GECKO BIOMIMETIC FOR REVERSIBLE ADHESION Silvia Adriana Estrada Alvarez
advertisement

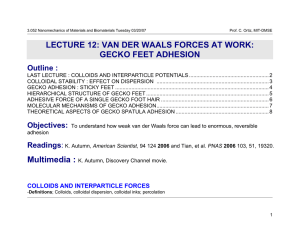
南台科技大學 化學工程與材料工程系所 碩士論文 GECKO BIOMIMETIC FOR REVERSIBLE ADHESION 研究生:施幸華 Silvia Adriana Estrada Alvarez 指導教授:林鴻儒 教授 中華民國 103 年 ii ABSTRACT i ACKNOWLEDGMENTS ii TABLE OF CONTENTS ABSTRACT .................................................................................................................................. I ACKNOWLEDGMENTS............................................................................................................II TABLE OF CONTENTS........................................................................................................... III LIST OF TABLES ..................................................................................................................... IV LIST OF FIGURES.................................................................................................................... IV CHAPTER I ................................................................................................................................. 1 INTRODUCTION ...................................................................................................................................... 1 1. Background .................................................................................................................................. 1 2. Research Motivation................................................................................................................. 2 CHAPTER II ................................................................................................................................ 4 LITERATURE REVIEW ........................................................................................................................... 4 1. THE TOE ADHESIVE FORCE .................................................................................................. 4 2. ADHESION ..................................................................................................................................... 5 3. CONTACT ANGLE ....................................................................................................................... 5 4. ADEQUATE MATERIALS ......................................................................................................... 7 CHAPTER III .............................................................................................................................. 8 RESEARCH METHOD.............................................................................................................................. 8 1. Chemicals ....................................................................................................................................... 8 2. Glassware and Equipment ..................................................................................................... 8 3. Methodology................................................................................................................................. 8 4. Scanning electron microscope ............................................................................................. 8 5. Contact Angle............................................................................................................................... 8 CHAPTER IV............................................................................................................................... 9 RESULTS AND DISCUSSION ................................................................................................................... 9 1. Scanning electron microscope ............................................................................................. 9 2. Contact Angle............................................................................................................................... 9 CHAPTER V ..............................................................................................................................10 CONCLUSION ........................................................................................................................................ 10 REFERENCES ...........................................................................................................................11 iii LIST OF TABLES Table 1 Selected physical and mechanical properties of common biocompatible polymerrs. ................................................................................................................................. 7 LIST OF FIGURES Figure 1 The hierarchical structures of Gekko gecko. ........................................................... 2 iv CHAPTER I INTRODUCTION 1. BACKGROUND GECKOS AND THEIR TOES STRUCTURE Geckos are a type of reptile belonging to the infraorder Gekkota. They are found in different sizes from 1.6 to 60cm, with different weights. They are common in warm regions of the world, where several species of geckos make their home inside human residences, but they are harmless to human healthy. Unlike most lizards, geckos are usually nocturnal and because they are great climbers they include in their diet insect pest, such as roaches. Many species of them posses the amazing ability to run up and down, wander, race, sprint and even fight on smooth wall and ceilings with ease using their remarkable toes. Which are specialized enabling them to climb smooth and vertical surfaces and even indoor ceilings. Gecko toes have special adaptations that allow them to adhere to most surfaces without the use of liquids or surface tension. About 60% of gecko species have adhesive toe pads; such pads have been gained and lost repeatedly over the course of gecko evolution. [Gamble et al. 2012] Comparative studies of hundreds of insects and other animal species revealed that biological attachment systems basically converge to two principal designs: a ‘‘hairy’’ system consisting of finely structured protruding hairs with size ranging from a few hundred nanometers to a few microns, dependent upon the animal species, and a ‘‘smooth’’ system with relatively smooth surface covering a fine tissue microstructure [Scherge and Gorb, 2001; Niederegger et al., 2002; Gorb et al., 2000]. Gecko toes are not sticky in the same manner as traditional pressure-sensitive adhesives (PSAs), such as adhesive tape. Instead, the toes are covered with a ‘‘smart” adhesive of micro- and nano-structures of b-keratin that adhere strongly yet are nonfouling, non-tacky and detach easily [Autumn K., 2000; Autumn K. et al., 2006]. Each toe bears a hierarchical structure composed of a series of ridges bearing hair-like shafts (setae) which divide into hundreds of flat tips called spatula [Autumn K. et al., 2006], shown in Fig. 1. A gecko is found to have hundreds of thousands of 1 keratinous hairs or setae on its foot; each seta is 30–130 lm long and contains hundreds of protruding submicron structures called spatulae (Fig. 1). Possible mechanisms of biological attachment include mechanical surface interlocking, fluid secretion (capillarity and viscosity) and molecular adhesion (van der Waals interaction). If we consider the animal hairy systems, the density of setae strongly increases with the body weight of the animal, and geckos have the highest hair density among all animal species that have been studied (Scherge and Gorb, 2001). Figure 1 The hierarchical structures of Gekko gecko. A toe of gecko contains hundred of thousands of setae and each seta contains hundreds of spatulae. (a) and (b): scanning electron micrographs of rows of setae at different magnifications and (c): spatulae, the finest terminal branches of seta. ST: seta; SP: spatula; BR: branch. [H. Gao et al. 2004] 2. RESEARCH MOTIVATION Surfaces with reversible adhesion are of interest in various applications, such as self-cleaning windows and display screens for electronic devices, exterior paints for building, navigation ships, textiles, and solar panels. Because these type of surfaces exhibit wear resistance and self-cleaning, they can also detach via peeling action to provide reversible adhesion. Attempts are being made to develop climbing robots using gecko inspired structures [Cutkosky, M., et al., 2009]. 2 Due to the highly optimized and efficient properties of living nature organism surfaces and their potential applications, researchers have studied their mechanisms and exploited them for commercial applications [Bailey, L.W. et al., 1975, Bhushan, B., 2012., Bhushan, B. et al. 2012, Choi. K.M., 2003]. In order to get the Lotus effect, hierarchical structures using wax structures, nanotubes, and nanoparticles have been fabricated by a large number of investigators. In order to obtain the gecko effect, a high density of nanofibers is required. Hard materials such as carbon nanotubes have been used to fabricate gecko-like structures to get high fiber density [Bhushan B. 2010, Cutkosky M 2009]. The hard materials provide high resistance to wear and surface contamination. To provide higher adhesion and adaptability to mating surfaces, soft materials such as polymers have been used to fabricate a one-level fibril structure [DeLassus P.T. et al. 2009, Kiat-ammuay S. et al. 2010, Lee, J. 2008, Lee, H. et al. 2012, Ruibal R. 1965]. The fabrication processes used are complicated and generally provide a low aspect ratio of length (height) to diameter of fibers, and the diameter of the fibers is generally on the microscale. 3 CHAPTER II LITERATURE REVIEW 1. THE TOE ADHESIVE FORCE The high-adhesion mechanism of geckos is based on so-called division of contacts [Arzt, et al., 2003. Autumn, 2007., Bhushan, 2007. Bhushan, 2010]. Cumulative van der Waals attraction results in strong adhesion. In addition to strong adhesion, because of a three level hierarchical structure, they have the ability to adapt to a variety of surfaces. They exhibit wear resistance and selfcleaning. The total clinging force produced by a Tokay gecko can be more than 20 N [Irschick, D. J. et al., 1996], a strong force for an animal with a body weight of about 43 grams and an average 227 mm2 of footpad area. The gecko footpad areas are covered with hundreds of thousands of setae with a density of 5300/mm2 [Ruibal, R. et al 1965]. Each seta is branched into hundreds of spatulas with dimensions of about 100 nm, as shown in Fig. 1. This configuration allows the spatulas to follow the surface topography. Assuming that all spatulas are in contact with the surface, the adhesion force contribution of individual seta and spatula is around 20 mN and tens of nanonewtons, respectively. Numerous attempts have been made to study and understand the nature of the adhesive force between the spatulas and the surface [Autumn, K. et al., 2002] as well as the effect of spatula orientation [Autumn, K. et al. 2000] but the complex structure of a gecko seta has made it difficult to determine how many spatulas are in instantaneous physical contact with the sensor. Nevertheless it is crucial to understand the nature of gecko adhesion force to manufacture gecko mimicking devices [Geim, A. K. et al. 2003]. In general, the total force between two surfaces in close proximity consists of many components [Israelachvili, J. N. 1992.] including the van der Waals, dipole, and capillary forces. However, discrimination among the individual force components presents a considerable 4 challenge especially for weak surface interaction forces such as the van der Waals force, because it is typically accompanied by stronger forces such as the capillary force in air or a dipole force in water. Due to the fact that in any natural habitat the relative humidity is always at least 10%, it is possible that the capillary force plays a role in the gecko’s consistently impressive adhesion. 2. ADHESION Adhesion can be defined as the tendency of different types of particles or surfaces to bind to one another. There are several forces that can cause adhesion, between these ones there is dispersive adhesion. In this type of adhesion two materials are held together by van der Waals forces, that are the attraction between two molecules, each of which has a region of slight positive and negative charge. In a system with solid-liquid-gas (such as a melting ice cube surrounded by air) the contact angle is used to evaluate adhesiveness indirectly. Generally, cases where the contact angle is low are considered of higher adhesion per unit area. This approach assumes that the lower contact angle corresponds to a higher surface energy. [Israelachvili, J. N. 1992.] 3. CONTACT ANGLE The primary parameter that characterizes wetting is the static contact angle, which is defined as the angle that a liquid makes with a solid. The contact angle depends on several factors, such as surface energy, surface roughness, and its cleanliness [Nosonovsky, et al., 2008.; Adamson,1990.; Bhushan,1999.; Bhushan, 2002.]. Surfaces with contact angles in the 0° ≤ 𝜃 ≤ 90° and 90° ≤ 𝜃 ≤ 180° ranges are hydrophilic and hydrophobic, respectively. In particular, surfaces with contact angles between 150° and 180° are called superhydrophobic. Water contact angle hysteresis (CAH) is another property of interest to reduce drag in fluid flow. CAH occurs due to surface roughness and heterogeneity. Contact angle hysteresis is a measure of energy dissipation during the flow of a droplet along a 5 solid surface. A liquid droplet on a solid surface removes contaminant particles by rolling in addition to sliding at low CAH. Surfaces with low CAH (<10°) are generally referred to as self-cleaning [Nosonovsky, et al., 2008]. The contact angle can be determined by minimizing the net surface free energy of the system of a liquid droplet on a solid surface. Superhydrophobic surfaces exhibit extreme water repellent properties. Certain plant leaves, notably Lotus leaves, are known to be superhydrophobic and self-cleaning with low adhesion, known as the Lotus effect [Nosonovsky, et al., 2008.; Adamson,1990.; Bhushan,1999.; Bhushan, 2002.; Bhushan, 2012.]. These properties are achieved by having a hydrophobic surface and a hierarchical structure with both micro- and nanoscale dimensions. The explanation for the adhesion properties of the gecko feet can be found in the morphology of the skin on the toes of the gecko. On the Lotus surface, the papillose epidermal cells form asperities and provide microscale roughness. A range of waxes made from a mixture of long chain hydrocarbon compounds which are not easily wetted are usually present on the Lotus surface. A microscale roughness surface is covered by sub-microscale asperities of threedimensional epicuticular waxes, creating a hierarchical structure. The hierarchical structure of the Lotus surface has low adhesion due to the low density of the sub-microscale asperities. Nanoscale roughness allows water droplets to sit easily on the apex of the nanostructures, because air pockets occur in the valleys of the structure under the droplet, resulting in high contact angle and low CAH. Therefore, the Lotus leaves have low adhesion, superhydrophobicity, and self-cleaning. The toe skin of the gecko is also comprised of a complex hierarchical structure of lamellae, setae, branches, and spatulae [R. Ruibal, et al. 1965] The division of contacts serves as a means for increasing adhesion [Autumn, K.,2002]. The surface energy approach can be used to calculate adhesion force in a dry environment in order to calculate the effect of division of contacts. 6 4. ADEQUATE MATERIALS Polypropylene and polyethylene, biocompatible polymers, were used in earlier studies on the fabrication of hierarchical structures, where it was found that either the gecko effect or the lotus effect (low adhesion, superhydrophobic surface) can be attained by varying the size and the number of fibers per unit area [Bhushan B. et al. 2012, Lee H, et al. 2012]. Polymers of choice for prostheses include silicone-based polymers such as polydimethylsiloxane (PDMS) [Wolfaardt, J.F. , et al., 1996] and polyethylene [Kiat-amnuay S., et al. 2010]. Table 1 provides a summary of selected physical (such as the melting temperature, Tm, and glass transition temperature, Tg) and mechanical properties (such as the tensile modulus and tensile strength) of polypropylene, polyethylene and polysiloxanes. Conventional polysiloxane-based prostheses require the use of adhesives, which may cause irritation to the patient [Wolfaardt, J.F. 1996]. Therefore, there is a need to identify other types of adhesives. Table 1 Selected physical and mechanical properties of common biocompatible polymerrs. a [Zhu, L. 199] F. et al. 1999] c Thermoset polymer d [Andrews, R.J., et al., 1999] e [Choi ,K.M. et al., 2003] f [DeLassus, P.T., et al., 1999] b [Bai, 7 CHAPTER III RESEARCH METHOD 1. CHEMICALS 2. GLASSWARE AND EQUIPMENT 3. METHODOLOGY 4. SCANNING ELECTRON MICROSCOPE 5. CONTACT ANGLE 8 CHAPTER IV RESULTS AND DISCUSSION 1. SCANNING ELECTRON MICROSCOPE 2. CONTACT ANGLE 9 CHAPTER V CONCLUSION 10 REFERENCES Gamble, T., Greenbaum, E., Jackman, T.R., Russell, A. P., Bauer, A. M., Castresana, J. June 27, 2012. Repeated Origin and Loss of Adhesive Toepads in Geckos. Scherge, M., Gorb, S., 2001. Biological Micro and Nano- Tribology. Springer-Verlag, New York. Niederegger, S., Gorb, S., Jiao, Y., 2002. Contact behaviour of tenent setae in attachment pads of the blowfly Calliphora vicina(Diptera,Calliphoridae).J.Comp.Physiol.A187, 961–970. Autumn K. How gecko toes stick. Am Sci 2006;94:124–32. Gao H., Wang X., Yao H., Gorb, S., Arzt E., 2005. Mechanics of hierarchical adhesion structures of geckos. Mechanics of Materials 275-285. Irschick, D. J., C. C. Austin, K. Petren, R. N. Fisher, J. B. Losos, and O. Ellers. 1996. A comparative analysis of clinging ability among pad- bearing lizards. Biol. J. Linn. Soc. 59:21–35. Ruibal, R., and V. Ernst. 1965. The structure of the digital setae of lizards. J. Morphol. 117:271–294. Autumn, K., M. Sitti, Y. A. Liang, A. M. Peattie, W. Hansen, S. Sponberg, T. W. Kenny, T. Fearing, J. N. Israelachvili, and R. J. Full. 2002. Evidence of van der Waals adhesion in gecko setae. Proc. Natl. Acad. Sci. USA. 99:12252–12256. Autumn, K., Y. A. Liang, S. T. Hsieh, W. Zesch, W. P. Chan, T. W. Kenny, R. Fearing, and R. J. Full. 2000. Adhesive force of a single gecko foot-seta. Nature. 405:681–685. Geim, A. K., S. V. Dubonos, I. V. Grigorieva, K. S. Novosedlov, A. A. Zhukov, and S. Y. Shapoval. 2003. Microfabricated adhesive mim- icking gecko foot-seta. Nat. Mater. 2:461–463. Israelachvili, J. N. 1992. Intermolecular and Surface Forces, 2nd Ed. Academic Press, New York. Nosonovsky, M., Bhushan, B., Multiscale Dissipative Mechanisms and Hierarchical Surfaces: Friction, Superhydrophobicity, and Biomimetics,Springer, Heidelberg, Germany, 2008. Adamson, A.W., Physical Chemistry of Surfaces, Wiley, NY, 1990. Bhushan, B., Principles and Applications of Tribology, Wiley, NY, 1999. Bhushan, B., Introduction to Tribology, Wiley, NY, 2002. Bhushan, B., Biomimetics; Bioinspired Hierarchical-Structured Surfaces for Green Science and Technology, Springer-Verlag, Heidelburg, Germany, 2012. Arzt, E., Gorb, S., Spolenak, R., Proc. Natl. Acad. Sci. USA 100 (2003) 10603. Autumn, K., MRS Bull. 32 (2007) 473. Bhushan, B., J. Adhes. Sci. Technol. 21 (2007) 1213. Bhushan, B., (Ed.), Springer Handbook of Nanotechnology, third ed., Springer,Heidelberg, Germany, 2010. 11 Cutkosky, M., Kim, S., Phil. Trans. R. Soc. A 367 (2009) 1799. Ruibal, R., Ernst, V., Morphol J. 117 (1965) 271. Autumn, K., Sitti, M., Liang, A.Y., Peattie, A.M., Hansen, W.R., Sponberg, S., Kenny, T.W., Fearing, R., Israelachvili,J.R., Full, J.R., Proc. Natl, Acad. Sci. USA 99 (2002) 12252. Bhushan B, Lee H. Fabrication and characterization of multi-level hierarchicalsurfaces. Faraday Discuss 2012;156:235–41. Lee H, Bhushan B. Fabrication and characterization of hierarchical nano-structured smart adhesion surfaces. J Colloid Interf Sci 2012;372:231–8. Kiat-amnuay S, Jacob RF, Chambers MS, Anderson JD, Sheppard RA, Johnston DA, et al. Clinical trial of chlorinated polyethylene for facial prosthetics.Int J Prosthodont 2010;23:263–70. Wolfaardt JF, Tam V, Faulkber MG, Prasad N. Mechanical behavior of three maxillofacial prosthetic adhesive systems: a pilot project. J Prosthet Dent1992;68:943–9. Zhu L, Chiu F-C, Fu Q, Quirk RP, Cheng SZD. Physical constants of poly-(ethylene). In: Brandrup J, Immergut EH, Grulke EA, editors. Polymer Handbook. 4th ed. New York: Wiley; 1999. p. V/9–19. Bai F, Li F, Calhoun BH, Quirk RP, Cheng SZD. Physical constants of poly(ethylene). In: Brandrup J, Immergut EH, Grulke EA, editors. Polymer Handbook. 4th ed. New York: Wiley; 1999. p. V/21–30. Andrews RJ, Grulke EA. Glass transition temperatures of polymers. In: Brandrup J, Immergut EH, Grulke EA, editors. Polymer Handbook. 4th ed. New York: Wiley; 1999. p. VI/193–277. Choi KM, Rogers JA. A photocurable poly(dimethylsiloxane) chemistry designed for soft lithographic molding and printing in the nanometer regime.J Am Chem Soc 2003;125:4060–1. DeLassus PT, Whiteman NF. Physical and mechanical properties of some important polymers. In: Brandrup J, Immergut EH, Grulke EA, editors. Polymer Handbook. 4th ed. New York: Wiley; 1999. p. V/159–69. 12