.
If exact, can recover an optimal feasible point.
Surprisingly effective:
– In more than 10000 “random” problems, always the correct
solution…
• Bad examples do exist (otherwise NP=co-NP), but “rare.”
– Variations of the Motzkin polynomial.
– Reductions of hard problems.
– None could be found using random search…
More general framework
A model co-NP problem:
Check emptiness of semialgebraic sets.
Obtain LMI sufficient conditions.
Can be made arbitrarily tight, with more
computation.
Polynomial time checkable certificates.
Semialgebraic Sets
• Semialgebraic: finite number of polynomial equalities
and inequalities.
f i ( x) 0, gi ( x) 0
• Continuous, discrete, or mixture of variables.
• Is a given semialgebraic set empty?
– Feasibility of polynomial equations: NP-hard…
• Search for bounded-complexity emptiness proofs, using
SDP. (Parrilo 2000)
Positivstellensatz (Real Nullstellensatz)
{x R : f i ( x) 0, gi ( x) 0} is empty
n
if and only if
f cone ( f i ), g ideal ( gi ) : f 1 g 0
• Stengle, 1974
• Generalizes Hilbert’s Nullstellensatz and LP duality
• Infeasibility certificates of polynomial equations over the
real field.
• Parrilo: Bounded degree solutions computed via SDP!
• Nested family of polytime relaxations: for quadratics,
the first level is the S-procedure…
Combinatorial optimization: MAX CUT
•Given a graph
•Partition the nodes in two subsets
•To maximize the number of
edges between the two subsets.
A mathematical formulation:
max
yi {1,1}
1
2
w (1 y y )
ij
i, j
Hard combinatorial problem (NP-complete).
Compute upper bounds using convex relaxations.
i
j
Standard semidefinite relaxation:
max trace D
Dual problems
D W
min trace WY
Y 0,Yii 1
This is just a first step. We can do better!
The new tools provide higher order relaxations.
Tighter bounds are obtained.
Never worse than the standard relaxation.
In some cases (n-cycle, Petersen graph), provably better.
Still polynomial time.
MAX CUT on the Petersen graph
The standard SDP upper bound: 12.5
Second relaxation bound: 12.
The improved bound is exact. A corresponding coloring.
Finding Lyapunov functions
V V f 0
V 0
• Ubiquitous, fundamental problem
• Algorithmic LMI solution
Convex, but still NP hard.
Test using SOS and SDP.
After optimization: coefficients of V.
A Lyapunov function V, that proves stability.
Finding Lyapunov functions
V V f 0
Given:
x 2 y 3x 2 x 3
y 6 x 2 y
• Ubiquitous, fundamental problem
• Algorithmic LMI solution
Propose:
V ( x, y )
i j
c
x
ij y
i j 4
After optimization: coefficients of V.
A Lyapunov function V, that proves stability.
Conclusion: a certificate of global stability
5
c=1
c=2.164
c=10
0
-5
-10
-15
-10
-5
0
5
10
-10
-5
0
5
10
-10
-5
0
5
2
1.5
1
x2
0.5
0
-0.5
-1
-1.5
-2
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
x1
Global stability of a switching system using 4th
order MLFs defined in 6 equiangular partitions
2
DS applications: Bendixson-Dulac
( rf ) 0
•
In 2D rules out periodic orbits.
•
Higher dimensional generalizations (Rantzer) provide
•
•
Weaker stability criterion than Lyapunov (allowing
a zero-measure set of divergent trajectories).
•
Convexity for synthesis.
How to search for ρ ?
DS applications: Bendixson-Dulac
• Restrict to polynomial (or rational) solutions, use SOS.
• As for Lyapunov, now a fully algorithmic procedure.
Given:
x y
Propose:
r a bx cy
y x y x 2 y 2
After optimization:
( rf )
1
a 3,
2
b 3,
c 1
1
1
1 2 1 1
3 y 3 x 3 3
3
6
2
2 2
0
Conclusion: a certificate of the inexistence of periodic orbits
x'=y
2
y'=-x-y+x
+y
2
3
2
y
1
0
-1
-2
-3
-3
-2
-1
0
x
1
2
3
Conclusion: a certificate of the inexistence of periodic orbits
x'=y
y
saddle
stable
Stronger μ upper bounds
• Structured singular value µ is NP-hard (as general QP)
• Standard µ upper bound can be interpreted:
•As a computational scheme.
•As an intrinsic robustness analysis question (timevarying uncertainty).
•As the first step in a hierarchy of convex relaxations.
•For the four-block Morton & Doyle counterexample:
Standard upper bound:
1
Second relaxation:
0.895
Exact µ value:
0.8723
What is the message ?
Even if short proofs are not guaranteed to exist,
in many cases they do.
What happens in the broader setting of
robustness and verification?
Line of Attack
• Want to decouple
– System complexity
– Complexity of verification.
“bad”
region
Nominal
System
• Even for extremely complex systems,
there may exist simple robustness proofs.
Try to look for those first…
What is the message ?
Even if short proofs are not guaranteed to exist,
in many cases they do.
WHY ?
• Partly intrinsic (as in optimization problems),
but can also be a consequence of design.
• Robustness, verifiability, and complexity
are inextricably linked.
• Lots of circumstantial evidence:
– All our previous experience in robustness analysis and
optimization: µ upper bounds, etc.
– Hard mathematical results, linking complexity with distance to
set of ill-posed instances (Smale, etc).
What are these short proofs?
Admit multiple interpretations:
– Alternative reformulations (perhaps more natural).
– Relaxation of assumptions (LTI -> LTV,
commutativity, etc.)
– Purely computational schemes.
– Bounded depth derivations.
About synthesis…
• Everything discussed is for analysis or verification.
x P( x) ?
• Synthesis is a much more complicated beast.
y x P( x, y ) ?
• In general, in higher complexity classes, harder than
NP-hard (Tierno & Doyle 1995).
• Alternating quantifiers, relativized Turing machines:
the polynomial time hierarchy.
The polynomial time hierarchy
...
...
3
3
2
2
1
1
Synthesis
Co-NP
x P( x)?
y x P( x, y)?
NP
0 0
P
Analysis
Why are LMIs ubiquitous?
y x P( x, y) 0
• In general is Π2-hard.
• No current hope of solving this efficiently.
• But when P(x,y) is quadratic in x and affine in y…
• Drops two levels to P, polynomial time !
P(x,y) is quadratic in x and affine in y
y x P( x, y) 0
State feedback synthesis: (A+BK)X -1 AX -1 +BKX -1
Output feedback: eg H , multiobjective
LPV synthesis
Lyapunov fcn for nonlinear 1-dim systems
Backstepping: Lower triangular structure
• Synthesis results depend on hand-crafted “tricks”
that we don’t fully understand yet.
• Until recently we could say the same about analysis,
where custom techniques abound.
• For analysis, there’s a method in the madness,
earlier results unified and expanded.
Entangled Quantum States
(Doherty, Parrilo, Spedalieri 2001)
• Entangled states are one of the most important
distinguishing features of quantum physics.
• Bell inequalities: hidden variable theories must be nonlocal.
• Teleportation: entanglement + classical communication.
• Quantum computing: some computational problems may
have lower complexity if entangled states are available.
How to determine whether or
not a given state is entangled ?
• QM state described by psd Hermitian matrices ρ
• States of multipartite systems are described by
operators on the tensor product of vector spaces
• Product states: r s 1 1
• each system is in a definite state
A
s1
B
1
pis i i , 0 pi ,
• Separable states: r
• a convex combination of product states.
p
•Entangled states: those that cannot be written as a
convex combination of product states.
i
1
Decision problem: find a decomposition of r as a convex
combination of product states or prove that no such
decomposition exists.
(Hahn-Banach Theorem)
Z
Separable
states
ρ
Z is an “entanglement witness,”
a generalization of Bell’s
inequalities
Theorem (Horodecki 1996): a state ris entangled if and
only if there exists a Hermitian Z such that:
Tr r Z 0
x, y Tr xx* yy* Z Z ij ;kl xi x*j yk yl* 0 Hard!
First Relaxation
Restrict attention to a special type of Z:
Tr r Z Z ij ;kl xi x j yk y G m ;ik xi yk H m ;ik xi y k
*
x y G x y x y
*
* 2
2
*
l
*
T
H x y
*
T
T2
Tr r G r H
The bihermitian form Z is a sum of squared magnitudes.
T2
minimize Tr r G r H
subject to G 0, H 0
If minimum is less
than zero, ris
entangled
First Relaxation
• Equivalent to known condition
• Peres-Horodecki Criterion, 1996
• Known as PPT (Positive Partial Transpose)
• Exact in low dimensions
• Counterexamples in higher dimensions
T2
minimize Tr r G r H
subject to G 0, H 0
If minimum is less
than zero, ris
entangled
Further relaxations
Broaden the class of allowed Z to those for which
x Z
2
i
*
*
l
x x j yk y
ij;kl i
is a sum of squared magnitudes.
Also a semidefinite program.
Strictly stronger than PPT.
Can directly generate a whole hierarchy of tests.
Second Relaxation
x Z
2
i
xi x j yk y Gm;ijk xi yk x j H m;ijk x i yk x j
*
ij ;kl
2
*
l
K m;ijk xi y k x j
*
minimize
subject to
*
2
TrrZ
G0 H 0 K 0
x y x * Z I x y x x y x * G H T K T x y x
1
2
If the minimum is less than zero then ris entangled.
Detects all the non-PPT entangled states tried…
2
Quantum entanglement and Robust control
Entanglement
Robustness
Exact problem
is hard
Is r entangled?
Robust?
Known sufficient
condition
PPT
Upper bound
Counterexamples
Exact in low dimensions
Horodecki-Choi
Morton/Packard/Doyle
Quantum entanglement and Robust control
Exact problem
is hard
Known sufficient
condition
Counterexamples
Higher order
relaxations
Entanglement
Robustness
Is r entangled?
Robust?
Equivalent
Horodecki-Choi
Morton/Packard/Doyle
Equivalent
Higher order relaxations
•
•
•
•
•
•
•
Nested family of SDPs
Necessary: Guaranteed to converge to true answer
No uniform bound (or P=NP)
Tighter tests for entanglement
Improved upper bounds in robust control
Special cases of general approach
All of this is the work of Pablo Parrilo (PhD,
Caltech, 2000, now Professor at ETHZ)
• My contribution: I kept out of his way.
Summary
• Single framework with substantial advances in
–
–
–
–
–
–
Testing entanglement
MaxCut
Global continuous optimization
Finding Lyapunov functions for nonlinear systems
Improved robustness analysis upper bounds
Many other applications
• This is just the tip of a big iceberg
Nested relaxations and SDP
Exact problem
is hard
Known
sufficient
condition
Higher order
relaxations
Robustness
coNP hard
problem
Robust?
x P( x) ?
Standard upper
bound
Usually a
known
relaxation
Sharper sufficient conditions.
Converges to exact solution.
• Huge breakthroughs…
• …but also a “natural” culmination of more than 2
decades of research in robust control.
• Initial applications focus has been CS and physics,
• … but substantial promise for “persistent
mysteries” in controls and dynamical systems
• Completely changes the possibilities for
– robust hybrid/nonlinear control
– interactions with CS and physics
• Unique opportunities for controls community
–
–
–
–
Resolve old difficulties within controls
Unify and integrate fragmented disciplines within
Unify and integrate without: comms and CS
Impact on physics and biology
• Unique capabilities of controls community
– New tools, but built on robust control machinery
– Unique talent and training
p P Rm
x(0) X R
w W
n
Problem: In general,
computation grows
exponentially with m and n.
p0
parameters
x f ( x, p, w)
w
dynamics
noise, disturbances
Key idea: systematic search for short proofs.
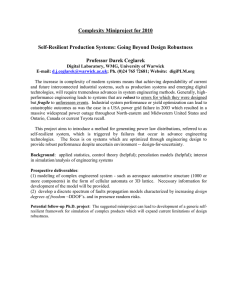
Chemical oscillator (Prajna, Papachristodoulou)
2 X Y 3X
A
X
Y B
A, B
constant
Nondimensional state equations
x axx y
2
y bx y
2
x axx y
Limit cycle for
y bx y
b a b a
2
2
1
0.8
a
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
b
1
1.2
1.4
3
3
2.5
a = 0.1, b = 0.13
2
1.5
1
0.8
a
1
0
0.6
0.1
0.2
0.4
0.2
0
0
0.2
0.4
0.6
0.8
b
1
1.2
1.4
0.3
0.4
0.5
0.6
aa
bb
1
0.8
a
0.6
b, a
0.4
0.2
0
0
0.2
0.4
0.6
0.8
b
1
1.2
1.4
0ax x y
equilibrium
0bx y
2
x a x x x x y y
2
y b x x y y
2
x x
2
2
y y
2
aa
bb
2
x axx y
2
2
y bx y
2
For what a, b does there
V 0
exist V ( x, y ) such that
V V f 0
0ax x y
2
x a x x x x y y
2
y b x x y y
0bx y
2
x x
2
2
y y
2
2
2
aa
bb
4 order V ( x, y)
th
1
0.8
a
b, a
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
b
1
1.2
1.4
a = 0.6, b = 1.1
1
0.8
y
0.6
0.4
0.2
0
1
1.5
x
2
2.5
a = 1, b = 2
1
0.8
0.6
0.4
0.2
0
2.2
2.6
3
3.4
Features of new approach (Parrilo)
• SOS/SDP: Based on Sum-of-square (SOS)
and semidefinite programming (SDP)
• Exist “gold standard” relaxation algorithms
for canonical coNP hard problems, such as
– MaxCut
– Quantum entanglement
– Robustness () upper bound
• All special cases of first step of SOS/SDP
• Further steps (all in P) converge to answer
• No uniform bound (or P=NP)
• Standard tools of robust (linear) control
–
–
–
–
Unmodeled dynamics, nonlinearities, and IQCs
Noise and disturbances
Real parameter variations
D-K iteration for -synthesis
• Are all treated much better…
• And generalized to
–
–
–
–
Nonlinear
Hybrid
DAEs
Constrained
Caveats
• Inherits difficulties from robust control
• High state dimension and large LMIs
• Must find ways to exploit structure,
symmetries, sparseness
• Note: many researchers don’t want to get rid
of the ad hoc, handcrafted core of their
approaches to control (why take the fun out
of it?)