Color Classification Using Adaptive Dichromatic Model
advertisement

Color Classification Using Adaptive
Dichromatic Model
Proceedings of the 2006 IEEE International Conference
on Robotics and Automation Orlando, Florida
May 2006
Student ID : M9920103
Student
: Kun-Hong Lee
Teacher
: Ming-Yuan Shieh
Outline
• ABSTRACT
• INTRODUCTION
• DESCRIPTION OF THE METHOD
– DICHROMATIC REFLECTANCE MODEL
– COLOR CLASSIFICATION AND ADAPTATION
– ALGORITHM IMPLEMENTATION
• EXPERIMENTAL RESULTS
• CONCLUSION AND FUTURE WORK
• REFERENCES
ABSTRACT
• Color-based vision applications face the challenge that
colors are variant to illumination. In this paper we present a
color classification algorithm that is adaptive to continuous
variable lighting.
• Motivated by the dichromatic color reflectance model, we
use a Gaussian Mixture Model (GMM) of two components
to model the distribution of a color class in the YUV color
space.
• The GMM is derived from the classified color pixels using
the standard Expectation-Maximization (EM) algorithm,
and the color model is iteratively updated over time.
• The novel contribution of this work is the theoretical
analysis – supported by experiments – that a GMM of two
components is an accurate and complete representation of
the color distribution of a dichromatic surface.
INTRODUCTION
• Color has been used as an important feature in machine
vision applications because of its advantages over other
image features. However, color faces the inevitable problem
of being affected by illumination.
• To address this concern, adaptive color modeling has
attracted intense research interests, and its use in color
tracking applications shows promising results [14], [13], [8].
In this approach, color is generally represented by either a
non-parametric model or a parametric model.
A commonly used non-parametric model is color
histogram [11], [8], and it is appropriate in problems with a
large data set and coarsely quantized color space [7].
Gaussian is a commonly used parametric color model in
many color-based computer vision applications such as for
face and skin tracking or detection [12], [15].
Generally,a single Gaussian model is applicable to objects
with an uniform color surface of approximately Lambertian
property and negligible specular reflection.
When an object surface does not satisfy these conditions, a
Gaussian mixture can be used instead [14].
Previous works using GMM however focused on the model
order selection problem, i.e., how to choose the number of
parameters of the GMM in order to accurately model the
underlying distribution.
In this paper we present a real-time algorithm for color
classification using adaptive color modeling.
We use Gaussian mixture model (GMM) of two
components in the YUV space to model the distribution of
a color class, according to the reflectance property of
dichromatic materials.
DESCRIPTION OF THE METHOD
DICHROMATIC REFLECTANCE MODEL
• Most previous works in adaptive color modeling are based
on the assumption that the object surfaces are Lambertian.
• Therefore, the underlying probability distribution of the
color model can be reasonably represented by a single
Gaussian. This is a rather simplified model of the material’s
reflectance property as in practice many materials violates
this assumption.
The dichromatic reflectance model describes the reflected
light from a dielectric material surface L(λ, i, e, g), as the
mixture of two portions, the surface reflection Ls(λ, i, e, g)
and the body reflection Lb(λ, i, e, g).
L(λ, i, e, g) = Ls(λ, i, e, g) + Lb(λ, i, e, g) (1)
where i, e, and g describe the angles of the incident and
emitted light and phase angle, and λ is the wavelength.
• If we assume there is only a single light source, and
there is no inter-reflection between the objects in the
scene, we can separate the surface reflectance
component Ls(λ, i, e, g) as the product of a specular
power distribution cs(λ) and a scalar ms(i, e, g).
• Also we can separate the body reflectance component
Lb(λ, i, e, g) as the product of a specular power
distribution cb(λ) and a scalar mb(i, e, g). Equation (1)
can be written as the dichromatic reflection model
equation as below:
L(λ, i, e, g) = ms(i, e, g)cs(λ) + mb(i, e,
g)cb(λ) (2)
• Thus the light reflected from an object point can be
described as a mixture of two distinct spectral power
distributions, cs(λ) and cb(λ). Each of these spectral power
distributions is scaled according to the geometric
reflection property of the body and surface reflection.
• The body part models conventional matte surfaces, which
exhibits the Lambertian characteristic.
• The surface part models highlights, which have the
same spectral power distribution as the illuminant.
Klinker et al. show that for convex shaped objects with
dichromatic reflectance, the distribution of RGBs
maps out to a T shape, with the bar of the T
corresponding to body reflectance, and the stem of the
T corresponding to surface reflectance [4]. This is
consistent with our experimental data shown in Figure
1.
• The dichromatic model has proved useful for a variety
of computer vision tasks including color constancy [5],
shape recovery [2] and segmentation [1].
DESCRIPTION OF THE METHOD
COLOR CLASSIFICATION AND ADAPTATION
• A. Color Modeling
• In our system, we choose GMM to represent the color
model based on the dichromatic reflectance model.
The dichromatic reflectance model explains a color
distribution as the combination of two clusters: diffuse
cluster from the body reflectance and specular cluster
from the surface reflectance.
• Suppose we have a color class O, and the color
distribution of O can be modeled as a Gaussian
mixture model of two
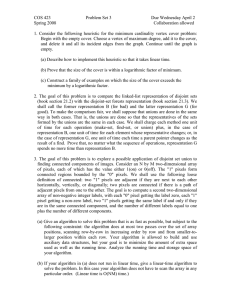
Fig. 1. The color distribution
of a blue color patch in RGB
(left column)
and UV space (right column).
From top to bottom this color
patch is located at different
positions on the field,
experiencing spatial lighting
variation.
Gaussian components. Given a pixel ξ, the conditional
density
for ξ to belong to O is
where P(j) is the prior probability that pixel ξ is generated
by component j, and
P(j) = 1. If we assume that each
Gaussian component has a mean μj and a covariance
matrix Σj ,
B. Color Space
Our system uses YUV color space for color classification.
YUV space is commonly used in a computer vision system
to deal with mild lighting variation.
Y channel, which represents luminance, captures most of
the variations due to the luminance change of the
environment, and UV plane which represents chromoticity
is insensitive to the luminance change.
Our initial empirical data suggested that a color classifier
defined on UV plane is capable of accurately classifying
colors despite the mild illumination variation on the field
under a stable lighting condition.
Figure 1 shows the color distribution of a blue color patch
in RGB and UV space respectively, after being positioned at
different locations on the field, while the room lighting is
kept the same.
• Notice that in RGB space, the color distribution has a wide
range of evolution because of the illumination variation at
different parts of the field, while the color distribution in
UV space is comparatively stable.
• Although a color classifier defined on UV plane can be
reasonably accurate under mild lighting variations, and
most of all it shows robustness against illumination
intensity change,it is not suitable for more general
situations, especially when the specular component starts
to be a significant portion of the color distribution.
• In this case, a classifier defined on UV plane will over-
classify similar background colors. As we can see from the
Figure 7, the specular component does not evolve along the
intensity channel.
• Therefore the projection of this component on UV plane is
an over-generalized classifier. For this situation, a classifier
on YUV space would be more accurate.
Fig. 7. The evolution of the
distribution of green color in RGB
space (left column) and YUV space
(right column).
From top to bottom, illumination
intensity decreases by changing the
room lighting from light to dim. The
red dots and the green dots
represent the pixels belonging to
one of the two Gaussians in GMM.
• C. Color Adaptation
• The adaptation scheme used in our system is a simple
exponentially decaying function. Once a Robocup
soccer game starts, color blobs are located in each
image frame, using the current color models.
• After the noisy blobs are filtered out by applying some
spatial constraints, the selected blobs are used as
labeled samples to measure the GMM at the current
time step.
Suppose at time step
, a number of sample pixels {
,i
=1...n} are collected from the image frame, and a measured
GMM,
, is built for this color using these pixels.
Also we have a current color model estimated at time step k
− 1, as
Now we need to use the previously estimated
model
and the currently measured model
to derive the currently estimated model
.
Practically for the sake of space efficiency, we approximate
a 3D GMM by its three 2D projections, and convert each 2D
GMM to a probability distribution table in the
corresponding projection plane; i.e., for each color we have
three probability tables:PUV , PYU, and PYV .
Each of these tables is of dimension 256 × 256, and the
entry contains the probability value of the color being
evaluated by the GMM.
Suppose we have a decay factor of α in [0, 1], the indexes of
the probability table are i = 1...256, j = 1...256, our
exponentially decaying mechanism will update each entry
of the probability tables as:
DESCRIPTION OF THE METHOD
ALGORITHM IMPLEMENTATION
Our adaptive color classification algorithm is implemented
in the color vision system for a RoboCup team at our
university.
The vision system uses an IEEE 1394 (Firewire) Dragonfly
camera and a normal Linux PC. The camera is made by
Point Grey Research Inc., and it features a single 1/3”
progressive scan CCD.
The PC has an off-the-shelf Firewire capture card, and
AMD Athlon XP 1700+ processor with 512 MB of RAM.We
use the camera to sample 640×480 24 bit RGB color images
at 30 fps into the PC.
The system works in two steps. The first step is offline color
calibration, and the second step is on-line adaptive color
classification. Both are described in detail in this section.
A. Off-line Color Calibration
The offline color calibration step, shown in Figure 2,
extracts pixels of a target color class from a displayed image
of a live video, and uses these sample pixels to build a color
model which incorporates spatial variation of illumination
on the field.
This step is under the supervision of a human operator, and
the finalized model is used to initialize the system.
Fig. 2. Flowchart of the offline color calibration procedure used to initialize color
classes of interest, each in terms of a two-component Gaussian mixture expressed in
the form of a look-up table (LUT)
To start the calibration step, user selects pixels of the
interesting color classes (typical 3 to 4) from the color
blobs in an image using an interactive tool.
The locations of the selected pixels initialize a color tracker.
The color tracker follows the movement of the object from
which the selected pixels are sampled.
The tracker selects the image region which includes the
object as a tracking window, within the tracking window
the selected pixels are used as seeds in a region growing
process to include neighboring pixels of the same color.
The pixels being selected by region growing form blobs,
and the locations of the blobs are used as a cue to update
the position of the tracking window in the consequent
mage frame.
For each image, the tracker collects all the pixels selected
by region growing inside the tracking window as the
sample pixels of the interesting color. As the robot moves
over the field, the set of sample pixels can account for
spatial variation of illumination.
This data collecting process stops when the robot
approximately goes through representative locations on the
field, especially the places with significant different
illuminations. The sample pixels collected during this step
are then used to derive the GMM of two components using
a standard EM algorithm.
The derived GMM is used by the vision system as color
model for classifying this color. Multiple color classes
(yellow, green, and pink, e.g.) can be modeled in parallel
with this process since each robot top typically carries at
least three colors in our application.
B. On-line Adaptive Color Classification
When a game starts, the pre-calibrated color models are
used by the vision system for color classification.
Meanwhile, an adaptation procedure, shown in Figure 3, is
executed to update the color models in real-time in order
to adapt to dynamic lighting.
Specifically, color classification is performed on all the
pixels of an image using the current look-up tables (LUT).
Fig. 3. Flowchart for the on-line color adaptation procedure, which uses a linear
combination of the old and new color samples to update the Gaussian mixture of
each color class to account for temporal variation of lighting
This process labels each pixel with a color class, either one
of the interesting colors or the background. Region
growing is then applied using as seeds each of the pixels
labeled with an interesting color class to include the
neighboring pixels within a threshold color distance.
The purpose of the region growing step is to reduce false
negatives, which are the pixels belonging to the color class
but not picked up by the classifier due to possibly spatial or
temporal variation of illumination.
By incorporating these false negatives into the set of
measured data, we can have a more accurate measurement
of the current color model in order to update the model.
After region growing, the labeled pixels of each color class
are connected to form a number of color blobs if they are
spatially connected. Usually some of the blobs consist of
false positives due to the background noise or overclassification by the inaccurate color model.
The noisy blobs are filtered by applying a set of geometric
constraints based on the expected height and the width of
each blob, the density of the color pixels within each blob,
etc.
The filtered blobs then form the candidates of potential
markers of the robots and the ball with which to locate and
identify the robots and the ball with higher-level Robocup
software.
For each of the identified robots and the ball, their color
blobs are used as labeled samples to derive the GMM as the
measured color model at the current time step.
For each blob only pixels in the center region within a
certain radius are used to build GMM.
This is based on our observation that the boundary pixels
of each blob are often affected by the color region
surrounding the blob due to camera noise.
These pixels are likely to steer a color model toward a false
target.
The evaluation of the GMM from collected labeled pixels is
done once every 20 frames. It is unnecessary to re-evaluate
the GMM for each frame unless the illumination condition
goes through a rapid change.
In our application the rapid change of illumination rarely
happens. The first benefit of re-evaluating the GMM after a
time interval is efficiency.
Another benefit is that since the robots are moving around
over the field, a number of frames can provide a more
complete set of sample pixels to capture the spatial
variation of illumination.
EXPERIMENTAL RESULTS
A series of comparison experiments were carried out to
examine the robustness of our algorithm under dynamic
lighting. Lighting in the experiments varies spatially
naturally as the result of uneven distribution of light
fixtures in the laboratory where our RoboCup field was set
up.
In addition, lighting was made to vary temporally by
controlling the dimmer in the laboratory. A photographic
meter (Minolta Autometer VF) was used to determine
illumination, which was found to range from 40 lux to 320
lux on the two extreme ends of darkest and brightest.
The x-axis of all figures in this section represents the frame index
that is linearly correlated with this lux number.
The first experiment compares the classification accuracy
between adaptive algorithm and non-adaptive algorithm under
dynamic illumination.
Figure 4 compares the numbers of correctly classified pixels – for
two color classes, blue and pink – using adaptive algorithm and
non-adaptive algorithm. It is clear that the adaptive algorithm is
capable of handling illumination change through a broad range
while the non-adaptive algorithm fails very quickly after
illumination changes.
Fig. 4. Comparison of the correctly classified pixels between adaptive color
classification and non-adaptive color classification under gradually changing
lighting.
The x-axis represents the image frame number which is correlated with the
room brightness from 70 lux to 256 lux
With a total of four robots in the field of view of the
camera, the number of correctly identified robots was also
compared in Figure 5, for the adaptive and static color
models.
The non-adaptive algorithm failed quickly as soon as the
room lighting became different from that under which the
color models were originally calibrated.
Fig. 5. Comparison of the correctly identified robots between adaptive color
classification and non-adaptive color classification under gradually increasing
lighting.
The total number of robots is 4. The x-axis is interpreted in the sameway as
Figure 4
Figure 6 shows the results of using both diffuse and
specular component and using only diffuse component,
applying the number of correctly identified robots as the
performance metric.
Classification using both the diffuse and the specular
components significantly outperforms that using only
diffuse component. These two components were separated
based on their Y values, according to the observation that
diffuse component has a lower luminance than specular
component.
Fig. 6. Comparison of the correctly identified robots by
adaptive color classification in YUV space under gradually
changing lighting between using only the diffuse
component and both diffuse and specular components.
CONCLUSION AND FUTURE WORK
In this paper we have presented a study of the color
classification problem, proposed an adaptive color
classification algorithm, and implemented the color
classification algorithm in a RoboCup vision system, which
has been successfully used for several years in RoboCup
competition.
The experimental results show that our two-component
GMM can handle dynamic lighting condition more reliably
than a static algorithm and than single-component
Gaussian color model used commonly in previous studies,
demonstrating that GMM is a good approximation of the
color distribution of an dichromatic surface.
The algorithm can be expected to serve as an accurate
model for many general color classification applications.
Also the simplicity of our algorithm ensures that it can be
effectively implemented in real-time.
For further details of the work reported in this paper,
please refer to [6].
REFERENCES
[1] M.H. Brill. Image segmentation by object color: a unifying framework and connection to color constancy. J. Opt. Soc.
Am. A, 7:2041–2047,1990.
[2] M.S. Drew and L.L. Kontsevich. Closed-form attitude determination under spectrally varying illumination. In
Computer vision and pattern recognition, pages 985–990, 1994.
[3] A. Elgammal, R. Duraiswami, and L. Davis. Efficient nonparametric adaptive color modeling using fast gauss
transform. In Proc. IEEE Conf. Computer Vision and Pattern Recognition, volume 2, pages 563–570, Dec 2001.
[4] G. J. Klinker, S. A. Shafer, and T. Kanade. The measurement of highlights in color images. International Journal of
Computer Vision,2(1):7–32, 1988.
[5] H. Lee, E. J. Breneman, and C. P. Schulte. Modelling light reflection for computer color vision. IEEE transactions on
Pattern Analysis and Machine Intelligence, 4:402–409, 1990.
[6] Xiaohu Lu. Adaptive colour classification for robocup with gaussian mixture model. Master’s thesis, University of
Alberta, 2005.
[7] S. J. McKenna, S. Jabri, Z. Duric, and A. Rosenfeld. Tracking groups of people. Computer Vision and Image
Understanding, 80:42–56, 2000.
[8] K. Nummiaro, E. B. Koller-Meier, and L. Van Gool. Object tracking with an adaptive color-based particle filter.
Symposium for Pattern Recognition of the DAGM, pages 355–360, 2002.
[9] Tominaga S. and B. A. Wandell. Standard surface-reflectance model and illuminant estimation. Journal of the
Optical Society of America A, 6(4):576–584, 1989.
[10] S. A. Shafer. Using color to seperate reflection components. Color Res. App., 10(4):210–218, 1985.
[11] M J. Swain and D. H. Ballard. Color indexing. Int.J. Computer Vision, 7(1):11–32, 1991.
[12] C. Wren, A. Azarbayejani, T. Darrel, and A. Pentland. Pfinder: Realtime tracking of the human body. IEEE
Transaction on Pattern Analysis and Machine Intelligence, 1995.
[13] Y. Wu and T. S. Huang. Color tracking by transductive learning. In Proc. IEEE Int’l Conf. on Comput. Vis. and Patt.
Recog., pages 133–138, 2000.
[14] Raja Y, McKenna S J, and Gong S. Colour model selection and adaptation in dynamic scenes. European Conference
of Computer Vision (ECCV), pages 460–474, June 1998.
[15] J. Yang, W. Lu, and A. Waibel. Skin-color modelling and adaptation. In Proc. of Asian Conference on Computer
Vision, pages 687–694, 1998.