Tools for Specification, Verification, and Synthesis of Reactive Systems
advertisement

Tools for Specification, Verification,
and Synthesis of Reactive Systems
Tevfik Bultan
Department of Computer Science
University of California, Santa Barbara
bultan@cs.ucsb.edu
http://www.cs.ucsb.edu/~bultan/
http://www.cs.ucsb.edu/~bultan/composite/
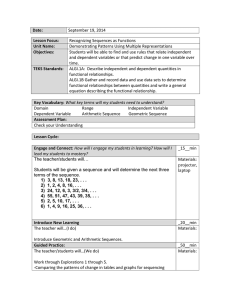
Tools for Specification, Verification, and
Synthesis of Reactive Systems
Action Language
specification
Action Language
Parser
Action Language
Verifier
Code Generator
Verified code
Composite Symbolic
Library
Omega
Library
CUDD
Package
Composite Model Checking
Can model checking be extended to verification of
specifications with arithmetic constraints?
– [Bultan, Gerber, Pugh CAV97, TOPLAS99] Using Presburger
(linear) arithmetic constraints for model checking infinite
state systems
Problem: Most specifications have a combination of
integer, boolean and enumerated variables
– [Bultan, Gerber, League ISSTA98, TOSEM00] Composite
model checking:
• Model checking with type-specific symbolic representations
• Uses Presburger arithmetic constraints and BDDs together
Composite Symbolic Library
[Yavuz-Kahveci, Tuncer, Bultan TACAS01, FROCOS02]
A symbolic manipulator that can handle boolean and integer
variables (linear arithmetic constraints)
Built on top of other symbolic manipulators
– Omega Library [Pugh et al.]: a Presburger arithmetic formula
manipulator (based on polyhedral representations)
– CUDD package [Somenzi et al.]: a Boolean logic formula
manipulator (a BDD package)
Uses a disjunctive representation to combine arithmetic
constraints with BDDs
Uses an object oriented design
– Every symbolic representation is derived from an abstract class
• We wrote wrappers around Omega Library and CUDD package
– Can be extended to other variable types if a symbolic
representation is provided for them
Action Language
[Bultan ICSE00] [Bultan, Yavuz-Kahveci ASE01]
Initial goal
– To develop an input specification language for our composite
model checker
Broader perspective
– Develop a low level specification language for model
checking
– The language should be able to “handle” different high level
specification languages
Applications
Safety-critical system specifications
– SCR (tabular), Statecharts (hierarchical state machines)
specifications [Bultan, Gerber, League ISSTA98, TOSEM00]
Concurrent programs
– Synthesizing verified monitor classes from specifications
[Yavuz-Kahveci, Bultan, 02]
Protocol verification
– Verification of parameterized cache coherence protocols
using counting abstraction [Delzanno, Bultan CP01]
Verification of workflow specifications
– Verification of acyclic decision flows [Fu, Bultan, Hull, Su
TACAS01]
Outline
Specification Language: Action Language
– Synchronous vs. asynchronous composition
– Translating hierarchical and tabular specifications to Action
Language
Verification Engine
– Constraint-based verification
– Composite Symbolic Library
Synthesizing Verified Monitors
– Airport Ground Traffic Control case study
Related, Current and Future Work
Model Checking View
Every reactive system
– safety-critical software specification,
– cache coherence protocol,
– mutual exclusion algorithm, etc.
is represented as a transition system:
– S : The set of states
– I S : The set of initial states
– R S S : The transition relation
Model Checking View
Properties of reactive systems are expressed in
temporal logics
Invariant(p) : is true in a state if property p is true in
every state reachable from that state
– Also known as AG
Eventually(p) : is true in a state if property p is true at
some state on every execution path from that state
– Also known as AF
Action Language
A state based language
– Actions correspond to state changes
States correspond to valuations of variables
– Integer (possibly unbounded), boolean and enumerated
variables
– Parameterized constants (verified for every possible value of
the constant)
Transition relation is defined using actions
– Atomic actions: Predicates on current and next state variables
– Action composition:
• synchronous (&) or asynchronous (|)
Modular
– Modules can have submodules
– Modules are defined as synchronous and asynchronous
compositions of its actions and submodules
Actions in Action Language
Atomic actions: Predicates on current and next state
variables
–
–
–
–
–
Current state variables: reading, nr,
Next state variables: reading’, nr’,
Logical operators: not (!) and (&&)
Equality: = (for all variable types)
Linear arithmetic: <, >, >=, <=, +,
busy
busy’
or (||)
* (by a constant)
An atomic action:
!reading and !busy and nr’=nr+1 and reading’
An Action Language Specification
module main()
integer nr;
boolean busy;
restrict: nr>=0;
initial: nr=0 and !busy;
module Reader()
boolean reading;
initial: !reading;
rEnter: !reading and !busy and
nr’=nr+1 and reading’;
rExit: reading and !reading’ and nr’=nr-1;
Reader: rEnter | rExit;
endmodule
module Writer()
boolean writing;
initial: !writing;
wEnter: !writing and nr=0 and !busy and
busy’ and writing’;
wExit: writing and !writing’ and !busy’;
Writer: wEnter | wExit;
endmodule
main: Reader() | Reader() | Writer() | Writer();
spec: invariant([busy => nr=0])
endmodule
A Closer Look
module main()
integer nr;
boolean busy;
restrict: nr>=0;
initial: nr=0 and !busy;
S : Cartesian product of
variable domains defines
the set of states
I : Predicates defining
the initial states
module Reader()
R : Atomic actions of the
boolean reading;
Reader
initial: !reading;
rEnter: !reading and !busy and
nr’=nr+1 and reading’;
rExit: reading and !reading’ and nr’=nr-1;
Reader: rEnter | rExit;
endmodule
R : Transition relation of
Reader defined as
module Writer()
asynchronous composition
...
of its atomic actions
endmodule
main: Reader() | Reader() | Writer() | Writer();
spec: invariant([busy => nr=0])
endmodule
R : Transition relation of main defined as
asynchronous composition of two Reader and
two Writer processes
Asynchronous Composition
Asynchronous composition is equivalent to
disjunction if composed actions have the same next
state variables
a1: i > 0 and i’ = i + 1;
a2: i <= 0 and i’ = i – 1;
a3: a1 | a2
is equivalent to
a3: (i > 0 and i’ = i + 1)
or (i <= 0 and i’ = i – 1);
Asynchronous Composition
Asynchronous composition preserves values of
variables which are not explicitly updated
a1 : i > j and i’ = j;
a2 : i <= j and j’ = i;
a3 : a1 | a2;
is equivalent to
a3 : (i > j and i’ = j) and j’ = j
or (i <= j and j’ = i) and i’ = i
Synchronous Composition
Synchronous composition is equivalent to conjunction
if two actions do not disable each other
a1: i’ = i + 1;
a2: j’ = j + 1;
a3: a1 & a2;
is equivalent to
a3: i’ = i + 1 and j’ = j + 1;
Synchronous Composition
A disabled action does not block synchronous
composition
a1: i < max and i’ = i + 1;
a2: j < max and j’ = j + 1;
a3: a1 & a2;
is equivalent to
a3: (i < max and i’ = i + 1 or i >= max & i’ = i)
and (j < max & j’ = j + 1 or j >= max & j’ = j);
Statecharts
[Harel 87]
Hierarchical state machines
States can be combined to form superstates
OR decomposition of a superstate
– The system can be in only one of the OR states at any given
time
AND decomposition of a superstate
– The system has to be in both AND states at the same time
Transitions
– Transitions between states
Statecharts to Action Language
Statecharts transitions (arcs) correspond to actions
OR states correspond to enumerated variables and
they define the state space
Transitions (actions) of OR states are combined
using asynchronous composition
Transitions (actions) of AND states are combined
using synchronous composition
Statecharts to Action Language
Alarm
Shut
Op
t1
t2
Mode
Vol
On
t4
1
t5
Off
t3
t6
t7
2
module main()
enumerated Alarm {Shut, Op};
enumerated Mode {On, Off};
enumerated Vol {1, 2};
initial: Alarm=Shut and
Mode=Off and Vol=1;
t1: Alarm=Shut and Alarm’=Op
and Mode’=On and Vol’=1;
t2: Alarm=Shut and Alarm’=Op
and Mode’=Off and Vol’=1;
t3: Alarm=Op and Alarm’=Shut;
t4: Alarm=Op and Mode=On and
Mode’=Off;
t5: Alarm=Op and Mode=Off and
Mode’=On;
...
main: t1 | t2 | t3 |
(t4 | t5) & (t6 | t7);
endmodule
Preserves the structure of the
Statecharts specification
SCR
[Courtois and Parnas 93], [Heitmeyer et al. 96]
Tabular specifications
– Mode transition tables
– Condition tables
– Event tables
Events
– @T(c) = c c’
– In action language: !c and c’
– @T(c) WHEN d = c c’ d
– In action language: !c and c’ and d
SCR to Action Language
Each row in an SCR table corresponds to an action
The transition relation of a table is defined by
asynchronous composition of actions that correspond
to its rows
The transition relation of the whole system is defined
by synchronous composition of the transition
relations of the tables
SCR to Action Language
Heater
Old Mode
Event
New Mode
Off
@T(temp < low)
On
On
@T(temp low)
Off
AC
Old Mode
Event
New Mode
Off
@T(temp > high)
On
On
@T(temp high)
Off
module main()
enumerated Heater {On, Off};
enumerated AC {On, Off};
integer temp;
parameterized integer low,
high;
initial: low<=temp<=high
and Heater=AC=Off;
r1: !(temp<low) and temp’<low
and Heater=Off and Heater’=On;
r2: !(temp>=low) and temp’>=low
and Heater=On and
Heater’=Off;
t_heat: r1 | r2;
...
main: t_heat & t_AC;
endmodule
Outline
Specification Language: Action Language
– Synchronous vs. asynchronous composition
– Translating hierarchical and tabular specifications to Action
Language
Verification Engine
– Constraint-based verification
– Composite Symbolic Library
Synthesizing Verified Monitors
– Airport Ground Traffic Control case study
Related, Current and Future Work
Model Checking
Given a program and a temporal property p:
Either show that all the initial states satisfy the
temporal property p
– set of initial states truth set of p
Or find an initial state which does not satisfy the
property p
– a state set of initial states truth set of p
– and generate a counter-example starting from that state
Temporal Properties Fixpoints
backwardImage
of p
Backward
fixpoint
Invariant(p)
Initial
states
initial states that
violate Invariant(p)
Forward
fixpoint
forward image
of initial states
Initial
states
p
• • •
states that can reach p
i.e., states that violate Invariant(p)
• • •
reachable states
of the system
p
reachable states
that violate p
Symbolic Model Checking
Represent sets of states and the transition relation as
Boolean logic formulas
Forward and backward fixpoints can be computed by
iteratively manipulating these formulas
– Forward, backward image: Existential variable elimination
– Conjunction (intersection), disjunction (union) and negation
(set difference), and equivalence check
Use an efficient data structure for manipulation of
Boolean logic formulas
– BDDs
BDDs
Efficient representation for boolean functions
Disjunction, conjunction complexity: at most quadratic
Negation complexity: constant
Equivalence checking complexity: constant or linear
Image computation complexity: can be exponential
Constraint-Based Verification
Can we use linear arithmetic constraints as a
symbolic representation?
– Required functionality
• Disjunction, conjunction, negation, equivalence checking,
existential variable elimination
Advantages:
– Arithmetic constraints can represent infinite sets
– Heuristics based on arithmetic constraints can be used to
accelerate fixpoint computations
• Widening, loop-closures
Linear Arithmetic Constraints
Can be used to represent sets of valuations of
unbounded integers
Linear integer arithmetic formulas can be stored as a
set of polyhedra
F ckl
k
l
where each ckl is a linear equality or inequality
constraint and each
ckl is a polyhedron
l
Linear Arithmetic Constraints
Disjunction complexity: linear
Conjunction complexity: quadratic
Negation complexity: can be exponential
– Because of the disjunctive representation
Equivalence checking complexity: can be exponential
– Uses existential variable elimination
Image computation complexity: can be exponential
– Uses existential variable elimination
A Linear Arithmetic Constraint Manipulator
Omega Library [Pugh et al.]
– Manipulates Presburger arithmetic formulas: First order theory of
integers without multiplication
– Equality and inequality constraints are not enough: Divisibility
constraints are also needed
Existential variable elimination in Omega Library: Extension of
Fourier-Motzkin variable elimination to integers
Eliminating one variable from a conjunction of constraints may
double the number of constraints
Integer variables complicate the problem even further
– Can be handled using divisibility constraints
How about Using BDDs for Encoding
Arithmetic Constraints?
Arithmetic constraints on bounded integer variables
can be represented using BDDs
Use a binary encoding
– represent integer x as x0x1x2... xk
– where x0, x1, x2, ... , xk are binary variables
You have to be careful about the variable ordering!
Arithmetic Constraints on Bounded Integer
Variables
BDDs and constraint representations are both
applicable
Which one is better?
A case study: Verification of Workflow Specifications
Verification of Workflow Specifications
[Fu, Bultan, Su, Hull 01]
Workflow Languages
– High-level languages for business applications
– Programming for non-programmers
Vortex Language
–
–
–
–
–
–
Module based
Source attributes, target attributes
Enabling conditions
Rules, combining policies
Declarative semantics
Acyclic dependency graph
Vortex Specifications
Fast changing business logic
Rule based logic changes frequently
New rules added into system at any time
Error prone process
Automated verification?
MIHU (May I Help yoU?)
Runs behind Web Server
Decides whether to launch
the customer representative service
MIHU (May I Help yoU?)
Source Attributes: Customer ID, Shopping cart, history logs
Target Attribute: offer_AWD
Integer variables: 40
Source lines: 800
Dependency Graph of MIHU
Experiments
SUN ULTRA 10 (768 Mbyte main memory)
SMV(5bits)
SMV(10bits)
SMV(15bits)
Action
P1
12s 9MB
16min 67MB
2.6hrs 86MB
10min 93MB
P2
32s 12MB
15min 66MB
2.9hrs 86MB
10min 93MB
P3
19s 10MB
18min 67MB
2.3hrs 87MB
27.7hrs 1GB
SMV translation required several heuristics to get it running
– Disjunctive transition BDD, variable pruning, initial image projection
SMV version does not converge in 30hrs when we increase the
integer widths to 16 bits
There are properties for which Action Language Verifier did not
converge but SMV converged for 15 bits
SMV gives a false negative for property P2 for 5 bits
Both SMV and Action Language Verifier found an error for
Property 3
Arithmetic Constraints vs. BDDs
Constraint based verification can be more efficient
than BDDs for integers with large domains
BDD-based verification is more robust
Constraint based approach does not scale well when
there are boolean or enumerated variables in the
specification
Constraint based verification can be used to
automatically verify infinite state systems
– cannot be done using BDDs
Price of infinity
– CTL model checking becomes undecidable
Conservative Approximations
Compute a lower ( p ) or an upper ( p+ )
approximation to the truth set of the property ( p )
Model checker can give three answers:
I
p
p
“The property is satisfied”
sates which
violate the
property
p
I
p
“I don’t know”
I
p
p+
“The property is false and here is a counter-example”
p
Computing Upper and Lower Bounds
Approximate fixpoint computations
– Widening: To compute upper bound for least-fixpoints
• We use a generalization of the polyhedra widening operator by
Cousot and Halbwachs
– Collapsing (dual of widening): To compute lower bound for
greatest-fixpoints
– Truncated fixpoints: To compute lower bounds for leastfixpoints and upper bounds for greatest fixpoints
Loop-closures
– Compute transitive closure of self-loops
– Can easily handle simple loops which increment or
decrement a counter
Is There a Better Way?
Each symbolic representation has its own
deficiencies
BDD’s cannot represent infinite sets
Linear arithmetic constraint representations are
expensive to manipulate
– Mapping boolean variables to integers does not scale
– Eliminating boolean variables by partitioning the state-space
does not scale
Composite Model Checking
Each variable type is mapped to a symbolic
representation type
– Map boolean and enumerated types to BDD representation
– Map integer type to arithmetic constraint representation
Use a disjunctive representation to combine symbolic
representations
Each disjunct is a conjunction of formulas
represented by different symbolic representations
Composite Formulas
Composite formula (CF):
CF ::=CF CF | CF CF | CF | BF | IF
Boolean Formula (BF)
BF ::=BF BF | BF BF | BF | Termbool
Termbool ::= idbool | true | false
Integer Formula (IF)
IF ::= IF IF | IF IF | IF | Termint Rop Termint
Termint ::= Termint Aop Termint | Termint | idint | constantint
where
Rop denotes relational operators (=, , > , <, , ),
Aop denotes arithmetic operators (+,-, and * with a constant)
Composite Representation
Each composite formula A is represented as
A aij
n
t
i 1 j 1
where
– n is the number of composite atoms in A
– t is the number of basic symbolic representations
Sets of states and transitions are represented using this
disjunctive representation
Set operations and image computations are performed on this
disjunctive representation
Conjunctive Decomposition
Each composite atom is a conjunction
Each conjunct corresponds to a different symbolic
representation
– x: integer; y: boolean;
– x>0 and x’=x+1 and y´y
• Conjunct x>0 and x´x+1 will be represented by
arithmetic constraints
• Conjunct y´y will be represented by a BDD
– Advantage: Image computations can be distributed over the
conjunction (i.e., over different symbolic representations).
Composite Symbolic Library
Our library implements this approach using an objectoriented design
– A common interface is used for each symbolic
representation
– Easy to extend with new symbolic representations
– Enables polymorphic verification
– As a BDD library we use Colorado University Decision Diagram
Package (CUDD) [Somenzi et al]
– As an integer constraint manipulator we use Omega Library [Pugh
et al]
Composite Symbolic Library: Class Diagram
Symbolic
+intersect()
+union()
+complement()
+isSatisfiable()
+isSubset()
+bacwardImage()
+forwardImage()
BoolSym
–representation: BDD
+intersect()
+union()
•
•
•
CUDD Library
CompSym
IntSym
–representation: list
of comAtom
–representation: Polyhedra
+intersect()
+ union()
•
•
•
compAtom
–atom: *Symbolic
+intersect()
+union()
•
•
•
OMEGA Library
Composite Symbolic Representation
x: integer, y:boolean
(x>0 and x´x+1 and y´=true) or (x<=0 and x´x and y´y)
: CompSym
representation : List<compAtom>
: ListNode<compAtom>
data : compAtom
0 b’ y´=true
1 x>0 and x´=x+1
next :*ListNode<compAtom>
: ListNode<compAtom>
data : compAtom
0
1
y’=y
x<=0 and x’=x
next: *ListNode<compAtom>
Satisfiability Checking
boolean isSatisfiable(CompSym A)
for each compAtom b in A do
if b is satisfiable then
return true
return false
is
Satisfiable?
true
isSatisfiable? isSatisfiable? isSatisfiable?
boolean isSatisfiable(compAtom a)
for each symbolic representation t do
if at is not satisfiable then
return false
return true
false
false
is
true
is
is
Satisfiable?
and
Satisfiable?
Satisfiable?
Backward Image: Composite Representation
A:
B:
CompSym backwardImage(Compsym A, CompSym B)
CompSym C;
for each compAtom d in A do
for each compAtom e in B do
insert backwardImage(d,e) into C
return C
C:
•••
Backward Image: Composite Atom
compAtom backwardImage(compAtom a, compAtom b)
for each symbolic representation type t do
replace at by backwardImage(at , bt )
return a
b:
a:
Heuristics for Efficient Manipulation of
Composite Representation
Masking
– Mask operations on integer arithmetic constraints with
operations on BDDs
Incremental subset check
– Exploit the disjunctive structure by computing subset checks
incrementally
Merge image computation with the subset check in
least-fixpoint computations
Simplification
– Reduce the number of disjuncts in the composite
representation by iteratively merging matching disjuncts
Cache expensive operations on arithmetic constraints
Simplification Example
(y z´ = z + 1)
((y x) z´ = z + 1)
(x z´ = z + 1)
((x y) z´ > z)
((x y) (z´ = z + 1 z´ > z))
((x y) z´ > z )
((x y) z´ > z)
Polymorphic Verifier
Symbolic TranSys::check(Node *f) {
•
•
•
Symbolic s = check(f.left)
case EX:
s.backwardImage(transRelation)
case EF:
do
snew = s
sold = s
snew.backwardImage(transRelation)
s.union(snew)
while not sold.isEqual(s)
•
•
•
}
Action Language Verifier
is polymorphic
When there are no integer
variable in the specification it
becomes a BDD based model
checker
Bounded-Buffer Producer Consumer
2
pstate=i && pstate´=i+1 &&
produced´=produced && count´=count
Producer
1
pstate=N && pstate´=1 &&
count<size && produced´=produced+1
&& count´=count+1
N
2
cstate=i && cstate´=i+1 &&
consumed´=consumed && count´=count
Consumer
1
cstate=N && cstate´=1 &&
count>0 && consumed´=consumed+1
&& count´=count-1
i
N
i
Experiment
Performance of Composite Model Checker
Execution time (sec)
10
8
CMC
OMC-Partitioned
OMC-Mapped
6
4
2
0
Number of control states
SUN ULTRA 10
(768 Mbyte main memory)
CMC: Our composite model checker
OMC: Our model checker built on Omega-library
Partitioned: Control states are eliminated by partitioning the state space
Mapped: Control states are mapped to integer variables
Outline
Model Checking
Specification Language: Action Language
– Synchronous vs. asynchronous composition
– Translating hierarchical and tabular specifications to Action
Language
Verification Engine
– Constraint-based verification
– Composite Symbolic Library
Synthesizing Verified Monitors
– Airport Ground Traffic Control case study
Related, Current and Future Work
Synthesizing Verified Monitors
[Yavuz-Kahveci, Bultan 02]
Concurrent programming is difficult
– Exponential increase in the number of states by the number
of concurrent components
Monitors provide scoping rules for concurrency
– Variables of a monitor can only be accessed by monitor’s
procedures
– No two processes can be active in a monitor at the same
time
Java made programming using monitors a common
problem
Monitor Basics
A monitor has
– A set of shared variables
– A set of procedures
• which provide access to the shared variables
– A lock
• To execute a monitor procedure a process has to grab the
monitor lock
• Only one process can be active (i.e. executing a procedure) in
the monitor at any given time
Monitor Basics
What happens if a process needs to wait until a
condition becomes true?
– Create a condition variable that corresponds to that condition
Each condition variable has a wait queue
– A process waits for a condition in the wait queue of the
corresponding condition variable
– When a process updates the shared variables that may
cause a condition to become true:
it signals the processes in the wait queue of the
corresponding condition variable
Monitors
Challenges in monitor programming
– Condition variables
– Wait and signal operations
Why not use a single wait queue?
– Inefficient, every waiting process has to wake up when any
of the shared variables are updated
Even with a few condition variables coordinating wait
and signal operations can be difficult
– Avoid deadlock
– Avoid inefficiency due to unnecessary signaling
Monitor Specifications in Action Language
Monitors with boolean, enumerated and integer
variables
Condition variables are not necessary in Action
Language
– Semantics of Action Language ensures that an action is
executed when it is enabled
We can automatically verify Action Language
specifications
We can automatically synthesize efficient monitor
implementations from Action Language specifications
Readers-Writers Monitor Specification
module main()
integer nr;
boolean busy;
restrict: nr>=0;
initial: nr=0 and !busy;
module Reader()
boolean reading;
initial: !reading;
rEnter: !reading and !busy and
nr’=nr+1 and reading’;
rExit: reading and !reading’ and nr’=nr-1;
Reader: rEnter | rExit;
endmodule
module Writer()
boolean writing;
initial: !writing;
wEnter: !writing and nr=0 and !busy and
busy’ and writing’;
wExit: writing and !writing’ and !busy’;
Writer: wEnter | wExit;
endmodule
main: Reader() | Reader() | Writer() | Writer();
spec: invariant([busy => nr=0])
endmodule
What About Arbitrary Number of Processes?
Use counting abstraction [Delzanno CAV’00]
– Create an integer variable for each local state of a process
type
– Each variable will count the number of processes in a
particular state
Local states of the process types have to be finite
– Specify only the process behavior that relates to the
correctness of the monitor
– Shared variables of the monitor can be unbounded
Counting abstraction can be automated
Readers-Writers Monitor Specification After
Counting Abstraction
module main()
integer nr;
boolean busy;
parameterized integer numReader, numWriter;
restrict: nr>=0 and numReader>=0 and numWriter>=0;
initial: nr=0 and !busy;
module Reader()
integer readingF, readingT;
initial: readingF=numReader and readingT=0;
rEnter: readingF>0 and !busy and
nr’=nr+1 and readingF’=readingF-1 and
readingT’=readingT+1;
rExit: readingT>0 and nr’=nr-1 readingT’=readingT-1
and readingF’=readingF+1;
Reader: rEnter | rExit;
endmodule
module Writer()
...
endmodule
main: Reader() | Writer();
spec: invariant([busy => nr=0])
endmodule
Verification of Readers-Writers Monitor
Specification
Integers
Booleans
Cons. Time
(secs.)
Ver. Time
(secs.)
Memory
(Mbytes)
RW-4
1
5
0.04
0.01
6.6
RW-8
1
9
0.08
0.01
7
RW-16
1
17
0.19
0.02
8
RW-32
1
33
0.53
0.03
10.8
RW-64
1
65
1.71
0.06
20.6
RW-P
7
1
0.05
0.01
9.1
SUN ULTRA 10 (768 Mbyte main memory)
What about the Implementation?
We can automatically generate code from the monitor
specification
– Generate a Java class
– Make shared variables private variables
– Use synchronization to restrict access
Is the generated code efficient
– Yes!
– We can synthesize the condition variables automatically
– There is no unnecessary thread notification
Synthesized Monitor Class:
Uses Specific Notification Pattern
public class ReadersWriters{
private int nr;
private boolean busy;
private Object rEnterCond, wEnterCond;
private synchronized boolean Guard_rEnter() {
if (!busy) {
nr++;
return true;
}
All condition variables and
else return false;
wait and signal operations are
}
generated automatically
public void rEnter() {
synchronized(rEnterCond) {
while(!Guard_rEnter())
rEnterCond.wait();
}
public void rExit() {
synchronized(this) { nr--; }
synchronized(wEnterCond) { wEnterCond.notify(); }
}
...
}
Airport Ground Traffic Control
[Zhong 97] Modeling of airport operations using an
object oriented approach
A concurrent program simulating the airport ground
traffic control
– multiple planes
– multiple runways and taxiways
Can be used by controllers as advisory input
A simplified model of Seattle Tacoma International Airport from [Zhong 97]
Control Logic
An airplane can land using 16R only if no airplane is
using 16R at the moment
An airplane can takeoff using 16L only if no airplane
is using 16L at the moment
An airplane taxiing on one of the exits C3-C8 can
cross runway 16L only if no airplane is taking off at
the moment
An airplane can start using 16L for taking off only if
none of the crossing exits C3-C8 is occupied at the
moment (arriving airplanes have higher priority)
Only one airplane can use a taxiway at a time
Airport Ground Traffic Control Simulator
Simulate behavior of each airplane with a thread
Use a monitor which keeps track of number of
airplanes on each runway and each taxiway
Use guarded commands (which will become the
procedures of the monitor) to enforce the control logic
Airport Ground Traffic Control Monitor
Action Language specification
– Has 13 integer variables
– Has 4 Boolean variables per arriving airplane process to
keep the local state of each airplane
– Has 2 Boolean variables per departing airplane process to
keep the local state of each airplane
Automatically generated monitor class
– Has 13 integer variables
– Has 20 condition variables
– Has 34 procedures
Experiments
Processes
Construction
Verify-P1
Verify-P2
Verify-P3
2
0.81
0.42
0.28
0.69
4
1.50
0.78
0.50
1.13
8
3.03
1.53
0.99
2.22
16
6.86
3.02
2.03
5.07
2A,PD
1.02
0.64
0.43
0.83
4A,PD
1.94
1.19
0.81
1.39
8A,PD
3.95
2.28
1.54
2.59
16A,PD
8.74
4.6
3.15
5.35
PA,2D
1.67
1.31
0.88
3.94
PA,4D
3.15
2.42
1.71
5.09
PA,8D
6.40
4.64
3.32
7.35
PA,16D
13.66
9.21
7.02
12.01
PA,PD
2.65
0.99
0.57
0.43
Model Checking Software Specifications
[Atlee, Gannon 93] Translating SCR mode transition tables to
input language of explicit state model checker EMC [Clarke,
Emerson, Sistla 86]
[Chan et al. 98,00] Translating RSML specifications to input
language of symbolic model checker SMV [McMillan 93]
[Bharadwaj, Heitmeyer 99] Translating SCR specifications to
Promela, input language of automata-theoretic explicit state
model checker SPIN [Holzmann 97]
Specification Languages for Reactive Systems
Specification languages for verification
– [Milner 80] CCS
– [Chandy and Misra 88] Unity
– [Lamport 94] Temporal Logic of Actions (TLA)
Specification languages for model checking
– [Holzmann 98] Promela
– [McMillan 93] SMV
– [Alur and Henzinger 96, 99] Reactive Modules
Action Language TLA Connection
[Lamport TOPLAS’94]
Similarities:
– Transition relation is defined using predicates on current
(unprimed) and next state (primed) variables
– Each predicate is defined using
• integer arithmetic, boolean logic, etc.
Differences: In Action Language
– Temporal operators are not used in defining the transition
relation
• Dual language approach: temporal properties (in CTL) are
redundant, they are used to check correctness
– Synchronous and asynchronous composition operators are
not equivalent to logical operators
Constraint-Based Verification:
Not a New Idea
[Cooper 71] Used a decision procedure for Presburger
arithmetic to verify sequential programs represented
in a block form
[Cousot and Halbwachs 78] Used real arithmetic
constraints to discover invariants of sequential
programs
Constraint-Based Verification
[Halbwachs 93] Constraint based delay analysis in
synchronous programs
[Halbwachs et al. 94] Verification of linear hybrid systems
using constraint representations
[Alur et al. 96] HyTech, a model checker for hybrid
systems
Constraint-Based Verification
[Boigelot and Wolper 94] Verification with periodic sets
[Boigelot et al.] Meta-transitions
[Delzanno and Podelski 99] Built a model checker using
constraint logic programming framework
[Boudet Comon], [Wolper and Boigelot ‘00] Translating linear
arithmetic constraints to automata
[Kukula et al. 98] Comparison of automata and
constraint-based verification
– no clear winner
Automata-Based Representations for
Arithmetic Constraints
[Klarlund et al.] MONA, an automata manipulation tool
for verification
[Boudet Comon] Translating linear arithmetic constraints
to automata
[Wolper and Boigelot ‘00] verification using automata as a
symbolic representation
[Kukula et al. 98] application of automata based
verification to hardware verification
Combining Different Symbolic
Representations
[Chan et al. CAV’97]
– both linear and non-linear constraints are mapped to BDDs
– Only data-memoryless and data-invariant transitions are
supported
[Bharadwaj and Sims TACAS’00]
– Combines automata based representations (for linear
arithmetic constraints) with BDDs
– Specialized for inductive invariant checking
[Bensalem et al. 00] Symbolic Analysis Laboratory
– Designed a specification language that allows integration of
different verification tools
Current Work: New Symbolic Representations
Integrating shape analysis to Composite Symbolic
Library
– [Sagiv et al.] Shape analysis: Used for verifying linked list
implementations
– Analyze monitor specifications with linked lists
– Synthesizing concurrent data structures
Integrating automata-based constraint
representations to Composite Symbolic Library
[Bartzis, Bultan]
Current/Future Work: To Abstract or not to
Abstract
Abstraction techniques
– Restricting variable domains to finite sets
– Predicate abstraction [Graf, Saidi 97, Saidi 00]
Hybrid abstraction+constraint based verification
[Fu,Bultan,Su]
When should we use abstraction and when should
we use constraint-based techniques?
Concluding Thought
The fates of specification languages and automated
verification techniques are tied to each other
One will not succeed without the other
Goal: Developing verifiable specification languages