Dynamic Strategic Planning Primitive Models Risk Recognition Decision Trees
advertisement

Dynamic Strategic Planning
Primitive Models
Risk Recognition
Decision Trees
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 1 of 12
Primitive Decision Models
Still widely used
Illustrate problems with intuitive approach
Provide base for appreciating advantages of
decision analysis
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 2 of 12
Primitive Decision Models
BASIS: Payoff Matrix
Alternative
State of “nature”
S1 S2 . . . Sm
A1
A2
An
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Value of
outcomes
Onm
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 3 of 12
Primitive Model: Laplace
Decision Rule:
a) Assume each state of nature equally
probable => pm = 1/m
b) Use these probabilities to calculate an
“expected” value for each alternative
c) Maximize “expected” value
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 4 of 12
Primitive Model: Laplace (cont’d)
Example
S1
S2
“expected” value
A1
100
40
70
A2
70
80
75
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 5 of 12
Primitive Model: Laplace (cont’d)
Problem: Sensitivity to framing
==> “irrelevant alternatives
S1a
S1b
S2
“expected” value
A1
100
100
40
80
A2
70
70
80
73.3
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 6 of 12
Primitive Model: Maximin or Maximax
Decision Rule:
a) Identify minimum or maximum outcomes for each
alternative
b) Choose alternative that maximizes the global
minimum or maximum
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 7 of 12
Primitive Model: Maximin or Maximax
(cont’d)
Example:
S1
S2
S3
maximin
A1
100
40
30
A2
70
80
20
2
A3
0
0
110
3
maximax
2
Problems
- discards most information
- focuses in extremes
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 8 of 12
3
Primitive Model: Regret
Decision Rule
a) Regret = (max outcome for state i) (value for that alternative)
b) Rewrite payoff matrix in terms of
regret
c) Minimize maximum regret (minimax)
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 9 of 12
Primitive Model: Regret (cont’d)
Example:
S1
S2
S3
A1
100
40
30
0
40
80
A2
70
80
20
30
0
90
A3
0
0
110
100
80
0
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 10 of 12
Primitive Model: Regret (cont’d)
Problem: Sensitivity to Irrelevant Alternatives
A1
100
40
30
0
40
0
A2
70
80
20
30
0
10
NOTE: Reversal of evaluation if alternative dropped
Problem: Potential Intransitivities
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 11 of 12
Primitive Model: Weighted Index
Decision Rule
a)Portray each choice with its deterministic attributed
different from payoff matrix e.g.
Material
A
B
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Cost
$50
$60
Density
11
9
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 12 of 12
Primitive Model: Weighted Index (cont’d)
b) Normalize table entries on some
standard, to reduce the effect of
differences in units. This could be
a material (A or B); an average or
extreme value, etc.
e.g.
Material
Cost
Density
A
1.00
1.000
B
1.20
0.818
c) Decide according to weighted average
of normalized attributes.
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 13 of 12
Primitive Model: Weighted Index (cont’d)
Problem 1: Sensitivity to Framing
“irrelevant attributes” similar to Laplace
criterion (or any other using weights)
Problem 2: Sensitivity to Normalization
Example:
Norm on A
Matl
$
A
1.00
B
1.20
Dens
1.000
0.818
Norm on B
$
Dens
0.83
1.22
1.00
1.00
Weighting both equally, we have
A > B (2.00 vs. 2.018)
B > A (2.00 vs. 2.05)
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 14 of 12
Primitive Model: Weighted Index (cont’d)
Problem 3: Sensitivity to Irrelevant Alternatives
As above, evident when introducing a new alternative,
and thus, new normalization standards.
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 15 of 12
Organization of Lectures
INTRODUCTION
PHASE 1: Recognition of Risk and Complexity
Reality
PHASE 2: Analysis
PHASE 3: Dynamic Strategic Planning
CASE STUDIES OF DYNAMIC STRATEGIC
PLANNING: Example Applications to Different
Issues and Contexts
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 16 of 12
Outline of Introduction
The Vision
The Problem: Inflexible Planning
The Solution: Dynamic Strategic Planning
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 17 of 12
The Problem: Inflexible Planning
The Usual Error
–
–
–
Choice of a Fixed "Strategy" ; A Master Plan
"Here we are...There we'll be”
Management and Company commitment to plan -leading to resistance to change when needed
The Resulting Problem
–
–
Inflexibility and Inability to respond to actual
market conditions
Losses and Lost Opportunities
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 18 of 12
Examples Of Inflexible Planning
Nuclear Power in USA
– fix on technology
– Uneconomic Plants
– Bankrupt Companies
Electricity in South Africa (see Case Studies)
–
fix on size
–
Huge Excess Capacity
–
Large Unnecessary Costs
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 19 of 12
The Solution: Dynamic Strategic Planning (1)
3 PHASES
1. Recognition of Risk and Complexity as
Reality of Planning
2. Analysis of Situation
3. Flexible, Dynamic Planning
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 20 of 12
The Solution: Dynamic Strategic Planning (2)
PHASE 1: Recognition Of Risk And Complexity
Of Choices As The Reality Of Planning
– Risk -- the fundamental reality to be faced in
developing long-term plans
– Complexity -- leading to Wide Range of Choices,
especially hybrid choices, those which include
elements of other alternatives and allow flexible
response to events
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 21 of 12
The Solution: Dynamic Strategic Planning (3)
PHASE 2: Analysis
– Identifying Issues
Structuring
the Situation
– Decision Analysis of Choices
Decision
trees
– Determining Satisfaction of Decision-Makers,
of Customers
Utility Analysis
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 22 of 12
The Solution: Dynamic Strategic Planning (4)
PHASE 3: New Kind Of Decision-making
Flexible, Dynamic
--
– Builds INSURANCE into plans
in
the form of flexibility
– Commits ONE PERIOD AT A TIME,
to
permit adjustment to changing conditions
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 23 of 12
The Solution: Dynamic Strategic Planning (5)
Doing Dynamic Strategic Planning involves
– Looking ahead many periods, appreciating the many
scenarios with their opportunities and threats;
– Choosing Actions to create flexibility,
so you can respond to opportunities and avoid
bad situations; and
– Committing to Actions only one period at a time.
Maintaining the flexibility to adjust to conditions
as they actually develop
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 24 of 12
Chess Analogy
Dynamic strategic planning is comparable to
playing chess as a grand master.
Dynamic strategic planning compares to
regular corporate planning as grand master
chess compares to beginner play.
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 25 of 12
Outline of Phase 1 :
Recognition of Risk and Complexity Reality
Risk: Wide Range of Futures
– The forecast is "always wrong"
Complexity: Wide Range of Choices
– Number of Choices is Enormous
“Pure”
solutions only 1 or 2% of possibilities
Most
possibilities are “hybrid”, that combine
elements of “pure” solutions
“Hybrid”
choices provide most flexibility
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 26 of 12
Recognition Of Risk (1)
The usual error
– Search for correct forecast
However: the forecast is "always wrong"
– What actually happens is quite far, in practically every
case, from what is forecast
– Examples: costs, demands, revenues and production
Need to start with a distribution of possible
outcomes to any choice or decision
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 27 of 12
DOE Oil Price Forecasts
140
120
100
1990$/BARREL
ACTUAL
1982
80
1984
1986
60
1988
1992
40
20
0
1975
1980
1985
1990
1995
2000
2005
2010
Source: M. Lynch, MIT
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 28 of 12
DOE Oil Price Forecasts
120
1994$/BARREL
100
80
ACTUAL
1981 FORECAST
1984
60
1988
1992
1995
40
20
0
1975
1980
1985
1990
1995
2000
2005
2010
Source: M. Lynch, MIT
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 29 of 12
EMF6 Oil Price Forecasts
$300.00
$250.00
1994$/BARREL
$200.00
ACTUAL
AVERAGE
$150.00
IPE
HIGHEST
LOWEST
$100.00
$50.00
$0.00
1980
1985
1990
1995
2000
2005
2010
2015
2020
Source: M. Lynch, MIT
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 30 of 12
EMF6 Oil Price Forecasts (Low Forecasts)
$160.00
$140.00
1990$/BARREL
$120.00
ACTUAL
$100.00
OPECONOMICS
IPE
$80.00
GATELY
IEES-OMS
$60.00
WOIL
$40.00
$20.00
$0.00
1980
1985
1990
1995
2000
2005
2010
2015
2020
Source: M. Lynch, MIT
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 31 of 12
Forecasts of 1990 Price of Oil (IEW Survey)
120
100
1990$/BARREL
80
MEAN
60
Series2
ACTUAL
40
20
0
1980
1981
1982
1983
1984
1985
1986
1987
1988
1989
1990
1991
YEAR OF FORECAST
Source: M. Lynch, MIT
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 32 of 12
DOE Forecasts of Non-OPEC
LDC Production
16
14
12
ACTUAL
MILLION BARRELS/DAY
10
1982
1987
8
1990
1992
6
1994
4
2
0
1980
1985
1990
1995
2000
2005
2010
Source: M. Lynch, MIT
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 33 of 12
Recognition Of Risk (2)
Reason 1 : Surprises
– All forecasts are extensions of past
– Past trends always interrupted by surprises, by
discontinuities:
Major
political changes
Economic
New
booms and recessions
industrial alliances or cartels
The exact details of these surprises cannot be
anticipated, but it is sure surprises will exist!
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 34 of 12
Recognition Of Risk (3)
Reason 2 : Ambiguity
– Many extrapolations possible from any set of
historical data
Different
explanations (independent
variables)
Different
forms of explanations (equations)
Different
number of periods examined
– Many of these extrapolations will be "good"
to the extent that they satisfy usual statistical
tests
– Yet these extrapolations will give quite different
forecasts!
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 35 of 12
Recognition Of Risk (4)
The Resulting Problem: Wrong Plans
– Wrong Size of Plant, of Facility
Denver
Airport
Boston
Water Treatment Plant (See Case Studies)
– Wrong type of Facility
Although
"forecast" may be "reached”…
Components
that make up the forecast
generally not as anticipated, thus requiring
Quite
different facilities or operations
than anticipated
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 36 of 12
Range Of Choices (1)
The Usual Error
– Polarized Concept
– Choices Narrowly Defined around simple ideas,
on a continuous path of development
Examples
– Mexico City Airport: A Major New One
Yes or No?
– Size of Power Plants: 6 Megawatts
Yes or No?
(See Case Study of South African Power)
– Compliance with Laws: As written?
Yes or No?
Experience
of Planning for Electric Vehicles
for Los Angeles, California
Venezuela
(See Case Study)
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 37 of 12
Range Of Choices (2)
The Correct View
– All Possibilities must be considered
– The Number of Possible Developments,
considering all the ways design elements can
combine, is very large
The general rule for locations, warehouses
– Possible Sizes, S
– Possible Locations, L
– Possible Periods of Time, T
– Number of Combinations: {S exponent L} exponent T
Practical Example: Mexico City Airport
– Polarized View: "Texcoco" or "Zumpango"
– All Combinations: {2 exp 4}exp 3 = 4000+ !!!
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 38 of 12
Range Of Choices (3)
The Resulting Problem
–
Blindness to "98%" of possible plans of action
These
are the "combination" (or "hybrid")
possibilities that combine different tendencies
The
"combination" designs allow greatest
flexibility -- because they combine different
tendencies
–
Blindness to many possible developments
those
that permit a variety of futures
because
they do not shut off options
–
Inability to adapt to risks and opportunities
–
Significant losses or lost opportunities
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 39 of 12
Range Of Choices (4)
Practical Example: Mexico City Airport
– Most of the possible developments are combinations
of operations at 2 sites (instead of only 1)
– The simultaneous development at 2 sites allows the
mix and the level of operations to be varied over time
– The development can thus follow the many possible
patterns of development that may occur
– There is thus great flexibility
– Also ability to act economically and efficiently
Recommended Action
– Option on Zumpango Site
– Wait until next sexennial
– Then decide next step
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 40 of 12
Range Of Choices (5)
The Solution
– Enumeration of Possible Combinations
– General: Lists, Exact Numbering of Possibilities
– Detailed: Simulations
Practical Examples
– General Enumeration
New
Airports at Mexico City,
Sydney (See Case Study)
– Detailed Simulation
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 41 of 12
Decision Analysis
Objective
Motivation
Primitive Models
Decision Analysis Methods
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 42 of 12
Decision Analysis
Objective
–
To present a particular, effective technique for
evaluating alternatives to risky situations
Three Principal conclusions brought out by
Decision Analysis. Think in terms of:
1. Strategies for altering choices as unknowns become
known, rather than optimal choices
2. Second best choices which offer insurance against
extremes
3. Education of client especially about range of
alternatives
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 43 of 12
Motivation
People, when acting on intuition, deal poorly
with complex, uncertain situations
–
–
They process probabilistic information poorly
They simplify complexity in ways which alter reality
Focus on extremes
Focus on end states rather than process
Example: Mexico City Airports
Need for structured, efficient means to deal
with situation
Decision Analysis is the way
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 44 of 12
Decision Tree
Representing the Analysis -- Decision Tree
– Shows Wide Range of Choices
– Several Periods
– Permits Identification of Plans that
Exploit Opportunities
Avoid Losses
Components of Decision Tree
– Structure
Choices; Possible Outcomes
– Data
Risks; Value of Each Possible Outcome
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 45 of 12
Decision Analysis
Structure
–
The Decision Tree as an organized, disciplined means
to present alternatives and possible states of nature
Two graphical elements
1. Decision Points
2. Chance Points
(after each decision)
C
D
D
D
C
D
D
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
C
C
C
C
C
C
C
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 46 of 12
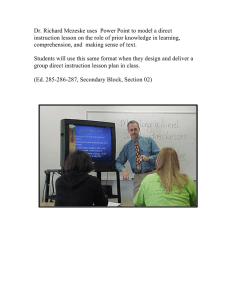
Rain Coat Problem
Weather Forecast: 40% Chance of Rain
Outcomes:
If it rains and you don’t take a raincoat = -10
If it rains and you take a raincoat = +4
If it does not rain and you don’t take a coat = +5
If it does not rain and you take a coat = -2
Question: Should you take your raincoat given
the weather forecast (40% chance of rain)?
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 47 of 12
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 48 of 12
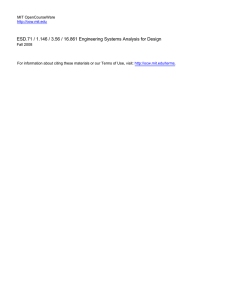
Decision Analysis
Calculation
–
Maximize Expected Value of Outcomes
For each set of alternatives
–
–
Calculate Expect Value
Choose alternative with
maximum EV
Raincoat
Rain p=0.4
5
No Rain p=0.6
-2
Rain
-10
C
D
No Raincoat
C
4
No Rain
EV (raincoat)
=
2.0 - 1.2 =
0.8
EV (no raincoat = - 4.0 + 2.4 = - 1.6
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 49 of 12
For Sequence of Alternatives
Start at end of tree (rightmost edge)
Calculate Expected Value for last (right hand
side) alternatives
Identify Best
–
This is the value of that decision point, and is
the outcome at the end of the chance point for
the next alternatives
This is also the best choice, if you ever, by
chance, reach that point
Repeat, proceeding leftward until end of tree
is reached
Result: A sequence of optimal choices based
upon and responsive to chance outcomes “A Strategy”
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 50 of 12
Structure (continued)
Two data elements
1. Probability
2. Value of each outcome
C p
1-p
D
D
D
C
p
1-p
D
D
C p1
C1-p1
C
.
C
.
C
.
C
C p2
1-p2
01
02
016
When does it become a “messy bush”?
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 51 of 12
Results Of Decision Analysis
NOT a Simple Plan
– Do A in Period 1; Do B in Period 2; etc.
A DYNAMIC PLAN
– Do A in Period 1,
– BUT in Period 2:
If
Growth, do B
If
Stagnation, do C
If
Loss, do D
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 52 of 12
Decision Analysis Consequences
Education of client, discipline of decision tree
encourages perception of possibilities
–
–
A strategy as a preferred solution
NOT a single sequence or a Master Plan
In general, Second Best strategies not optimal
for any one outcome, but preferable because
they offer flexibility to do well in a range of
outcomes
I.E., It is best to buy insurance!
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 53 of 12
Outline Of Phase 3:
Dynamic Strategic Planning
The Choice
– Preferred Choice depends on Satisfaction of
Decision-Makers, or Customers
– Not a technical absolute
The Dynamic Strategic Plan
– Buys Insurance -- by building in flexibility
– Commits only to immediate First Period Decisions
– Balances level of Insurance to Feelings for Risk
– Maintains Understanding of Need for Flexibility
Examples -- See Case Studies
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 54 of 12
The Choice
Any Choice is a PORTFOLIO OF RISKS
– Nothing can be guaranteed
Choices differ in two important ways
– The "Average" Returns (Most Likely, Median,
Expected)
– Their Performance over a Range of Scenarios
In General, they either
– Perform well over many scenarios (they "fail
gracefully" because they lose performance gradually)
– Give good returns only for specified circumstances,
otherwise they do not
A Choice is for First Period Only
– New Choices available later
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 55 of 12
The Best Choice
Permit good performance over a range
of scenarios
They achieve overall best performance by
– Building in Flexibility, to adjust plan to situation
in later periods -- this costs money
– Sacrificing Maximum Performance under some
circumstances
"Buy Insurance" in the form of flexibility,
the capability to adjust rapidly and easily to
future situations
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 56 of 12
The Preferred Choice
One of the best choices, those that provide
flexibility
Depends on Feelings about Risk and
Performance
– What are acceptable levels for company?
May not be the same for different companies,
or at different times
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 57 of 12
Dynamic Strategic Plan (1)
Buys "INSURANCE”
– Against risks
– By building in flexibility
Management of Risk
– Very similar to risk management for portfolios
– Best strategies involve hedging of the risks
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 58 of 12
Dynamic Strategic Plan (2)
COMMITS ONLY TO FIRST PERIOD DECISIONS
– Decisions in Second and later periods deferred
– Decisions for later periods will depend on market
conditions at those times
See Case Studies
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 59 of 12
Dynamic Strategic Plan (3)
BALANCES THE LEVEL OF INSURANCE TO
THE FEELINGS ABOUT RISK AND
PERFORMANCE
– Amount of Insurance (Flexibility) is not fixed
– Level of Insurance is a Choice
– Choice must be appropriate to company
– Level of Insurance thus depends on Company’s
situation, its feelings about risk and performance
See Case Studies
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 60 of 12
Dynamic Strategic Plan (4)
CAREFULLY MAINTAINS UNDERSTANDING OF
THE NEED FOR FLEXIBILITY
– Often Directors, Staff or Company become fixed on
plan through personal commitments -- they make it
difficult to make adjustments when desirable
– Organizational ability to adjust plans to actual,
market conditions must be carefully maintained
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 61 of 12
Outline Of Examples
Example of Failed Planning
– Electric Vehicles for Los Angeles
Examples of Successful Dynamic Strategies
– Ceramic Auto Parts
– Airport Development in Australia
Examples of Improvements through DSP
– Size of South African Power Plants
– Choice of Technology for Water Treatment
Examples of Dynamic Strategies in Progress
– Meeting Competition with Contracting Strategies
– Facing New Laws -- Petroleos de Venezuela, SA
Dynamic Strategic Planning, MIT
Massachusetts Institute of Technology
Richard de Neufville, Joel Clark, and Frank R. Field
Overview
Slide 62 of 12