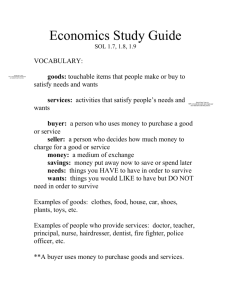
Designing an Inter-Vehicular Network Stack for Car-to-Car Communication Pravin Shankar
advertisement

Designing an Inter-Vehicular
Network Stack for
Car-to-Car Communication
Pravin Shankar
spravin@rutgers.edu
Department of Computer Science
Rutgers University
Outline
Motivation – Traffic Safety
TrafficView
Overview
of System
Data Aggregation/Validation layer
On-demand Traffic Query
Future work
Conclusion
Some facts on Traffic safety
Since 1975, vehicle safety
technology has focused on
passive devices:
*
Seat belts
Air bags
Antilock Brake System
However, the number of
reported traffic accidents in
US has remained relatively
constant
based on U.S. Traffic Safety Facts Report
*
Passive Approach is not Enough
On foggy days
What’s in
front of
that bus ?
On rainy days
What’s
behind the
bend ?
TrafficView
Uses vehicle-to-vehicle ad hoc network
Enables active accident-prevention using dissemination of
safety messages
TrafficView Overview
Infrastructure-free
approach based on carto-car communication
Each vehicle has an
embedded system
short-range wireless
communication
location information from
GPS receiver
vehicle’s data from
sensors through on-board
diagnostic system (OBD-II)
How TrafficView works?
Receive data from
remote vehicle
Local data
Broadcast data
Validate
Non-validated
dataset
Validated
dataset
Display
TrafficView Prototype
Developed in Java, ported to both Windows and
Linux
User Interface developed using OpenGL
802.11b network card
augmented
with 5dBi omni-directional antenna
Garmin eTrex GPS receiver
TIGER® road maps from U.S. Census Bureau
(publicly available)
Tested using 3 cars in real traffic conditions
TrafficView Outdoors
Too much traffic!
Vehicles transfer records:
Consider a very high-density 5-lane road
Vehicle ID (ID), position (POS), speed (SPD), broadcast time
(BT)
Distance between consecutive cars – 5m
Average size of data records – 50 bytes
Wireless transmission range of 250 m
250 vehicles compete for the same wireless medium
Total data transmitted every broadcast period = 250 MB
Beyond the capabilities of current wireless technology!
Data Aggregation
Aggregate data to see vehicles as far as
possible with “acceptable” accuracy loss
Combine
data for vehicles that are close to
each other
Perform
more aggregation as distance
increases
Data Aggregation
Having n records
{ID1 , POS1 , SPD1 , BT1}...{IDn , POS n , SPDn , BTn }
Calculate the aggregated record’s fields:
di distance of vehicle i to the current node
n
POS i
POS a
di
i 1
n
SPDi
SPDi
di
i 1
BTa min{ BT1...BTn }
POS and SPD are weighted averages.
Need for Data Validation
Out-of-date information
Vehicles move and change speed
Packets may get lost in transit
Information received from OBD* might
Solution: Data aging
Malicious nodes can corrupt data
Inject
incorrect data
Refuse to forward data
Modify data
Solution: Probabilistic validation
* On-Board Diagnostic Interface
be invalid
Push v/s Pull
Most cars are interested in information
about immediate neighboring road segment
“Push”
mechanism is sufficient
How to get information about other roads?
Broadcast is not scalable
Road
segments are extensive in size
Traffic information is dynamic in nature
There is a need for “pull” i.e. On-Demand traffic query
On-demand Traffic Query Protocol
VITP – Vehicular Information Transfer Protocol
Location-sensitive
queries and replies between nodes
of a VANET
VITP Peers – nodes that operate as
Clients
Intermediates
Servers
Agnostic
of network communication layer
Location-sensitive queries
Gas Station
QuickT
im e™an
d a
F
(LZW
de
com
areTIF
ne
eded
t )osee
t hipr
spies
cst or
r e.
u
Quick Time™a nd a
TIFF ( Unco mpre ssed ) dec ompr esso r
ar e nee ded to see this pictur e.
Quick Time™a nd a
TIFF ( Unco mpre ssed ) dec ompr esso r
ar e nee ded to see this pictur e.
Quick Time™a nd a
TIFF ( Unco mpre ssed ) dec ompr esso r
ar e nee ded to see this pictur e.
Coffee
place
QuickT
im e™an
d a
F
(LZW
de
com
areTIF
ne
eded
t )osee
t hipr
spies
cst or
r e.
u
Quick Time™a nd a
TIFF ( Unco mpre ssed ) dec ompr esso r
ar e nee ded to see this pictur e.
Traffic
Server
GSM Link
Virtual Ad-Hoc Servers (VAHS)
The server that computes
the reply is a dynamic
collection of VITP peers
that:
Q
Run on vehicles moving inside the
target-location area of Q.
Are
willing and able to participate
Gas
Station
in Q’s resolution.
QuickT
im e™an
d a
F
(LZW
de
com
areTIF
ne
eded
t )osee
t hipr
spies
cst or
r e.
u
Quick Time™a nd a
TIFF ( Unco mpre ssed ) dec ompr esso r
ar e nee ded to see this pictur e.
QuickT
im e™an
d a
F
(LZW
de
com
areTIF
ne
eded
t )osee
t hipr
spies
cst or
r e.
u
VAHS (continued)
Established on the fly in an ad-hoc manner
Identified with a query and its target-location
area.
Maintains no explicit knowledge (state)
about its constituent VITP peers
Follows a best-effort approach in serving
queries
VAHS members maintain no information
about other members of the VAHS.
VITP transactions
Dispatch-query
VAHS-computation
phase
Dispatch-Reply
phase
Reply-delivery phase
phase
Q
VAHS
Q
R
Q1
R
Intermediary nodes
R
Q2
Q3
Q4
Q5
Q7
VITP Peer
VANET node
Q6
Return Conditions (RC)
Determine at which point in time the
resolution of a VITP request can be
considered done (VAHS computation
completes).
RC decision depends upon:
Query
semantics: RC must be defined explicitly
in the query specification.
Timeout condition: either pre-set by higher-level
application semantics or default.
Other protocol features
Support for caching.
Message identifiers.
Privacy protection.
Dissemination vs. pull-based retrieval.
VITP – Message Format
METHOD <uri> VITP/<version_num>
Target: [rd_id_dest,seg_id_dest]
From: [rd_id_src,seg_id_src] with <speed>
Time: <current_time>
Expires: <expiration_time>
Cache-Control: <directive>
TTL: <time_to_live>
msgID: <unique_key>
Content-Length: <number_of_bytes>
CRLF
<message body>
VITP URI Format
/<type>/<tag>?[<rc_expr>&…]&<param_expr>&…
type: classes of physical-world entities involved
in the request (vehicle,service).
tag: actual information sought (traffic, alert, gas,
index).
Example VITP requests:
GET /vehicle/traffic?[cnt=10&tout=2000ms]&tframe=3min
GET /service/gas?[cnt=4&tout=1800ms]&price<2USD
POST /vehicle/alert?[cnt=*&tout=*]&type=slippery-road
Future work
Reliable multicast – content delivery on VANETs
Provide
support for rich multimedia on cars
Outdoor Experiments
Perform
experiments in real traffic conditions in order
to better understand VANET characteristics
Mobility emulation
Traffic modelling
Privacy Issues
Deployment on real systems
Related Work
Car Manufacturers
GM-CMU - http://gm.web.cmu.edu/
Daimler-Chrysler - http://www.rtna.daimlerchrysler.com/
MIT CarTel, Berkeley PATH, PSU CITrans, etc.
Europe
Fleetnet
Network-On-Wheels
Car 2 Car Communication Consortium - http://www.car-2-car.org/
Japan
Toyota InfoTechnology Center - http://www.toyota-itc.com/
Tokyo University, Keio University
And many more…
Thank you!
http://discolab.rutgers.edu/traffic/
Faculty
Liviu Iftode
Graduate Students
Pravin Shankar, Stephen Smaldone, Nishkam Ravi
Collaborators
Cristian Borcea, Marios Dikaiakos, Tamer Nadeem, Yanzhi Bai, Josiane Nzouonta
Work supported in part by NSF Collaborative Research: NeTS-NBD: (ANI 0520123)
grant and NSF Information Technology Research (ANI 0121416) grant. .
E-Road Vision
To use ad-hoc vehicular networking to
improve the way we drive by supporting
Collaborative
traffic information exchange
Emergency/safety message dissemination
On-demand traffic conditions monitoring
Dynamic route planning
Rich multimedia distribution