Performance Evaluation and Comparison of Middle-Ware based QoS support for Real-
advertisement

Performance Evaluation and Comparison of
Middle-Ware based QoS support for RealTime/Multimedia applications versus using
Modified OS Kernels
By
Saif Raza Hasan
University of Massachusetts, Amherst, MA, USA 2001
1
Table of Contents
1. Introduction ..................................................................................................................... 3
2. System Description ......................................................................................................... 3
2.1 QLinux Features ........................................................................................................ 3
2.2 TAO / Corba Features................................................................................................ 4
3. Experimental Setup ......................................................................................................... 6
3.1 Echo / Null RPC ........................................................................................................ 6
3.2 Simple HTTP Client-Server ...................................................................................... 9
3.3 Concurrent HTTP Client-Server .............................................................................. 10
3.4 Compute Intensive HTTP Client-Server ................................................................. 10
3.5 Long File/ MPEG Download ................................................................................... 11
3.6 Video Streaming Without QoS Specification .......................................................... 13
3.7 Video Streaming With QoS Specification ............................................................... 16
3.8 Video Streaming performance in presence of another application.......................... 19
3.9 Industrial Control System Simulation ..................................................................... 20
4. Summary & Discussion of Qualitative Comparisons ................................................... 21
4.1 QLinux ..................................................................................................................... 22
4.2 TAO / CORBA ........................................................................................................ 22
References ......................................................................................................................... 24
2
1. Introduction
Most common off-the-shelf operating systems (COTS) such as Windows-NT, Linux and most
Unises are not designed to provide applications with QoS guarantees for access to system
resources such as network bandwidth or CPU time. This leads to poor performance of Real-Time
/ Multimedia applications which have deadlines that must be met in a guaranteed fashion on
these systems.
In trying to address this problem, two approaches are common. One is to modify the OS itself
and incorporate mechanisms for guaranteeing QoS and modifying applications to use these
mechanisms. The other alternative is to use a middle-ware which runs on top of the unmodified
operating and provides an API for application programmers that allows them to specify QoS
requirements, and the middleware attempts to meet those requirements.
In this project we have compare the performance and evaluated some of the trade-offs involved
in these two approaches. We have used the QLinux kernel which supports HSFQ for process and
packet scheduling as an example of a modified COTS system and the TAO ORB as the example
for a Real Time Middleware. TAO is an open-source implementation of the Corba specification
and contains optimizations and built in support for providing QoS to it’s applications.
We’ve developed various applications and performed experimental evaluation of their
performance to obtain a quantitative and qualitative comparison of the two systems.
2. System Description
The systems that we are evaluating and comparing in this project are QLinux and TAO (a Real
Time CORBA implementation). The two systems represent two alternative approaches to
providing QoS guarantees to Soft Real Time / Multimedia applications. The mechanisms and
features provided by the two systems are different and in this section describe them in detail.
2.1 QLinux Features
QLinux is a Linux kernel that can provide quality of service guarantees. QLinux, based on the
Linux 2.2.x kernel, combines some of the latest innovations in operating systems research. It
includes the following features:
Hierarchical Start Time Fair Queuing (H-SFQ) CPU scheduler
Hierarchical Start Time Fair Queuing (H-SFQ) network packet scheduler
The H-SFQ CPU scheduler enables hierarchical scheduling of applications by fairly allocating
cpu bandwidth to individual applications and application classes. The H-SFQ packet scheduler
provides rate guarantees and fair allocation of bandwidth to packets from individual flows as
well as flow aggregates (classes). The kernel also supports Lazy Receiver Processing (LRP) of
packets, however, this feature was turned off in the kernel we used for our experiments.
3
In the QLinux framework for CPU scheduling[1], the hierarchical partitioning requirements are
specified by a tree structure. Each thread in the system belongs to exactly one leaf node. Each
non-leaf node represents an aggregation of threads and hence an application class in the system.
Each node in the tree has a weight that determines the percentage of its parent node’s bandwidth
that should be allocated to it. Also, each node has a scheduler: whereas the scheduler of a leaf
node schedules all the threads that belong to the leaf node, the scheduler of an intermediate node
schedules it’s child nodes. Given such a scheduling structure, the scheduling of threads occurs
hierarchically. The weights associated with the nodes determine the proportion of the CPU
bandwidth available to the threads/application class represented by that node.
Similarly for the case of the network packet scheduler[2], it is possible to create a hierarchical
structure that represents the distribution of available network bandwidth to the various flows in
the system. This is done by attaching queues to leaf nodes in the scheduling hierarchy and
associating sockets with the respective queues.
These manipulations are all performed through special system calls made by an application
running as root. This application can be the same or different as the one requiring the QoS
guarantees.
2.2 TAO / Corba Features
TAO[5] is a freely available, open-source, and standards-compliant real-time implementation of
CORBA that provides efficient, predictable, and scalable quality of service (QoS) end-to-end.
Unlike conventional implementations of CORBA, which are inefficient, unpredictable, nonscalable, and often non-portable, TAO applies the best software practices and patterns to
automate the delivery of high-performance and real-time QoS to distributed applications.
Many types of real-time applications can benefit from the flexibility of the features provided by
the TAO ORB and its CORBA services. In general, these applications require predictable timing
characteristics and robustness since they are used in mission-critical real-time systems. Other
real-time applications require low development cost and fast time to market.
Traditionally, the barrier to viable real-time CORBA has been that many real-time challenges are
associated with end-to-end system design aspects that transcend the layering boundaries
traditionally associated with CORBA. That's why TAO integrates the network interfaces, OS I/O
subsystem, ORB, and middleware services in order to provide an end-to-end solution.
For instance, consider the CORBA Event Service[6], which simplifies application software by
supporting decoupled suppliers and consumers, asynchronous event delivery, and distributed
group communication. TAO enhances the standard CORBA Event Service to provide important
features, such as real-time event dispatching and scheduling, periodic event processing, efficient
event filtering and correlation mechanisms, and multicast protocols required by real-time
applications.
4
TAO is carefully designed using optimization principle patterns that substantially improve the
efficiency, predictability, and scalability of the following characteristics that are crucial to highperformance and real-time applications:
TAO uses active demultiplexing and perfect hashing optimizations to dispatch requests to
objects in constant, i.e., O(1), time regardless of the number of objects, IDL interface
operations, or nested POAs.
TAO's IDL compiler generate either compiled and/or interpreted stubs and skeletons,
which enables applications to make fine-grained time/space tradeoffs in the presentation
layer.
TAO's concurrency model is carefully design to minimize context switching,
synchronization, dynamic memory allocation, and data movement. In particular, TAO's
concurrency model can be configured to incur only 1 context switch, 0 memory
allocations, and 0 locks in the ``fast path'' through the ORB.
TAO uses a non-multiplexed connection model that avoids priority inversion and behaves
predictably when used with multi-rate real-time applications.
TAO's I/O subsystem is designed to minimize priority inversion interrupt overhead over
high-speed ATM networks and real-time interconnects, such as VME. It also runs very
efficiently over standard TCP/IP protocols, as well.
TAO provides all these optimizations within the standard CORBA 2.x reference model.
5
3. Experimental Setup
To evaluate the two systems, we developed and tested a set of applications for them and
performed various performance measurements. For this purpose we used a fire-walled network
of identical Linux workstations. The machines were all 300 MHz Pentium – II’s with 192MB
RAM connected to each other through a 10Mbps Ethernet link and running Redhat Linux 6.1.
Applications were client-server type and were tested in two configurations – client running on
the same host as the server and client running on another host in the network (remote client
case).
The following applications were developed for both systems - (QLinux as well as Corba) to
compare various aspects of performance of these two systems. Since the two systems support
slightly different application design frameworks, care was taken to keep the corresponding
applications on both systems comparable.
3.1 Echo / Null RPC
This application was designed to measure the response time and the corresponding over head for
a single unit of synchronous communication. In this application, the client would send a small
(usually empty string) string to the server which would then respond by sending the same string
back. The metric in this application was the response time of a single request as observed from
the client side.
In the case of the application QLinux the client and server communicate through a simple,
connection oriented (TCP) socket. The server launches a new thread whenever a client connects
to it, to service the request. The server then reads the string sent by the client from the socket and
writes it back to the socket immediately. The client sends 100 sequential requests to the server,
records the response times for each of these and then exits. As this application does not involve
and QoS specific services, it was run on a plain Linux kernel.
In the Corba based application, we used the concept of a distributed object to implement the
Echo server. The server implements the interface of the Echo object (the interface consists of a
single function that takes in a string argument and returns the same string).
The server creates an instance of the Echo object, writes it's unique identification string (IOR) to
a disk file and then waits for client requests. The client reads the Server IOR string from the disk
file to obtain a reference to the Echo object. It then performs the Echo function by means of an
RPC type mechanism. The actual sending and receiving of the data between the client and the
server takes place through the ORB (Object Request Broker) and the details of this are
completely transparent to the programmer.
For a fair evaluation, we configured the server to operate in a 'thread per request' mode. Other
modes such as reactive, 'thread per connection' or pool of threads are also available without
needing any special coding effort from the developer. Also, this application does not use any
6
QoS related features of the TAO ORB, but it does benefit from any special optimizations built
into the ORB.
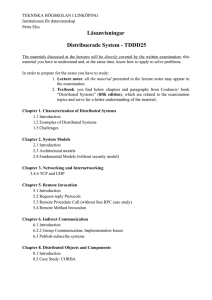
The following table indicates the average response times for the Echo application for the two
systems:
Local Client
Non Corba
Corba with
first request
Corba
without first
request
513.55 7.01
Remote Client
767.45 4.97
648.99 119.42
897.93 119.65
588.101 4.31
836.899 3.04
As can be seen from the table, on the average, the response time for the Corba based echo
application was larger than for the simple socket based ones. This is because of the extra
overhead which the middle-ware involves. An strace of the Corba application revealed that
although it too uses TCP based socket for it's communication, the marshalling, demarshalling of
arguments, extra header information that needs to be sent and the allocation and deallocation of
the paramters at the server-side was the cause of the larger response time for the CORBA
application.
Figures 1 and 2 also show that in the Corba case, the response time for the very first request
made on the remote object takes an order of magnitude time more than subsequent requests to
the same object. This difference can become significant in case the application design is such
that only one request is made per remote object (i.e. a remote object reference is never reused. In
this case, every request would experience the extra overhead of the very first request.
7
Non Corba Null RPC Response Time
Corba Null RPC Response Times
1000
8000
900
7000
800
6000
700
600
Local
Remote
4000
usecs
usecs
5000
Local
Remote
500
400
3000
300
2000
200
1000
100
Figure 1: Corba Null RPC Response Time
97
93
89
85
81
77
73
69
65
61
57
53
49
45
41
37
33
29
25
21
9
17
5
13
0
1
97
93
89
85
81
77
73
69
65
61
57
53
49
45
41
37
33
29
25
21
9
17
13
5
1
0
Figure 2: Socket Null RPC Response Times
The explanation for this can be seen from the following ‘strace’ of the client application
for the first two requests sent to the server:
gettimeofday({989986519, 979772}, NULL) = 0
brk(0x80e7000)
= 0x80e7000
socket(PF_INET, SOCK_STREAM, IPPROTO_IP) = 7
connect(7, {sin_family=AF_INET, sin_port=htons(4937),
sin_addr=inet_addr("192.168.42.3")}, 16) = 0
fcntl(7, F_GETFL)
= 0x2 (flags O_RDWR)
fcntl(7, F_SETFL, O_RDWR)
= 0
fcntl(7, F_GETFL)
= 0x2 (flags O_RDWR)
fcntl(7, F_SETFL, O_RDWR)
= 0
setsockopt(7, SOL_SOCKET, SO_SNDBUF, [65535], 4) = 0
setsockopt(7, SOL_SOCKET, SO_RCVBUF, [65535], 4) = 0
setsockopt(7, IPPROTO_TCP1, [1], 4)
= 0
getpid()
= 20221
fcntl(7, F_SETFD, FD_CLOEXEC)
= 0
getpeername(7, {sin_family=AF_INET, sin_port=htons(4937),
sin_addr=inet_addr("192.168.42.3")}, [16]) = 0
rt_sigprocmask(SIG_BLOCK, ~[RT_1], [RT_0], 8) = 0
rt_sigprocmask(SIG_SETMASK, [RT_0], NULL, 8) = 0
writev(7,
[{"GIOP\1\1\1\0F\0\0\0\0\0\0\0\0\0\0\0\1\237\0@\33\0\0\0\24"..., 82}],
1) = 82
rt_sigprocmask(SIG_BLOCK, ~[RT_1], [RT_0], 8) = 0
rt_sigprocmask(SIG_SETMASK, [RT_0], NULL, 8) = 0
select(8, [5 7], NULL, NULL, NULL)
= 1 (in [7])
read(7, "GIOP\1\1\1\1\26\0\0\0", 12)
= 12
read(7, "\0\0\0\0\0\0\0\0\0\0\0\0\6\0\0\0Hello\0", 22) = 22
gettimeofday({989986519, 987282}, NULL) = 0
fstat(1, {st_mode=S_IFREG|0640, st_size=20519, ...}) = 0
mmap(0, 4096, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_ANONYMOUS, -1, 0) =
0x40923000
write(1, "7510\n", 57510
)
= 5
gettimeofday({989986519, 988551}, NULL) = 0
writev(7,
[{"GIOP\1\1\1\0F\0\0\0\0\0\0\0\1\0\0\0\1\237\0@\33\0\0\0\24"..., 82}],
1) = 82
rt_sigprocmask(SIG_BLOCK, ~[RT_1], [RT_0], 8) = 0
rt_sigprocmask(SIG_SETMASK, [RT_0], NULL, 8) = 0
8
select(8, [5 7], NULL, NULL, NULL)
= 1 (in [7])
read(7, "GIOP\1\1\1\1\26\0\0\0", 12)
= 12
read(7, "\0\0\0\0\1\0\0\0\0\0\0\0\6\0\0\0Hello\0", 22) = 22
gettimeofday({989986519, 990551}, NULL) = 0
The code between the 2 pairs of gettimeofday system calls shows the system calls made
by the client for the first and the second requests to the same object. As can be seen, the
client creates a socket and connects to the server only after the first request is made, for
subsequent calls the connection is kept open and reused. Hence the first request involves
a greater over head. We expect a similar behavior at the server side contributing to the
patter, when requests are received, however, this could not be confirmed as strace failed
to work correctly on the server (which is a multithreaded application).
3.2 Simple HTTP Client-Server
This application models a simple HTTP server that only receives requests for static
HTML pages or objects. The client sends a properly formatted HTTP request to the
server requesting a file. In our system, the client can request one of 8 possible files
varying in size from 20kB to 1.29MB. The server receives the HTTP request, parses it,
reads the requested file from it’s local disk, includes it in an HTTP response and sends it
back to the client. For this experiment, there is only one client thread that sequentially
makes 100 requests for a file of the same size. To avoid disk-caching effects, the server
has 100 copies of files of each possible size and reads a different one every time.
The QLinux application again uses simple TCP based server that creates a new thread for
every request. The new thread services the HTTP request and also logs the time taken for
disk I/O and for processing the HTTP request. This can be used in conjunction with the
response time measured at the client to determine the time spent by the request and
response in the network.
The Corba version of the server uses a remote object with ‘thread per request’ policy to
perform the same operation as the QLinux server.
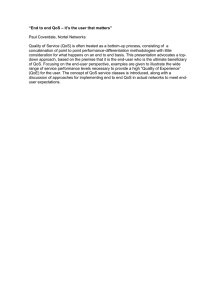
The following plots indicate that the performance of the two systems in terms of response
time are mostly comparable, though the QLinux application performs marginally better.
Local HTTP Response Times
Remote HTTP Response Time
700000
2500000
600000
2000000
500000
400000
300000
(usecs)
(usecs)
1500000
Corba
Non Corba
Corba
Non Corba
1000000
200000
500000
100000
0
0
0
0
200
400
600
800
1000
1200
1400
200
400
600
800
1000
1200
1400
File Size (kB)
Filesize (kB)
Figure 3: Local HTTP Response Times
Figure 4: Remote HTTP Response Times
9
3.3 Concurrent HTTP Client-Server
This experiment differs from the previous one in that, instead of having a single client
thread, the client launches a number of threads (1-4), each of which make 100 requests to
the same HTTP server concurrently. This forces the server to service 1-4 requests
simultaneously. In both applications, the server remains unchanged from the previous
experiment, and the clients were modified so that the client launches a certain no of
threads on startup each of which would make requests to the server. These experiments
were done for varying no. of client threads (1-4), varying file sizes (20 kB to 1.28Mb)
and with the client on a host local or remote to the server.
The figures5-8 summarize these results for the following representative cases.
No of Client Threads = 4 and varying the filesize
Filesize=640kB, varying the no. of client threads.
Local Concurrent HTTP Response Time, Filesize=640kB
600000
1000000
500000
800000
400000
Corba
Non Corba
600000
(usecs)
(usecs)
Local HTTP Response Times, Concurrency=4
1200000
Corba
Non Corba
300000
400000
200000
200000
100000
0
0
0
200
400
600
800
1000
1200
0
1400
0.5
1
1.5
2
2.5
3
3.5
4
4.5
No of concurrent clients
Filesize (kB)
Figure 6: Remote HTTP Response Times
Figure 5: Local HTTP Response Times
Remote Concurrent HTTP Response Times, Filesize=640kB
Remote HTTP Response Times,Concurrency = 4
3500000
7000000
3000000
6000000
2500000
5000000
(usecs)
Corba
Non Corba
(usecs)
2000000
4000000
Corba
Non Corba
3000000
1500000
2000000
1000000
1000000
500000
0
0
0
200
400
600
800
1000
1200
1400
File size (kB)
Figure 7: Local HTTP Response Times
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
No of concurrent clients
Figure 8: Remote HTTP Response Times
3.4 Compute Intensive HTTP Client-Server
This again is a variation on the HTTP theme. This is a simulation of cgi-bin processing
request. In this case the client sends an HTTP request to the server. In response, the
server reads a small file from disk (40kB), performs some computation (a complicated
loop) and then sends the file it read from disk to the client. The server is designed so that
the time taken for the computation constitutes most of the request processing time. In this
10
case as well the applications were created by simple modifications to HTTP client-server
described in the preceding experiments. The figures 9,10 demonstrate the variation of the
average response time for a single request as the no. of clients making concurrent
requests to the server is increased from 1 – 15. As can be seen from the figures, the
response time for these computation-intensive requests increases almost linearly as the
number of simultaneous clients is increased. The Corba application because of the extra
overheads mentioned earlier performs slightly poorer than the simple socket based one.
Also since this application does not involve transfer of large amounts data over the
network, the difference in the response times for the local client and the remote client was
not too substantial.
Remote Comp Intensive Response Time
Local Computation Response Times
1400000
1200000
1200000
1000000
1000000
800000
(usecs)
(usecs)
800000
Corba
Non Corba
600000
Corba
Non Corba
600000
400000
400000
200000
200000
0
0
0
2
4
6
8
10
12
14
16
No of Clients
Figure 9: Local HTTP Response Times, with concurrency
0
2
4
6
8
10
12
14
16
No of Clients
Figure 10: Remote HTTP Response Times, with concurrency
To simulate the computation at the server, we initially used a simple counting for-loop
which counted to a large no. However since the TAO/ORB by default uses –O3 level of
compiler optimization ( g++ compiler) , this simple loop got optmized out. So we had to
make the loop more complicated and make it manipulate more dummy variables to
prevent the compiler from optimizing it out.
3.5 Long File/ MPEG Download
One of the models for serving a video stream is to assume that the client has sufficient
buffers to accommodate the entire video file. In this model the server simply sends the
video file to the client as fast as possible and letting the client buffer it and play it back
whenever it wants. This model isn’t fundamentally different from the simple download of
a large file. Since the video file is not being streamed at a real time rate and there are no
deadlines associated with the arrival of data, the only parameter of interest is the time
taken to download the entire file (basically throughput).
In this experiment, we’ve used this model and measured the time taken to download an
MPEG-1 video file, with the server sending the video frames as fast as possible. We used
an MPEG-1 video file consisting of 5962 frames. Instead of actually using the video data,
we generated a profile of the MPEG sequence that listed the size of each frame in the
video. During initialization, the server reads this profile from disk and stores the data
about frame sizes in an array. When transmitting, the server simply sends a blank block
of data of the same size as the corresponding frame to the client. This approach
11
eliminates the disk from the service loop and allows us to measure the pure network and
application overhead of transmitting data.
In the QLinux application, the server listens for client connections on a TCP socket.
When a client connects to the server, the server spawns a new thread which starts sending
the client data equivalent to the video frame sizes as soon as possible. The stream is
preceded by a 4 byte header indicating the number of frames in the stream. Each frame in
the stream is preceded by a 4 byte header specifying the size of the following frame in
bytes. These headers are necessary so that client knows how much data to receive and
when to stop receiving the data. The client logs the arrival time of each frame when all
the data for that frame is arrived.
When using Corba, for this kind of application, the synchronous RPC mechanism of the
basic Corba server is not suitable because of the amount of data sent from the server to
the client and the manner in which it is sent. TAO includes an Audio/Video Streaming
Service[3], which supports the semantics for setting up and tearing down Streaming
connections, however, the service focuses itself in the control/signaling involved during
streaming and does not deal with the actual transport/QoS related issues. The Real-Time
Event Channel Service provided in the TAO implementation of CORBA is an ideal
choice for the kind of communication required for this application.
The Event Channel service needs to be started before either client or the server. The
server starts up and creates an instance of a video supplier object and listens for requests
from clients through an RPC call. When a client wants to receive a video file from a
server, it first launches a separate thread that connects to the Event Channel as a
consumer. Since the RTES supports filtering of events at the consumer by event types,
the consumer thread specifies to the event channel the ID of events it wishes to receive.
The consumer thread then waits for events to arrive. Meanwhile the other client thread
obtains a reference to the video supplier object and performance an RPC on it, providing
it with the event ID it is interested in receiving and telling the supplier to start sending the
video frames.
The supplier on receiving the RPC from the client, connects to the event channel as a
supplier of events with the ID specified by the client. The first event it sends to the client
contains the number of frames it will be sending. Next the supplier pushes events into the
Event Channel containing one frame each.
In the general case, the Event Channel can run on any host on the distributed system and
still be used as a communication channel between a supplier and consumer on any other
hosts. However to allow a fairer comparison with the QLinux application, for our
experiments, the event channel was run on the same host as the supplier.
The following plots show the frame arrival times at the consumer for the QLinux and
Corba applications. It can be seen that the performance of Corba is poorer than the
QLinux application because of the extra overhead involved in doing the data transfer via
an event channel. The difference in the two is much more for the case when the client and
12
server are on running on the same machine. The reason for this is that in the case with the
remote client, the delay incurred in the network (which is approximately the same for
both applications) is much more substantial than the overhead due to the event channel.
Remote MPEG Download
Local MPEG Download
450000000
140000000
400000000
120000000
350000000
80000000
Corba
Non Corba
60000000
Frame arrival times (usec)
Frame arrival times (usecs)
100000000
300000000
250000000
Corba
NonCorba
200000000
150000000
40000000
100000000
20000000
50000000
5911
5714
5517
5320
5123
4926
4729
4532
4335
4138
3941
3744
3547
3350
3153
2956
2759
2562
2365
2168
1971
1774
1577
986
1380
789
592
1183
1
395
5941
5743
5545
5347
5149
4951
4753
4555
4357
4159
3961
3763
3565
3367
3169
2971
2773
2575
2377
2179
1981
1783
991
1585
1387
793
1189
1
595
397
199
Figure 11: Frame Arrival Times, Local Download
198
0
0
Figure 12: Frame Arrival Times, Remote Download
To estimate the overhead of the event channel, we measured transmission delays for 1000
byte data blocks through direct socket transfers vs through an event channel. In the case
of supplier and receiver on the same machine, we get the following numbers:
Corba (via Event Channel) - 3134.22 17.10 usecs
Socket based direct - 1279.32 203.33 usecs
These numbers clearly indicate the extra overhead that the Event Channel adds to the data
transmission.
3.6 Video Streaming Without QoS Specification
This experiment is a baseline evaluation of the performance of the two systems for
streaming a video sequence at a Real-Time rate. The application are mostly similar to the
case of the long MPEG download, except that instead of transmitting all frames as soon
as possible, the server transmits frames in rounds of 30 frames every second. Since the
video sequence is a 30fps one, this transmission corresponds to the frame rate. Although
both systems allow specification of QoS parameters (in different ways), these were not
enabled for this set of experiments. We experimented by increasing the number of
concurrent streams till the server was unable to meet the frame rate.
In the QLinux application apart from the rate at which the server sends the frames, there
were no other changes to the application from the previous experiment .
The Corba Real Time Event Service also needs the TAO Scheduling Service to be
running for it to work. Also the supplier and consumer need to locate the Event Channel
to be able to connect to it. In the previous experiments, this was done by using each
service’s unique string which can be used to locate it (the IOR). However in a real-life
Corba based distributed system, the system runs a “Naming Service” (similar to a DNS
kind of look up). Each CORBA object (i.e. service providing entity) registers itself with
13
the Naming Service and which binds a name to it. Since the Naming Service runs in a
well-known location, a client wishing to access a particular object can perform a lookup
with the naming service and get a reference to the object.
So for this and subsequent applications, we ran a Naming Service on the server machine.
Then the Scheduling Service is launched which registers itself as “SchedulingService”.
Then the Event Channel Service launches itself, try to locate the Scheduling Service by
doing a lookup on the Naming Service for “SchedulingService” and on success register
itself as “EventService”. Once this is done, the Supplier and the Consumer can connect to
the event channel by first locating it by doing a lookup for “EventService”. This means
that server machine is running at least 4 Corba applications at any time (Naming Service,
Scheduling Service, Event Service & the Supplier). Since these are large applications,
they do put a significant load on the CPU.
Another important difference between this application and the MPEG download is that
the supplier instead of pushing a single event for each frame to be transmitted, creates an
event set consisting of 30 events corresponding to the 30 frames of that round, and pushes
the whole event set at once. It is worth noting that although the application framework
allows for a consumer to receive multiple events (an event set) at a time, we found that
even though we were pushing an event set of 30 events at supplier end, the consumer was
still getting one event at a time.
We also ran these applications for the case of multiple concurrent streams being served to
different clients through the same event channel. As described earlier, the event channel
has support for filtering event delivery to consumers.
Since the supplier is run in ‘thread per request’ mode, a new supplier thread is created for
each client that wants to receive a video. These supplier threads connect to the same
event channel and push events into it separately. Since each client (consumer) provides
the supplier with a different event ID, the events being pushed into the channel by the
various supplier threads are tagged with their respective Ids and are filtered by the event
channel so that each consumer only gets the events belonging to its own stream.
The event channel uses a pool of threads to do the dispatching of the events and the size
of the pool can be configured when the Event Service is started. For our experiments, we
set the number of threads to be the same as the no of concurrent clients we would be
using for each experiment.
The Metric: For comparing the performance of the two applications we used a metric
based on the time taken to receive a round. When transmitting a stream, the server sends
a round of 30 frames every second. If it completes transmitting the round before it’s time
to send the next round, the sending thread sleeps for that duration. If, however, it is
unable to send a round in one second, it starts sending the next round as soon it finishes
with the current one. The client, who is logging the frame arrival time of each frame, is
interested in receiving a complete round (30 frames) every second to be able to play the
video stream continuously. Therefore, at the client side we measure the amount of time
14
taken to receive an entire round. This is the time from the arrival of the first frame to the
arrival of the arrival of the last (30th) frame of the round. If this time is less that 1 second,
then we can say that this round was received in-time for playback. If the time is greater
than one second, this corresponds to a missed deadline. One of the effects that this metric
does not measure is that if one of the earlier rounds is delayed and misses its deadline, it
is likely going to make the subsequent rounds also miss their deadlines. By using the time
to receive each frame separately, we factor out the cumulative effect of deadline misses.
Therefore the two metrics we are interested in are:
1. Average Round Duration (as measured from Client) with a increasing number of
Streams
2. Distribution of Round Duration (around deadline) and effect of increasing number
of Streams
Local Streaming No QoS
Remote Streaming No QoS
70000
1200000
1000000
50000
40000
Corba
Non Corba
30000
20000
Average Round duration (usecs)
Average Round Duration (usecs)
60000
800000
Corba
Non Corba
600000
400000
200000
10000
0
0
0
1
2
3
4
5
6
No of Streams
Figure 13: Average Round Durations, Local Client, No QoS
0
1
2
3
4
5
6
No of streams
Figure 14: Average Round Durations, Remote Client No QoS
As can be seen from figure 12, when the client and server are running on the same host,
the QLinux application not only outperforms the Corba application, but also is not
affected significantly by increasing the number of simultaneous streams. The reason for
this is that for the local streaming, the overhead due to the network is minimal, but since
the QLinux applications are simpler and less memory and CPU intensive, they are not
affected as much as Corba applications when a large no. are running on the same system.
However in figure 13, for the remote client, the performance of the two systems is almost
comparable. Both applications are unable to meet the frame rate (corresponding to an
average round duration of 1 second) for 5 concurrent streams.
The following figures 15,16,17,18 show the distribution of Round Durations for the
remote client and the cases of 4 and 5 concurrent streams.
We also experimented by changing the round size from 30 frames to 15 frames. In this
case the server is required to send rounds of 15 frames every 500 msecs. We found that
because of the tighter deadline and possibly the 10msec granularity of the Linux kernel
clock, the server was unable to support even 4 concurrent streams for remote clients. The
round durations for these cases are shown in figures 19 and 20
15
Corba Remote 5, No QoS
0.16
0.16
0.14
0.14
0.12
0.12
0.1
Frequency
Round Duration
More
1400000
1300000
1200000
1100000
900000
1000000
800000
700000
600000
500000
400000
0
More
1400000
1300000
1200000
1100000
900000
1000000
800000
700000
600000
500000
0
400000
0.02
0
300000
0.04
0.02
200000
0.06
0.04
0
0.06
300000
0.08
200000
Frequency
0.08
100000
0.1
Fraction
0.18
100000
Fraction
Corba Remote 4, No QoS
0.18
Round Durations
Figure 15: Corba Round Durations 4 Streams
Figure 16: Corba Round Durations 5 Streams
Non Corba Remote 4, No QoS
Non Corba Remote 5, No QoS
0.2
0.14
0.18
0.12
0.16
0.1
0.14
0.1
Frequency
Fraction
Fraction
0.12
0.08
Frequency
0.06
0.08
0.06
0.04
0.04
0.02
0.02
Round Durations
More
1400000
1300000
1200000
1100000
1000000
900000
800000
700000
600000
500000
400000
300000
200000
0
100000
More
1400000
1300000
1200000
1100000
1000000
900000
800000
700000
600000
500000
400000
300000
200000
0
0
100000
0
Round Durations
Figure 17: Non Corba Round Durations 4 Streams
Figure 18: Non Corba Round Durations 5 Streams
RoundSize=15 Corba Remote No QoS
RoundSize=15 Non Corba Remote No QoS
0.16
0.2
0.18
0.14
0.16
0.12
0.14
0.12
0.08
Frequency
Fraction
Fraction
0.1
0.1
Frequency
0.08
0.06
0.06
0.04
0.04
0.02
0.02
Round Durations
Figure 19: Corba Round Durations 4 Streams,
Round size=15 frames
More
700000
650000
600000
550000
500000
450000
400000
350000
300000
250000
200000
150000
100000
0
50000
More
700000
650000
600000
550000
500000
450000
400000
350000
300000
250000
200000
150000
100000
0
0
50000
0
Round Durations
Figure 20: Non Corba Round Durations 4 Streams,
Round size=15 frames
3.7 Video Streaming With QoS Specification
After testing the raw performance of streaming applications on both systems features, we
repeated the experiments of the previous sections, this time with the QoS features
enabled. This also involved modifying the application to specify the QoS guarantees it
needs from the system.
16
In the case of the QLinux application, the server modifies the process scheduling
hierarchy to create an SFQ scheduling class with weight 1. A default best effort class
with weight 1 is automatically created when the kernel is booted. For each thread that the
server creates to send a stream, it creates a new leaf node with weight 1 in the SFQ class
and attaches the service thread to that node. Thus, in the server application, the thread
that listens for client connections, runs in the best effort class and the threads responsible
for streaming the video run in the SFQ class, all with the same weight.
Similarly, the server also creates an SFQ class in the packet scheduling hierarchy and
attaches the new socket created for a client connection to a newly created queue with
weight 1 in the SFQ class.
The mechanism for providing QoS specification is much simpler and more intuitive in
the case of TAO. All the server program needs to do is to associate the following QoS
parameters with the a certain type of event when connecting to an Event Channel as a
supplier (or consumer):
Worst Case Time (to perform task): set to 1 sec
Typical Time (to perform task): set to 1 sec
Cached Time: set to 1 sec
Time Period of task: set to 1 sec
No of threads (of event channel to use for this task): set to 1
The Real Time Event Service uses these parameters to get a schedule from the
Scheduling Service and schedules the Event Channel’s pool of threads using that
schedule.
The following figures show the variation in the Average Round Duration as the number
of concurrent clients increases. This is for the round size of 30 frames with a 1 second
period.
Remote Streaming with QoS
1200000
50000
1000000
40000
800000
Corba
No Corba
30000
Avg Round Durations
Avg Round Durations
Local Streaming with QoS
60000
20000
400000
10000
200000
0
Corba
Non Corba
600000
0
0
1
2
3
4
5
6
No of Streams
Figure 21: Average Round Durations, Local Client with QoS
0
1
2
3
4
5
6
No of Streams
Figure 22: Average Round Duration Remote Client with QoS
As can be seen from the above figures, the relative behavior of the two applications in
terms of the average Round Duration does not change too much from the case when the
QoS was not enabled. For local performance, QLinux still out-performs CORBA and in
the case of remote client, although CORBA does better when the number of clients is
low, the QLinux application scales better.
17
The following plots show the distributions of the Round Durations for these applications
with 4 and 5 remote clients. It can be seen that QLinux with QoS enabled does manage to
shorten the tail of the distribution noticeably, thus ensuring that a greater percentage of
rounds are able to arrive within the deadline.
Corba Remote 4 with QoS
Corba Remote 5 with QoS
0.18
0.2
0.16
0.18
0.16
0.14
0.14
0.12
Frequency
Fraction
Fractions
0.12
0.1
0.08
0.1
Frequency
0.08
0.06
0.06
0.04
Round Durations
More
1400000
1300000
1200000
1100000
900000
1000000
800000
Round Durations
Figure 23: Corba RoundDurations,4 Streams with QoS
Figure 24: Corba RoundDurations,5 Streams with QoS
Non Corba Remote 4 with QoS
Non Corba Remote 5 with QoS
0.2
0.2
0.18
0.18
0.16
0.16
0.14
0.14
0.12
0.1
Round Durations
Figure 25: Non Corba RoundDurations,4 Streams with QoS
More
1400000
1300000
1200000
1100000
1000000
900000
800000
700000
600000
500000
400000
300000
Frequency
0
More
1400000
1300000
1200000
1100000
1000000
900000
800000
700000
600000
0
500000
0.02
0
400000
0.04
0.02
300000
0.06
0.04
200000
0.06
0
0.08
100000
0.08
200000
Frequency
100000
0.1
Fraction
0.12
Fraction
700000
600000
500000
400000
300000
200000
0
More
1400000
1300000
1200000
1100000
900000
1000000
800000
700000
600000
500000
400000
300000
200000
0
0
100000
0.02
0
100000
0.04
0.02
Round Durations
Figure 26: Non Corba RoundDurations,5 Streams with QoS
We also observed the effect of decreasing the round size to 15 frames transmitted every
500 msecs for 4 concurrent remote clients. Again we see that with QoS, the QLinux
application does a better job of ensuring that a greater number rounds are received within
their deadlines. The improvement from the case without QoS is also more noticeable with
QLinux.
18
RoundSize=15 Non Corba Remote QoS
0.18
0.16
0.16
0.14
0.14
0.12
0.12
0.1
Frequency
0.08
Fraction
0.1
Frequency
0.08
0.06
0.06
0.04
0.04
0.02
0.02
0
Figure 27: Corba Round Durations 4 Streams,
Round size=15 frames
More
700000
650000
600000
550000
500000
450000
400000
350000
300000
250000
200000
150000
100000
0
More
700000
650000
600000
550000
500000
450000
400000
350000
300000
250000
200000
150000
100000
0
50000
0
Round Duration
50000
Fractions
RoundSize=15 Corba Remote QoS
0.18
Round Duration
Figure 28: Non Corba Round Durations 4 Streams,
Round size=15 frames
3.8 Video Streaming performance in presence of another application
In this experiment, we’ve attempted to measure how the performance of a time critical
application is affected by the presence of another non-time critical application. This was
done by running the Streaming Server and the HTTP server on the same host. 4 streaming
clients and a certain number of HTTP clients make concurrent requests to their respective
servers. We observe the effect of increasing the number of HTTP clients on the Average
Round Duration measured by the streaming clients.
The results of some preliminary experiments are presented below in figures 29 and 30
19
Application Mix, 4 Streams + HTTP, with QoS
1400000
1200000
1200000
1000000
1000000
800000
Corba
Non Corba
600000
Avg Round Durations
Avg Round Durations
Application Mix, 4 Streams + HTTP No QoS
1400000
800000
Corba
Non Corba
600000
400000
400000
200000
200000
0
0
0
2
4
6
8
10
12
No of HTTP Clients
Figure 29: Average Round Durations, 4 Client
No QoS, increasing no of HTTP Clients
0
2
4
6
8
10
12
No of HTTP Clients
Figure 30: Average Round Durations, 4 Client
with QoS, increasing no of HTTP Clients
The experiments involving these applications are being continued by others and will be
included in a later document.
3.9 Industrial Control System Simulation
This application simulates an industrial control console system[4]. The application
consists of 2 distinct components. The first one models a supervisor’s command console
in which a client program from time to time issues a command to a remote actuator
device (simulated by a remote server). The device performs the operation requested by
the client (simulated by a brief busy-wait) and then sends an acknowledgement back to
the client. The operator is simulated by automatically generated requests at random time
intervals (100 – 300 msecs).
The second component is a remote-sensing kind of application, in which a sensor
(simulated by a supplier) periodically (every 20 msecs) sends an update of a
measurement to a remote monitoring system (simulated by a consumer).
The QLinux version of this application consists of two client-server pairs, one for the
Command Console and the other for the remote sensor. Both applications are nonconcurrent and use a TCP based socket for communication. In the command control
application, the server on receiving a connection waits for the client to send an operation
on the open socket, performs a brief busy wait and sends back a single byte
acknowledgement. The client issues commands at random time intervals and records the
response time for requests. In the remote-sensing application, the server on getting a
connection periodically sends a byte of data to the client, which measures the arrival
times of these updates.
For TAO, the Command Console application uses the RPC-like mechanism to send a
request and receive a response. The remote-sensing application uses the Real Time event
channel for communication between the sensor and the monitoring system.
20
The metrics of interest in this application are the jitter in the arrival of sensor updates and
the response times for the Command-Console requests.
These experiments were only performed for the remote client and QoS was enabled for
Remote Sensing Application.
The average response times for the Command-Console application requests are
summarized below:
Response Time (usecs)
CORBA
QLinux
Remote Sensor NOT Running
67974.33 96.09
67617.63 12.97
Remote Sensor Running
70960.69 443.86
67853.9 11.53
As can be seen from the above table, the performance of the Command-Console
application in the absence of the Remote-Sensing application for both QLinux and
CORBA is comparable, however the degradation in performance when the Remote
Sensing Application is added to the server load, is more significant in the case of
CORBA than QLinux because of the extra overhead associated with CORBA
applications.
In the case of the Remote Sensing applications, we measure the Update sending times at
the sender and the Update receiving time at the client. The differences between
successive update sending times gives an indication of how well the threads of the
sending application are scheduled. Ideally these differences should be constant. These
experiments were performed with the Command-Console application also running
simultaneously on the same hosts.
The differences between update arrival times at the client also incorporate the jitter
introduced by the communication medium between the two applications. These
measurements are summarized in the following table:
Avg. Update Differences
(usecs)
Sending Side
CORBA
QLinux
29996.37 9.21
29997.65 4.63
Receiving Side
29992.54 7.80
29997.63 5.70
As can be seen, there is really not much to choose between the performance of the two
systems. They both manage to give an almost identical level of performance.
4. Summary & Discussion of Qualitative Comparisons
One of the objectives of this work was to provide, apart from the quantitative comparison
of the two systems presented above, also give a qualitative evaluation of the relative ease
of use of the two systems and identify any potential stumbling blocks.
21
In our experience with developing corresponding applications for both QLinux and TAO,
we observed the following pros and cons of the two systems.
4.1 QLinux
One of the biggest advantages that QLinux offers it’s users is the ability to use the same,
API which most systems programmers are already familiar with (basic socket based
programming). Using the additional QoS features available, does not add significantly to
the application complexity. This makes the task of porting already existing applications
to use these features reasonably straightforward. The developer has to learn only a few
new system calls, however, the documentation (man pages), for these leaves some room
for improvement. This is a significant advantage in the usability of the system.
On the other hand, in the simplicity of it’s API, lies also a slight drawback, in that it does
not provide the user with any high-level interfaces to simplify the task of developing
networked/distributed applications. Also since QLinux deals with QoS only in terms of
HSFQ scheduling parameters (i.e. bandwidth share), the task of actually specifying the
QoS for a given applications is not straightforward. This specially so since it is common
to describe QoS parameters in terms of deadlines, end-end delays and periodicity which
do not fit directly into the QLinux framework.
The other noticeable drawbacks of the QLinux API is that it requires that all QoS related
system calls have to be executed in super-user mode. Thus making large scale in a simple
way impractical. A solution to this problem would be to develop run-time services which
run as the super-user and provide an interface for other user’s applications to request QoS
for themselves. It would also be possible to do some admission control in this way. Also,
the error reporting mechanisms for the system calls for CPU HSFQ and Link HSFQ are
neither consistent nor convenient. Link HSFQ system calls use system messages to report
erroneous or exceptional conditions which makes it hard to write clean and robust
applications.
4.2 TAO / CORBA
Since TAO is first a Distributed Object Computing (DOC) middle-ware and then a RealTime system, it suffers from the problem of being a large, complicated and a very
general-purpose application development framework. This implies that any person
wishing to use TAO for a Real-Time application has to first overcome the significant
hurdle of understanding the various concepts related to DOC and the large amount of
details associated with a specific DOC system (such as CORBA). For small, simple
applications, this overhead can be prohibitive.
Also since the use of CORBA requires the developer to follow a certain application
development framework. It makes the task of porting existing applications, which use
conventional socket based communication, to use TAO a very complicated and often
impractical task.
22
However, once this initial hurdle is overcome, the middle-ware provides many features to
make the task of developing distributed applications simpler and faster. Since the middleware frees the developer of the lower level implementation details (the socket
programming), it substantially reduces development time for simple applications because
of the time saved in writing hard to debug, error prone networking code.
This freedom, however, comes at the cost of flexibility. Thus while it is extremely easy
and quick to develop applications which conform well to the models commonly used in
DOC. Developing an application that has a unique/uncommon communication model
might involve a lot of unnecessary complications.
Building TAO and TAO based applications is surprisingly memory and CPU intensive. A
minimal build of ACE, TAO and TAO OrbServices took close to 4 hours on an otherwise
lightly loaded Pentium-II, 300 Mhz machine with 192MB RAM. It takes 5-10 minutes to
build from scratch the simplest TAO based application when a normal socket based one
takes only a few seconds.
For the purpose of specifying QoS guarantees, TAO provides a rather intuitive and easy
to understand interface which involves directly specifying deadlines, periodicity of
events, etc. Also the ORB supports various kinds of concurrency models in servers and
the services that can be used by simply providing command line parameters or
configuration files during startup.
23
References
[1] P. Goyal and X. Guo and H.M. Vin, A Hierarchical CPU Scheduler for Multimedia Operating Systems,
Proceedings of 2nd Symposium on Operating System Design and Implementation (OSDI'96), Seattle, WA,
pages 107-122, October 1996.
[2] P. Goyal and H. M. Vin and H. Cheng, Start-time Fair Queuing: A Scheduling Algorithm for Integrated
Services Packet Switching Networks, Proceedings of ACM SIGCOMM'96, pages 157-168, August 1996
[3] Sumedh Mungee, Nagarajan Surendran, Douglas C. Schmidt, The Design and Performance of a
CORBA Audio/Video Streaming Service
[4] Krithi Ramamritham, Chia Shen, Oscar Gonzalez, Shubo Sen and Shreedar Shirgurkar, Using Windows
NT for Real-Time Applications: Experimental Observations and Recommendations, Proceedings of IEEE
RTAS'98
[5] Douglas C. Schmidt, TAO Overview http://www.cs.wustl.edu/~schmidt/TAO-intro.html
[6] Douglas C. Schmidt, Using the Real Time Event Service
http://www.cs.wustl.edu/~schmidt/events_tutorial.html
24