多軸運動控制器 題目: 以CAN Bus為基礎的分散式 即時伺服馬達控制器之設計與實作
advertisement

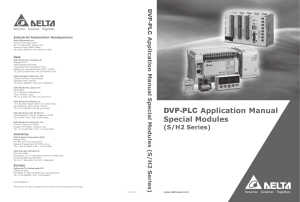
多軸運動控制器 題目: 以CAN Bus為基礎的分散式 即時伺服馬達控制器之設計與實作 研 究 生:廖建龍 指導教授:胡竹生 博士 課程名稱:運動控制概論 學生姓名:林冠廷 班 級:控晶四乙 學 號:4982C098 授課教師:王明賢 摘要 由於近年來多軸運動控制對產業界自動化生產扮演 越來越重要的角色,應用面也越來越廣泛,如CNC工具 機、放電加工機、工業機器人及半導體製程設備等,皆 需要一高效能精密運動控制器來實現。而應用分散式即 時網路技術來達成多軸同步運動控制,已成為目前伺服 驅動發展的趨勢。結合網路技術與伺服馬達的運動控制, 遂發展成即時網路控制系統。 • 研究動機與目的 隨著微處理器功能不斷提升與價格的不斷降低,使 得其應用也越來越普及。將微處理器應用於伺服控制系 統,其快速的計算能力及智慧型的軟體規劃能力,使得 我們可以更有彈性的設計控制器,獨立的對各軸伺服器 進行控制。這種不同於傳統多軸運動控制,而利用單一 組件進行獨立控制的觀念,發展出一套新的控制架構, 稱之為分散式控制(Distributed Control)。 分散式控制系統存在著一個重要的問題,就是各單 元間的通訊問題。本篇論文利用CAN Bus建構出一週期 式的通訊協定,主要是針對多軸的運動控制系統而設計 的。 • 研究背景與發展現況 運動控制系統由於須處理的訊號十分繁複,從路 徑規劃計算、人機監控程式以及系統的自我診斷,乃至 於多迴路的伺服控制器、PLC的周邊控制等,在資料的 運算量非常的龐大。在早期CPU功能不夠強的情況下, 往往無法應付如此繁複的運算,為了改善效能,許多單 晶片的運動控制卡因應而生,PC+運動控制卡的運動控 制系統逐漸成為市場上的主流。 • 本研究之貢獻 1.可因應不同需求彈性調整系統組態。 2.系統擴充性增加。 3.各單元間各自獨立,模組化設計更為容易。 4.提供各伺服模組的即時與同步協調控制。 5.系統具有多工處理能力,使系統執行更有效 率。 6.系統中某一單元發生錯誤時,不致造成整個 系統的損壞。 7.可靠度高,減低錯誤維修的困難度。 8.開放式網路架構,使用者可有不同的來源選 擇。 • 系統架構 本篇論文提出一以CAN Bus為基礎之即時工控網路架構, 整個架構如下圖系統架構圖所示: • 主要硬體設備 DSP EVM板: 為整個EVM板的設計概觀圖,主要包括了DSP TMS320F243、FPGA、SRAM、RS232 Transceiver及CAN Bus Transceiver等部分。主要負責的工作,包括對馬 達的控制與各EVM板間資料的傳輸。其中,資料的傳輸 部分是利用CAN Bus以EXTENDED FORMAT在baud rate為 1Mbits/s的速度進行傳輸。 驅動程式模組: Taunix的驅動程式依據Unix 的switch table來定義,設計出 d_open()、d_close()、d_read()、 d_write()及d_ioctl()等五組輸 出入的介面規格,藉由一致性的 介面規格,來保證控制程式的可 攜性與輸出入重導向的應用。另 外,Taunix亦支援回呼(call back)功能,以提供應用程式的快 速溝通,與實現非同步輸出入的 能力。回呼函式也可用作中斷處 理函式的延伸,加強現有中斷處 理函式的功能,而不必重新設計 中斷處理函式。驅動程式模組架 構如下圖所示。 CAN Bus介紹 CAN Bus為Controller Area Network Bus的縮寫[21], 是一種支援分散式即時控制,並且具有高安全性的序列 傳輸通訊協定,傳輸速度最快可達1 Mbits/s。根據 ISO/OSI參考模型,CAN Bus可以細分為幾個不同層: • Data Link Layer: 1.Logical Link Control (LLC) sublayer:提供資料 傳輸和遠端資料要求的服務,並且決定接收哪一個訊號。 2.Medium Access Control (MAC) sublayer:實現傳 輸通訊協定,包括控制傳輸資料的架構、執行仲裁、錯 誤檢查、錯誤處理及錯誤的限制。 • Physical Layer:定義如何將每個位元逐一送出,並 且處理傳輸同步、字元編碼及字元傳輸時間等事件。 系統實作 軌跡計算 軌跡的計算,利用T型、S型兩種加減速,提供點對點、 直線和圓弧三種軌跡的計算[23]。 加減速的目的 在於讓運動軌跡的執行更為平滑,減少對機構的傷害。 圖4.1為T型加減速,Jerk在連接點之間會有無限大 的脈衝響應,對機構而言是突然極大的加速度改變,會 造成衝擊而振動,對機台的精度和使用壽命都有不力的 影響。 圖4.2為S型加減速,Jerk為連續的有限值,所以對 於馬達的力矩輸出與減低機台振動都有明顯的改善。 T型加減速原理推導 已知的條件為:末速 Vf 、加速時間 TA 和路徑距離S。 如圖4.3所示,我們可以將加速段與減速段合併成一個 矩形來看,則時間 。整個路徑軌跡可以分成三個區段 來計算—加速段 、等速段 及減速段 。 S型加減速原理推導 已知條件與T型加減速相同,包括末速Vf 、加速時 間TA和路徑距離S。如圖4.4所示,整個路徑軌跡可分成 五個區段—加速段I 、加速段II 、等速段 、減速段I 和減速段II ,其中 。 防錯措施 我們設計PC端利 TEST FORMAT、WORK FORMAT 用 RS232 傳 送 資 料 的 格 式 如 圖 JOG FORMAT 4.5 所 示 , 可 分 為 TEST FORMAT 、 MOTION FORMAT WORK FORMAT 、 JOG FORMAT 、 MOTION FORMAT 及 ACK FORMAT 五 種 , 以 便 讓 DSP 端做為命令的判 ACK FORMAT 斷與提供防錯的 機制。 1st byte Cmd_Type 1st 2nd 3rd 4th 5th byte byte byte byte Cmd_Type Axis Dir Sum 1st 2nd 3rd 4th 5th 6th 7th 8th 9th byte byte byte bytes bytes Cmd_Type Last_Send Data_Num P_Arg Last 2 bytes Data Field Sum 1st 2nd 3rd 4th byte byte byte Cmd_Type Ack I_Arg Sum 圖 4.5 PC to DSP 之資料格式 人機介面 我們利用Borland C++ Builder 3.0設計一人機介面, 以提供使用者方便操作本系統。圖4.6為針對兩軸的系 統所設計之人機介面整體概觀圖: Paint Field 圖 4.6 人機介面 軌跡運動模式 使用者利用PtP、Line、Arc及Program Operation Interface,從PC端送出MOTION FORMAT的命令,讓系統 進入軌跡運動的模式。在軌跡運動模式下,DSP MASTER 必須即時地並行處理與PC、SLAVE之間的通訊及對馬達 進行控制;而DSP SLAVE除了對馬達作控制外,還需要 同時與MASTER進行資料雙向的傳輸。針對這些工作的處 理,我們設計利用Time Triggered Protocol[24][25] [26]來實現。 什麼是Time Triggered Protocol呢﹖簡單來說, 就是在固定的時間,規劃執行特定的工作。圖4.21為我 們設計在CAN Bus上,每個時間必須處理的工作;圖 4.22為在RS232上規劃出每個時間必須執行的動作。 系統狀態分析 整合4.3節工作流程與4.4節錯誤處理,我們繪出系 統工作狀態圖4.27,目的在方便使用者從PC端監控介面 上顯示的系統狀態,了解目前系統工作進行的方式,與 下個步驟使用者該如何操作。另外此狀態圖,亦提供離 散事件系統邏輯模型, 方便邏輯控制器和監控器之合成。 實驗數據 5 圖4.29為模擬CAN Bus斷線後,系統繼續 執行圓運動的軌跡,可 看出所設計之加減速效 果,且不影響原運動軌 跡。 x 10 °¨ ¹ F¹ ê»Ú¹ B°Ê- y¸ ñ(CAN BusÂ_½u«áÄ~Äò°õ¦ æ) 4 4 3 Y¶b 2 1 0 -1 -2 8 x 10 X¶b¦ ì ² ¾ 4 5 -3 7 -4 -2 5 3 0 2 4 pulse pulse Y¶b¦ ì ² ¾ 4 4 6 3 1 -2 0 -3 1000 2000 3000 4000 5000 sample 6000 7000 -4 8000 4 6 8 X¶b x 10 0 -1 0 2 1 2 -1 x 10 0 1000 2000 3000 X¶b³ t«× 4000 5000 sample 6000 7000 8000 6000 7000 8000 Y¶b³ t«× 50 60 40 40 pulses/sampling_time pulses/sampling_time 30 20 10 0 -10 -20 -30 20 0 -20 -40 -40 -50 0 1000 2000 3000 4000 5000 sample 6000 7000 8000 -60 0 1000 2000 3000 4000 5000 sample 4 下圖為系統利用圓、直線、點對點軌跡畫出之組合圖形。 結 論 在PC-Based控制器興起之前,整個工具機的市場幾 乎完全由幾個大廠如FANUC所把持,整個系統從馬達、 伺服驅動器、PLC、運動控制器到CAD/CAM的設計,全部 採集中式的控制架構,規模涵蓋整個系統,使得其他廠 商完全沒有插手的餘地。 應用於分散式控制系統架構的控制網路中,目前以 SERCOS發展最為成熟,是目前對於運動控制系統在軟體 通訊協定上定義最為完全的工業網路。但是由於SERCOS 利用光纖傳輸,使得價格偏高,另一方面在國內的相關 資源不易取得,因此在市場上的佔有率不是很高,無法 普及的應用於工業界。 參考文獻 • 許明景,何昌祐,「DSP-based 運動控制模組架構說明」,電機月刊,第七卷第五期,第 153至165頁,1993年5月。 • 何昌祐,「DSP用於PC-Based運動控制器之設計」,機械工業雜誌,民國八十七年四月。 • K. Bender et al. Profibus: The Fieldbus for Industrial Automation, Prentice-Hall, Englewood Cliffs, Nl, 1993. • G. Cena, C. Demartini and A. Valenzano, “A FIP prototype network for numerical control application, “IEEE, pp. 1196-1199, 1994. • Scott Hibbard, “The SERCOS interface standard – standardized digital interfaces drive ahead,” Vice President, Machine Tool Industry Group, Indramat Div. Of Rexroth Crop. • L. A. Berardinis, “SERCOS lights the way for digital drivers,” Machine Design Int., vol. 66, no. 16, pp. 52-55, 57-61, 63, 64, Aug. 22, 1994. • W. Lawrenz et al., “CAN controller area network,” Grundlagen und Praxis, Huthig Verlag, 1994. • J. Schill, “An overview of the CAN protocol,” Embedded Sys. Program, vol. 10, no. 9, pp. 46-48, 50, 57-8, 60, 62, Sept. 1997. • Kent Lennartsson, “Design of Mixed Higher Layer Protocol Systems,” http://www.kvaser.com/can/info/interart/index.htm • CANopen draft standard 301 revision 3.0, 30/10 1996. • Holger Zeltwanger, “CANopen network and its impact on motion control application,” Powerconvers Intell. Motion, pp. 281-288, May 29, 1998. • Mahammed Farsi and Karl Ratcliff, “Controlling with CANopen,” IEE Review., pp. 229-231, Sep. 1998. • • • • • • • • • • • • • • CAN Kingdom specification Version 3.01, 1/1 1996. http://content.honeywell.com/sensing/prodinfo/sds/ DeviceNet specification Version 2.0, February 1997. Simonye, S.; Alpena, L.; Witte, G. “Applying DeviceNet in motor control centers at a cement plant,” Cement Industry Technical Conference. 1997. XXXIX Conference Record., 1997 lEEE/PCA Published: 1997 , Page(s): 113 –123 E. Bassi, F. Benzi L. Lusetti, and G. S. Buja, “Communication Protocol for Electrical Drivers,” IEEE IECON Conf. Rec., pp.706-711, vol. 1, Orlando, FL, USA, Nov. 6-10, 1995. 胡竹生,尹燕陶,「即時多工核心程式設計」,全華書局,民國八十四年。 TI TMS320F243/F241/C242 DSP Controllers System and Peripherals Reference Guide. 許誌尤,「電動機車之馬達控制系統製作與弱激磁驅動策略研究」,碩士論文,交通大學 電機與控制研究所,民國八十九年六月 ISO 11898 Controller Area Network (CAN) for high speed communication. Brain Kirk, “Using software protocols to mask CAN bus insecurities,” Electomagnetic Compatibility Of Software (Ref. No. 1998/471), IEE Colloquium on , 1998 Page(s): 5/1 5/5. 賴鴻志、陳邦正、張勝凱,「三軸運動控制介面卡驅動程式開發及控制範例實作」,計劃 期末報告,交通大學電機與控制工程學系,民國八十八年九月。 Kopetz, H.; Grunsteidl, G., “TTP - A time-triggered protocol for fault-tolerant real-time systems,” Fault-Tolerant Computing, 1993. FTCS-23. Digest of Papers., The Twenty-Third International Symposium on , Aug. 1993 Page(s): 524 –533 Kopetz, H., “A solution to an automotive control system benchmark,” Real-Time Systems Symposium,” 1994., Proceedings. , 1994 Page(s): 154 –158 Bannatyne, R., “Time triggered protocol-fault tolerant serial communications for real-time embedded systems,” Wescon/98 , 1998 Page(s): 86 –91