Physics Requirements System Component Description Tolerance Budget based on Genesis Simulations
advertisement

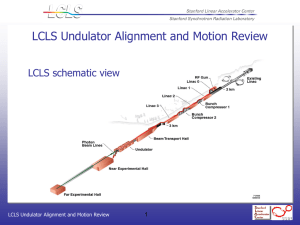
Physics Requirements Heinz-Dieter Nuhn, SLAC / LCLS October 20, 2005 System Component Description Tolerance Budget based on Genesis Simulations Requirements and Procedures Physics Requirements – October 20, 2005 1 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Linac Coherent Light Source Undulator Near Hall Far Hall Physics Requirements – October 20, 2005 2 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Physics Requirements – October 20, 2005 3 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Summary of Nominal Undulator Parameters Undulator Type Magnet Material Wiggle Plane Gap Period Length Effective On-Axis Field Range of Effective Undulator Parameter K Tolerance for K Accumulated Segment Phase Error Tolerance (at any point along segment) planar hybrid NdFeB horizontal 6.8 30.0±0.05 1.249 3.500 - 3.493 (3.480) ± 0.015% ± 10 Segment Length Number of Segments Undulator Magnetic Length 3.40 33 112.2 m Standard Break Lengths Nominal Total Device Length 47.0 - 47.0 - 89.8 131.52 cm m Quadrupole Magnet Technology Nominal Quadrupole Magnet Length Integrated Quadrupole Gradient EMQ 7 3.0 cm T Physics Requirements – October 20, 2005 4 Internal LCLS Undulator Alignment and Motion Review mm mm T degrees m Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Undulator Segment Prototype Physics Requirements – October 20, 2005 5 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Short Break Section Components Beam Finder Wire RF Cavity BPM Undulator Segment Quadrupole Physics Requirements – October 20, 2005 6 Internal LCLS Undulator Alignment and Motion Review Cherenkov Detector Undulator Segment Heinz-Dieter Nuhn, SLAC / LCLS Courtesy of Dean Walters Nuhn@slac.stanford.edu Long Break Section Components Beam Finder Wire Diagnostics Tank RF Cavity BPM Undulator Segment Quadrupole Physics Requirements – October 20, 2005 7 Internal LCLS Undulator Alignment and Motion Review Cherenkov Detector Undulator Segment Heinz-Dieter Nuhn, SLAC / LCLS Courtesy of Dean Walters Nuhn@slac.stanford.edu Requirement Documents Doc Type Number Title GRD 1.1-001 Global Requirement Document http://ssrl.slac.stanford.edu/lcls/prd/1.1-001-r1.pdf PRD 1.1-002 LCLS Start-Up Test Plan http://ssrl.slac.stanford.edu/lcls/prd/1.1-002-r0.pdf PRD 1.1-003 Conventional Alignment System Requirements http://ssrl.slac.stanford.edu/lcls/prd/1.1-003-r1.pdf PRD 1.4-001 General Undulator System Requirements http://ssrl.slac.stanford.edu/lcls/prd/1.4-001-r3.pdf PRD 1.4-002 Magnetic Measurement Facility Requirements http://ssrl.slac.stanford.edu/lcls/prd/1.4-002-r0.pdf PRD 1.4-003 Undulator Beam Based Alignment System Requirements http://ssrl.slac.stanford.edu/lcls/prd/1.4-003-r2.pdf PRD 1.4-004 Undulator Beam Finder Wire http://ssrl.slac.stanford.edu/lcls/prd/1.4-004-r0.pdf ESD 1.4-104 Wire Position Monitor System Specifications ESD 1.4-105 Hydrostatic Leveling System Specifications http://ssrl.slac.stanford.edu/lcls/prd/1.4-105-r0.pdf Heinz-Dieter Nuhn, SLAC / LCLS Physics Requirements – October 20, 2005 8 Nuhn@slac.stanford.edu Internal LCLS Undulator Alignment and Motion Review LCLS Undulator Tolerance Budget Analysis Based On Time Dependent SASE Simulations in 2 Phases Simulation Code: Genesis 1.3 Simulate Individual Error Sources Combine Results into Error Budget Physics Requirements – October 20, 2005 9 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Parameters for Tolerance Study The following 8 errors are considered: Beta-Function Mismatch, Launch Position Error, Module Detuning, Module Offset in x, Module Offset in y, Quadrupole Gradient Error, Transverse Quadrupole Offset, Break Length Error. The ‘observed’ parameter is the average of the FEL power at 90 m (around saturation) and 130 m (undulator exit) Physics Requirements – October 20, 2005 10 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I - Individual Study Time-dependent runs with increasing error source (uniform distribution) and different error seeds. Gauss fit to obtain rms-dependence. 2 Pi P0 e xi 2 i2 Pi P0 e i i x 2 1 2 2 Detailed Analysis Description Physics Requirements – October 20, 2005 11 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I – Error 1b: Optics Mismatch Simulation and fit results of Optics Mismatch analysis. The larger amplitude data occur at the 114-mpoint, the smaller amplitude data at the 80-m-point. 1 xi 2 0 2 0 0 Transformation from negative exponential to Gaussian: 1 x2 m2 2 2 m2 / 2 Optics Mismatch (Gauss Fit) Physics Requirements – October 20, 2005 12 Internal LCLS Undulator Alignment and Motion Review Location Fit rms 080 m 0.58 114 m 0.71 Average 0.64 z < 1.41 Unit Heinz-Dieter Nuhn, SLAC / LCLS Z. Huang Simulations Nuhn@slac.stanford.edu Comparison of z vs. /0 1 0 2 0 0 2 + - 1- value Physics Requirements – October 20, 2005 13 Internal LCLS Undulator Alignment and Motion Review Simplifies at waist location: 0 0 1 0 2 0 or, resolved for 2 z z 1 0 Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I – Error 2: Transverse Beam Offset Simulation and fit results of Transverse Beam Offset (Launch Error) analysis. The larger amplitude data occur at the 130-m-point, the smaller amplitude data at the 90-mpoint. xi Horiz. Launch Position Physics Requirements – October 20, 2005 14 Internal LCLS Undulator Alignment and Motion Review Transverse Beam Offset (Gauss Fit) / 2 Location Fit rms Unit 090 m 25.1 µm 130 m 21.1 µm Average 23.1 µm Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I – Error 3: Module Detuning Simulation and fit results of Module Detuning analysis. The larger amplitude data occur at the 130-mpoint, the smaller amplitude data at the 90-m-point. xi K / K Module Detuning (Gauss Fit) Physics Requirements – October 20, 2005 15 Internal LCLS Undulator Alignment and Motion Review Location Fit rms Unit 090 m 0.042 % 130 m 0.060 % Average 0.051 % Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I – Error 4: Horizontal Module Offset Simulation and fit results of Horizontal Module Offset analysis. The larger amplitude data occur at the 130-mpoint, the smaller amplitude data at the 90-m-point. Horizontal Model Offset (Gauss Fit) Physics Requirements – October 20, 2005 16 Internal LCLS Undulator Alignment and Motion Review Location Fit rms Unit 090 m 0782 µm 130 m 1121 µm Average 0952 µm Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I – Error 5: Vertical Module Offset Simulation and fit results of Vertical Module Offset analysis. The larger amplitude data occur at the 130-mpoint, the smaller amplitude data at the 90-m-point. Vertical Model Offset (Gauss Fit) Physics Requirements – October 20, 2005 17 Internal LCLS Undulator Alignment and Motion Review Location Fit rms Unit 090 m 268 µm 130 m 268 µm Average 268 µm Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I – Error 6: Quad Field Variation Simulation and fit results of Quad Field Variation analysis. The larger amplitude data occur at the 130-mpoint, the smaller amplitude data at the 90-m-point. Quad Field Variation (Gauss Fit) Physics Requirements – October 20, 2005 18 Internal LCLS Undulator Alignment and Motion Review Location Fit rms Unit 090 m 8.7 % 130 m 8.8 % Average 8.7 % Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I – Error 7: Transverse Quad Offset Error Simulation and fit results of Transverse Quad Offset Error analysis. The larger amplitude data occur at the 130-m-point, the smaller amplitude data at the 90-m-point. Transverse Quad Offset Error (Gauss Fit) Physics Requirements – October 20, 2005 19 Internal LCLS Undulator Alignment and Motion Review Location Fit rms Unit 090 m 4.1 µm 130 m 4.7 µm Average 4.4 µm Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step I – Error 8: Break Length Error Simulation and fit results of Break Length Error analysis. The larger amplitude data occur at the 130-mpoint, the smaller amplitude data at the 90-m-point. Break Length Error (Gauss Fit) Physics Requirements – October 20, 2005 20 Internal LCLS Undulator Alignment and Motion Review Location Fit rms Unit 090 m 13.9 mm 130 m 20.3 mm Average 17.1 mm Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step II - Tolerance Budget Assuming that each error is independent on each other (validity of this assumption is limited) tolerance Each should yield the same degradation fitted rms xi2 1 1 n 2 fi 2 fi 2 f2 P e 2 i e 2 e 2 e 2 P0 fi=xi/i unit weights n=8 Tolerance is defined for a given power degradation 2 P0 f ln n P Physics Requirements – October 20, 2005 21 Internal LCLS Undulator Alignment and Motion Review 1 - P/P0 f 20 % 0.236 25 % 0.268 Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step III - Correlated Error Sources For the simplest approach, the tolerance budget assumes uncorrelated errors of 8 different sources. Some tolerances (e.g. the break length error) are very relaxed and can be reduced to relax other tolerances, i.e. use individual tolerances. 1 fi 2 P e 2 P0 Next step is to combine all error sources in the simulation. Include BBA and other correction scheme in the runs Physics Requirements – October 20, 2005 22 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Step II - Tolerance Budget (cont’) Error Source < i> < i> f < i > fi fi f=0.268 (25% red.) (24.2% red.) Units z < 1.1 Hor/Ver Optics Mismatch (z-1)0.5 0.64 0.19 0.453 0.32 Hor/Ver Transverse Beam Offset 23 5.7 0.177 3.7 µm 0.051 0.016 0.402 0.024 % Module Offset in x 952 301 0.125 140 µm Module Offset in y 268 72 0.298 80 µm Quadrupole Gradient Error 8.7 2.3 0.028 0.25 % Transverse Quadrupole Offset 4.4 1.3 0.215 1.0 µm Break Length Error 17.1 5.4 0.048 1.0 mm Module Detuning K/K Physics Requirements – October 20, 2005 23 Internal LCLS Undulator Alignment and Motion Review Can be mitigated through steering. Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Model Detuning Sub-Budget K K MMF K T K x K 2 K pi i pi Typical Value rms dev. pi 3.5 0.0003 K -0.0019 °C-1 0.0001 °C-1 T 0 °C 0.32 °C K 0.0023 mm-1 0.00004 mm-1 x 1.5 mm 0.05 mm Parameter pi KMMF K 2 Note ±0.015 % uniform Thermal Coefficient ±0.56 °C uniform without compensation Canting Coefficient Horizontal Positioning KMMF T K KT x K Kx 2 2 2 2 2 K / K 0.020% Physics Requirements – October 20, 2005 24 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Undulator Pole Canting • Canting comes from wedged spacers • 4.5 mrad cant angle • Gap can be adjusted by lateral displacement of wedges • 1 mm shift means 4.5 microns in gap, or 8.2 Gauss • Beff adjusted to desired value Physics Requirements – October 20, 2005 25 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Using Undulator Roll-Away and K Adjustment Function Standard Undulator Segment Axis (SUSA) as defined during tuning process. SUSA SUSA defines Girder Axis (GA) in neutral Segment position. SUSA moves with Segment, GA does not. GA Neutral; K=3.5000; x=+0.0 mm PowerTp; K=3.4804; x=+8.5 mm Both axes refer to undulator fiducials. SUSA GA is the basic reference line for the relative alignment of Beamline components. GA SpontTp; K=3.4929; x=+3.0 mm Physics Requirements – October 20, 2005 26 Internal LCLS Undulator Alignment and Motion Review RollAway; K=0.0000; x=+100 mm Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Segment K Adjustments for Overall Tapering The following list contains the nominal K values for the 33 undulator segments for the 6.8 mm gap height: Undulator Segment Keff 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 3.5000 3.4998 3.4996 3.4993 3.4991 3.4989 3.4987 3.4984 3.4982 3.4980 3.4978 3.4976 3.4973 3.4971 3.4969 3.4967 3.4964 3.4962 3.4960 3.4958 3.4955 3.4953 3.4951 3.4949 3.4947 3.4944 3.4942 3.4940 3.4938 3.4935 3.4933 3.4931 3.4929 Physics Requirements – October 20, 2005 27 Internal LCLS Undulator Alignment and Motion Review To compensate energy loss from spontaneous radiation This amount of tapering requires only a negligible adjustment for break lengths. After achieving goal performance, tapering beyond saturation point is desirable. (up to 0.6% total) Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Measurement of SASE Gain Using Rollout Undulator Segments can be removed by remote control from the end of the undulator. They will not effect radiation produced by earlier segments. Physics Requirements – October 20, 2005 28 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Root Requirements for FEL Gain Effective K Value Tolerance The effective K value for each undulator along the electron path shall not deviate by more that ±0.024 % from its design value. Undulator Tuning Temperature Control Undulator Segment Alignment Pole Canting with Horizontal Position Control Phase Tolerance The average longitudinal electron bunch position shall not deviate by more that ±10 degrees of x-ray phase (±4 pm) from its design value over the distance of one gain length. Trajectory Control (Tight Control and Stability of Quadrupole Centers) Overlap Tolerance The rms deviation between the transverse center of the electron beam and the center of the radiation field shall be less than 10% of the rms of the electron beam distribution. Control and Stabilization of Launch Coordinates Trajectory Control Physics Requirements – October 20, 2005 29 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Implication from Phase Tolerance Tight Phase Tolerance Requires Extremely straight trajectory (~3 µm rms over 10 m) Precise positioning of quadrupoles (±2 µm wrt. straight line) Use of Beam Based Alignment (BBA) methods Basic Conventional Alignment and Motion Strategy Alignment of components as needed to start BBA Monitoring of component motion during and between BBA procedures. The latter is to mitigate effects of ground motion and to lengthen time needed between BBA procedures. Physics Requirements – October 20, 2005 30 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Main Alignment Monitoring Elements Hydrostatic Leveling System Device (HLS) Monitored Degrees of Freedom: y, pitch, and roll Wire Position Monitoring Device (WPM) Monitored Degrees of Freedom: x, yaw, and roll Temperature Sensors BPMs (Transverse Locations Tracked by HLS and WPM) Physics Requirements – October 20, 2005 31 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Main Alignment Control Elements Relative alignment between undulator segments and break section components will be achieved and maintained through common-girder mounting Overall alignment are (remotely) controlled through Girder movement based on cam-shaft technology During initial alignment For quadrupole position control, i.e. beam steering during BBA For compensation of ground motion effects etc. Quadrupoles are used as beam steering elements Main steering function comes from off-center dipole fields. Change is done through cam-based girder motion, which will align all girder components to the beam. Dipole trim-windings are used for fine adjustments Physics Requirements – October 20, 2005 32 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Girder Components Summary Main girder components include Beam Finder Wire Undulator strongback arrangement mounted on horizontal slides Vacuum chamber support BPM Quadrupole WPM sensors HLS sensors (diagnostics components) The undulator strongback arrangement (Segment) is mountable on and removable from the girder with the vacuum chamber in place and without compromising the alignment of the vacuum chamber Segments will be taken off the girder for magnetic measurements Segments need to be mechanically interchangeable The complete Girder assembly will be aligned on the Coordinate Measurement Machine (CMM). Physics Requirements – October 20, 2005 33 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Undulator Motion Summary Remotely Controlled Motion: Undulator: x Provides control of undulator field on beam axis. Horizontal slide stages move undulator strongback independent of Girder and vacuum chamber. Girder: x, y, pitch, yaw, roll Enables alignment of all beamline components to beam axis. transverse motion of meeting girder ends can be coupled roll motion capability is to be used to keep roll constant Additional Manual Adjustments: Rough CAM position adjustability relative to fixed support. Quadrupole, BFW, Vacuum Chamber, and BPM position adjustability to Girder. Physics Requirements – October 20, 2005 34 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Segment Alignment using Beam Finder Wire Downstream quad and upstream monitor fiducialized to undulator ends BBA facilitates alignment of downstream cradle end and straightens electron beam Use Beam Finder Wire reading to determine and correct “loose” end offset Monitoring System WPM and HLS provide real-time girder position information Info can be used as feed-back for mover system to maintain initial alignment Undulator Strongback Before any BBA performed Quad After BBA: Quad, BPM and one end of undulator aligned Girder Beam Finder Wire RF BPM After centering of Upstream Monitor: Both ends of undulator aligned Beam Physics Requirements – October 20, 2005 35 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Undulator – to – BFW Alignment Tolerance Budget Vertical [µm] Horizontal [µm] 20 10 20 30 20 10 20 30 20 15 20 20 40 20 30 30 20 50 X-Wire Positioning Repeatability - 80 Y-Wire Positioning Repeatability 30 - CAM Positioning Repeatability 4 4 Undulator Segment Roll-Away Repeatability 10 10 Alignment BFW to Undulator 55 100 Grand Total 80 140 BFW Fiducials BFW Wire to Reference Stop Reference Stop Definition Reference Stop Fiducial Undulator Fiducials Hall Probe Resolution/Positioning Needle Hall Probe Resolution Needle Center to Fiducial Fixture Fiducial to Undulator Fiducial Individual contributions are added in quadrature Physics Requirements – October 20, 2005 36 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Undulator – to – Quad Alignment Tolerance Budget Vertical [µm] Horizontal [µm] 10 20 10 25 10 20 10 25 20 20 20 15 20 20 40 20 30 30 20 50 Undulator Segment Roll-Away Repeatability 10 10 Alignment Quadrupole to Undulator 60 125 Grand Total 80 140 Quadrupole Fiducials Pulsed Wire Center Definition Wire to Wire Finder (WF) Fiducial WF Fiducial to Quadrupole Fiducial Quadrupole BBA Offset Undulator Fiducials Hall Probe Resolution/Positioning Needle Hall Probe Resolution Needle Center to Fiducial Fixture Fiducial to Undulator Fiducial Individual contributions are added in quadrature Physics Requirements – October 20, 2005 37 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Main Alignment Procedures Overview Undulator Segment Tuning and Fiducialization (Establishes SUSA) Quadrupole Fiducialization Beam Finder Wire Fiducialization Complete Component Installation and Alignment on Girder Earth Field Compensation Measurement in Tunnel Girder Installation and Pre-Alignment in Tunnel Complete Installation and Checkouts of WPM and HLS Undulator Segment Installation on Girder Girder Alignment with Portable WPM / HLS Continuous Component Position Monitoring through WPM and HLS Beam-Based Alignment Periodic Rebaselining to Correct for Ground Motion etc. Physics Requirements – October 20, 2005 38 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Conventional Alignment Tolerance Overview Tolerances for Component Alignment on Girder Value Horizontal rms alignment of quadrupole and BPM to Segment (rms) Vertical rms alignment of quadrupole and BPM to Segment (rms) Horizontal rms alignment of BFW to Segment (rms) Vertical rms alignment of BFW to Segment (rms) Tolerances for Girder Alignment in Tunnel Unit 125 µm 60 µm 100 µm 55 µm Value Unit Initial rms uncorrelated x/y quadrupole alignment tolerance wrt straight line 100 µm Initial rms correlated x/y quadrupole alignment tolerance wrt straight line 300 µm Longitudinal Girder alignment tolerance ±1 mm Undulator Segment yaw tolerance (rms) 240 µrad Undulator Segment pitch tolerance (rms) 80 µrad 1000 µrad Value Unit Undulator Segment roll tolerance (rms) Component Monitoring and Control Tolerance Horizontal / Vertical Quadrupole and BPM Positions Physics Requirements – October 20, 2005 39 Internal LCLS Undulator Alignment and Motion Review ±2 µm Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu Conclusions The X-ray-FEL puts very tight tolerances on magnetic field quality, electron beam straightness, and Segment alignment. Alignment tolerances from electron beam straightness requirements can not be achieved with conventional alignment but require Beam Based Alignment (BBA) Procedure. Main task of conventional alignment and motion systems are SUSA determination and fiducialization Alignment of undulator segments (relative to adjacent quadrupole centers) Conventional alignment as prerequisite for BBA Provision of remotely controlled motion capability to support, alignment processes Monitoring of component positions in the presence of ground motion etc. Requirements and Specifications are available from the LCLS WEB site. The main Physics Requirements Document (PRD) outlining the requirements for the undulator system is PRD1.4-001. Physics Requirements – October 20, 2005 40 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu End of Presentation Physics Requirements – October 20, 2005 41 Internal LCLS Undulator Alignment and Motion Review Heinz-Dieter Nuhn, SLAC / LCLS Nuhn@slac.stanford.edu