ks F k s
advertisement

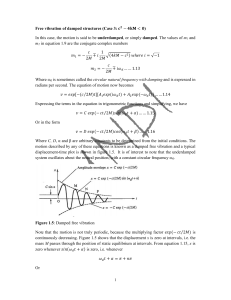
Differential Equations – Section 5.1 – Homework: 1, 3, 5, 11, 21, 23, 29 Hooke’s Law - F ks , k = spring constant, s = amount of elongation, F =restoring force Newton’s Second Law – Free Undamped Motion or Simple Harmonic Motion d 2x 2 x 0 where 2 k / m , 2 dt Solution: x(t ) c1 cos t c2 sin t x(0) x0 =the amount of initial displacement x(0) x1 = the initial velocity of the mass The period of free vibrations is T 2 / and the frequency is f 1 / T / 2 . A maximum of x(t) is a positive displacement corresponding to the mass’s attaining a maximum distance below the equilibrium position, whereas a minimum of x9t) is a negative displacement corresponding to the mass’s attaining a maximum height above the equilibrium position. We refer to either case as an extreme displacement of the mass. The particular solution is the equation of motion. #2 #6 x(t ) c1 cos t c2 sin t A sin t where c c and is the phase angle defined by sin 1 and cos 2 . A A If you need to find the amplitude of motion, recall from trig: A c1 c2 2 #8 2 Free Damped Motion – We will assume that the damping force is given by a constant multiple of be modeled by Case I: dx . The motions will dt k d 2x dx 2 2 x 0 where 2 , 2 . 2 m m dt dt 2 2 0 The system is said to be overdamped. The solution is x(t ) e t c1e 2 2 t c2 e This equation represents a smooth an nonoscillatory motion. Case II: 0 The system is said to be critically damped. The solution is Any slight decrease in the damping force would result in oscillatory motion. 2 Case III: x(t ) e #22 2 2 2 0 t c cos 1 The system is said to be underdamped. The solution is 2 t c2 sin 2 2 t 2 . x(t ) e t c1 c2 t . 2 2 t .